



1. Introduction
Surfactants are routinely used in diverse applications involving interfacial or free-surface flows. Well-known examples of such applications include: (a) coating flows (Schunk & Scriven Reference Schunk, Scriven, Kistler and Schweizer1997; Shen et al. Reference Shen, Gleason, McKinley and Stone2002), (b) flow through porous media as in enhanced oil recovery where they are used to help mobilize or displace oil that is trapped in the pores of crude-oil-containing rock formations (Ahmadi, Galedarzadeh & Shadizadeh Reference Ahmadi, Galedarzadeh and Shadizadeh2015; Negin, Ali & Xie Reference Negin, Ali and Xie2017), (c) treatment of respiratory distress syndrome where surfactants are injected into the lungs to enable inflation of alveoli and prevent them from collapsing (Notter Reference Notter2000; Zasadzinski et al. Reference Zasadzinski, Ding, Warriner, Bringezu and Waring2001), (d) crop spraying where surfactants facilitate spreading of agricultural chemicals on the leaves of plants (Zhang & Basaran Reference Zhang and Basaran1997) but also affect in a complex way the sizes and distributions of sizes of spray drops (Kooij et al. Reference Kooij, Sijs, Denn, Villermaux and Bonn2018) which may lead to increased spray drift or pollution (Hilz & Vermeer Reference Hilz and Vermeer2013) and (e) during drop formation in myriad applications including ink jet printing (Basaran Reference Basaran2002; Basaran, Gao & Bhat Reference Basaran, Gao and Bhat2013; Castrejon-Pita et al. Reference Castrejon-Pita, Baxter, Morgan, Temple, Martin and Hutchings2013). The primary action of surfactants in these flows is attributable to their preferential adsorption onto interfaces and the concomitant lowering of surface tension, and hence capillary pressure, by their presence at interfaces. However, surfactant concentration is often non-uniform at an interface in a free-surface flow because of interfacial area change by compression or expansion due to normal dilatation and tangential stretching, and surfactant transport by convection and diffusion. Gradients in surfactant concentration give rise to gradients in surface tension and hence tangential interfacial – Marangoni – stresses. In addition to the lowering of surface tension – the soluto-capillary effect – and the Marangoni effect, surfactants may also induce surface rheological effects (Berg Reference Berg2010) as surfactant molecules are transported along an interface and give rise to frictional losses as the molecules deform against one another. While the implication of these effects has been investigated in some interfacial flows such as coating flows (Scheid et al. Reference Scheid, Delacotte, Dollet, Rio, Restagno, Van Nierop, Cantat, Langevin and Stone2010, Reference Scheid, Dorbolo, Arriaga and Rio2012), only a handful studies to date have considered the effects of surface rheology on interface pinch-off or breakup (see below). The major goal of this paper is to advance the understanding of the effects of surface viscosities in jet breakup.
While the understanding of the role of the soluto-capillary and Marangoni effects on the breakup of jets of Newtonian fluids is fairly complete (Ambravaneswaran & Basaran Reference Ambravaneswaran and Basaran1999; Craster, Matar & Papageorgiou Reference Craster, Matar and Papageorgiou2002; Timmermans & Lister Reference Timmermans and Lister2002; Liao, Franses & Basaran Reference Liao, Franses and Basaran2006; Xu, Liao & Basaran Reference Xu, Liao and Basaran2007; Roché et al. Reference Roché, Aytouna, Bonn and Kellay2009; de Saint Vincent et al. Reference de Saint Vincent, Petit, Aytouna, Delville, Bonn and Kellay2012; Kovalchuk, Nowak & Simmons Reference Kovalchuk, Nowak and Simmons2016; Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018; Martínez-Calvo et al. Reference Martínez-Calvo, Rivero-Rodríguez, Scheid and Sevilla2020), the understanding of the role of surface viscosities on pinch-off by comparison is in its infancy. The reason for the disparity in the understanding of jet breakup with and without surface rheological effects is due in part to the difficulty in measuring the rheological properties of interfaces in comparison to surface tension. In the absence of surfactants or for clean interfaces, surface tension is a material property that simply depends on the thermodynamic state (Berg Reference Berg2010). In the presence of surfactants, surface tension is lower than that when the interface is clean and is reduced by an amount that depends on the local surfactant concentration. As summarized in a number of review articles and books (Franses, Basaran & Chang Reference Franses, Basaran and Chang1996; Tricot Reference Tricot1997; Berg Reference Berg2010), there now exist numerous robust methods for accurately measuring the surface tension of clean as well as surfactant-laden interfaces.
In the presence of surface rheological effects, the standard framework is to describe the interface as a compressible two-dimensional Newtonian fluid with surface shear and dilatational viscosities obeying the Boussinesq–Scriven equations (Scriven Reference Scriven1960). However, in contrast to measuring surface tension, measurement of material properties of interfaces has proven elusive. For example, Stevenson (Reference Stevenson2005) has catalogued in a review article that, in measurement of surface shear viscosity, researchers have reported values that differ by orders of magnitude. The surface viscosities are typically measured by monitoring the mechanical response of micro-scale probes to interfacial flows. One possible reason for the discrepancies in measurements may be that many methods generate a mixed interfacial flow, with both shear and dilatational components, and the surface shear and dilatational viscosities cannot be unambiguously determined from measurements of a single mixed-type flow (Elfring, Leal & Squires Reference Elfring, Leal and Squires2016). Another complication comes from the fact that the flows induced in different experiments often give rise to surface tension gradients and it is then virtually impossible to separate the contributions of the resulting Marangoni stresses from those due to surface viscosities. Zell et al. (Reference Zell, Nowbahar, Mansard, Leal, Deshmukh, Mecca, Tucker and Squires2014) have shown that a rotational shear flow can be created without inducing Marangoni stresses. However, the situation appears much more complicated and ambiguous in dilatational flows in that they are almost always accompanied by Marangoni stresses (Elfring et al. Reference Elfring, Leal and Squires2016).
Motivated by the need to improve the understanding of the breakup of surfactant-covered jets as well as drops in the presence of surface rheological effects and at the same time develop a simple yet robust method for measuring surface viscosities, we analyse theoretically in this paper the pinch-off dynamics of a jet of an incompressible Newtonian liquid that is surrounded by a passive gas, e.g. air, in the situation in which the liquid–gas interface is covered with a monolayer of insoluble surfactant. One attractive feature of this flow with respect to measurement of surface viscosities is that Marangoni stress can be shown to be subdominant to other stresses and hence is negligible as the jet approaches pinch-off. Despite the wide-ranging practical and fundamental importance of jet and drop breakup (Eggers Reference Eggers1997; Basaran Reference Basaran2002; Eggers & Villermaux Reference Eggers and Villermaux2008; Basaran et al. Reference Basaran, Gao and Bhat2013; Castrejon-Pita et al. Reference Castrejon-Pita, Baxter, Morgan, Temple, Martin and Hutchings2013), surprisingly little work has been done on the problem of pinch-off when surface rheological effects play a role. For example, Ponce-Torres et al. (Reference Ponce-Torres, Montanero, Herrada, Vega and Vega2017) have recently shown that the increase in surfactant accumulation in satellite droplets during drop formation cannot be explained without accounting for surface viscosities. Martínez-Calvo & Sevilla (Reference Martínez-Calvo and Sevilla2018) have shown that surface viscosities have a stabilizing influence on the dynamics in the Rayleigh–Plateau instability of liquid jets covered with a monolayer of insoluble surfactant. Wee et al. (Reference Wee, Wagoner, Kamat and Basaran2020) have analysed the breakup of a surfactant-covered jet undergoing Stokes flow. Since it is now well known that jet breakup when the interface is either clean (Eggers Reference Eggers1993; Lister & Stone Reference Lister and Stone1998; Basaran Reference Basaran2002; Eggers Reference Eggers2005; Castrejón-Pita et al. Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015; Li & Sprittles Reference Li and Sprittles2016) or covered with surfactants but where surface rheological effects are absent (Liao et al. Reference Liao, Franses and Basaran2006; Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018) must asymptotically always involve inertia, a major goal of this paper is to extend the results of Wee et al. (Reference Wee, Wagoner, Kamat and Basaran2020) to situations in which inertia is present.
The paper is organized as follows. Section 2 describes the mathematical formulation of the problem. First, the three-dimensional but axisymmetric (3DA) or two-dimensional (2-D) system of equations, boundary conditions, and initial conditions governing the thinning and pinch-off of a Newtonian jet whose surface is covered with a monolayer of insoluble surfactant is presented. Next, since the jet profile in the vicinity of the pinch-off singularity is expected to be slender, a spatially one-dimensional (1-D) set of slender-jet evolution equations are derived that governs the dynamics of capillary thinning and breakup. In the following section, scaling laws are obtained for jets first in the absence (§ 4.1) and then in the presence (§ 4.2) of surface rheological effects. Self-similar solutions are obtained for the interface shape, surfactant concentration, and fluid velocity where these variables have a scaling form with a power-law dependence on time remaining until pinch-off with universal scaling exponents. The results presented in this section constitute the extension of Eggers’ (Reference Eggers1993) seminal analysis on the ‘universal pinching of 3-D axisymmetric free-surface flow’ to situations where surfactants are present and when surface rheology is either absent or present. In the laboratory, the final Eggers-like inertial–viscous (IV) regime in the presence of surfactants may only be reached after a real jet goes through a number of intermediate scaling regimes. Thus, in § 5, results of 3DA simulations are reported where a real jet transitions between a number of intermediate regimes but ultimately asymptotically tends to the counterpart of Eggers’ IV regime albeit with surface rheological effects accounted for as discussed in § 4.2. The main body of the paper ends in § 6 with concluding remarks and a brief discussion on possible directions for future studies. In a couple of appendices, we also elucidate the consequences of adopting a nonlinear as opposed to a linear constitutive equation for relating surface viscosity to surfactant concentration and analyse the effect of initial conditions on surfactant concentration in capillary thinning of jets. It should be noted that consideration of these latter two topics as well as accounting for inertia and solving the 2-D as well as the 1-D system of equations governing capillary thinning as opposed to only the 1-D slender-jet equations differentiate the present paper from the recent publication by Wee et al. (Reference Wee, Wagoner, Kamat and Basaran2020).
2. Problem formulation
2.1. Mathematical statement and 3DA equations
The system is isothermal and consists of an infinite liquid column or jet of an incompressible Newtonian fluid of constant density  $\rho$ and constant viscosity
$\rho$ and constant viscosity  $\mu$ of unperturbed radius
$\mu$ of unperturbed radius  $R$ that is surrounded by a dynamically passive ambient gas that simply exerts a constant pressure on the jet which is taken here to be the pressure datum. The surface of the jet – the liquid–gas (L–G) interface – is covered with a monolayer of an insoluble surfactant and the surface tension of the L–G interface when it is devoid of surfactant is given by
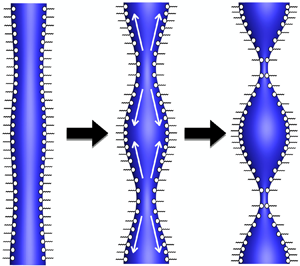
$R$ that is surrounded by a dynamically passive ambient gas that simply exerts a constant pressure on the jet which is taken here to be the pressure datum. The surface of the jet – the liquid–gas (L–G) interface – is covered with a monolayer of an insoluble surfactant and the surface tension of the L–G interface when it is devoid of surfactant is given by  $\sigma _p$ (figure 1). The dynamics is taken to be axisymmetric about the centreline of the initially cylindrical column. Thus, it proves convenient to use a cylindrical coordinate system
$\sigma _p$ (figure 1). The dynamics is taken to be axisymmetric about the centreline of the initially cylindrical column. Thus, it proves convenient to use a cylindrical coordinate system  $(\tilde {r}, \theta , \tilde {z})$ with its origin located along the centreline of the initially cylindrical column and where
$(\tilde {r}, \theta , \tilde {z})$ with its origin located along the centreline of the initially cylindrical column and where  $\tilde {z}$ is the axial coordinate measured along the column's axis,
$\tilde {z}$ is the axial coordinate measured along the column's axis,  $\tilde {r}$ is the radial coordinate measured from that axis and
$\tilde {r}$ is the radial coordinate measured from that axis and  $\theta$ is the usual angle measured around the symmetry axis
$\theta$ is the usual angle measured around the symmetry axis  $\tilde {r} = 0$. When subjected to axisymmetric shape perturbations of infinitesimal amplitude whose wavelength in the axial direction is given by
$\tilde {r} = 0$. When subjected to axisymmetric shape perturbations of infinitesimal amplitude whose wavelength in the axial direction is given by  $\tilde {\lambda }$, a quiescent cylindrical column of liquid undergoes capillary or Rayleigh–Plateau instability if
$\tilde {\lambda }$, a quiescent cylindrical column of liquid undergoes capillary or Rayleigh–Plateau instability if  $\tilde {\lambda }>2{\rm \pi} R$ or
$\tilde {\lambda }>2{\rm \pi} R$ or  $\tilde {k} R < 1$ where
$\tilde {k} R < 1$ where  $\tilde {k} = 2{\rm \pi} / \tilde {\lambda }$ is the wavenumber (Plateau Reference Plateau1873; Rayleigh Reference Rayleigh1878; Michael Reference Michael1981). In this paper, the capillary pinching of a surfactant-covered, quiescent liquid column is initiated by subjecting its surface
$\tilde {k} = 2{\rm \pi} / \tilde {\lambda }$ is the wavenumber (Plateau Reference Plateau1873; Rayleigh Reference Rayleigh1878; Michael Reference Michael1981). In this paper, the capillary pinching of a surfactant-covered, quiescent liquid column is initiated by subjecting its surface  $\tilde {S}(\tilde {t})$, where
$\tilde {S}(\tilde {t})$, where  $\tilde {t}$ is time, at time
$\tilde {t}$ is time, at time  $\tilde {t} = 0$ to a shape perturbation of sufficiently long wavelength but of arbitrary amplitude so that the column's profile is given by
$\tilde {t} = 0$ to a shape perturbation of sufficiently long wavelength but of arbitrary amplitude so that the column's profile is given by
 \begin{equation} \frac{\tilde{r}(\tilde{z}, \tilde{t} = 0)}{R} = \sqrt {1 - \frac {\epsilon ^2}{2}} + \epsilon \cos \tilde{k} \tilde{z} . \end{equation}
\begin{equation} \frac{\tilde{r}(\tilde{z}, \tilde{t} = 0)}{R} = \sqrt {1 - \frac {\epsilon ^2}{2}} + \epsilon \cos \tilde{k} \tilde{z} . \end{equation}
When the disturbance amplitude is small,  $\epsilon \ll 1$, (2.1) simplifies to
$\epsilon \ll 1$, (2.1) simplifies to  $\tilde {r} (\tilde {z}, 0)/R = 1 + \epsilon \cos \tilde {k} \tilde {z}$. Two types of initial conditions are considered for surfactant concentration. In most cases, the jet is taken at
$\tilde {r} (\tilde {z}, 0)/R = 1 + \epsilon \cos \tilde {k} \tilde {z}$. Two types of initial conditions are considered for surfactant concentration. In most cases, the jet is taken at  $\tilde {t} = 0$ to be coated uniformly with surfactant at concentration
$\tilde {t} = 0$ to be coated uniformly with surfactant at concentration  $\tilde {\varGamma }_0$. In some cases, the concentration at the surface of a uniformly coated perfectly cylindrical column is perturbed in an analogous manner as its shape (see below).
$\tilde {\varGamma }_0$. In some cases, the concentration at the surface of a uniformly coated perfectly cylindrical column is perturbed in an analogous manner as its shape (see below).

