1. Introduction
In the past few years, the development of robotic applications has gained tremendous growth in humanoids, wheeled mobile robots, and prostheses. This development has attracted many researchers worldwide to concentrate on artificial intelligence (AI) techniques. With the development of human working gaits to robot path planning, numerous methods have made locomotion easier. While optimization techniques have paved the way to obtaining the best path to reach the target, it has also successfully smoothened the traverse path. Several research works have been published in the past few years related to the path outlining of mobile robots using various artificial techniques. Gandomi & Alavi [Reference Gandomi and Alavi1] have introduced krill herd (KH) for optimization problems, in which simulation works are carried out and compared among them. Abualigah et al. [Reference Abualigah, Khader, Hanandeh and Gandomi2] have proposed this optimization technique for solving clustering problems. Rao et al. [Reference Rao, Kabat, Das and Jena3] have presented krill- herd optimization for navigational control of wheeled robots. Singh & Thongam [Reference Singh and Thongam4] have used fuzzy logic technique for the navigation of mobile robot in static environments. Chen et al. [Reference Chen, Jeng and Lin5] have proposed fuzzy logic for wall following wheeled robot. Ben & Seddik [Reference Ben Jabeur and Seddik6] have proposed PID tuned fuzzy logic for the control of robot. Muni et al. [Reference Muni, Parhi, Kumar and Kumar7, Reference Muni, Parhi, Kumar, Sahu, Dhal and Kumar8] have worked on controlling legged robots using hybrid fuzzy methods. Kumar et al. [Reference Kumar, Pandey, Muni and Parhi9, Reference Kumar, Parhi, Kashyap and Muni10] have compared different methods towards path optimization with a developed fuzzy-whale optimization approach in a cluttered stationary and moving obstacles environment. Apart from KH optimization and fuzzy logic technique, many other techniques are available for the control of mobile robots. For example, Mohanty et al. [Reference Mohanty and Parhi11] have presented their research on adequate path planning for mobile robots using the cuckoo search technique. The work focused on identifying the best optimal path for the locomotion of robots in an obscure scenario. Patle et al. [Reference Patle, Parhi, Jagadeesh and Kashyap12] discussed matrix binary-coded algorithms for robot trajectories. Recently, Kumar et al. [Reference Kumar, Parhi, Muni and Pandey13] have presented hybridized optimization technique for path optimization of multiple mobile robots in obscure scenarios. Singh et al. [Reference Singh and Parhi14] worked on the path optimization of mobile robot using an artificial neural network approach. Parhi et al. [Reference Parhi, Pradhan, Panda and Behera15] have worked on the controller for precise locomotion of the wheeled robot in an unknown environment. Pandey et al. [Reference Pandey, Kumar, Pandey and Parhi16, Reference Pandey and Parhi17] and Mohanty et al. [Reference Mohanty and Parhi18] have worked on wheeled robot navigation in an obscure workspace. Kim et al. [Reference Sim and Sun19] have presented an ant colony optimization technique for the loading balancing problem. Parhi et al. [Reference Pham and Parhi20–Reference Kundu and Parhi22] have presented different AI techniques for the traversal path of robots. Cruz et al. [Reference Contreras-Cruz, Ayala-Ramirez and Hernandez-Belmonte23] have expressed their research on mobile robots using artificial bee colony optimization techniques. Fen et al. [Reference Fen, Jiang-hai, Xiao-bo, Pei-ying, Shi-hui and Zhong-jie24] have presented an improved ACO technique for the analysis of problems. Muni et al. [Reference Muni, Parhi, Kumar, Pandey, Kumar and Chhotray25–Reference Muni, Kumar, Parhi and Pandey27] have developed fuzzy and water cycle approaches for navigational control of a humanoid robots. Kumar et al. [Reference Kumar, Parhi, Pandey and Muni28] have proposed a hybrid model for trajectory planning of mobile robots. Montiel et al. [Reference Montiel, Orozco-Rosas and Sepúlveda29] have explained bacterial foraging behavior for path planning of robots. Ahmed et al. [Reference Ahmed, Maged, Soliman, El-Hussieny and Magdy30] have proposed space deformation-based motion planning of mobile robots. Bolaji et al. [Reference Bolaji, Al-Betar, Awadallah, Khader and Abualigah31] have proposed a review on different AI techniques, including the KH optimization technique. Kumar et al. [Reference Kumar, Muni, Pandey, Chhotray and Parhi32, Reference Kumar, Parhi, Kashyap, Muni and Dhal33] have proposed metaheuristic approaches for trajectory outlining of robots. Wang et al. [Reference Wang, Chen, Zhang and Liu34] have proposed dynamic environment path planning using Fuzzy-artificial potential field approach. Dirik et al. [Reference Dirik, Kocamaz and Castillo35] have proposed vision-based global path planning of four-wheeled robots. Type-2 Fuzzy interface system has been used for performance analysis. Luo et al. [Reference Luo, Wang, Zheng and He36] have proposed an improved ant colony approach for path planning of mobile robots. Authors have introduced dynamic punishment approach for solving deadlock problems. Li et al. [Reference Li, Wang, Peng, Hu and Su37] have proposed Fuzzy- torque approach for lateral stability of robots and accurate trajectory planning. Teli and Wani [Reference Teli and Wani38] have presented autonomous navigation of robot by avoiding local optima. The problem statement has been solved using fuzzy-based approach. Luan & Thinh [Reference Luan and Thinh39] have proposed a hybrid GA (Genetic algorithm) approach for global path outlining of the wheeled robot. Authors have improved the GA by dynamic mutation rate and fluctuating local- global approach. Kim et al. [Reference Kim, Park, Cho and Kang40] have proposed UAV-assisted mobile robot navigation in a cluttered workspace. The robot has been used for 3D data collection during surveillance and topographical work. Hu et al. [Reference Hu, Zhang, Tan, Ruan, Agia and Nejat41] have proposed an approach for navigational control of robots in 3D rough terrains. A sim to real pipeline training pattered has been used for controlling the robot.
After perusal of the above-cited papers, it is observed that apart from path planning, a multi-objective technique is still needed in the present scenario. This manuscript discusses about the hybrid controller of modified Krill-Herd optimization and Fuzzy logic approach (MKH-Fuzzy) to accomplish a multi-objective optimized path planning method for mobile robots in unknown terrains. Multi-objectives comprise route outlining, time optimization, smooth navigation, and avoidance of local optimal points. All the objectives are encountered through the hybrid technique. Layout of the manuscript is as follows:
In Section 2, modified MKH optimization approach is discussed. In Section 3, the fuzzy-logic controller is elaborated. The hybridization model of both techniques are discussed in Section 4. In Section 5, Petri-net controller is presented. Simulation and experimental analyses are carried out using hybrid MKH-FLC in Section 6. The proposed controller is compared against existing technique, and the details is presented in Section 7. Conclusion and future scopes are presented in Section 8.
2. Modified Krill-Herd optimization approach
The krill-herd optimization technique is a bio-inspired continuous optimization technique [Reference Bolaji, Al-Betar, Awadallah, Khader and Abualigah31], which is well known to optimize problems. The word krill refers to the small fishes, and the krill’s group is called a herd. The optimization approach deals with the hunting style of krill in an ocean. They used to chase food sources in a herd by maintaining communication with each other, and this hunting style is the motivation of the algorithm. A
 ${}^{\prime} n{}^{\prime} $
dimensional search space is considered with random generation of
${}^{\prime} n{}^{\prime} $
dimensional search space is considered with random generation of
 ${}^{\prime} {P_n}{}^{\prime} $
number of krills. The individual krill position vector is initialized as per the following equation [Reference Rao, Kabat, Das and Jena3].
${}^{\prime} {P_n}{}^{\prime} $
number of krills. The individual krill position vector is initialized as per the following equation [Reference Rao, Kabat, Das and Jena3].
 \begin{align}T_i^j = T_{\min }^j + ran{d_j}\left( {T_{\max }^j - T_{\min }^j} \right)\end{align}
\begin{align}T_i^j = T_{\min }^j + ran{d_j}\left( {T_{\max }^j - T_{\min }^j} \right)\end{align}
The maximum and minimum limit of search space is denoted as
 ${}^{\prime} T_{\max }^n{}^{\prime}$
and
${}^{\prime} T_{\max }^n{}^{\prime}$
and
 ${}^{\prime} T_{\min }^n{}^{\prime} $
, which is in
${}^{\prime} T_{\min }^n{}^{\prime} $
, which is in
 $j \in [1,2,3\ldots\ldots\ldots n]$
. The movement of krill is an essential part of this optimization, as it searches the location of food so that the herd can find a prey source. Let the ocean be an
$j \in [1,2,3\ldots\ldots\ldots n]$
. The movement of krill is an essential part of this optimization, as it searches the location of food so that the herd can find a prey source. Let the ocean be an
 $n$
-dimensional space. Through “Lagrangian” approach, the movement of krill-herd is mathematically formulated as [Reference Fen, Jiang-hai, Xiao-bo, Pei-ying, Shi-hui and Zhong-jie24];
$n$
-dimensional space. Through “Lagrangian” approach, the movement of krill-herd is mathematically formulated as [Reference Fen, Jiang-hai, Xiao-bo, Pei-ying, Shi-hui and Zhong-jie24];
 \begin{align}\frac{{d{S_i}}}{{dt}} = {N_i} + {F_i} + {D_i}\end{align}
\begin{align}\frac{{d{S_i}}}{{dt}} = {N_i} + {F_i} + {D_i}\end{align}
Where
 ${}^{\prime} {S_i}{}^{\prime} $
is the original motion of the
${}^{\prime} {S_i}{}^{\prime} $
is the original motion of the
 ${i^{th}}$
krill.
${i^{th}}$
krill.
 ${}^{\prime} {N_i}{}^{\prime} $
is the motion influenced by closest krill.
${}^{\prime} {N_i}{}^{\prime} $
is the motion influenced by closest krill.
 ${}^{\prime} {F_i}{}^{\prime} $
is foraging locomotion and
${}^{\prime} {F_i}{}^{\prime} $
is foraging locomotion and
 ${}^{\prime} {D_i}{}^{\prime} $
is randomly selected diffusion of the krill. These above parameters are required prime attention to find an optimal location of food source, So that is formulated as per the following smooth calculation of the krill locomotion happens which are as follows:
${}^{\prime} {D_i}{}^{\prime} $
is randomly selected diffusion of the krill. These above parameters are required prime attention to find an optimal location of food source, So that is formulated as per the following smooth calculation of the krill locomotion happens which are as follows:
-
Krill movement with each other (
 ${N_i}$
).
${N_i}$
). -
Searching or foraging motion (
${F_i}$
). -
Random diffusion of Krills (
${D_i}$
).



• The individual Krill locomotion may be represented as:
Before moving to herd movement calculation, it is necessary to find
 ${}^{\prime} {N_i}{}^{\prime} $
; therefore mathematical calculation is given in Eq. (3).
${}^{\prime} {N_i}{}^{\prime} $
; therefore mathematical calculation is given in Eq. (3).
 \begin{align}N_i^{New} = {N^{\max }}{l_i} + {\omega _n}N_i^{old}\end{align}
\begin{align}N_i^{New} = {N^{\max }}{l_i} + {\omega _n}N_i^{old}\end{align}
Where
 ${}^{\prime} {N^{\max }}{}^{\prime} $
= Maximum motion-induced.
${}^{\prime} {N^{\max }}{}^{\prime} $
= Maximum motion-induced.
 ${}^{\prime} {\omega _n}{}^{\prime} $
= Inertia weight [0,1].
${}^{\prime} {\omega _n}{}^{\prime} $
= Inertia weight [0,1].
 ${}^{\prime} N_i^{old}{}^{\prime} $
= Last induced motion and
${}^{\prime} N_i^{old}{}^{\prime} $
= Last induced motion and
 ${}^{\prime} {l_i}{}^{\prime} $
= Direction of navigation and it can be calculated as
${}^{\prime} {l_i}{}^{\prime} $
= Direction of navigation and it can be calculated as
 \begin{align}{l_i} = {l_{i(present)}} + {l_{i(t\arg et)}}\end{align}
\begin{align}{l_i} = {l_{i(present)}} + {l_{i(t\arg et)}}\end{align}
These two parameters of
 ${}^{\prime} {l_i}{}^{\prime} $
are called the local effect of Krill, and these effects occur during the movement of bulk krill and target location of prey.
${}^{\prime} {l_i}{}^{\prime} $
are called the local effect of Krill, and these effects occur during the movement of bulk krill and target location of prey.
• The foraging motion of Krill-Herd is depends on 2-parameters:
-
Location of the food.
-
Prior knowledge of food location.
The foraging movement of krill is formulated as follows;
 \begin{align}{F_{i,\bmod }} = {V_f}{\beta _i} + {\omega _f}F_i^{old}\end{align}
\begin{align}{F_{i,\bmod }} = {V_f}{\beta _i} + {\omega _f}F_i^{old}\end{align}
Where
 ${}^{\prime} {V_f}{}^{\prime}$
= foraging speed (=0.02),
${}^{\prime} {V_f}{}^{\prime}$
= foraging speed (=0.02),
 ${}^{\prime} {\beta _i}{}^{\prime}$
=
${}^{\prime} {\beta _i}{}^{\prime}$
=
 ${i^{th}}$
position of krill,
${i^{th}}$
position of krill,
 ${}^{\prime} {\omega _f}{}^{\prime} $
= inertia weight (= [0,1]), and
${}^{\prime} {\omega _f}{}^{\prime} $
= inertia weight (= [0,1]), and
 ${}^{\prime} F_i^{old}{}^{\prime} $
= last foraging motion. The
${}^{\prime} F_i^{old}{}^{\prime} $
= last foraging motion. The
 ${i^{th}}$
position of krill can be calculated as;
${i^{th}}$
position of krill can be calculated as;
 \begin{align}{\beta _i} = \beta _i^{food} + \beta _i^{best}\end{align}
\begin{align}{\beta _i} = \beta _i^{food} + \beta _i^{best}\end{align}
 ${}^{\prime} \beta _i^{food}{}^{\prime} $
denotes the attracting parameters for food and
${}^{\prime} \beta _i^{food}{}^{\prime} $
denotes the attracting parameters for food and
 ${}^{\prime} \beta _i^{best}{}^{\prime} $
denotes best position of
${}^{\prime} \beta _i^{best}{}^{\prime} $
denotes best position of
 ${i^{th}}$
krill.
${i^{th}}$
krill.
• The random diffusion can be calculated as:
 \begin{align}{D_i} = {D^{\max }}\delta \end{align}
\begin{align}{D_i} = {D^{\max }}\delta \end{align}
Where
 ${}^{\prime} {D^{\max }}{}^{\prime} $
= maximum diffusion speed, and
${}^{\prime} {D^{\max }}{}^{\prime} $
= maximum diffusion speed, and
 ${}^{\prime} \delta {}^{\prime} $
= random directional vector.
${}^{\prime} \delta {}^{\prime} $
= random directional vector.
2.1. Modification of Krill-Herd (MKH) optimization technique
The primary objective of route outlining is to determine a smooth optimal path. The parametric values are chosen randomly in basic KH technique, which leads to a delay in convergence time. Therefore, the parameters are modified intelligently and implemented for optimal path search to provide IPA. The modified foraging motion is represented with linearly decreasing terms in [−1, 1] in Eq. (8).
 \begin{align}{F_{i,\bmod }} = \left( {{V_f}{\beta _i} + {\omega _f}F_i^{old}} \right)\left( {1 - \frac{{{i^{th}}\,iter}}{{\max - iter}}} \right)\end{align}
\begin{align}{F_{i,\bmod }} = \left( {{V_f}{\beta _i} + {\omega _f}F_i^{old}} \right)\left( {1 - \frac{{{i^{th}}\,iter}}{{\max - iter}}} \right)\end{align}
Where
 ${}^{\prime} {i^{th}}\,iter{}^{\prime} $
is the value at
${}^{\prime} {i^{th}}\,iter{}^{\prime} $
is the value at
 ${i^{th}}$
iteration, and
${i^{th}}$
iteration, and
 ${}^{\prime} \max - iter{}^{\prime} $
is the maximum iteration value. In addition, the linearly decreasing term is added with a random defusing motion for fast convergence, which is shown in Eq. (9).
${}^{\prime} \max - iter{}^{\prime} $
is the maximum iteration value. In addition, the linearly decreasing term is added with a random defusing motion for fast convergence, which is shown in Eq. (9).
 \begin{align}{D_{i,\,\bmod }} = {D^{\max }}\delta \left( {1 - \frac{{{i^{th}}\,iter}}{{\max - iter}}} \right)\end{align}
\begin{align}{D_{i,\,\bmod }} = {D^{\max }}\delta \left( {1 - \frac{{{i^{th}}\,iter}}{{\max - iter}}} \right)\end{align}
After maximum iteration,
 ${}^{\prime} {i^{th}}{}^{\prime} $
krill updates its position to new global optima, which is calculated as
${}^{\prime} {i^{th}}{}^{\prime} $
krill updates its position to new global optima, which is calculated as
 \begin{align}{S_i}\left( {t + \Delta t} \right) = {S_i}\left( t \right) + \Delta t\frac{{d{S_i}}}{{dt}}\end{align}
\begin{align}{S_i}\left( {t + \Delta t} \right) = {S_i}\left( t \right) + \Delta t\frac{{d{S_i}}}{{dt}}\end{align}
 ${}^{\prime} \Delta t{}^{\prime} $
represents the time interval that depends on the environmental condition of robot, and it is expressed as;
${}^{\prime} \Delta t{}^{\prime} $
represents the time interval that depends on the environmental condition of robot, and it is expressed as;
 \begin{align}\Delta t = {V_i}\sum\limits_{p = 1}^x {\left( {T_{\max }^x - T_{\min }^x} \right)} \end{align}
\begin{align}\Delta t = {V_i}\sum\limits_{p = 1}^x {\left( {T_{\max }^x - T_{\min }^x} \right)} \end{align}
Where
 ${}^{\prime} T_{\max }^x{}^{\prime} $
and
${}^{\prime} T_{\max }^x{}^{\prime} $
and
 ${}^{\prime} T_{\min }^x{}^{\prime} $
denotes the maximum and minimum limit of
${}^{\prime} T_{\min }^x{}^{\prime} $
denotes the maximum and minimum limit of
 ${}^{\prime} {p^{th}}{}^{\prime} $
variable dimension [
${}^{\prime} {p^{th}}{}^{\prime} $
variable dimension [
 $p \in (1,2,3,4......x)$
] respectively.
$p \in (1,2,3,4......x)$
] respectively.
 ${}^{\prime} {V_i}{}^{\prime} $
is a constant in [0,1] and used for krills to provide safe position of locomotion. The pseudocode for modified krill-herd optimization is depicted in Fig. 1, which shows the process of obtaining solutions.
${}^{\prime} {V_i}{}^{\prime} $
is a constant in [0,1] and used for krills to provide safe position of locomotion. The pseudocode for modified krill-herd optimization is depicted in Fig. 1, which shows the process of obtaining solutions.