Figure 1. Definition sketch. (a) A liquid jet the surface  $\tilde {S}(\tilde {t})$ of which is covered by a monolayer of an insoluble surfactant. To initiate capillary thinning and pinch-off, the surface of a perfectly cylindrical column of radius
$\tilde {S}(\tilde {t})$ of which is covered by a monolayer of an insoluble surfactant. To initiate capillary thinning and pinch-off, the surface of a perfectly cylindrical column of radius  $R$ is subjected at time
$R$ is subjected at time  $\tilde {t} = 0$ to an axially periodic sinusoidal perturbation of wavelength
$\tilde {t} = 0$ to an axially periodic sinusoidal perturbation of wavelength  $\tilde {\lambda } = 2{\rm \pi} / \tilde {k}$. (b) Domain of interest for 3DA or 2-D analysis. Here, the interface is parametrized by arc length
$\tilde {\lambda } = 2{\rm \pi} / \tilde {k}$. (b) Domain of interest for 3DA or 2-D analysis. Here, the interface is parametrized by arc length  $\tilde {s}$. (c) The 1-D domain. In both the 2-D and 1-D analyses, the axial extent of the domain is
$\tilde {s}$. (c) The 1-D domain. In both the 2-D and 1-D analyses, the axial extent of the domain is  $0\le z \le \tilde {\lambda }/2 = {\rm \pi}/\tilde {k}$.
$0\le z \le \tilde {\lambda }/2 = {\rm \pi}/\tilde {k}$.
The dynamics of the thinning and breakup of the jet is analysed by solving the transient free boundary problem consisting of the continuity and Navier–Stokes equations for fluid velocity  $\tilde {\boldsymbol {v}}$ and pressure
$\tilde {\boldsymbol {v}}$ and pressure  $\tilde {p}$ within the jet
$\tilde {p}$ within the jet  $\tilde {V}(\tilde {t})$ and the convection–diffusion equation for surfactant concentration
$\tilde {V}(\tilde {t})$ and the convection–diffusion equation for surfactant concentration  $\tilde {\varGamma }$ on
$\tilde {\varGamma }$ on  $\tilde {S}(\tilde {t})$:
$\tilde {S}(\tilde {t})$:
 \begin{gather} \tilde{\boldsymbol{\nabla}} \boldsymbol{\cdot} \tilde{\boldsymbol{v}}=0 \quad \text{in}\ \tilde{V}(\tilde{t}), \end{gather}
\begin{gather} \tilde{\boldsymbol{\nabla}} \boldsymbol{\cdot} \tilde{\boldsymbol{v}}=0 \quad \text{in}\ \tilde{V}(\tilde{t}), \end{gather} \begin{gather} \rho \left(\frac{\partial \tilde{\boldsymbol{v}}}{\partial \tilde{t}}+(\tilde{\boldsymbol{v}} \boldsymbol{\cdot} \tilde{\boldsymbol{\nabla}}) \tilde{\boldsymbol{v}} \right) = \tilde{\boldsymbol{\nabla}} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} \quad \text{in}\ \tilde{V}(\tilde{t}),} \end{gather}
\begin{gather} \rho \left(\frac{\partial \tilde{\boldsymbol{v}}}{\partial \tilde{t}}+(\tilde{\boldsymbol{v}} \boldsymbol{\cdot} \tilde{\boldsymbol{\nabla}}) \tilde{\boldsymbol{v}} \right) = \tilde{\boldsymbol{\nabla}} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} \quad \text{in}\ \tilde{V}(\tilde{t}),} \end{gather} \begin{gather} \frac{\partial \tilde{\varGamma}}{\partial \tilde{t}} +\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \left(\tilde{\varGamma} \tilde{\boldsymbol{v}} \right) = D_s\tilde{\boldsymbol{\nabla}}_s^2\tilde{\varGamma} \quad {\text{on }} \tilde{S}(\tilde{t}). \end{gather}
\begin{gather} \frac{\partial \tilde{\varGamma}}{\partial \tilde{t}} +\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \left(\tilde{\varGamma} \tilde{\boldsymbol{v}} \right) = D_s\tilde{\boldsymbol{\nabla}}_s^2\tilde{\varGamma} \quad {\text{on }} \tilde{S}(\tilde{t}). \end{gather}
In (2.3),  $\tilde {\boldsymbol{\mathsf{T}} } = -\tilde {p} \boldsymbol{\mathsf{I}} + \mu [ \tilde {\boldsymbol {\nabla }} \tilde {\boldsymbol {v}}+(\tilde {\boldsymbol {\nabla }} \tilde {\boldsymbol {v}})^T]$ is the total stress tensor for a Newtonian fluid and
$\tilde {\boldsymbol{\mathsf{T}} } = -\tilde {p} \boldsymbol{\mathsf{I}} + \mu [ \tilde {\boldsymbol {\nabla }} \tilde {\boldsymbol {v}}+(\tilde {\boldsymbol {\nabla }} \tilde {\boldsymbol {v}})^T]$ is the total stress tensor for a Newtonian fluid and  $\boldsymbol{\mathsf{I}} $ is the identity tensor. In (2.4),
$\boldsymbol{\mathsf{I}} $ is the identity tensor. In (2.4),  $D_s$ is the surfactant diffusivity,
$D_s$ is the surfactant diffusivity,  $\tilde {\boldsymbol {\nabla }}_s \equiv \boldsymbol{\mathsf{I}} ^s \boldsymbol {\cdot } \tilde {\boldsymbol {\nabla }}$ is the surface gradient operator and
$\tilde {\boldsymbol {\nabla }}_s \equiv \boldsymbol{\mathsf{I}} ^s \boldsymbol {\cdot } \tilde {\boldsymbol {\nabla }}$ is the surface gradient operator and  $\boldsymbol{\mathsf{I}} ^s \equiv \boldsymbol{\mathsf{I}} -\boldsymbol {n}\boldsymbol {n}$ is the surface identity tensor with
$\boldsymbol{\mathsf{I}} ^s \equiv \boldsymbol{\mathsf{I}} -\boldsymbol {n}\boldsymbol {n}$ is the surface identity tensor with  $\boldsymbol {n}$ denoting the outward pointing unit normal to
$\boldsymbol {n}$ denoting the outward pointing unit normal to  $\tilde {S}(\tilde {t})$.
$\tilde {S}(\tilde {t})$.
As (2.2) and (2.3) are balances of mass and momentum conservation in the bulk  $\tilde {V}(\tilde {t})$, the corresponding principles of mass and momentum conservation at the L–G interface
$\tilde {V}(\tilde {t})$, the corresponding principles of mass and momentum conservation at the L–G interface  $\tilde {S}(\tilde {t})$ are the kinematic and traction boundary conditions (Scriven Reference Scriven1960; Aris Reference Aris2012). In the absence of bulk flow or mass transfer across the interface, the kinematic boundary condition is given by
$\tilde {S}(\tilde {t})$ are the kinematic and traction boundary conditions (Scriven Reference Scriven1960; Aris Reference Aris2012). In the absence of bulk flow or mass transfer across the interface, the kinematic boundary condition is given by
 \begin{equation} \boldsymbol{n} \boldsymbol{\cdot} \left( \tilde{\boldsymbol{v}} - \tilde{\boldsymbol{v}}_s \right) = 0, \end{equation}
\begin{equation} \boldsymbol{n} \boldsymbol{\cdot} \left( \tilde{\boldsymbol{v}} - \tilde{\boldsymbol{v}}_s \right) = 0, \end{equation}
where  $\tilde {\boldsymbol {v}}_s$ is the velocity of points on the interface. If the surface of the jet is described as a compressible, two-dimensional Newtonian fluid, surface rheological effects that arise over and beyond the ordinary capillary and Marangoni stress effects obey the Boussinesq–Scriven constitutive equation (Scriven Reference Scriven1960). Then the traction or the stress-balance boundary condition at the free surface is given by
$\tilde {\boldsymbol {v}}_s$ is the velocity of points on the interface. If the surface of the jet is described as a compressible, two-dimensional Newtonian fluid, surface rheological effects that arise over and beyond the ordinary capillary and Marangoni stress effects obey the Boussinesq–Scriven constitutive equation (Scriven Reference Scriven1960). Then the traction or the stress-balance boundary condition at the free surface is given by
 \begin{align} \boldsymbol{n} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} } &= 2\tilde{\mathcal{H}}\tilde{\sigma}\boldsymbol{n} + \tilde{\boldsymbol{\nabla}}_s\tilde{\sigma} + 2\tilde{\mathcal{H}} \left(\mu_d - \mu_s \right)\left(\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \tilde{\boldsymbol{v}}\right)\boldsymbol{n}\nonumber\\ &\quad + \tilde{\boldsymbol{\nabla}}_s\left[\left(\mu_d-\mu_s\right)\left(\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \tilde{\boldsymbol{v}}\right)\right] +\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \left[\mu_s\left(\tilde{\boldsymbol{\nabla}}_s\tilde{\boldsymbol{v}} \boldsymbol{\cdot} \boldsymbol{\mathsf{I}} ^s + \boldsymbol{\mathsf{I}} ^s \boldsymbol{\cdot} \left(\tilde{\boldsymbol{\nabla}}_s\tilde{\boldsymbol{v}} \right)^T\right)\right]. \end{align}
\begin{align} \boldsymbol{n} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} } &= 2\tilde{\mathcal{H}}\tilde{\sigma}\boldsymbol{n} + \tilde{\boldsymbol{\nabla}}_s\tilde{\sigma} + 2\tilde{\mathcal{H}} \left(\mu_d - \mu_s \right)\left(\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \tilde{\boldsymbol{v}}\right)\boldsymbol{n}\nonumber\\ &\quad + \tilde{\boldsymbol{\nabla}}_s\left[\left(\mu_d-\mu_s\right)\left(\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \tilde{\boldsymbol{v}}\right)\right] +\tilde{\boldsymbol{\nabla}}_s \boldsymbol{\cdot} \left[\mu_s\left(\tilde{\boldsymbol{\nabla}}_s\tilde{\boldsymbol{v}} \boldsymbol{\cdot} \boldsymbol{\mathsf{I}} ^s + \boldsymbol{\mathsf{I}} ^s \boldsymbol{\cdot} \left(\tilde{\boldsymbol{\nabla}}_s\tilde{\boldsymbol{v}} \right)^T\right)\right]. \end{align}
Here,  $2\tilde {\mathcal {H}} \equiv -\tilde {\boldsymbol {\nabla }} \boldsymbol {\cdot } \boldsymbol {n}$ is twice mean curvature of the free surface. The first two terms on the right-hand side of (2.6) correspond to the capillary pressure and the Marangoni stress due to surface tension gradients. The remaining terms account for surface rheological effects. Surface tension
$2\tilde {\mathcal {H}} \equiv -\tilde {\boldsymbol {\nabla }} \boldsymbol {\cdot } \boldsymbol {n}$ is twice mean curvature of the free surface. The first two terms on the right-hand side of (2.6) correspond to the capillary pressure and the Marangoni stress due to surface tension gradients. The remaining terms account for surface rheological effects. Surface tension  $\tilde {\sigma } = \tilde {\sigma } (\tilde {\varGamma })$ as well as the surface shear
$\tilde {\sigma } = \tilde {\sigma } (\tilde {\varGamma })$ as well as the surface shear  $\mu _s = \mu _s (\tilde {\varGamma })$ and the surface dilatational
$\mu _s = \mu _s (\tilde {\varGamma })$ and the surface dilatational  $\mu _d = \mu _d (\tilde {\varGamma })$ viscosities are all functions of surfactant concentration
$\mu _d = \mu _d (\tilde {\varGamma })$ viscosities are all functions of surfactant concentration  $\tilde {\varGamma }$ (see below).
$\tilde {\varGamma }$ (see below).
Here, surface tension  $\tilde {\sigma }$ is related to surfactant concentration
$\tilde {\sigma }$ is related to surfactant concentration  $\tilde {\varGamma }$ via the Szyszkowski equation of state (Liao et al. Reference Liao, Franses and Basaran2006)
$\tilde {\varGamma }$ via the Szyszkowski equation of state (Liao et al. Reference Liao, Franses and Basaran2006)
 \begin{equation} \tilde{\sigma} = \sigma_p + \tilde{\varGamma}_m R_g T \ln \left(1-\frac{\tilde{\varGamma}}{\tilde{\varGamma}_m} \right) , \end{equation}
\begin{equation} \tilde{\sigma} = \sigma_p + \tilde{\varGamma}_m R_g T \ln \left(1-\frac{\tilde{\varGamma}}{\tilde{\varGamma}_m} \right) , \end{equation}
where  $\tilde {\varGamma }_m$ is the maximum packing density of surfactant,
$\tilde {\varGamma }_m$ is the maximum packing density of surfactant,  $R_g$ is the gas constant and
$R_g$ is the gas constant and  $T$ is the absolute temperature. It will be shown below that the particular equation of state adopted to relate surface tension to surfactant concentration is immaterial as the pinch-off singularity is approached.
$T$ is the absolute temperature. It will be shown below that the particular equation of state adopted to relate surface tension to surfactant concentration is immaterial as the pinch-off singularity is approached.
Since surface rheological effects arise when surfactants deform against themselves at interfaces, it accords with intuition that surface viscosities are functions of  $\tilde {\varGamma }$. Although it is not known whether the functional form of
$\tilde {\varGamma }$. Although it is not known whether the functional form of  $\mu _d(\tilde {\varGamma })$ is identical to that of
$\mu _d(\tilde {\varGamma })$ is identical to that of  $\mu _s(\tilde {\varGamma })$, the simplifying assumption is adopted in this paper that
$\mu _s(\tilde {\varGamma })$, the simplifying assumption is adopted in this paper that  $\mu _d$ varies with
$\mu _d$ varies with  $\tilde {\varGamma }$ in the same way as
$\tilde {\varGamma }$ in the same way as  $\mu _s$. Throughout the body of the paper, following recent works in the literature (Ponce-Torres et al. Reference Ponce-Torres, Montanero, Herrada, Vega and Vega2017), the surface viscosities are taken to vary linearly with
$\mu _s$. Throughout the body of the paper, following recent works in the literature (Ponce-Torres et al. Reference Ponce-Torres, Montanero, Herrada, Vega and Vega2017), the surface viscosities are taken to vary linearly with  $\tilde {\varGamma }$ with respect to a reference state
$\tilde {\varGamma }$ with respect to a reference state
 \begin{equation} \mu_s=\mu_{sr} \tilde{\varGamma}/\tilde{\varGamma}_r, \quad \mu_d=\mu_{dr} \tilde{\varGamma}/\tilde{\varGamma}_r, \end{equation}
\begin{equation} \mu_s=\mu_{sr} \tilde{\varGamma}/\tilde{\varGamma}_r, \quad \mu_d=\mu_{dr} \tilde{\varGamma}/\tilde{\varGamma}_r, \end{equation}
where  $\mu _{sr}$ and
$\mu _{sr}$ and  $\mu _{dr}$ are the reference surface viscosities at the reference surfactant concentration
$\mu _{dr}$ are the reference surface viscosities at the reference surfactant concentration  $\tilde {\varGamma }_r$. As shown in appendix A, some of the key results presented in this paper can be readily generalized so that they are independent of the constitutive equation used to relate surface viscosities to surfactant concentration.
$\tilde {\varGamma }_r$. As shown in appendix A, some of the key results presented in this paper can be readily generalized so that they are independent of the constitutive equation used to relate surface viscosities to surfactant concentration.
Because the dynamics is axisymmetric about the  $\tilde {z}$-axis, the shear stress and the radial velocity have to vanish at
$\tilde {z}$-axis, the shear stress and the radial velocity have to vanish at  $\tilde {r} = 0$, viz.
$\tilde {r} = 0$, viz.  $\boldsymbol {e}_r \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_z = 0$ and
$\boldsymbol {e}_r \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_z = 0$ and  $\tilde {u} \equiv \tilde {\boldsymbol {v}} \boldsymbol {\cdot } \boldsymbol {e}_r = 0$ where
$\tilde {u} \equiv \tilde {\boldsymbol {v}} \boldsymbol {\cdot } \boldsymbol {e}_r = 0$ where  $\boldsymbol {e}_r$ and
$\boldsymbol {e}_r$ and  $\boldsymbol {e}_z$ stand for the unit vectors in the radial and axial directions. On account of the periodicity of the imposed initial perturbation of the jet's surface, the problem only needs to be solved over an axial distance equal to one half of the wavelength of the imposed perturbation. Thus, along the two symmetry planes located at
$\boldsymbol {e}_z$ stand for the unit vectors in the radial and axial directions. On account of the periodicity of the imposed initial perturbation of the jet's surface, the problem only needs to be solved over an axial distance equal to one half of the wavelength of the imposed perturbation. Thus, along the two symmetry planes located at  $\tilde {z}=0$ and
$\tilde {z}=0$ and  $\tilde {z}={\rm \pi} /\tilde {k} = \tilde {\lambda }/2$, both the shear stress and the axial velocity must vanish, viz.
$\tilde {z}={\rm \pi} /\tilde {k} = \tilde {\lambda }/2$, both the shear stress and the axial velocity must vanish, viz.  $\boldsymbol {e}_z \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_r = 0$ and
$\boldsymbol {e}_z \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_r = 0$ and  $\tilde {v} \equiv \tilde {\boldsymbol {v}} \boldsymbol {\cdot } \boldsymbol {e}_z = 0$. Also because of symmetry, surfactant concentration must obey
$\tilde {v} \equiv \tilde {\boldsymbol {v}} \boldsymbol {\cdot } \boldsymbol {e}_z = 0$. Also because of symmetry, surfactant concentration must obey  $\boldsymbol {e}_z \boldsymbol {\cdot } \tilde {\boldsymbol {\nabla }}_s\tilde {\varGamma } = 0$ at
$\boldsymbol {e}_z \boldsymbol {\cdot } \tilde {\boldsymbol {\nabla }}_s\tilde {\varGamma } = 0$ at  $\tilde {z}=0$ and
$\tilde {z}=0$ and  $\tilde {z}={\rm \pi} /\tilde {k}$.
$\tilde {z}={\rm \pi} /\tilde {k}$.
2.2. The 1-D slender-jet equations
Since the jet radius is small relative to the length of the jet, a set of 1-D slender-jet or long-wavelength equations can be derived to analyse the dynamics of jet breakup. Thus, in this limit, both the axial velocity and the pressure to leading order are simply functions of the axial coordinate and time, viz.  $\tilde {v}=\tilde {v}(\tilde {z},\tilde {t})$ and
$\tilde {v}=\tilde {v}(\tilde {z},\tilde {t})$ and  $\tilde {p}=\tilde {p}(\tilde {z},\tilde {t})$. From (2.2), it then follows that the radial velocity is small or to leading order of
$\tilde {p}=\tilde {p}(\tilde {z},\tilde {t})$. From (2.2), it then follows that the radial velocity is small or to leading order of  $O(\tilde {r})$, and is given by
$O(\tilde {r})$, and is given by  $\tilde {u}(\tilde {r},\tilde {z},\tilde {t}) = -(\tilde {r}/2) \partial \tilde {v}/ \partial \tilde {z}$.
$\tilde {u}(\tilde {r},\tilde {z},\tilde {t}) = -(\tilde {r}/2) \partial \tilde {v}/ \partial \tilde {z}$.
If the free-surface shape is represented as  $\tilde {r}=\tilde {h}(\tilde {z},\tilde {t})$ (figure 1), substitution of the leading-order expressions for
$\tilde {r}=\tilde {h}(\tilde {z},\tilde {t})$ (figure 1), substitution of the leading-order expressions for  $\tilde {u}$ and
$\tilde {u}$ and  $\tilde {v}$ into (2.5) leads to the 1-D mass balance or the kinematic boundary condition (KBC) that governs the transient evolution of the jet radius
$\tilde {v}$ into (2.5) leads to the 1-D mass balance or the kinematic boundary condition (KBC) that governs the transient evolution of the jet radius
 \begin{equation} \frac{\partial \tilde{h}}{\partial \tilde{t}}+\tilde{v}\frac{\partial \tilde{h}}{\partial \tilde{z}}+\frac{\tilde{h}}{2}\frac{\partial \tilde{v}}{\partial \tilde{z}}=0. \end{equation}
\begin{equation} \frac{\partial \tilde{h}}{\partial \tilde{t}}+\tilde{v}\frac{\partial \tilde{h}}{\partial \tilde{z}}+\frac{\tilde{h}}{2}\frac{\partial \tilde{v}}{\partial \tilde{z}}=0. \end{equation}Similarly, the 1-D convection–diffusion equation can be obtained from (2.4) (Ambravaneswaran & Basaran Reference Ambravaneswaran and Basaran1999) that governs the transient evolution of the surfactant concentration
 \begin{equation} \frac{\partial \tilde{\varGamma}}{\partial \tilde{t}} + \tilde{v} \frac{\partial \tilde{\varGamma}}{\partial \tilde{z}} + \frac{\tilde{\varGamma}}{2}\frac{\partial \tilde{v}}{\partial \tilde{z}}-\frac{D_s}{\tilde{h}}\frac{\partial }{\partial \tilde{z}}\left(\tilde{h}\frac{\partial \tilde{\varGamma}}{\partial \tilde{z}}\right)=0. \end{equation}
\begin{equation} \frac{\partial \tilde{\varGamma}}{\partial \tilde{t}} + \tilde{v} \frac{\partial \tilde{\varGamma}}{\partial \tilde{z}} + \frac{\tilde{\varGamma}}{2}\frac{\partial \tilde{v}}{\partial \tilde{z}}-\frac{D_s}{\tilde{h}}\frac{\partial }{\partial \tilde{z}}\left(\tilde{h}\frac{\partial \tilde{\varGamma}}{\partial \tilde{z}}\right)=0. \end{equation} To derive the 1-D momentum balance, a slightly different approach is adopted here than the one used by Eggers (Reference Eggers1993) for jets with clean interfaces and Martínez-Calvo & Sevilla (Reference Martínez-Calvo and Sevilla2018) for surfactant-covered jets. The analysis is expedited by noting that the various components of the stress tensor are given by  $\tilde{\mathsf {T} }_{rr} \equiv \boldsymbol {e}_r \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_r$,
$\tilde{\mathsf {T} }_{rr} \equiv \boldsymbol {e}_r \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_r$,  $\tilde{\mathsf {T} }_{rz} \equiv \boldsymbol {e}_r \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_z$, and
$\tilde{\mathsf {T} }_{rz} \equiv \boldsymbol {e}_r \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_z$, and  $\tilde{\mathsf {T} }_{zz} \equiv \boldsymbol {e}_z \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_z$. Although it is clear that the normal stresses
$\tilde{\mathsf {T} }_{zz} \equiv \boldsymbol {e}_z \boldsymbol {\cdot } \tilde {\boldsymbol{\mathsf{T}}} \boldsymbol {\cdot } \boldsymbol {e}_z$. Although it is clear that the normal stresses  $\tilde{\mathsf {T} }_{zz}$ and
$\tilde{\mathsf {T} }_{zz}$ and  $\tilde{\mathsf {T} }_{rr}$ are uniform over the cross-section of the jet for a Newtonian fluid because
$\tilde{\mathsf {T} }_{rr}$ are uniform over the cross-section of the jet for a Newtonian fluid because  $\tilde{\mathsf {T} }_{zz} = - \tilde {p} + 2\mu (\partial \tilde {v}/ \partial \tilde {z})$ and
$\tilde{\mathsf {T} }_{zz} = - \tilde {p} + 2\mu (\partial \tilde {v}/ \partial \tilde {z})$ and  $\tilde{\mathsf {T} }_{rr} = - \tilde {p} + 2\mu (\partial \tilde {u}/ \partial \tilde {r}) = - \tilde {p} - \mu (\partial \tilde {v}/ \partial \tilde {z})$, most of the following derivations can be generalized to situations where the stress tensor is arbitrary, e.g. when the fluid is viscoelastic, by assuming that the normal stresses are uniform in the cross-sectional plane (see, e.g. Bird, Armstrong & Hassager Reference Bird, Armstrong and Hassager1987) regardless of the constitutive equation used to describe the fluid's rheology. In general, without assuming that the jet is Newtonian, it is straightforward to show that at the L–G interface,
$\tilde{\mathsf {T} }_{rr} = - \tilde {p} + 2\mu (\partial \tilde {u}/ \partial \tilde {r}) = - \tilde {p} - \mu (\partial \tilde {v}/ \partial \tilde {z})$, most of the following derivations can be generalized to situations where the stress tensor is arbitrary, e.g. when the fluid is viscoelastic, by assuming that the normal stresses are uniform in the cross-sectional plane (see, e.g. Bird, Armstrong & Hassager Reference Bird, Armstrong and Hassager1987) regardless of the constitutive equation used to describe the fluid's rheology. In general, without assuming that the jet is Newtonian, it is straightforward to show that at the L–G interface,
 \begin{equation} \boldsymbol{n} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} } \boldsymbol{\cdot} \boldsymbol{n} = \frac {1}{1 + (\partial \tilde{h}/\partial \tilde{z})^2 } \left \{ \tilde{\mathsf {T} }_{rr} - 2 \frac {\partial \tilde{h}}{\partial \tilde{z}} \tilde{\mathsf {T} }_{rz} + \left ( \frac {\partial \tilde{h}}{\partial \tilde{z}} \right )^2 \tilde{\mathsf {T} }_{zz} \right \} \end{equation}
\begin{equation} \boldsymbol{n} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} } \boldsymbol{\cdot} \boldsymbol{n} = \frac {1}{1 + (\partial \tilde{h}/\partial \tilde{z})^2 } \left \{ \tilde{\mathsf {T} }_{rr} - 2 \frac {\partial \tilde{h}}{\partial \tilde{z}} \tilde{\mathsf {T} }_{rz} + \left ( \frac {\partial \tilde{h}}{\partial \tilde{z}} \right )^2 \tilde{\mathsf {T} }_{zz} \right \} \end{equation}and
 \begin{equation} \boldsymbol{n} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} } \boldsymbol{\cdot} \boldsymbol{t} = \frac {1}{1 + (\partial \tilde{h}/\partial \tilde{z})^2 } \left \{ \frac {\partial \tilde{h}}{\partial \tilde{z}} \left (\tilde{\mathsf {T} }_{rr} - \tilde{\mathsf {T} }_{zz} \right ) + \left [ 1 - \left ( \frac {\partial \tilde{h}}{\partial \tilde{z}} \right )^2 \right ] \tilde{\mathsf {T} }_{rz} \right \}, \end{equation}
\begin{equation} \boldsymbol{n} \boldsymbol{\cdot} \tilde{\boldsymbol{\mathsf{T}} } \boldsymbol{\cdot} \boldsymbol{t} = \frac {1}{1 + (\partial \tilde{h}/\partial \tilde{z})^2 } \left \{ \frac {\partial \tilde{h}}{\partial \tilde{z}} \left (\tilde{\mathsf {T} }_{rr} - \tilde{\mathsf {T} }_{zz} \right ) + \left [ 1 - \left ( \frac {\partial \tilde{h}}{\partial \tilde{z}} \right )^2 \right ] \tilde{\mathsf {T} }_{rz} \right \}, \end{equation}
where  $\boldsymbol {t}$ is the unit tangent to the free surface.
$\boldsymbol {t}$ is the unit tangent to the free surface.
Taking the dot or inner product of (2.6) with  $\boldsymbol {n}$, using (2.11) and keeping the highest-order contributions leads to
$\boldsymbol {n}$, using (2.11) and keeping the highest-order contributions leads to
 \begin{equation} \tilde{\mathsf {T} }_{rr}\rvert_{\tilde{r}=\tilde{h}(\tilde{z},\tilde{t})}=2\tilde{\mathcal{H}}\tilde{\sigma} + \frac{1}{2\tilde{h}}\frac{\partial \tilde{v}}{\partial \tilde{z}}(3\mu_s-\mu_d). \end{equation}
\begin{equation} \tilde{\mathsf {T} }_{rr}\rvert_{\tilde{r}=\tilde{h}(\tilde{z},\tilde{t})}=2\tilde{\mathcal{H}}\tilde{\sigma} + \frac{1}{2\tilde{h}}\frac{\partial \tilde{v}}{\partial \tilde{z}}(3\mu_s-\mu_d). \end{equation}
Here, following Eggers (Reference Eggers1993), the expression for the full curvature is retained in the capillary pressure term. As  $\tilde{\mathsf {T} }_{rr}$ does not vary with
$\tilde{\mathsf {T} }_{rr}$ does not vary with  $\tilde {r}$, the expression (2.13) gives the radial normal stress throughout the cross-section of the jet. Taking the inner product of (2.6) with
$\tilde {r}$, the expression (2.13) gives the radial normal stress throughout the cross-section of the jet. Taking the inner product of (2.6) with  $\boldsymbol {t}$, using (2.12) and keeping the highest-order contributions leads to
$\boldsymbol {t}$, using (2.12) and keeping the highest-order contributions leads to
 \begin{equation} \tilde{\mathsf {T} }_{rz}\rvert_{\tilde{r}=\tilde{h}(\tilde{z},\tilde{t})}=\frac{\partial \tilde{h}}{\partial \tilde{z}}\left(\tilde{\mathsf {T} }_{zz}-\tilde{\mathsf {T} }_{rr}\right) + \frac{\partial \tilde{\sigma}}{\partial \tilde{z}} + \frac{\partial }{\partial \tilde{z}}\left(\frac{3\mu_s+\mu_d}{2}\frac{\partial \tilde{v}}{\partial \tilde{z}}\right)+\frac{3\mu_s}{\tilde{h}}\frac{\partial \tilde{h}}{\partial \tilde{z}}\frac{\partial \tilde{v}}{\partial \tilde{z}}. \end{equation}
\begin{equation} \tilde{\mathsf {T} }_{rz}\rvert_{\tilde{r}=\tilde{h}(\tilde{z},\tilde{t})}=\frac{\partial \tilde{h}}{\partial \tilde{z}}\left(\tilde{\mathsf {T} }_{zz}-\tilde{\mathsf {T} }_{rr}\right) + \frac{\partial \tilde{\sigma}}{\partial \tilde{z}} + \frac{\partial }{\partial \tilde{z}}\left(\frac{3\mu_s+\mu_d}{2}\frac{\partial \tilde{v}}{\partial \tilde{z}}\right)+\frac{3\mu_s}{\tilde{h}}\frac{\partial \tilde{h}}{\partial \tilde{z}}\frac{\partial \tilde{v}}{\partial \tilde{z}}. \end{equation}
It is worth noting that, while  $\tilde {v}$,
$\tilde {v}$,  $\tilde{\mathsf {T} }_{rr}$ and
$\tilde{\mathsf {T} }_{rr}$ and  $\tilde{\mathsf {T} }_{zz}$ do not vary with
$\tilde{\mathsf {T} }_{zz}$ do not vary with  $\tilde {r}$,
$\tilde {r}$,  $\tilde{\mathsf {T} }_{rz}$ is a function of
$\tilde{\mathsf {T} }_{rz}$ is a function of  $\tilde {r}$; it vanishes at
$\tilde {r}$; it vanishes at  $\tilde {r}=0$ because of axisymmetry and takes on the value given by (2.14) at the L–G interface.
$\tilde {r}=0$ because of axisymmetry and takes on the value given by (2.14) at the L–G interface.