Figure 1. Pseudocode for MKH optimization technique.
3. Fuzzy logic controller (FLC)
Fuzzy logic is one of the simplest controllers to solve significant area problems. The human behaviour of reasoning inspires it. The controller works on rules (IF-THEN rules) that are framed to train the controller. While solving the problems, the FLC progressed through a number of steps, such as fuzzification of inputs implies conversation of numeric value to fuzzy code, rule generation, and defuzzification of outputs. The used model is shown in Fig. 2.
In this model, four inputs are considered such as ‘DOLO’ (Distance of left obstacles), ‘DORO’ (Distance of right obstacles), ‘DOFO’ (Distance of front obstacles) and ‘IPA’ (Initial Piloting angle); however, one output is generated as ‘FPA’ (Final Piloting angle). The range of inputs is considered from 0 to 30, and the range of piloting angle is −90 to +90 degrees. A rule base of 200rules is framed to implement the FLC. The inputs and output membership functions are shown in Fig. 3.
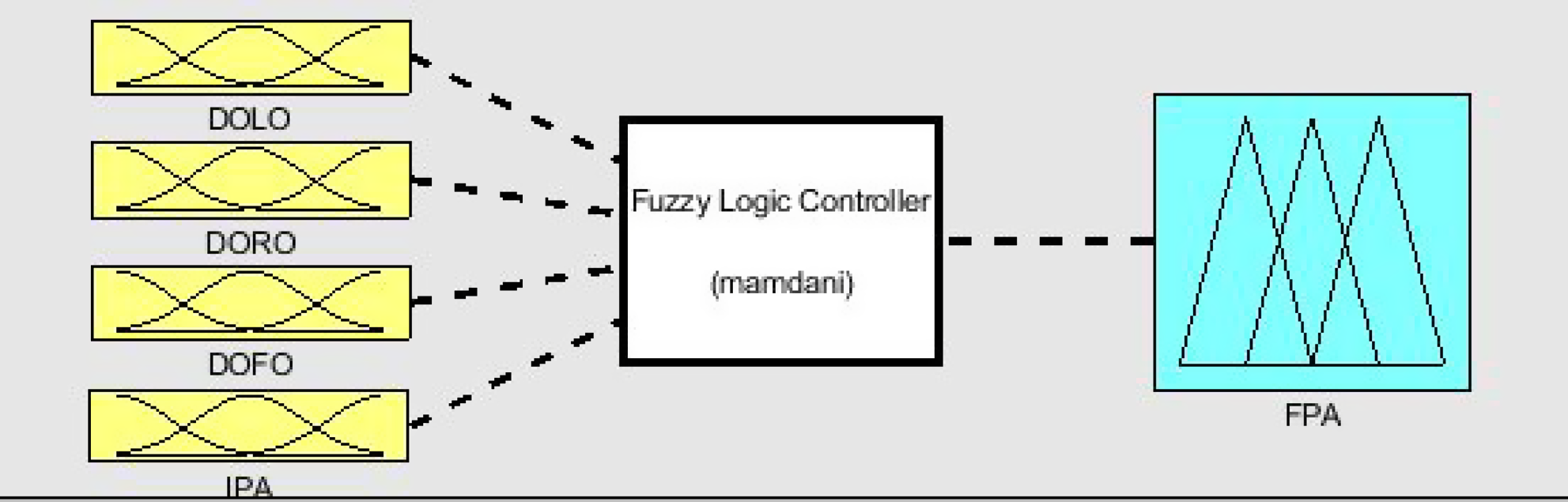
Figure 2. Fuzzy logic controller model.
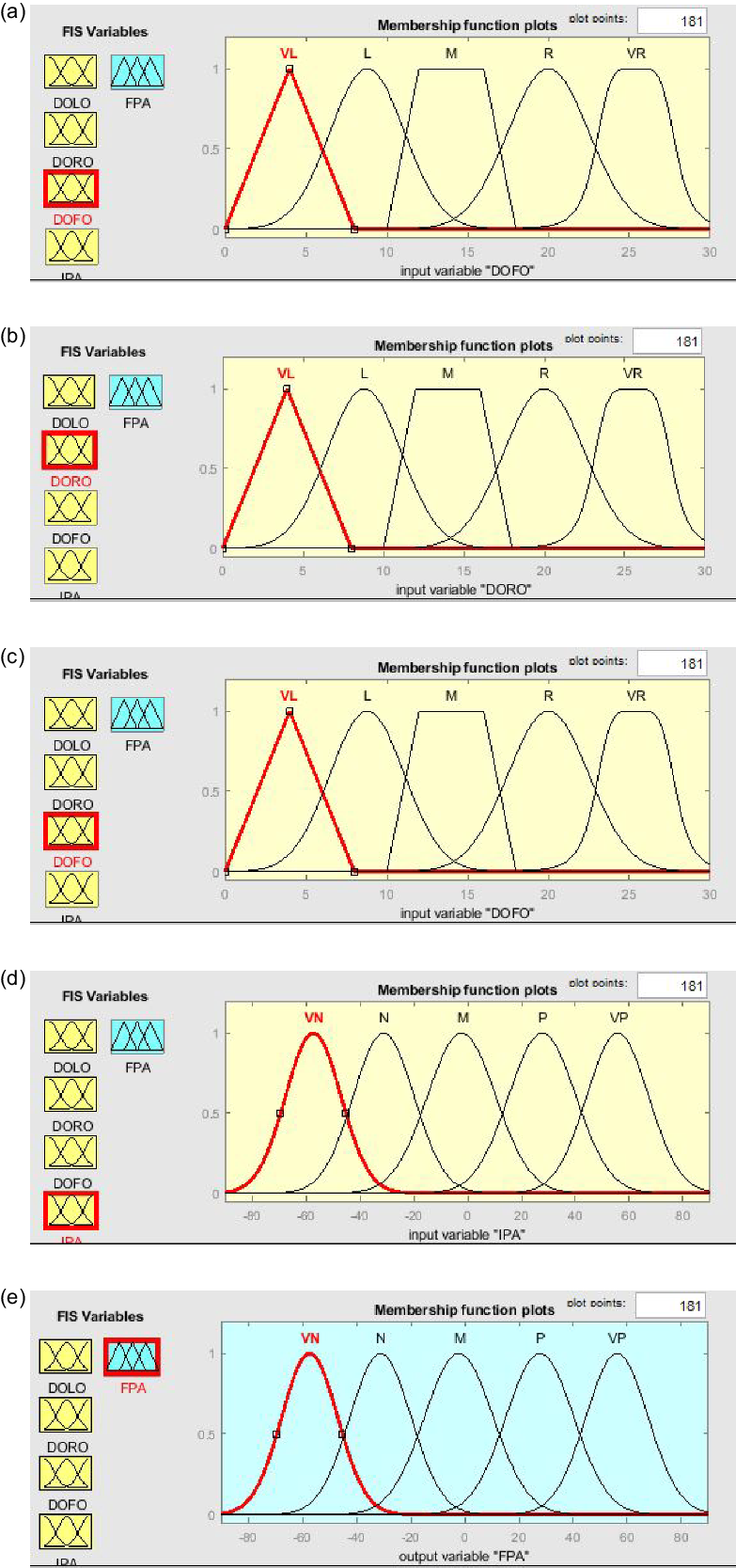
Figure 3. Fuzzy membership function for inputs and output.
While designing FLC, the variables of robot navigation (membership function) are carefully included in input and output. There are five variables are considered such as ‘VL’ (Very left), ‘L’ (left), ‘M’ (Medium), ‘R’ (Right), ‘VR’ (Very right) for distance inputs, and ‘VN’ (Very Negative), ‘N’ (Very negative), ‘M’ (Medium), ‘P’ (Positive), ‘VP’ (Very positive) are considered for angle output.
The framed rules and output generation is shown in Figs. 4 and 5. The relation between input and output is shown through the surface plot in MATLAB, shown in Fig. 6.

Figure 4. Rules base.
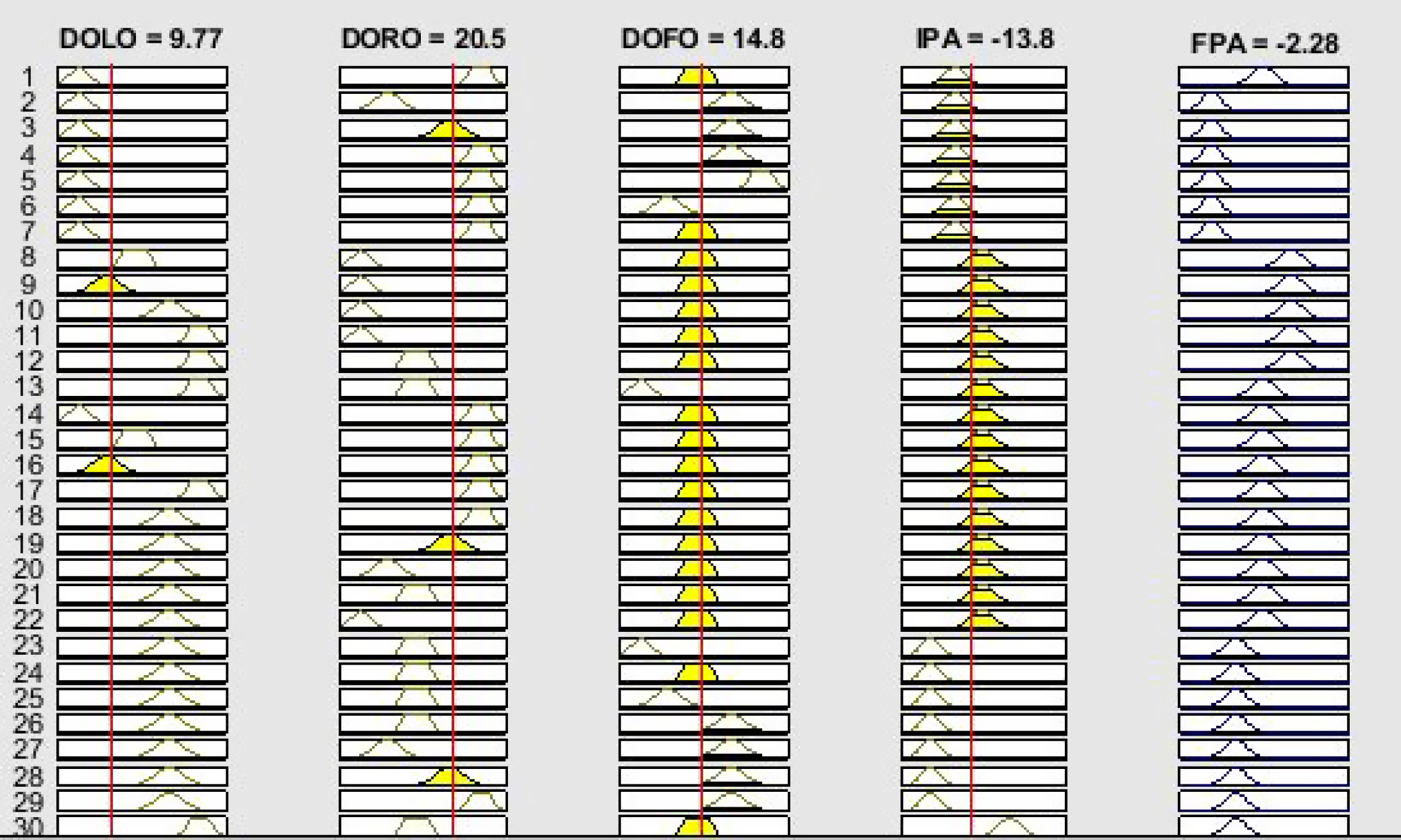
Figure 5. Output rule generator.