Now that expressions have been obtained to leading order for all components of the stress tensor, the 1-D force balance or the momentum equation can be derived. Multiplying the  $\tilde {z}$-component of (2.3) at leading order by
$\tilde {z}$-component of (2.3) at leading order by  $\tilde {r}$ and integrating over the cross-section of the jet yields
$\tilde {r}$ and integrating over the cross-section of the jet yields
 \begin{equation} \rho \left( \frac{\partial \tilde{v}}{\partial \tilde{t}} + \tilde{v}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right) = \frac{2}{\tilde{h}}\tilde{\mathsf {T} }_{rz}\rvert_{\tilde{r}=\tilde{h}(\tilde{z},\tilde{t})} + \frac{\partial \tilde{\mathsf {T} }_{zz}}{\partial \tilde{z}}. \end{equation}
\begin{equation} \rho \left( \frac{\partial \tilde{v}}{\partial \tilde{t}} + \tilde{v}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right) = \frac{2}{\tilde{h}}\tilde{\mathsf {T} }_{rz}\rvert_{\tilde{r}=\tilde{h}(\tilde{z},\tilde{t})} + \frac{\partial \tilde{\mathsf {T} }_{zz}}{\partial \tilde{z}}. \end{equation}Equation (2.15) is valid irrespective of the rheology of the jet fluid. When ((2.13)–(2.14)) are substituted into (2.15), the 1-D momentum equation for a surfactant-covered jet is obtained
 \begin{align} \rho \left( \frac{\partial \tilde{v}}{\partial \tilde{t}}+\tilde{v}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right) &= \frac{\partial}{\partial \tilde{z}}\left(2\tilde{\mathcal{H}}\tilde{\sigma}\right) + \frac{2}{\tilde{h}}\frac{\partial \tilde{\sigma}}{\partial \tilde{z}} + \frac{1}{\tilde{h}^2}\frac{\partial}{\partial \tilde{z}}\left[\tilde{h}^2 (\tilde{\mathsf {T} }_{zz} - \tilde{\mathsf {T} }_{rr}) \right] \nonumber\\ &\quad+ \frac{1}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}}\left (\mu_d \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ) + \frac{9}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}} \left ( \mu_s \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ). \end{align}
\begin{align} \rho \left( \frac{\partial \tilde{v}}{\partial \tilde{t}}+\tilde{v}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right) &= \frac{\partial}{\partial \tilde{z}}\left(2\tilde{\mathcal{H}}\tilde{\sigma}\right) + \frac{2}{\tilde{h}}\frac{\partial \tilde{\sigma}}{\partial \tilde{z}} + \frac{1}{\tilde{h}^2}\frac{\partial}{\partial \tilde{z}}\left[\tilde{h}^2 (\tilde{\mathsf {T} }_{zz} - \tilde{\mathsf {T} }_{rr}) \right] \nonumber\\ &\quad+ \frac{1}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}}\left (\mu_d \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ) + \frac{9}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}} \left ( \mu_s \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ). \end{align}
For a Newtonian fluid,  $\tilde{\mathsf {T} }_{zz} - \tilde{\mathsf {T} }_{rr} = 3 \mu (\partial \tilde {v}/\partial \tilde {z})$ and the previous equation can be rewritten as
$\tilde{\mathsf {T} }_{zz} - \tilde{\mathsf {T} }_{rr} = 3 \mu (\partial \tilde {v}/\partial \tilde {z})$ and the previous equation can be rewritten as
 \begin{align} \rho \left( \frac{\partial \tilde{v}}{\partial \tilde{t}}+\tilde{v}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right) &= \frac{\partial}{\partial \tilde{z}}\left(2\tilde{\mathcal{H}}\tilde{\sigma}\right) + \frac{2}{\tilde{h}}\frac{\partial \tilde{\sigma}}{\partial \tilde{z}} + \frac{3\mu}{\tilde{h}^2}\frac{\partial}{\partial \tilde{z}}\left(\tilde{h}^2\frac{\partial \tilde{v}}{\partial \tilde{z}}\right) \nonumber\\ &\quad + \frac{1}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}} \left ( \mu_d \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ) + \frac{9}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}} \left ( \mu_s \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ) . \end{align}
\begin{align} \rho \left( \frac{\partial \tilde{v}}{\partial \tilde{t}}+\tilde{v}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right) &= \frac{\partial}{\partial \tilde{z}}\left(2\tilde{\mathcal{H}}\tilde{\sigma}\right) + \frac{2}{\tilde{h}}\frac{\partial \tilde{\sigma}}{\partial \tilde{z}} + \frac{3\mu}{\tilde{h}^2}\frac{\partial}{\partial \tilde{z}}\left(\tilde{h}^2\frac{\partial \tilde{v}}{\partial \tilde{z}}\right) \nonumber\\ &\quad + \frac{1}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}} \left ( \mu_d \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ) + \frac{9}{2\tilde{h}^2}\frac{\partial}{\partial \tilde{z}} \left ( \mu_s \tilde{h}\frac{\partial \tilde{v}}{\partial \tilde{z}} \right ) . \end{align}
The various terms in the 1-D force balance correspond to inertial force, capillary force, Marangoni force, bulk viscous force and surface viscous forces associated with surface dilatation and shear deformation, respectively. It is noteworthy that in the slender-jet model, surface shear and dilatational viscous forces take on the same mathematical forms. Thus, we set  $\mu _d=\mu _s$ for the sake of simplicity and only use
$\mu _d=\mu _s$ for the sake of simplicity and only use  $\mu _s$ in the rest of the paper.
$\mu _s$ in the rest of the paper.
As the 3DA equations, the slender-jet equations too are solved over half a wavelength of the imposed perturbation. In this limit, the boundary conditions on the dependent variables reduce to  $\partial \tilde {h}/\partial \tilde {z}=0$,
$\partial \tilde {h}/\partial \tilde {z}=0$,  $\partial \tilde {\varGamma }/ \partial \tilde {z}=0$ and
$\partial \tilde {\varGamma }/ \partial \tilde {z}=0$ and  $\tilde {v}=0$ at
$\tilde {v}=0$ at  $\tilde {z}=0$ and
$\tilde {z}=0$ and  $\tilde {z}={\rm \pi} /\tilde {k}=\tilde {\lambda } / 2$.
$\tilde {z}={\rm \pi} /\tilde {k}=\tilde {\lambda } / 2$.
3. Numerical and analytical solution methods
3.1. The 3DA simulations
The transient system of 3DA or 2-D ((2.2)–(2.4)) is solved numerically by means of a fully implicit, arbitrary Lagrangian–Eulerian method-of-lines (MOL) algorithm in which the Galerkin finite element method (G/FEM) is used for spatial discretization (Basaran Reference Basaran1992; Feng & Basaran Reference Feng and Basaran1994; Gresho & Sani Reference Gresho and Sani1998; Gockenbach Reference Gockenbach2006) and an adaptive, implicit finite difference method is employed for time integration (Gresho, Lee & Sani Reference Gresho, Lee and Sani1980; Patzek et al. Reference Patzek, Benner, Basaran and Scriven1991; Wilkes & Basaran Reference Wilkes and Basaran2001; Gockenbach Reference Gockenbach2006). As jet breakup is a free boundary problem that involves a highly deformable L–G interface, an elliptic mesh generation technique (Christodoulou & Scriven Reference Christodoulou and Scriven1992) is employed to track the moving boundary and determine the radial and axial coordinates of each grid point in the moving, adaptive mesh simultaneously with the velocity and pressure unknowns in the jet as well as the free-surface profile and surfactant concentration along the interface. In the 3DA algorithm, the interface is parametrized in terms of arc length  $\tilde{s}$ (see, e.g. Notz & Basaran (Reference Notz and Basaran2004) and figure 1). This parametrization, as opposed to using one where the interface shape is a single-valued function of the axial coordinate, coupled to the elliptic mesh generation algorithm allows simulation of the jet dynamics in which the interface may overturn (Notz & Basaran Reference Notz and Basaran2004). At each time step, the resulting system of nonlinear algebraic equations is solved iteratively using Newton's method where the Jacobian is computed analytically. Similar versions of the algorithm have already been used to analyse the breakup of jets, drops and filaments with and without surfactants (Notz & Basaran Reference Notz and Basaran2004; Liao et al. Reference Liao, Franses and Basaran2006; Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018; Anthony et al. Reference Anthony, Kamat, Harris and Basaran2019; Anthony, Harris & Basaran Reference Anthony, Harris and Basaran2020).
$\tilde{s}$ (see, e.g. Notz & Basaran (Reference Notz and Basaran2004) and figure 1). This parametrization, as opposed to using one where the interface shape is a single-valued function of the axial coordinate, coupled to the elliptic mesh generation algorithm allows simulation of the jet dynamics in which the interface may overturn (Notz & Basaran Reference Notz and Basaran2004). At each time step, the resulting system of nonlinear algebraic equations is solved iteratively using Newton's method where the Jacobian is computed analytically. Similar versions of the algorithm have already been used to analyse the breakup of jets, drops and filaments with and without surfactants (Notz & Basaran Reference Notz and Basaran2004; Liao et al. Reference Liao, Franses and Basaran2006; Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018; Anthony et al. Reference Anthony, Kamat, Harris and Basaran2019; Anthony, Harris & Basaran Reference Anthony, Harris and Basaran2020).
3.2. The 1-D simulations
The system of 1-D slender-jet equations ((2.9), (2.10), (2.17)) is solved numerically using a fully implicit MOL algorithm. The algorithm is based on the use of the G/FEM for spatial discretization and the same adaptive, implicit finite difference method as in the 3DA algorithm described above for time integration. Similar versions of this algorithm have already been used to solve 1-D evolution equations in analysing the breakup of liquid bridges and jets with and without surfactants and the dripping of leaky faucets (Zhang, Padgett & Basaran Reference Zhang, Padgett and Basaran1996; Ambravaneswaran & Basaran Reference Ambravaneswaran and Basaran1999; Ambravaneswaran, Phillips & Basaran Reference Ambravaneswaran, Phillips and Basaran2000; Ambravaneswaran, Wilkes & Basaran Reference Ambravaneswaran, Wilkes and Basaran2002; Ambravaneswaran et al. Reference Ambravaneswaran, Subramani, Phillips and Basaran2004; Liao et al. Reference Liao, Franses and Basaran2006; Subramani et al. Reference Subramani, Yeoh, Suryo, Xu, Ambravaneswaran and Basaran2006; Wee et al. Reference Wee, Wagoner, Kamat and Basaran2020).
3.3. Similarity solutions
In the vicinity of the space–time pinch-off singularity, similarity solutions can be constructed to the slender-jet equations. Such analyses are presented in the next section (§ 4). Solutions of the slender-jet equations that are obtained from simulations (§ 3.2) are used together with analyses carried out in similarity space to obtain in § 4 insights into pinch-off of jets in the absence and presence of surface rheological effects. Results of these analyses are then compared in § 5 with ones obtained from full 3DA simulations.
4. The 1-D results: similarity solutions and simulations
4.1. Pinch-off without surface rheological effects
In the absence of surfactants, Eggers (Reference Eggers1993) has shown that as pinch-off is approached, jets with clean interfaces asymptotically thin according to
 \begin{equation} \frac{\tilde{h}_{min}}{l_{\mu}} = 0.0304\frac{\tilde{\tau}}{t_{\mu}}, \end{equation}
\begin{equation} \frac{\tilde{h}_{min}}{l_{\mu}} = 0.0304\frac{\tilde{\tau}}{t_{\mu}}, \end{equation}
where  $\tilde {\tau } \equiv \tilde {t}_b-\tilde {t}$ is time until pinch-off, and
$\tilde {\tau } \equiv \tilde {t}_b-\tilde {t}$ is time until pinch-off, and  $\tilde {t}_b$ is the time at which pinch-off occurs. In the so-called IV scaling law given in (4.1),
$\tilde {t}_b$ is the time at which pinch-off occurs. In the so-called IV scaling law given in (4.1),  $\tilde {h}_{min}$ and
$\tilde {h}_{min}$ and  $\tilde {\tau }$ are measured in units of or are normalized with the viscous length
$\tilde {\tau }$ are measured in units of or are normalized with the viscous length  $l_{\mu } \equiv {\mu ^2}/{\rho \sigma _p}$ and the viscous time
$l_{\mu } \equiv {\mu ^2}/{\rho \sigma _p}$ and the viscous time  $t_{\mu } \equiv {\mu ^3}/{\rho \sigma _p^2}$, respectively (Eggers Reference Eggers1993; Castrejón-Pita et al. Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015). These characteristic scales in (4.1) are intimately tied to the dynamical balance between the three forces at play: capillary (surface tension), inertia and bulk viscous forces. In this case, the power-law exponent of unity that determines how the minimum radius scales with time measured from pinch-off, viz.
$t_{\mu } \equiv {\mu ^3}/{\rho \sigma _p^2}$, respectively (Eggers Reference Eggers1993; Castrejón-Pita et al. Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015). These characteristic scales in (4.1) are intimately tied to the dynamical balance between the three forces at play: capillary (surface tension), inertia and bulk viscous forces. In this case, the power-law exponent of unity that determines how the minimum radius scales with time measured from pinch-off, viz.  $\tilde {h}_{min} \sim \tilde {\tau }$, and the amplitude of 0.0304 in the non-dimensional scaling law in (4.1), are universal, or observed irrespective of the experiment performed (Eggers Reference Eggers1993). Remarkably, when surfactants are present but surface rheological effects are neglected and diffusion is weak, the exact same balance of forces is observed to hold (Timmermans & Lister Reference Timmermans and Lister2002; Liao et al. Reference Liao, Franses and Basaran2006; McGough & Basaran Reference McGough and Basaran2006; Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018) and it has been shown computationally by Liao et al. (Reference Liao, Franses and Basaran2006), Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) and McGough & Basaran (Reference McGough and Basaran2006) that (4.1) still describes the thinning of a surfactant-covered jet. To date, however, no self-similar analysis predicting this thinning rate has been carried out nor has an expression analogous to (4.1) for surfactant concentration been proposed. In the next few paragraphs, we provide these analyses in both the absence and presence of surface rheological effects.
$\tilde {h}_{min} \sim \tilde {\tau }$, and the amplitude of 0.0304 in the non-dimensional scaling law in (4.1), are universal, or observed irrespective of the experiment performed (Eggers Reference Eggers1993). Remarkably, when surfactants are present but surface rheological effects are neglected and diffusion is weak, the exact same balance of forces is observed to hold (Timmermans & Lister Reference Timmermans and Lister2002; Liao et al. Reference Liao, Franses and Basaran2006; McGough & Basaran Reference McGough and Basaran2006; Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018) and it has been shown computationally by Liao et al. (Reference Liao, Franses and Basaran2006), Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) and McGough & Basaran (Reference McGough and Basaran2006) that (4.1) still describes the thinning of a surfactant-covered jet. To date, however, no self-similar analysis predicting this thinning rate has been carried out nor has an expression analogous to (4.1) for surfactant concentration been proposed. In the next few paragraphs, we provide these analyses in both the absence and presence of surface rheological effects.
In what follows, we use  $l_{\mu }$,
$l_{\mu }$,  $t_{\mu }$ and
$t_{\mu }$ and  $\varGamma _p \equiv \sigma _p/R_g T$ as characteristic length, time and surfactant concentration scales to non-dimensionalize the problem. The characteristic velocity is then given by
$\varGamma _p \equiv \sigma _p/R_g T$ as characteristic length, time and surfactant concentration scales to non-dimensionalize the problem. The characteristic velocity is then given by  $l _{\mu }/t_{\mu } \equiv \sigma _p/\mu$, the visco-capillary velocity. Henceforward, a variable without a tilde represents the dimensionless counterpart of a variable with a tilde, e.g.
$l _{\mu }/t_{\mu } \equiv \sigma _p/\mu$, the visco-capillary velocity. Henceforward, a variable without a tilde represents the dimensionless counterpart of a variable with a tilde, e.g.  $\tilde {h}_{min}$ is dimensional but
$\tilde {h}_{min}$ is dimensional but  $h_{min}\equiv \tilde {h}_{min}/l_{\mu }$ is dimensionless. Following Eggers (Reference Eggers1993), we introduce the following (dimensionless) self-similar ansatz that the jet radius
$h_{min}\equiv \tilde {h}_{min}/l_{\mu }$ is dimensionless. Following Eggers (Reference Eggers1993), we introduce the following (dimensionless) self-similar ansatz that the jet radius  $h \equiv \tilde {h}/l_{\mu }$, axial velocity
$h \equiv \tilde {h}/l_{\mu }$, axial velocity  $v \equiv \tilde {v}/(\sigma _p/\mu )$ and surfactant concentration
$v \equiv \tilde {v}/(\sigma _p/\mu )$ and surfactant concentration  $\varGamma \equiv \tilde {\varGamma } / \varGamma _p$ have scaling forms given by
$\varGamma \equiv \tilde {\varGamma } / \varGamma _p$ have scaling forms given by
 \begin{equation} \left. \begin{gathered} h(z,t)=\tau^{\alpha_h}H(\xi) , \quad v(z,t)=\tau^{\alpha_v}V(\xi),\\ \varGamma(z,t)=\tau^{\alpha_{\varGamma}}G(\xi), \quad \xi\equiv (z-z_b)/\tau^{\alpha_z}, \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} h(z,t)=\tau^{\alpha_h}H(\xi) , \quad v(z,t)=\tau^{\alpha_v}V(\xi),\\ \varGamma(z,t)=\tau^{\alpha_{\varGamma}}G(\xi), \quad \xi\equiv (z-z_b)/\tau^{\alpha_z}, \end{gathered} \right\} \end{equation}
where  $\xi$ is the similarity variable,
$\xi$ is the similarity variable,  $z_b$ is the axial location where the jet will pinch off,
$z_b$ is the axial location where the jet will pinch off,  $\alpha _h$,
$\alpha _h$,  $\alpha _v$,
$\alpha _v$,  $\alpha _{\varGamma }$ and
$\alpha _{\varGamma }$ and  $\alpha _z$ are scaling exponents and
$\alpha _z$ are scaling exponents and  $H$,
$H$,  $V$ and
$V$ and  $G$ are scaling functions. These relations are then substituted into the governing 1-D equations ((2.9), (2.10), and (2.17)) resulting in a set of ordinary differential equations (ODEs). By requiring that the ODEs in similarity space cannot depend on
$G$ are scaling functions. These relations are then substituted into the governing 1-D equations ((2.9), (2.10), and (2.17)) resulting in a set of ordinary differential equations (ODEs). By requiring that the ODEs in similarity space cannot depend on  $\tau$ and using physical arguments, the scaling exponents can be deduced. The rates of jet thinning and surfactant depletion are then readily obtained by determination of the similarity functions to leading order.