Figure 6. Surface plot.
Let the input and output membership variables DOLO, DORO, DOFO, IPA, and FPA be symbolized as ‘L’, ‘R’, ‘F’, ‘A 1’ and ‘A 2’ respectively. ‘x’, ‘y’, and ‘z’ are the membership adjusting constant. The fuzzification of input and output variables are expressed as [Reference Kumar, Parhi, Kashyap and Muni10]:
 \begin{align} {\eta _1}(L) = \frac{1}{{1 + {{\left[ {\frac{{L - {z_1}}}{{{x_1}}}} \right]}^{2{y_1}}}}}\end{align}
\begin{align} {\eta _1}(L) = \frac{1}{{1 + {{\left[ {\frac{{L - {z_1}}}{{{x_1}}}} \right]}^{2{y_1}}}}}\end{align}
 \begin{align} {\eta _2}(R) = \frac{1}{{1 + {{\left[ {\frac{{R - {z_2}}}{{{x_2}}}} \right]}^{2{y_2}}}}}\end{align}
\begin{align} {\eta _2}(R) = \frac{1}{{1 + {{\left[ {\frac{{R - {z_2}}}{{{x_2}}}} \right]}^{2{y_2}}}}}\end{align}
 \begin{align} {\eta _3}(F) = \frac{1}{{1 + {{\left[ {\frac{{F - {z_3}}}{{{x_3}}}} \right]}^{2{y_3}}}}}\end{align}
\begin{align} {\eta _3}(F) = \frac{1}{{1 + {{\left[ {\frac{{F - {z_3}}}{{{x_3}}}} \right]}^{2{y_3}}}}}\end{align}
 \begin{align} {\eta _4}({A_1}) = \frac{1}{{1 + {{\left[ {\frac{{{A_1} - {z_4}}}{{{x_4}}}} \right]}^{2{y_4}}}}}\end{align}
\begin{align} {\eta _4}({A_1}) = \frac{1}{{1 + {{\left[ {\frac{{{A_1} - {z_4}}}{{{x_4}}}} \right]}^{2{y_4}}}}}\end{align}
The weighted average method is used to calculate the defuzzified value of output (
 ${A_2}^ * $
), shown in Eq. (16).
${A_2}^ * $
), shown in Eq. (16).
 \begin{align}{A_2}^ * = \sum {\frac{{{\eta _1}(L) \cdot {\eta _2}(R) \cdot {\eta _3}(F) \cdot {\eta _1}({A_1}) \cdot {A_2}}}{{{\eta _1}(L) \cdot {\eta _2}(R) \cdot {\eta _3}(F) \cdot {\eta _1}({A_1})}}} \end{align}
\begin{align}{A_2}^ * = \sum {\frac{{{\eta _1}(L) \cdot {\eta _2}(R) \cdot {\eta _3}(F) \cdot {\eta _1}({A_1}) \cdot {A_2}}}{{{\eta _1}(L) \cdot {\eta _2}(R) \cdot {\eta _3}(F) \cdot {\eta _1}({A_1})}}} \end{align}
4. Hybrid MKH-fuzzy controller model
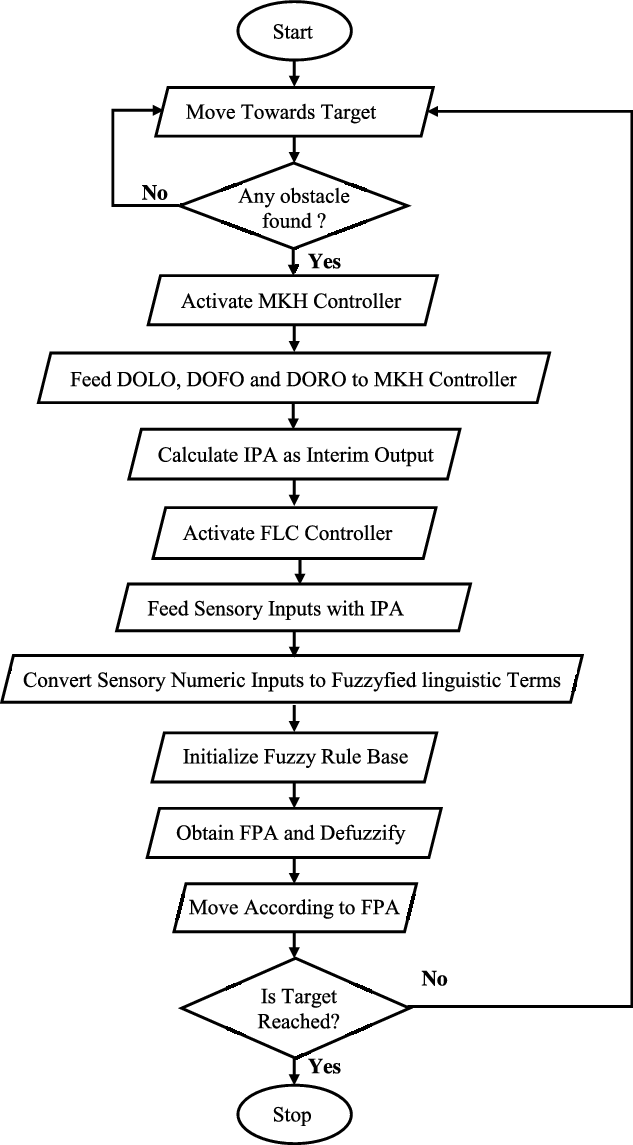
The aim of developing a hybrid controller is to overcome the limitations of standalone algorithms. Robot navigation and trajectory optimization have always remained as one of the challenging research that requires accurate navigational parameters along with fast convergence. The basic advantage of classical method is fast convergence rate, whereas the reactive approach gives optimal value. Therefore, the combination of classical practice and reactive technique is developed and implemented on robots. In this model, two stages of hybridized is proposed. The initial inputs DORO, DOLO, and DOFO (Sensory information) are fed to the MKH model, and the interim output is considered as the first output. In the second phase, the output (IPA) from MKH model and sensory information (DORO, DOLO, DOFO) are fed to FLC. Further, the FLC calculates the final piloting angle (FPA) used by the robot to escape obstacles and achieve target. The hybrid model of FLC is shown in Fig. 2. The flow chart of the hybrid model is shown in Fig. 7.