$\tau$ and using physical arguments, the scaling exponents can be deduced. The rates of jet thinning and surfactant depletion are then readily obtained by determination of the similarity functions to leading order.
When the 1-D convection–diffusion equation (2.10) is non-dimensionalized using the aforementioned scales, a single dimensionless group, the Péclet number  $Pe$, emerges from the analysis
$Pe$, emerges from the analysis
 \begin{equation} Pe \equiv \frac {(\sigma_p/\mu) l_{\mu}}{D_s} = \frac {\mu}{\rho D_s} . \end{equation}
\begin{equation} Pe \equiv \frac {(\sigma_p/\mu) l_{\mu}}{D_s} = \frac {\mu}{\rho D_s} . \end{equation}
If the solvent is water,  $Pe \approx 10^3$ for common surfactants (Liao et al. Reference Liao, Franses and Basaran2006). For glycerol–water mixtures, the value of the Péclet number would yet be larger and range as
$Pe \approx 10^3$ for common surfactants (Liao et al. Reference Liao, Franses and Basaran2006). For glycerol–water mixtures, the value of the Péclet number would yet be larger and range as  $10^3<Pe<10^6$ (Liao et al. Reference Liao, Franses and Basaran2006). Therefore, we let
$10^3<Pe<10^6$ (Liao et al. Reference Liao, Franses and Basaran2006). Therefore, we let  $Pe \to \infty$ in the remainder of this section. We note that in this limit, the 1-D mass balance equation (2.9) for
$Pe \to \infty$ in the remainder of this section. We note that in this limit, the 1-D mass balance equation (2.9) for  $\tilde {h}$ and the 1-D convection–diffusion equation (2.10) for
$\tilde {h}$ and the 1-D convection–diffusion equation (2.10) for  $\tilde {\varGamma }$ become identical.
$\tilde {\varGamma }$ become identical.
4.1.1. Determination of scaling exponents
The analysis when the interface is covered with surfactant is made more complicated than when the interface is clean by the presence of the Marangoni stress ( $(2/h)({\partial \sigma }/{\partial z})$) and the nonlinearity of the Szyszkowski equation of state. Progress toward solving this problem is expedited by making the simple realization that the relationship between surfactant concentration
$(2/h)({\partial \sigma }/{\partial z})$) and the nonlinearity of the Szyszkowski equation of state. Progress toward solving this problem is expedited by making the simple realization that the relationship between surfactant concentration  $\varGamma$ and surface tension
$\varGamma$ and surface tension  $\sigma$ is greatly simplified as breakup is approached. When the 1-D mass balance equation (or KBC) and the 1-D convection–diffusion equation (for
$\sigma$ is greatly simplified as breakup is approached. When the 1-D mass balance equation (or KBC) and the 1-D convection–diffusion equation (for  $Pe \to \infty$), which are both spatially 1-D transient partial differential equations (PDEs), are cast onto similarity space, the requirement that the resulting ODEs be independent of
$Pe \to \infty$), which are both spatially 1-D transient partial differential equations (PDEs), are cast onto similarity space, the requirement that the resulting ODEs be independent of  $\tau$ reveals from each of these equations that
$\tau$ reveals from each of these equations that  $\alpha _v = \alpha _z -1$. With the use of this result, the 1-D mass balance equation and the 1-D convection–diffusion equation can be rewritten as
$\alpha _v = \alpha _z -1$. With the use of this result, the 1-D mass balance equation and the 1-D convection–diffusion equation can be rewritten as
 \begin{gather} \frac{H'}{H} = -\frac{(1/2)V'-\alpha_h}{V+\alpha_z\xi}, \end{gather}
\begin{gather} \frac{H'}{H} = -\frac{(1/2)V'-\alpha_h}{V+\alpha_z\xi}, \end{gather} \begin{gather} \frac{G'}{G} = -\frac{(1/2)V'-\alpha_{\varGamma}}{V+\alpha_z\xi}, \end{gather}
\begin{gather} \frac{G'}{G} = -\frac{(1/2)V'-\alpha_{\varGamma}}{V+\alpha_z\xi}, \end{gather}
where prime denotes differentiation with respect to  $\xi$. As a consequence of the boundedness of
$\xi$. As a consequence of the boundedness of  $V(\xi )$, there exists a point
$V(\xi )$, there exists a point  $\xi _0$ where the denominator on the right-hand sides of (4.4) and (4.5) vanish (Eggers Reference Eggers1993; Papageorgiou Reference Papageorgiou1995). To ensure that the scaling function for the interface shape
$\xi _0$ where the denominator on the right-hand sides of (4.4) and (4.5) vanish (Eggers Reference Eggers1993; Papageorgiou Reference Papageorgiou1995). To ensure that the scaling function for the interface shape  $H(\xi )$ and that for concentration
$H(\xi )$ and that for concentration  $G(\xi )$ are well behaved, the numerators on the right-hand sides of these equations must also vanish at
$G(\xi )$ are well behaved, the numerators on the right-hand sides of these equations must also vanish at  $\xi _0$, revealing that
$\xi _0$, revealing that  $(1/2)V'(\xi _0) = \alpha _h = \alpha _{\varGamma }$. Physically speaking, this regularity condition implies that, as pinch-off is approached (
$(1/2)V'(\xi _0) = \alpha _h = \alpha _{\varGamma }$. Physically speaking, this regularity condition implies that, as pinch-off is approached ( $\tau \to 0$) and the radius of the jet tends to zero (
$\tau \to 0$) and the radius of the jet tends to zero ( $\alpha _h>0$), surfactant concentration must also tend to zero – a realization that accords with intuition in the limit of
$\alpha _h>0$), surfactant concentration must also tend to zero – a realization that accords with intuition in the limit of  $Pe \to \infty$. Moreover, this fact allows the Szyszkowski equation of state to be linearized so that
$Pe \to \infty$. Moreover, this fact allows the Szyszkowski equation of state to be linearized so that  $\sigma = 1-\varGamma$ as
$\sigma = 1-\varGamma$ as  $\tau \to 0$.
$\tau \to 0$.
Now that it has been shown that  $\alpha _h = \alpha _{\varGamma }$ and that
$\alpha _h = \alpha _{\varGamma }$ and that  $\alpha _v = \alpha _z-1$, two scaling exponents, say
$\alpha _v = \alpha _z-1$, two scaling exponents, say  $\alpha _h$ and
$\alpha _h$ and  $\alpha _z$, still remain unknown but can be uniquely determined by considering the dominant balance of forces in the momentum equation. When (4.2) is used in (2.17) (with the terms involving surface viscosity omitted), the latter can be written as
$\alpha _z$, still remain unknown but can be uniquely determined by considering the dominant balance of forces in the momentum equation. When (4.2) is used in (2.17) (with the terms involving surface viscosity omitted), the latter can be written as
 \begin{equation} \alpha_z \xi V'+VV'-\alpha_vV = \frac{\tau^{2-2\alpha_z-\alpha_h}}{H^2}\left[H' - \tau^{\alpha_h}(HG)'+3\tau^{\alpha_h-1}(H^2V')'\right]. \end{equation}
\begin{equation} \alpha_z \xi V'+VV'-\alpha_vV = \frac{\tau^{2-2\alpha_z-\alpha_h}}{H^2}\left[H' - \tau^{\alpha_h}(HG)'+3\tau^{\alpha_h-1}(H^2V')'\right]. \end{equation}
The left-hand side of (4.6) consists of the inertial terms. The terms on the right-hand side account for the capillary, Marangoni and bulk viscous forces, respectively. Using the physical requirement that the thread radius must decrease as pinch-off is approached ( $\alpha _h>0$), comparison of the Marangoni force with either capillary force or bulk viscous force immediately reveals that Marangoni force cannot enter the asymptotic dominant balance of forces. Balancing capillary and bulk viscous forces or requiring that the exponent of
$\alpha _h>0$), comparison of the Marangoni force with either capillary force or bulk viscous force immediately reveals that Marangoni force cannot enter the asymptotic dominant balance of forces. Balancing capillary and bulk viscous forces or requiring that the exponent of  $\tau$ in the bulk viscous term vanish leads to
$\tau$ in the bulk viscous term vanish leads to  $\alpha _h = 1$. The requirement that the ODE in similarity space be independent of
$\alpha _h = 1$. The requirement that the ODE in similarity space be independent of  $\tau$ or that capillary and bulk viscous forces balance inertia as
$\tau$ or that capillary and bulk viscous forces balance inertia as  $\tau \to 0$ then reveals that
$\tau \to 0$ then reveals that  $\alpha _z = 1/2$. Therefore, in summary, the dominant balance of forces is that between inertial, capillary and bulk viscous forces as thread radius tends to zero and the scaling exponents are given by
$\alpha _z = 1/2$. Therefore, in summary, the dominant balance of forces is that between inertial, capillary and bulk viscous forces as thread radius tends to zero and the scaling exponents are given by  $\alpha _h = \alpha _{\varGamma }=1$,
$\alpha _h = \alpha _{\varGamma }=1$,  $\alpha _z=1/2$ and
$\alpha _z=1/2$ and  $\alpha _v=-1/2$. Recognition of the asymptotic insignificance of Marangoni stress and use of the scaling exponents that have just been determined then permits the set of ODEs governing the three scaling functions
$\alpha _v=-1/2$. Recognition of the asymptotic insignificance of Marangoni stress and use of the scaling exponents that have just been determined then permits the set of ODEs governing the three scaling functions  $H$,
$H$,  $G$, and
$G$, and  $V$ in similarity space to be rewritten as
$V$ in similarity space to be rewritten as
 \begin{gather} \frac{H'}{H} = \frac{2-V'}{2V+\xi}, \end{gather}
\begin{gather} \frac{H'}{H} = \frac{2-V'}{2V+\xi}, \end{gather} \begin{gather} \frac{G'}{G} = \frac{2-V'}{2V+\xi}, \end{gather}
\begin{gather} \frac{G'}{G} = \frac{2-V'}{2V+\xi}, \end{gather} \begin{gather} \left(V\xi + V^2\right)'H^2 = 2H' + 6(H^2V')'. \end{gather}
\begin{gather} \left(V\xi + V^2\right)'H^2 = 2H' + 6(H^2V')'. \end{gather}
It should be noted that the scaling function  $G$ that enters the expression for the surfactant concentration in (4.2) is decoupled from the momentum equation (4.9) in similarity space. This is a point that will be returned to and further elaborated on below. The physics dictates that the dynamics far from the pinch point must evolve much more slowly than that in vicinity of the singularity. Thus, solutions must be independent of
$G$ that enters the expression for the surfactant concentration in (4.2) is decoupled from the momentum equation (4.9) in similarity space. This is a point that will be returned to and further elaborated on below. The physics dictates that the dynamics far from the pinch point must evolve much more slowly than that in vicinity of the singularity. Thus, solutions must be independent of  $\tau$ as
$\tau$ as  $z-z_b \to \pm \infty$. In similarity space, the far-field conditions on the scaling functions are hence given by
$z-z_b \to \pm \infty$. In similarity space, the far-field conditions on the scaling functions are hence given by
 \begin{gather} V(\xi) \sim \xi^{\alpha_v/\alpha_z}=\xi^{-1}, \end{gather}
\begin{gather} V(\xi) \sim \xi^{\alpha_v/\alpha_z}=\xi^{-1}, \end{gather} \begin{gather}H(\xi) \sim \xi^{\alpha_h/\alpha_z}=\xi^2, \end{gather}
\begin{gather}H(\xi) \sim \xi^{\alpha_h/\alpha_z}=\xi^2, \end{gather} \begin{gather}G(\xi) \sim \xi^{\alpha_{\varGamma}/\alpha_z}=\xi^2, \end{gather}
\begin{gather}G(\xi) \sim \xi^{\alpha_{\varGamma}/\alpha_z}=\xi^2, \end{gather}
as  $\lvert \xi \rvert \to \infty$.
$\lvert \xi \rvert \to \infty$.