Figure 7. Flowchart of proposed hybrid controller.
The whole process of hybrid controller may be summarized as
-
State location of start and target.
-
Robot follows target until the obstacle is detected within the threshold range.
-
Once an obstacle is detected, the MKH model activates.
-
The initial inputs, DORO, DOLO, DOFO, are fed into the MKH model and find IPA as interim output.
-
IPA along with DORO, DOLO, DOFO are fed to the FLC controller.
-
Calculate FPA according to the rules of FLC.
-
FPA is provided to the robots that help to move forward.
5. Petri-net controller
The hybrid MKH-Fuzzy approach is intelligent enough to navigate from start to target points. However, it cannot perform well at conflict situation during multiple robot navigation due to several robots detecting multiple dynamic obstacles. At that time, one robot treats others as an obstacle, and confusion occurs among the robots regarding which robot should move first and complete the task. According to the controller, all the robots start their journey, and there is a chance of inter-collision. A Petri-net controller is added [Reference Muni, Parhi, Kumar and Kumar7] to overcome the inter-collision situation and enhance the controller, whose function is to provide priority related to the motion of robots.
Figure 8 elaborates all stages of the Petri-net network model, and each phase are described as follows:
-
Stage 1: The first stage is the waiting stage for each randomly placed robot. Here, randomly implies robot location is unknown. It waits until the command is released to move towards the target.
-
Stage 2: In this stage, each robot starts its journey. They may sense some obstacles during navigation.
-
Stage 3: In this stage, robots find some obstacles.
-
Stage 4: This stage is termed as decision stage as the Petri-net controller decides the priority of movement. It implies the preference is given to that robot which is nearest to the goal-point among the robots. During the movement of priority robot, other robots act as stationary obstacles at their locations till the threshold range.
-
Stage 5: This stage is known as the scrutiny stage, where the robots search whether any conflict of movement exists or not. If not found any conflict, then move towards the target.
-
Stage 6: If the priority robot finds any new robot, it behaves like a stationary obstacle and waits until the priority robot crosses the threshold distance. Later, the waiting robot completes its task from stage 2.

Figure 8. Petri-net Network [Reference Muni, Parhi, Kumar and Kumar7].
With the above-discussed steps of the Petri-net controller, the navigation of multiple robots in a shared workspace can be performed with ease.
6. Execution of proposed hybrid MKH-fuzzy controller
The developed hybrid controller is implemented on simulation and real-time experiments by considering the Khepera-II robot (Fig. 9) on the navigation platform. Here, navigation of single and multiple robots has been performed in the designed environments. Only hybrid controller is implemented in single robot navigation; however, hybrid controller with Petri-net controller is executed in multiple robot analysis to avoid conflict situations.