4.1.2. Determination of thinning rate
Now that the scaling exponents, the system of ODEs governing the scaling functions in similarity space, and the boundary conditions on the scaling functions have been established, the rate of thinning of the jet can be determined. To accomplish this goal, first the scaling functions are expressed in terms of a power series in  $\xi$ about the point
$\xi$ about the point  $\xi _0$,
$\xi _0$,
 \begin{equation} H(\xi) = \sum_{k=0}^{\infty} H_{k}(\xi-\xi_0)^{k} , \quad V(\xi) = \sum_{k=0}^{\infty} V_{k}(\xi-\xi_0)^{k} , \quad G(\xi) = \sum_{k=0}^{\infty} G_{k}(\xi-\xi_0)^{k} , \end{equation}
\begin{equation} H(\xi) = \sum_{k=0}^{\infty} H_{k}(\xi-\xi_0)^{k} , \quad V(\xi) = \sum_{k=0}^{\infty} V_{k}(\xi-\xi_0)^{k} , \quad G(\xi) = \sum_{k=0}^{\infty} G_{k}(\xi-\xi_0)^{k} , \end{equation}
and these series expansions are substituted into ((4.7)–(4.9)). The regularity condition,  $V'(\xi _0)=2$, allows the coefficients in the series expansions to be expressed in terms of recurrence relations
$V'(\xi _0)=2$, allows the coefficients in the series expansions to be expressed in terms of recurrence relations
 \begin{equation} \begin{bmatrix} k(12H_0+1) & k(k+1)(3H_0^2) & 0 \\ 5k & H_0(k+1) & 0 \\ 0 & G_0(k+1) & 5k \end{bmatrix} \begin{bmatrix} H_{k} \\ V_{k+1} \\G_{k} \end{bmatrix} = \begin{bmatrix} f_1(H_{k-1},V_{k}) \\ f_2(H_{k-1},V_{k}) \\f_3(V_{k},G_{k-1}) \end{bmatrix} . \end{equation}
\begin{equation} \begin{bmatrix} k(12H_0+1) & k(k+1)(3H_0^2) & 0 \\ 5k & H_0(k+1) & 0 \\ 0 & G_0(k+1) & 5k \end{bmatrix} \begin{bmatrix} H_{k} \\ V_{k+1} \\G_{k} \end{bmatrix} = \begin{bmatrix} f_1(H_{k-1},V_{k}) \\ f_2(H_{k-1},V_{k}) \\f_3(V_{k},G_{k-1}) \end{bmatrix} . \end{equation}
The terms on the right-hand side,  $f_1$,
$f_1$,  $f_2$ and
$f_2$ and  $f_3$, depend on lower-order coefficients. The presence of zeros in the first two rows of the third column of the coefficient matrix in (4.14) is noteworthy and further demonstrates that the surfactant problem is decoupled from the other two equations as a result of the insignificance of Marangoni stress near pinch-off. Therefore, the similarity equations and far-field conditions for the scaling functions for the velocity and jet profile are identical in the presence and absence of surfactants. Hence, the rate of thinning of a surfactant-covered jet is expected to be the same as that in Eggers’ case where the surface of the jet is clean or devoid of surfactant. Alternatively, one can proceed along the following lines presented below to determine the thinning rate. In order for a solution of these recurrence relations to exist, the determinant of the coefficient matrix must be non-zero for all
$f_3$, depend on lower-order coefficients. The presence of zeros in the first two rows of the third column of the coefficient matrix in (4.14) is noteworthy and further demonstrates that the surfactant problem is decoupled from the other two equations as a result of the insignificance of Marangoni stress near pinch-off. Therefore, the similarity equations and far-field conditions for the scaling functions for the velocity and jet profile are identical in the presence and absence of surfactants. Hence, the rate of thinning of a surfactant-covered jet is expected to be the same as that in Eggers’ case where the surface of the jet is clean or devoid of surfactant. Alternatively, one can proceed along the following lines presented below to determine the thinning rate. In order for a solution of these recurrence relations to exist, the determinant of the coefficient matrix must be non-zero for all  $k$. While it is obvious from the governing equations, it is easy to see that the determinant vanishes independent of
$k$. While it is obvious from the governing equations, it is easy to see that the determinant vanishes independent of  $G_0$ at values of
$G_0$ at values of  $H_0$ given by
$H_0$ given by
 \begin{equation} H^{sin}_0(n)=\frac{1}{(15n-12)}, \quad n=1,2,3,\ldots . \end{equation}
\begin{equation} H^{sin}_0(n)=\frac{1}{(15n-12)}, \quad n=1,2,3,\ldots . \end{equation}
Although no similarity solution exists when  $n=1,2,3,\ldots$, Brenner, Lister & Stone (Reference Brenner, Lister and Stone1996) in the absence of surfactants and Liao et al. (Reference Liao, Franses and Basaran2006), McGough & Basaran (Reference McGough and Basaran2006) and Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) in the absence of surface rheological effects have shown that the computed rate of thinning
$n=1,2,3,\ldots$, Brenner, Lister & Stone (Reference Brenner, Lister and Stone1996) in the absence of surfactants and Liao et al. (Reference Liao, Franses and Basaran2006), McGough & Basaran (Reference McGough and Basaran2006) and Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) in the absence of surface rheological effects have shown that the computed rate of thinning  $0.0304$ differs by less than a half of a per cent from
$0.0304$ differs by less than a half of a per cent from  $H^{sin}_0(3)=0.\overline {03}$. That this is indeed the case is demonstrated once again in figure 2 which shows results obtained from a 1-D simulation of the variation with time remaining until breakup
$H^{sin}_0(3)=0.\overline {03}$. That this is indeed the case is demonstrated once again in figure 2 which shows results obtained from a 1-D simulation of the variation with time remaining until breakup  $\tau$ of the thread's minimum radius
$\tau$ of the thread's minimum radius  $h_{min}$, the axial length scale
$h_{min}$, the axial length scale  $z' \equiv z_{\varLambda h_{min}}-z_{min}$ where
$z' \equiv z_{\varLambda h_{min}}-z_{min}$ where  $1< \varLambda < 1.2$ and
$1< \varLambda < 1.2$ and  $z_{min}$ and
$z_{min}$ and  $z_{\varLambda h_{min}}$ stand for the axial location where the jet radius is a minimum and that where the jet radius equals
$z_{\varLambda h_{min}}$ stand for the axial location where the jet radius is a minimum and that where the jet radius equals  $\varLambda$ times
$\varLambda$ times  $h_{min}$, respectively, the axial velocity scale
$h_{min}$, respectively, the axial velocity scale  $v' \equiv v_{\varLambda h_{min}}$ which is the value of the axial velocity evaluated at the axial location where the jet radius equals
$v' \equiv v_{\varLambda h_{min}}$ which is the value of the axial velocity evaluated at the axial location where the jet radius equals  $\varLambda h_{min}$ and surfactant concentration where the thread's radius is a minimum
$\varLambda h_{min}$ and surfactant concentration where the thread's radius is a minimum  $\varGamma _{min} \equiv \varGamma |_{h_{min}}$ in the absence of surface rheological effects. (We note that the scaling of the axial length can equivalently be determined from the scaling of the planar curvature.) Figure 2 makes plain that all dynamical variables – thread radius or radial length scale, axial length scale, axial velocity and surfactant concentration – exhibit the scaling behaviour that is discussed above and where it is shown that these variables have power-law dependencies on
$\varGamma _{min} \equiv \varGamma |_{h_{min}}$ in the absence of surface rheological effects. (We note that the scaling of the axial length can equivalently be determined from the scaling of the planar curvature.) Figure 2 makes plain that all dynamical variables – thread radius or radial length scale, axial length scale, axial velocity and surfactant concentration – exhibit the scaling behaviour that is discussed above and where it is shown that these variables have power-law dependencies on  $\tau$ with the power-law or scaling exponents of 1, 1/2,
$\tau$ with the power-law or scaling exponents of 1, 1/2,  $-1/2$ and 1, respectively.
$-1/2$ and 1, respectively.

Figure 2. Transient evolution of minimum jet radius and surfactant concentration at that location and axial length and axial velocity predicted from 1-D simulations. Computed variation with  $\tau$ of
$\tau$ of  $h_{min}$ (green square
$h_{min}$ (green square  $\square$ symbols),
$\square$ symbols),  $z' \equiv z_{1.04h_{min}}-z_{min}$ (orange diamond
$z' \equiv z_{1.04h_{min}}-z_{min}$ (orange diamond  $\diamond$ symbols),
$\diamond$ symbols),  $v' \equiv v_{1.04h_{min}}$ (red circle
$v' \equiv v_{1.04h_{min}}$ (red circle  $\circ$ symbols) and
$\circ$ symbols) and  $\varGamma _{min} \equiv \varGamma |_{h_{min}}$ (blue triangle
$\varGamma _{min} \equiv \varGamma |_{h_{min}}$ (blue triangle  $\triangle$ symbols) for a jet of
$\triangle$ symbols) for a jet of  $Pe=\infty$,
$Pe=\infty$,  $\varGamma _m = 0.3$ and
$\varGamma _m = 0.3$ and  $\varGamma _0=0.15$ in the absence of surface rheological effects. The solid black lines that are superimposed on the simulation results for
$\varGamma _0=0.15$ in the absence of surface rheological effects. The solid black lines that are superimposed on the simulation results for  $h_{min}$,
$h_{min}$,  $z'$ and
$z'$ and  $v'$ as
$v'$ as  $\tau \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. The pink dotted line, with the indicated slope of one, is Eggers’ solution,
$\tau \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. The pink dotted line, with the indicated slope of one, is Eggers’ solution,  $h_{min}=0.0304\tau$, for either a jet with a clean interface (Eggers Reference Eggers1993) or a surfactant-covered jet without surface rheological effects (this paper).
$h_{min}=0.0304\tau$, for either a jet with a clean interface (Eggers Reference Eggers1993) or a surfactant-covered jet without surface rheological effects (this paper).
4.1.3. Determination of surfactant depletion rate
While the analysis involving the recurrence relation presented in the previous subsection has resulted in the determination of  $H_0$, which in turn has made it possible to predict from theory the variation of
$H_0$, which in turn has made it possible to predict from theory the variation of  $h_{min}$ with
$h_{min}$ with  $\tau$, that analysis has neither led to the value of
$\tau$, that analysis has neither led to the value of  $G_0$ nor determined how
$G_0$ nor determined how  $\varGamma _{min}$ varies with
$\varGamma _{min}$ varies with  $\tau$. Moreover, the universality and/or validity of (4.1) irrespective of the initial conditions that have been imposed have not yet been demonstrated. Progress towards this goal is made by recognizing that if
$\tau$. Moreover, the universality and/or validity of (4.1) irrespective of the initial conditions that have been imposed have not yet been demonstrated. Progress towards this goal is made by recognizing that if  $H(\xi )$ and
$H(\xi )$ and  $V(\xi )$ are solutions to (4.7) and (4.9), then
$V(\xi )$ are solutions to (4.7) and (4.9), then  $G(\xi )=c_0 H(\xi )$, where
$G(\xi )=c_0 H(\xi )$, where  $c_0$ is a constant, is a solution to (4.8). While the value of
$c_0$ is a constant, is a solution to (4.8). While the value of  $c_0$ cannot be determined by scrutinizing the governing ODEs in similarity space, an examination of the transient PDEs in physical space reveals that because the 1-D mass balance equation and the 1-D convection–diffusion equation are identical in form,
$c_0$ cannot be determined by scrutinizing the governing ODEs in similarity space, an examination of the transient PDEs in physical space reveals that because the 1-D mass balance equation and the 1-D convection–diffusion equation are identical in form,  $c_0={\varGamma _0}/{h_0}$ where
$c_0={\varGamma _0}/{h_0}$ where  $h_0=h_{min}(z_{min},t=0) \equiv h_{min}(L,0)$ (figure 1) and
$h_0=h_{min}(z_{min},t=0) \equiv h_{min}(L,0)$ (figure 1) and  $\varGamma _0=\varGamma |_{h_0}$ (see appendix B). Figure 3(a) shows that (4.1) clearly describes the asymptotic variation of
$\varGamma _0=\varGamma |_{h_0}$ (see appendix B). Figure 3(a) shows that (4.1) clearly describes the asymptotic variation of  $h_{min}$ with
$h_{min}$ with  $\tau$ irrespective of the initial conditions but the variation of
$\tau$ irrespective of the initial conditions but the variation of  $\varGamma _{min}$ with
$\varGamma _{min}$ with  $\tau$ (figure 3b) clearly depends on
$\tau$ (figure 3b) clearly depends on  $\varGamma _0$ and
$\varGamma _0$ and  $h_0$. Moreover, by using the fact that
$h_0$. Moreover, by using the fact that  $c_0={\varGamma _0}/{h_0}$, the variation of
$c_0={\varGamma _0}/{h_0}$, the variation of  $\varGamma _{min}$ with
$\varGamma _{min}$ with  $\tau$ can be collapsed onto a single line given by
$\tau$ can be collapsed onto a single line given by  $\varGamma ^*_{min} \equiv \varGamma _{min}/c_0 = 0.0304\tau$ as shown in the inset to figure 3(b).
$\varGamma ^*_{min} \equiv \varGamma _{min}/c_0 = 0.0304\tau$ as shown in the inset to figure 3(b).

Figure 3. The 1-D simulation results of the computed variation with  $\tau$ of (a)
$\tau$ of (a)  $h_{min}$ and (b)
$h_{min}$ and (b)  $\varGamma _{min}$ for jets of
$\varGamma _{min}$ for jets of  $Pe=\infty$ and
$Pe=\infty$ and  $\varGamma _m = 0.3$ in the absence of surface rheological effects that are subjected to different initial conditions. The pink dotted line in (a) is that for which
$\varGamma _m = 0.3$ in the absence of surface rheological effects that are subjected to different initial conditions. The pink dotted line in (a) is that for which  $h_{min}=0.0304\tau$. All simulation data for
$h_{min}=0.0304\tau$. All simulation data for  $h_{min}$ versus
$h_{min}$ versus  $\tau$ eventually collapse onto this line (Eggers’ scaling law) irrespective of the initial conditions. By contrast, simulation data for
$\tau$ eventually collapse onto this line (Eggers’ scaling law) irrespective of the initial conditions. By contrast, simulation data for  $\varGamma _{min}$ versus
$\varGamma _{min}$ versus  $\tau$ do not collapse onto a single line, which clearly illustrates that the evolution in time of
$\tau$ do not collapse onto a single line, which clearly illustrates that the evolution in time of  $\varGamma _{min}$ is dependent on initial conditions. Inset to figure 3(b) shows rescaled
$\varGamma _{min}$ is dependent on initial conditions. Inset to figure 3(b) shows rescaled  $\varGamma _{min}$, viz.
$\varGamma _{min}$, viz.  $\varGamma _{min}^* \equiv \varGamma _{min}/c_0$, where
$\varGamma _{min}^* \equiv \varGamma _{min}/c_0$, where  $c_0=\varGamma _0/h_0$. The collapse of the data obtained from simulations with different initial conditions onto one line
$c_0=\varGamma _0/h_0$. The collapse of the data obtained from simulations with different initial conditions onto one line  $\varGamma _{min}^*=0.0304\tau$, which is also denoted by a pink dotted line, makes plain that as
$\varGamma _{min}^*=0.0304\tau$, which is also denoted by a pink dotted line, makes plain that as  $\tau \to 0$,
$\tau \to 0$,  $\varGamma _{min}=(0.0304\varGamma _0/h_0)\tau$.
$\varGamma _{min}=(0.0304\varGamma _0/h_0)\tau$.
4.2. Pinch-off with surface rheological effects (1D)
4.2.1. Determination of scaling exponents
Armed with a thorough understanding of the asymptotic breakup dynamics in the absence of surface rheological effects when  $Pe \to \infty$, we are now better positioned to begin to uncover how the physics of pinch-off is altered by their presence and also appreciate certain salient features and implications of the resulting dynamics. It is noteworthy to recall that surface rheological effects are accounted for by a single additional term in the 1-D momentum balance equation (2.17) compared to when they are absent. Therefore, the entire approach and analysis reported in the previous section prior to obtaining solutions, i.e. the self-similarity ansatz, the 1-D mass balance, the convection–diffusion equation, the linearization of the Szyszkowski equation, and the far-field conditions, with the exception of the 1-D momentum equation, apply unaltered in the present situation. Thus, we borrow these earlier findings and exploit them to investigate how surface rheological effects alter the dominant force balance, thinning rate and surfactant depletion rate when
$Pe \to \infty$, we are now better positioned to begin to uncover how the physics of pinch-off is altered by their presence and also appreciate certain salient features and implications of the resulting dynamics. It is noteworthy to recall that surface rheological effects are accounted for by a single additional term in the 1-D momentum balance equation (2.17) compared to when they are absent. Therefore, the entire approach and analysis reported in the previous section prior to obtaining solutions, i.e. the self-similarity ansatz, the 1-D mass balance, the convection–diffusion equation, the linearization of the Szyszkowski equation, and the far-field conditions, with the exception of the 1-D momentum equation, apply unaltered in the present situation. Thus, we borrow these earlier findings and exploit them to investigate how surface rheological effects alter the dominant force balance, thinning rate and surfactant depletion rate when  $Pe \to \infty$.
$Pe \to \infty$.
Therefore,  $\alpha _v = \alpha _z -1$ and
$\alpha _v = \alpha _z -1$ and  $\alpha _{\varGamma } = \alpha _h$ in the presence as well as absence of surface rheological effects, and the 1-D momentum equation with surface rheological effects in similarity space becomes
$\alpha _{\varGamma } = \alpha _h$ in the presence as well as absence of surface rheological effects, and the 1-D momentum equation with surface rheological effects in similarity space becomes
where  $B_o \equiv \mu _{sr}/\mu l_{\mu }$ is the Boussinesq–Scriven number and
$B_o \equiv \mu _{sr}/\mu l_{\mu }$ is the Boussinesq–Scriven number and  $\mu _{sr}$ is the reference surface viscosity (
$\mu _{sr}$ is the reference surface viscosity ( $\mu _{sr} \equiv \mu _{s}|_{\tilde {\varGamma }=\tilde {\varGamma }_p}$). Written in this form, it is clear that the term accounting for surface viscous effects (red) scales in exactly the same manner as the bulk viscous term. Thus, the forces entering the dominant balance are changed so that the balance is now between inertial, capillary, bulk viscous and surface viscous forces but the scaling exponents are unaltered so that
$\mu _{sr} \equiv \mu _{s}|_{\tilde {\varGamma }=\tilde {\varGamma }_p}$). Written in this form, it is clear that the term accounting for surface viscous effects (red) scales in exactly the same manner as the bulk viscous term. Thus, the forces entering the dominant balance are changed so that the balance is now between inertial, capillary, bulk viscous and surface viscous forces but the scaling exponents are unaltered so that  $\alpha _h=\alpha _{\varGamma }=1$,
$\alpha _h=\alpha _{\varGamma }=1$,  $\alpha _z=1/2$ and
$\alpha _z=1/2$ and  $\alpha _v=-1/2$. Therefore, the power-law dependencies of the variation with
$\alpha _v=-1/2$. Therefore, the power-law dependencies of the variation with  $\tau$ of the jet radius, surfactant concentration, axial length and axial velocity are unaffected by surfactants that give rise to surface rheological effects compared to ones that do not. Thus, changes brought about by surface rheological effects are undetectable by considering scaling exponents alone and an analysis of the thinning rate is required. The modified rate of thinning can be determined by substituting the power series expansions given in (4.13a–c) into (
$\tau$ of the jet radius, surfactant concentration, axial length and axial velocity are unaffected by surfactants that give rise to surface rheological effects compared to ones that do not. Thus, changes brought about by surface rheological effects are undetectable by considering scaling exponents alone and an analysis of the thinning rate is required. The modified rate of thinning can be determined by substituting the power series expansions given in (4.13a–c) into (
) which is first rewritten as
Unlike the analysis in the absence of surface rheological effects, here, the momentum equation in similarity space governing the asymptotic thinning of the jet (
4.17) includes effects brought on by surfactants.
4.2.2. Determination of thinning rate
When surface rheological effects are accounted for, the corresponding coefficient matrix that arises in the recurrence relations reported in § 4.1.2 in their absence can be shown to be given by

where the new terms that arise because of surface rheological effects have been highlighted in red. Here, the vanishing of the determinant of this matrix is clearly dependent upon  $G_0$ as a result of the terms that are shown in red. In this case, the singular values of
$G_0$ as a result of the terms that are shown in red. In this case, the singular values of  $H_0$ are given by
$H_0$ are given by
 \begin{equation} H^{sin}_0(n)=\frac{1}{(15n-12)}-\frac{5B_oG_0}{3}, \quad n=1,2,3,\ldots . \end{equation}
\begin{equation} H^{sin}_0(n)=\frac{1}{(15n-12)}-\frac{5B_oG_0}{3}, \quad n=1,2,3,\ldots . \end{equation}
Results of simulations highlighted in figure 4 when  $B_o=2/3$ and others in which the 1-D evolution equations have been solved in physical space show that when surface rheological effects are accounted for, jets thin according to
$B_o=2/3$ and others in which the 1-D evolution equations have been solved in physical space show that when surface rheological effects are accounted for, jets thin according to
 \begin{equation} h_{min} =\left(0.0304-\frac{5B_oG_0}{3}\right)\tau. \end{equation}
\begin{equation} h_{min} =\left(0.0304-\frac{5B_oG_0}{3}\right)\tau. \end{equation}
This scaling law, shown by the black dashed line in figure 4, is extremely close to  $h_{min}=H^{sin}_0(3)\tau$ but is markedly different from the scaling law given by (4.1) which is shown by the pink dotted line in figure 4. While figure 4 and the above analysis reveal that the power-law scaling of jet radius with
$h_{min}=H^{sin}_0(3)\tau$ but is markedly different from the scaling law given by (4.1) which is shown by the pink dotted line in figure 4. While figure 4 and the above analysis reveal that the power-law scaling of jet radius with  $\tau$ is unaltered by surface viscosity, surface rheological effects profoundly affect the dynamics in that they reduce the asymptotic rate at which a jet thins: whereas the prefactor in the expression relating
$\tau$ is unaltered by surface viscosity, surface rheological effects profoundly affect the dynamics in that they reduce the asymptotic rate at which a jet thins: whereas the prefactor in the expression relating  $h_{min}$ to
$h_{min}$ to  $\tau$ equals 0.0304 in the absence of surface rheological effects, the prefactor is reduced by
$\tau$ equals 0.0304 in the absence of surface rheological effects, the prefactor is reduced by  $5B_oG_0/3$ in their presence. Using the same arguments as in § 4.1.3, it is clear that (4.20) can be rewritten as
$5B_oG_0/3$ in their presence. Using the same arguments as in § 4.1.3, it is clear that (4.20) can be rewritten as
 \begin{equation} h_{min} =\frac{0.0304}{\left(1+\dfrac{5B_o\varGamma_0}{3h_0}\right)}\tau. \end{equation}
\begin{equation} h_{min} =\frac{0.0304}{\left(1+\dfrac{5B_o\varGamma_0}{3h_0}\right)}\tau. \end{equation}Written in this form, the term in the denominator that accounts for the reduction in the jet's thinning rate has a very simple physical interpretation. From the 1-D momentum equation (2.17), it can readily be appreciated that the ratio of surface viscous force to bulk viscous force locally scales as
 \begin{equation} \frac{{\text{Surface viscous force}}}{{\text{Bulk viscous force}}} \sim \frac 53 \frac {\mu_s}{\mu \tilde{h}}, \end{equation}
\begin{equation} \frac{{\text{Surface viscous force}}}{{\text{Bulk viscous force}}} \sim \frac 53 \frac {\mu_s}{\mu \tilde{h}}, \end{equation}
where the term multiplying 5/3 can be thought of as a local Boussinesq–Scriven number. Therefore, it now becomes clear that  $5B_o G_0/3H_0 = 5B_o c_0/3=5B_o\varGamma _0/3h_0$ represents the scale of the relative importance of surface viscous force to its bulk counterpart as
$5B_o G_0/3H_0 = 5B_o c_0/3=5B_o\varGamma _0/3h_0$ represents the scale of the relative importance of surface viscous force to its bulk counterpart as  $\tau \to 0$. Moreover, when written in the form given in (4.21), it is plain that the prefactor or amplitude in the scaling law is dependent on the initial conditions imposed on the jet. As a further check on the validity of this scaling law, it is shown in the inset to figure 5 that the thinning dynamics that arise for three different initial conditions all collapse onto one line the equation of which is given by
$\tau \to 0$. Moreover, when written in the form given in (4.21), it is plain that the prefactor or amplitude in the scaling law is dependent on the initial conditions imposed on the jet. As a further check on the validity of this scaling law, it is shown in the inset to figure 5 that the thinning dynamics that arise for three different initial conditions all collapse onto one line the equation of which is given by  $h^*_{min} \equiv h_{min}(1+{5B_o\varGamma _0}/{3h_0}) = 0.0304 \tau$.
$h^*_{min} \equiv h_{min}(1+{5B_o\varGamma _0}/{3h_0}) = 0.0304 \tau$.

Figure 4. Transient evolution of minimum jet radius and surfactant concentration at that location and axial length and axial velocity predicted from 1-D simulations. Computed variation with  $\tau$ of
$\tau$ of  $h_{min}$ (green square
$h_{min}$ (green square  $\square$ symbols),
$\square$ symbols),  $z' \equiv z_{1.04h_{min}}-z_{min}$ (orange diamond
$z' \equiv z_{1.04h_{min}}-z_{min}$ (orange diamond  $\diamond$ symbols),
$\diamond$ symbols),  $v' \equiv v_{1.04h_{min}}$ (red circle
$v' \equiv v_{1.04h_{min}}$ (red circle  $\circ$ symbols) and
$\circ$ symbols) and  $\varGamma _{min} \equiv \varGamma |_{h_{min}}$ (blue triangle
$\varGamma _{min} \equiv \varGamma |_{h_{min}}$ (blue triangle  $\triangle$ symbols ) for a jet of
$\triangle$ symbols ) for a jet of  $Pe=\infty$,
$Pe=\infty$,  $\varGamma _m = 0.3$ and
$\varGamma _m = 0.3$ and  $\varGamma _0=0.15$ in the presence of surface rheological effects (
$\varGamma _0=0.15$ in the presence of surface rheological effects ( $B_o=2/3$). The solid black lines that are superimposed on the simulation results for
$B_o=2/3$). The solid black lines that are superimposed on the simulation results for  $\varGamma _{min}$,
$\varGamma _{min}$,  $z'$ and
$z'$ and  $v'$ as
$v'$ as  $\tau \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. The pink dotted line, with the indicated slope of unity, is Eggers’ solution,
$\tau \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. The pink dotted line, with the indicated slope of unity, is Eggers’ solution,  $h_{min}=0.0304\tau$, for a jet with a clean interface (Eggers Reference Eggers1993) or a surfactant-covered jet without surface rheological effects (this paper). The black dashed line, also of slope unity, is the plot of the equation given by
$h_{min}=0.0304\tau$, for a jet with a clean interface (Eggers Reference Eggers1993) or a surfactant-covered jet without surface rheological effects (this paper). The black dashed line, also of slope unity, is the plot of the equation given by  $h_{min} =0.0304 \tau / (1+{5B_o\varGamma _0}/{3h_0} )$, i.e. (4.21). The inset shows a blow-up or zoomed-in view of both
$h_{min} =0.0304 \tau / (1+{5B_o\varGamma _0}/{3h_0} )$, i.e. (4.21). The inset shows a blow-up or zoomed-in view of both  $h_{min}$ and
$h_{min}$ and  $\varGamma _{min}$ versus
$\varGamma _{min}$ versus  $\tau$ and also helps make clear the difference between these two scaling laws.
$\tau$ and also helps make clear the difference between these two scaling laws.

Figure 5. The 1-D simulation results on the computed variation with  $\tau$ of
$\tau$ of  $h_{min}$ for a jet of
$h_{min}$ for a jet of  $Pe=\infty$ and
$Pe=\infty$ and  $\varGamma _m = 0.3$ in the presence of surface rheological effects (
$\varGamma _m = 0.3$ in the presence of surface rheological effects ( $B_o \ne 0$) that are subjected to different initial conditions. Unlike the situations in the absence of surface rheological effects, simulations reveal that when surface rheological effects are important the prefactor in the scaling law relating
$B_o \ne 0$) that are subjected to different initial conditions. Unlike the situations in the absence of surface rheological effects, simulations reveal that when surface rheological effects are important the prefactor in the scaling law relating  $h_{min}$ and
$h_{min}$ and  $\tau$ as
$\tau$ as  $\tau \to 0$ is not only a function of
$\tau \to 0$ is not only a function of  $B_o$ but also of the initial conditions (
$B_o$ but also of the initial conditions ( $c_0=\varGamma _0/h_0$). The inset shows the variation of the rescaled minimum jet radius,
$c_0=\varGamma _0/h_0$). The inset shows the variation of the rescaled minimum jet radius,  $h_{min}^* \equiv h_{min}(1+5c_0B_o/3)$, with
$h_{min}^* \equiv h_{min}(1+5c_0B_o/3)$, with  $\tau$. The collapse shown in the inset of the data obtained from simulations with different initial conditions onto one line
$\tau$. The collapse shown in the inset of the data obtained from simulations with different initial conditions onto one line  $h_{min}^*=0.0304\tau$ (the pink dotted line) clearly reveals that surfactant-covered filaments in the presence of surface rheological effects do indeed thin according to (4.21).
$h_{min}^*=0.0304\tau$ (the pink dotted line) clearly reveals that surfactant-covered filaments in the presence of surface rheological effects do indeed thin according to (4.21).
5. The 3DA results and discussion
In the previous section, analysis of the 1-D slender-jet equations by using theory and simulations in the limit of  $Pe \to \infty$ has revealed the simple manner in which surface rheological effects act to slow the capillary thinning of a surfactant-covered jet. However, a number of real life complications may preclude the observation of dynamics that comports with the simple formulae given in that section. Among others, these complications include the following. For example, for a real system,
$Pe \to \infty$ has revealed the simple manner in which surface rheological effects act to slow the capillary thinning of a surfactant-covered jet. However, a number of real life complications may preclude the observation of dynamics that comports with the simple formulae given in that section. Among others, these complications include the following. For example, for a real system,  $Pe$ may be finite and surface viscosity may be a nonlinear function of
$Pe$ may be finite and surface viscosity may be a nonlinear function of  $\tilde {\varGamma }$ (see appendix A). Also, the Eggers-like asymptotic regime of pinch-off reported earlier may not be observed until small length and time distances from the singularity are attained. Moreover, the value of
$\tilde {\varGamma }$ (see appendix A). Also, the Eggers-like asymptotic regime of pinch-off reported earlier may not be observed until small length and time distances from the singularity are attained. Moreover, the value of  $h_{min}$ for which the dynamics would begin to follow the scaling laws given in that section may be smaller than the molecular length scale. Furthermore, as first shown by Castrejón-Pita et al. (Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015) and later by Li & Sprittles (Reference Li and Sprittles2016) during the capillary thinning of surfactant-free jets, the dominant balance of forces in the vicinity of the jet's minimum radius may change multiple times and hence the dynamics may traverse a number of intermediate scaling regimes (Eggers Reference Eggers2005) before finally settling down in the final asymptotic regime of pinch-off as
$h_{min}$ for which the dynamics would begin to follow the scaling laws given in that section may be smaller than the molecular length scale. Furthermore, as first shown by Castrejón-Pita et al. (Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015) and later by Li & Sprittles (Reference Li and Sprittles2016) during the capillary thinning of surfactant-free jets, the dominant balance of forces in the vicinity of the jet's minimum radius may change multiple times and hence the dynamics may traverse a number of intermediate scaling regimes (Eggers Reference Eggers2005) before finally settling down in the final asymptotic regime of pinch-off as  $\tau \to 0$. Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) have shown that such intermediate regimes are also encountered during the capillary thinning of a surfactant-covered jet albeit in the absence of surface rheological effects. Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) have further shown that the occurrence of the intermediate regimes that are encountered as a surfactant-laden jet approaches pinch-off is associated with a cascade of microthreads the occurrences of which are directly attributable to the action of Marangoni stresses.
$\tau \to 0$. Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) have shown that such intermediate regimes are also encountered during the capillary thinning of a surfactant-covered jet albeit in the absence of surface rheological effects. Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018) have further shown that the occurrence of the intermediate regimes that are encountered as a surfactant-laden jet approaches pinch-off is associated with a cascade of microthreads the occurrences of which are directly attributable to the action of Marangoni stresses.
Thus, in the remainder of this section, we analyse the capillary thinning and breakup of a surfactant-covered jet in the presence of surface rheological effects from simulations carried out by solving the full 3DA equations governing the dynamics of the jet. As in a real laboratory experiment that would be carried out with liquid jets or bridges, we take the unperturbed radius of the jet  $R$, the inertio-capillary time scale
$R$, the inertio-capillary time scale  $\sqrt {{\rho R^3}/{\sigma _p}}$, and the maximum packing density of surfactant
$\sqrt {{\rho R^3}/{\sigma _p}}$, and the maximum packing density of surfactant  $\tilde {\varGamma }_m$ as the characteristic length, time and surfactant concentration scales to non-dimensionalize the problem. To distinguish dimensionless variables using these new scales from ones used earlier, we use ‘hats’ so that hatted variables represent the dimensionless counterparts of variables with tildes, e.g.
$\tilde {\varGamma }_m$ as the characteristic length, time and surfactant concentration scales to non-dimensionalize the problem. To distinguish dimensionless variables using these new scales from ones used earlier, we use ‘hats’ so that hatted variables represent the dimensionless counterparts of variables with tildes, e.g.  $\hat {h}_{min} \equiv {\tilde {h}_{min}}/{R}$ is dimensionless whereas
$\hat {h}_{min} \equiv {\tilde {h}_{min}}/{R}$ is dimensionless whereas  $\tilde {h}_{min}$ is dimensional. With the introduction of these characteristic scales, it is found that the dynamics of surfactant-laden jets with surface rheological effects are governed by a number of dimensionless groups. They include: (a) the Ohnesorge number
$\tilde {h}_{min}$ is dimensional. With the introduction of these characteristic scales, it is found that the dynamics of surfactant-laden jets with surface rheological effects are governed by a number of dimensionless groups. They include: (a) the Ohnesorge number  $Oh\equiv {\mu }/{\sqrt {\rho R \sigma _p}}$, and the dimensionless wavenumber and amplitude of the initial shape perturbation
$Oh\equiv {\mu }/{\sqrt {\rho R \sigma _p}}$, and the dimensionless wavenumber and amplitude of the initial shape perturbation  $\hat {k} \equiv \tilde {k} R$ and
$\hat {k} \equiv \tilde {k} R$ and  $\hat {\epsilon } \equiv \tilde {\epsilon }/R$ as in the case of jets with clean interfaces; the dimensionless initial surfactant coverage
$\hat {\epsilon } \equiv \tilde {\epsilon }/R$ as in the case of jets with clean interfaces; the dimensionless initial surfactant coverage  $\hat {\varGamma }_0\equiv {\tilde {\varGamma }_0}/{\tilde {\varGamma }_m}$ and the surfactant strength parameter
$\hat {\varGamma }_0\equiv {\tilde {\varGamma }_0}/{\tilde {\varGamma }_m}$ and the surfactant strength parameter  $\beta \equiv {\tilde {\varGamma }_m R_g T}/{\sigma _p}$ as with surfactant-covered jets without surface rheological effects; and the Boussinesq–Scriven number
$\beta \equiv {\tilde {\varGamma }_m R_g T}/{\sigma _p}$ as with surfactant-covered jets without surface rheological effects; and the Boussinesq–Scriven number  $B_s=B_{s0}({\hat {\varGamma }}/{\hat {\varGamma }_0})$ where
$B_s=B_{s0}({\hat {\varGamma }}/{\hat {\varGamma }_0})$ where  $B_{s0} \equiv ({\mu _s|_{\tilde {\varGamma }=\tilde {\varGamma }_0}})/{\mu R}$.