Figure 9. Description of K-II robot.
6.1. Navigation of single robot
As MATLAB has gained immense popularity among researchers to demonstrate navigational problems, it has been used as a simulation platform in single and multiple robot analysis. An arena of size
 $200 \times 200\;c{m^2}$
is allocated for analysis on both the simulation and experimental platforms. A cluttered environment has been created with the help of rectangular and hexagonal obstacles, as shown in experimental figures. The real-time experiment is conducted under laboratory conditions by creating the exactly same environment as simulation. The navigational analysis is shown in Figs. 10 and 11, and the results are recorded in Tables I and II.
$200 \times 200\;c{m^2}$
is allocated for analysis on both the simulation and experimental platforms. A cluttered environment has been created with the help of rectangular and hexagonal obstacles, as shown in experimental figures. The real-time experiment is conducted under laboratory conditions by creating the exactly same environment as simulation. The navigational analysis is shown in Figs. 10 and 11, and the results are recorded in Tables I and II.
Table I. Path length in experimental analysis.

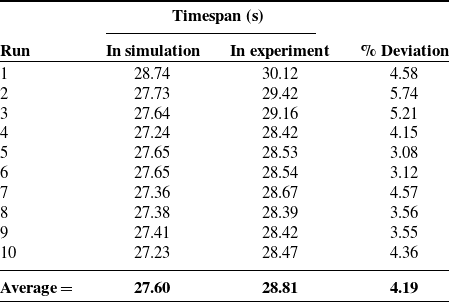
Table II. Timespan in experimental analysis.
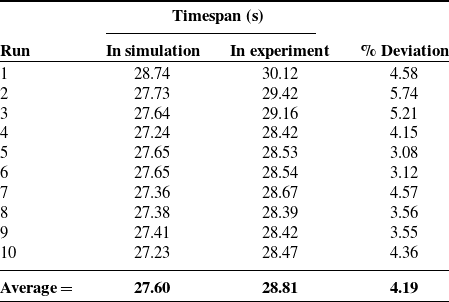

Figure 10. Simulation analysis on MATLAB platform.
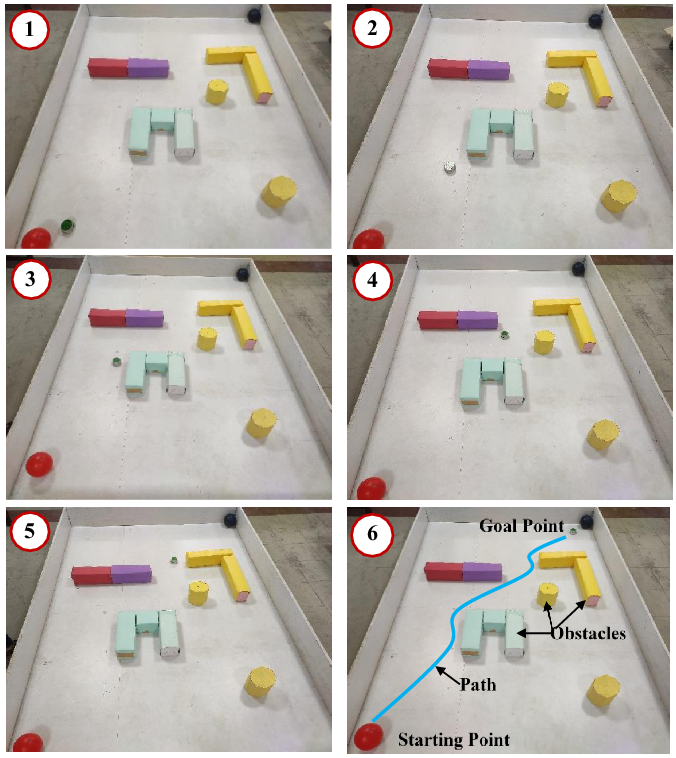
Figure 11. Real-time experimental analysis.
After perusal of the results mentioned above, it has been observed that the hybrid controller performed well in both environments as earned less than 5% of deviation in results. In robotic research, it is said that below 5% is an acceptable range of deviation; actually, the reason behind this, is wheel slippage, friction, internet connectivity, etc.
6.2. Navigation of multiple robots
Multiple robot navigation is quite different from single robot navigation. As stated above, a Petri-net controller has been added for smooth negotiation of dynamic obstacles and avoidance of robots’ inter-collision. The arena size is kept similar to single robot navigation; however, the workspaces have been created by placing different blocks arbitrarily with predefined start points and target points. While applying the hybrid model with Petri-net controller, each robot starts moving towards its respective targets by avoiding static and dynamic obstacles. Moving robots are treated as dynamic obstacles in multiple robot analyses. Two robots and four robots have been used to execute the hybrid controller on MATLAB in scenes 1 and 2, as shown in Figs. 12 and 13. The outcomes of simulation analysis are validated through real-time experiments as shown in Figs. 14 and 15. The simulation and real-time experimental results are presented in Tables III, IV, V, and VI.
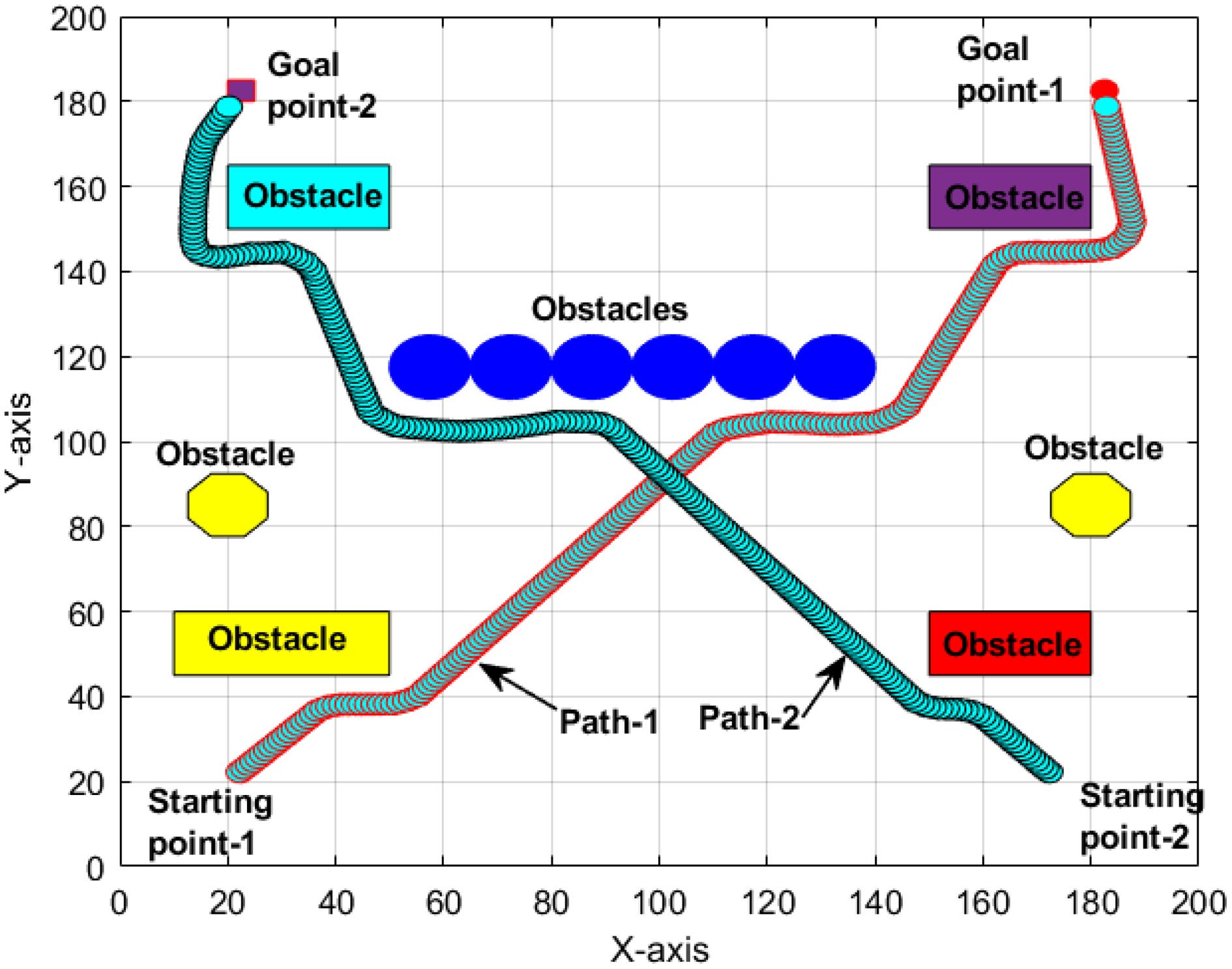
Figure 12. Navigational analysis in scene-1.

Figure 13. Navigational analysis in scene-2.

Figure 14. Real-time experimental analysis with two robots in scene-1.

Figure 15. Real-time experimental analysis with four robots in scene-2.
Table III. Path length in scene-1.

Table IV. Time consumption in scene-1.

Table V. Path length in scene-2.

Table VI. Time consumption in scene-2.

The evaluation of results from single and multiple robot navigation has imposed a satisfactory outcome that says that the developed hybrid controller is well established and performed in static and dynamic environments by optimal negotiation of obstacles. The hybrid controller has also revealed satisfactory time optimization. An acceptable range of deviation in results signifies proper execution and effective working of the proposed hybrid controller.
6.3. Analysis with Khepera-III robot
Along with a similar kind of robot, it is required to check the hybrid controller with a different one. Therefore, the Khepera-III robot is utilized in V-Rep simulation platform by implementing the developed controller. The outcomes of navigational analysis in V-REP has signified the compatibility of proposed controller with different platforms and dissimilar robots. The simulation analysis is shown in Fig. 16, and the results are in Table VII.

Figure 16. V-Rep navigational analysis.
Table VII. Result of navigational analysis in V-Rep.

From the above Figures and Tables, it is observed that the proposed approach is adequately utilized the controller with Khepera-III robots. The deviation in the results shows good agreement between both the evaluating platforms as it is within 5%. The variation or error between both the platforms is occurred due to surface roughness, wheel slippage, surface friction, etc.
7. Comparative analysis
In order to authenticate the simulation and real-time experimental results, a comparison between proposed controller and recognized or existing approach is required. Therefore, particle swarm optimization (PSO) and artificial bee colony (ABC) algorithms are considered for comparison in an environment. Figure 17 shows the trajectories traced by PSO, ABC, and MKH-Fuzzy techniques. The path lengths and time consumed by the robot using above mentioned techniques are recorded in Table VIII. Further, comparative bar charts are plotted as shown in Figs. 18 and 19, and convergence curves for the mentioned techniques are shown in Fig. 23. In addition to the above comparison, the proposed technique (MKH-Fuzzy) is again compared with the existing research paper [Reference Fen, Jiang-hai, Xiao-bo, Pei-ying, Shi-hui and Zhong-jie24], and an average improvement of 14.26% is found in path length. Figs. 20 and 21 show the paths generated by BPF [Reference Fen, Jiang-hai, Xiao-bo, Pei-ying, Shi-hui and Zhong-jie24] and proposed approaches, and the results are recorded in Table IX. Path length comparison bar chart is shown in Fig. 22.
Table VIII. Comparative table for path length and time consumption.

Table IX. Comparison table for path length [Reference Fen, Jiang-hai, Xiao-bo, Pei-ying, Shi-hui and Zhong-jie24].

GPF: Genetic potential filed, PBFP: Pseudo-bacterial potential filed.

Figure 17. Comparison among PSO (Path-A), ABC (Path- B) and MKH-Fuzzy (Path-C) Techniques for path length and time consumption.

Figure 18. Path length comparison plot.

Figure 19. Time consumption comparison plot.

Figure 20. The path traced by bacterial potential field technique (PBF) [Reference Fen, Jiang-hai, Xiao-bo, Pei-ying, Shi-hui and Zhong-jie24].

Figure 21. The path traced by the MKH-Fuzzy controller (Proposed Technique).

Figure 22. Path length comparison histogram.

Figure 23. Convergence curve between PSO, ABC, and MKH-Fuzzy Controller.
The convergence graph shows the relation between path length obtained and number of iterations. Graph shows the fluctuation of length with iterations. Beginning of flat line indicates convergence of result implies the best solution is obtained. The graph also indicates the comparison between the approaches.
8. Conclusions and future scopes
This paper describes the navigational control of Khepera-II and Khepera-III robots using hybrid (MKH-Fuzzy) optimization approach aided Petri-net controller in unknown terrains. The aim of the proposed technique is achieved by successfully navigating the robots up to target without any collision within optimized time after avoiding local optima. The proposed approach is tested against other methods, and an average improvement of approximately 10% is remarked.
Additionally, the proposed technique is again tested against the existing research paper, and an average improvement of 14.26% is noted in terms of path length, which authenticates the proposed approach. In the future, the method may give an upper hand to the scholars of robotics to understand the scenario of route planning of robots. It can be applied to the real automation problem or in automatic robots. Besides, it may also be expanded by using this technique in dynamic environments.
Acknowledgement
The authors would like to thanks, National Institute of Technology, Rourkela, India for providing such a wonderful facility for research in the Robotics Laboratory.
Financial support
This research received no external funding.
Conflict of Interest statement
The authors do not have any conflict to disclose.
Author’s contribution
Saroj Kumar – Conceptualization, Methodology, Design, Experiment, Drafting.
Dayal R. Parhi – Review, Editing, and Supervision.