$B_{s0} \equiv ({\mu _s|_{\tilde {\varGamma }=\tilde {\varGamma }_0}})/{\mu R}$.
5.1. Scaling exponents
Figure 6 shows the variation with time remaining until breakup  $\hat {\tau }$ of the jet's minimum radius
$\hat {\tau }$ of the jet's minimum radius  $\hat {h}_{min}$, the axial length scale
$\hat {h}_{min}$, the axial length scale  $\hat {z}' \equiv \hat {z}_{1.09 \hat {h}_{min}}-\hat {z}_{min}$, the axial velocity scale
$\hat {z}' \equiv \hat {z}_{1.09 \hat {h}_{min}}-\hat {z}_{min}$, the axial velocity scale  $\hat {v}' \equiv \hat {v}_{1.09 \hat {h}_{min}}$ and surfactant concentration where jet radius is a minimum
$\hat {v}' \equiv \hat {v}_{1.09 \hat {h}_{min}}$ and surfactant concentration where jet radius is a minimum  $\hat {\varGamma }_{min} \equiv \hat {\varGamma }_{\hat {h}_{min}}$ for two jets undergoing capillary thinning in the presence of surface rheological effects (
$\hat {\varGamma }_{min} \equiv \hat {\varGamma }_{\hat {h}_{min}}$ for two jets undergoing capillary thinning in the presence of surface rheological effects ( $B_{s0}=0.0143$). The two sets of simulation results are distinghuished by the fact in one
$B_{s0}=0.0143$). The two sets of simulation results are distinghuished by the fact in one  $\hat {\varGamma }_0 = 0.55$ (figure 6a) and in the other
$\hat {\varGamma }_0 = 0.55$ (figure 6a) and in the other  $\hat {\varGamma }_0 = 0.5$ (figure 6b). We note that in contrast to the results shown in §§ 4.1 and 4.2, here
$\hat {\varGamma }_0 = 0.5$ (figure 6b). We note that in contrast to the results shown in §§ 4.1 and 4.2, here  $Pe$ is large but finite (
$Pe$ is large but finite ( $Pe = 1000$).
$Pe = 1000$).

Figure 6. Transient evolution of minimum jet radius and surfactant concentration at that location and axial length and axial velocity predicted from 3DA simulations. (a) Computed variation with  $\hat {\tau }$ of
$\hat {\tau }$ of  $\hat {h}_{min}$ (green square
$\hat {h}_{min}$ (green square  $\square$ symbols),
$\square$ symbols),  $\hat {z}' \equiv \hat {z}_{1.09\hat {h}_{min}}-\hat {z}_{min}$ (orange diamond
$\hat {z}' \equiv \hat {z}_{1.09\hat {h}_{min}}-\hat {z}_{min}$ (orange diamond  $\diamond$ symbols),
$\diamond$ symbols),  $\hat {v}' \equiv \hat {v}'_{1.09\hat {h}_{min}}$ (red circle
$\hat {v}' \equiv \hat {v}'_{1.09\hat {h}_{min}}$ (red circle  $\circ$ symbols) and
$\circ$ symbols) and  $\hat {\varGamma }_{min}$ (blue triangle
$\hat {\varGamma }_{min}$ (blue triangle  $\triangle$ symbols) for a jet of
$\triangle$ symbols) for a jet of  $Oh=0.07$,
$Oh=0.07$,  $Pe=1000$,
$Pe=1000$,  $\beta =0.3$,
$\beta =0.3$,  $\hat {\varGamma }_0=0.55$ and
$\hat {\varGamma }_0=0.55$ and  $B_{s0}=0.0143$. (b) Same as (a) except
$B_{s0}=0.0143$. (b) Same as (a) except  $\hat {\varGamma }_0=0.5$. Insets: zoomed-in views of
$\hat {\varGamma }_0=0.5$. Insets: zoomed-in views of  $\hat {h}_{min}$ and
$\hat {h}_{min}$ and  $\hat {\varGamma }_{min}$ versus
$\hat {\varGamma }_{min}$ versus  $\hat {\tau }$ as
$\hat {\tau }$ as  $\hat {\tau } \to 0$. In both (a,b), the solid black lines that are superimposed on the simulation results for
$\hat {\tau } \to 0$. In both (a,b), the solid black lines that are superimposed on the simulation results for  $\hat {\varGamma }_{min}$,
$\hat {\varGamma }_{min}$,  $\hat {z}'$ and
$\hat {z}'$ and  $\hat {v}'$ as
$\hat {v}'$ as  $\tau \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. Also in both the main parts and the insets of (a,b), Eggers’ solution,
$\tau \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. Also in both the main parts and the insets of (a,b), Eggers’ solution,  $\hat {h}=0.0304\hat {\tau }/Oh$, is denoted by the pink dotted line of slope unity. Similarly, the new scaling law,
$\hat {h}=0.0304\hat {\tau }/Oh$, is denoted by the pink dotted line of slope unity. Similarly, the new scaling law,  $\hat {h}=[0.0304/Oh(1+5B_{s0}\hat {c}_0/3\hat {\varGamma }_0)]\hat {\tau }$, where
$\hat {h}=[0.0304/Oh(1+5B_{s0}\hat {c}_0/3\hat {\varGamma }_0)]\hat {\tau }$, where  $\hat {c}_0 \equiv \lim _{\hat {\tau } \to 0} \hat {\varGamma }_{min}/\hat {h}_{min}$, is denoted by the dashed black line of slope unity.
$\hat {c}_0 \equiv \lim _{\hat {\tau } \to 0} \hat {\varGamma }_{min}/\hat {h}_{min}$, is denoted by the dashed black line of slope unity.
Among others, two interesting features stand out in figure 6 compared to the 1-D results shown in figures 2–5: in figure 6(a,b), there exist several instants in time at which  $\hat {v}'$ suddenly plummets and short periods of time where
$\hat {v}'$ suddenly plummets and short periods of time where  $\hat {\varGamma }_{min} \neq c \hat {h}_{min}$. These complex features, which are absent from the 1-D simulation results reported in §§ 4.1 and 4.2, are of course due to the existence of intermediate regimes and the repeated formation of microthreads, as has already been reported in simulations and experiments by Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018). Indeed, figure 7 shows the repeated formation of microthreads in (a) the presence and (b) absence of surface rheological effects during jet thinning. Although the number of microthreads in figure 7(a) – the number of times the stagnation zone approaches the axial location where thread radius is a minimum (Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018) – is the same as in figure 7(b), the shape of the main thread is drastically different in the two cases. Furthermore, the number of instants at which the velocity plummets was found to be different in the presence and absence of surface rheological effects. The impact of this observation on thread profiles and what factors determine the number of times at which the velocity plummets remain open problems for future study. However, regardless of the differences that exist between 1-D and 3DA results for
$\hat {\varGamma }_{min} \neq c \hat {h}_{min}$. These complex features, which are absent from the 1-D simulation results reported in §§ 4.1 and 4.2, are of course due to the existence of intermediate regimes and the repeated formation of microthreads, as has already been reported in simulations and experiments by Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018). Indeed, figure 7 shows the repeated formation of microthreads in (a) the presence and (b) absence of surface rheological effects during jet thinning. Although the number of microthreads in figure 7(a) – the number of times the stagnation zone approaches the axial location where thread radius is a minimum (Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018) – is the same as in figure 7(b), the shape of the main thread is drastically different in the two cases. Furthermore, the number of instants at which the velocity plummets was found to be different in the presence and absence of surface rheological effects. The impact of this observation on thread profiles and what factors determine the number of times at which the velocity plummets remain open problems for future study. However, regardless of the differences that exist between 1-D and 3DA results for  $\hat {\tau } > 10^{-3}$, figure 6(a,b) make plain that the dynamics asymptotically exhibits the same power-law scalings that are exhibited in the Eggers-like regime reported in the previous section. Thus, as pinch-off nears, the 3DA simulations reveal that the same dominant balance of forces exists here as in § 4.2.1 and that
$\hat {\tau } > 10^{-3}$, figure 6(a,b) make plain that the dynamics asymptotically exhibits the same power-law scalings that are exhibited in the Eggers-like regime reported in the previous section. Thus, as pinch-off nears, the 3DA simulations reveal that the same dominant balance of forces exists here as in § 4.2.1 and that  $\hat {h}_{min} \sim \hat {\tau }$,
$\hat {h}_{min} \sim \hat {\tau }$,  $\hat {v}' \sim \hat {\tau }^{-1/2}$,
$\hat {v}' \sim \hat {\tau }^{-1/2}$,  $\hat {z}' \sim \hat {\tau }^{1/2}$ and
$\hat {z}' \sim \hat {\tau }^{1/2}$ and  $\hat {\varGamma }_{min} \sim \hat {\tau }$ as
$\hat {\varGamma }_{min} \sim \hat {\tau }$ as  $\hat {\tau } \to 0$.
$\hat {\tau } \to 0$.

Figure 7. Profiles at the incipience of pinch-off of jets with and without surface rheological effects. (a) Zoomed-in views of microthreads at the instant in time when  $t=11.413$ for the same jet as in figure 6(a) and for which surface rheological effects are present. (b) Same as (a) except when surface rheological effects are absent or
$t=11.413$ for the same jet as in figure 6(a) and for which surface rheological effects are present. (b) Same as (a) except when surface rheological effects are absent or  $B_{s0}=0$ at the instant in time when
$B_{s0}=0$ at the instant in time when  $t=11.357$. It should be noted that the parameter values in this case are identical to those used in figure 2 of the paper by Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018).
$t=11.357$. It should be noted that the parameter values in this case are identical to those used in figure 2 of the paper by Kamat et al. (Reference Kamat, Wagoner, Thete and Basaran2018).
5.2. Thinning rate
Although the power-law scalings obtained theoretically using the 1-D slender-jet equations are observed in the 3DA simulations (figure 6), the validity of the thinning rates predicted by (4.1) and (4.21) in the final asymptotic regime of pinch-off shown in figure 6 has yet to be demonstrated. With the characteristic length and time scales used in this section, (4.1) and (4.21) can be rewritten as
 \begin{gather} \hat{h}_{min} =\frac{0.0304}{Oh}\hat{\tau}, \end{gather}
\begin{gather} \hat{h}_{min} =\frac{0.0304}{Oh}\hat{\tau}, \end{gather} \begin{gather} \hat{h}_{min} =\frac{0.0304}{Oh \left (1+\dfrac{5B_{s0}}{3\hat{h}_0}\right )}\hat{\tau}. \end{gather}
\begin{gather} \hat{h}_{min} =\frac{0.0304}{Oh \left (1+\dfrac{5B_{s0}}{3\hat{h}_0}\right )}\hat{\tau}. \end{gather} It is easily seen from the insets to figure 6 that neither (5.1) (pink dotted line) nor (5.2) (red dashed-dotted line) accurately describes the thinning of surfactant-covered jets: the three lines corresponding to these two equations and the line corresponding to the simulation results all have the same slopes (of unity) but the amplitudes or prefactors in the expressions relating  $\hat {h}_{min}$ to
$\hat {h}_{min}$ to  $\hat {\tau }$ evidently differ. While comparison of simulation data to the theoretical expressions clearly demonstrates that the thinning is slowed due to the effects of surface viscosity, the conditions implied in producing a closed form solution to thinning rate (see § 4.2.2) appear to be violated in the 3DA simulations. Specifically, the conditions under which the theory was developed cannot be naively applied in the present situation. This unexpected difficulty arises because in contrast to the results shown in figures 2 and 4,
$\hat {\tau }$ evidently differ. While comparison of simulation data to the theoretical expressions clearly demonstrates that the thinning is slowed due to the effects of surface viscosity, the conditions implied in producing a closed form solution to thinning rate (see § 4.2.2) appear to be violated in the 3DA simulations. Specifically, the conditions under which the theory was developed cannot be naively applied in the present situation. This unexpected difficulty arises because in contrast to the results shown in figures 2 and 4,  $\hat {\varGamma }_{min}$ is not linearly proportional to
$\hat {\varGamma }_{min}$ is not linearly proportional to  $\hat {h}_{min}$ during the early (figure 6a,b,
$\hat {h}_{min}$ during the early (figure 6a,b,  $\hat {\tau } > 1$) and intermediate (figure 6a,
$\hat {\tau } > 1$) and intermediate (figure 6a,  $\hat {\tau } \approx 10^{-1}$) stages of thinning. Indeed, after the onset of the Rayleigh–Plateau instability, the jets whose dynamics are depicted in figure 6 do not immediately enter a final asymptotic Eggers-like regime. Thus, as shown in figure 6, these jets, as their surfactant-free counterparts and surfactant-covered ones without surface rheological effects, traverse a number of scaling regimes where the balance of forces differs from that in the Eggers-like regime of § 4.2.2 and where the scaling exponents have different values than the ones in § 4.2.2. While the constant
$\hat {\tau } \approx 10^{-1}$) stages of thinning. Indeed, after the onset of the Rayleigh–Plateau instability, the jets whose dynamics are depicted in figure 6 do not immediately enter a final asymptotic Eggers-like regime. Thus, as shown in figure 6, these jets, as their surfactant-free counterparts and surfactant-covered ones without surface rheological effects, traverse a number of scaling regimes where the balance of forces differs from that in the Eggers-like regime of § 4.2.2 and where the scaling exponents have different values than the ones in § 4.2.2. While the constant  $\hat {c}_0$ relating
$\hat {c}_0$ relating  $\hat {\varGamma }$ to
$\hat {\varGamma }$ to  $\hat {h}$ in the final asymptotic regime in an experiment or a 3DA simulation is no longer set by the initial conditions, its value can be readily determined from the 3DA simulations by computing the value of the ratio
$\hat {h}$ in the final asymptotic regime in an experiment or a 3DA simulation is no longer set by the initial conditions, its value can be readily determined from the 3DA simulations by computing the value of the ratio  $\hat {\varGamma }_{min}/\hat {h}_{min}$ as
$\hat {\varGamma }_{min}/\hat {h}_{min}$ as  $\hat {\tau } \to 0$. Therefore, the proper generalization of (5.2) is obtained by replacing the ratio
$\hat {\tau } \to 0$. Therefore, the proper generalization of (5.2) is obtained by replacing the ratio  $B_{s0}/\hat {h}_0$ by the ratio of the Boussinesq number and minimum jet radius at the onset of the final asymptotic regime. If the time at which the final asymptotic regime starts is denoted by
$B_{s0}/\hat {h}_0$ by the ratio of the Boussinesq number and minimum jet radius at the onset of the final asymptotic regime. If the time at which the final asymptotic regime starts is denoted by  $\hat {t}^*$,
$\hat {t}^*$,
 \begin{equation} \left. \frac{B_s}{\hat{h}_{min}}\right|_{\hat{t} = \hat{t}^*} = \frac{B_{s0}\dfrac{\hat{\varGamma}_{min}|_{\hat{t} = \hat{t}^*}} {\hat{\varGamma}_0} } {\hat{h}_{min}|_{\hat{t} = \hat{t}^*} } = \frac{B_{s0}}{\hat{\varGamma}_0} \frac{\hat{\varGamma}_{min}} {\hat{h}_{min}} = \frac{B_{s0} \hat{c}_0}{\hat{\varGamma}_0}, \end{equation}
\begin{equation} \left. \frac{B_s}{\hat{h}_{min}}\right|_{\hat{t} = \hat{t}^*} = \frac{B_{s0}\dfrac{\hat{\varGamma}_{min}|_{\hat{t} = \hat{t}^*}} {\hat{\varGamma}_0} } {\hat{h}_{min}|_{\hat{t} = \hat{t}^*} } = \frac{B_{s0}}{\hat{\varGamma}_0} \frac{\hat{\varGamma}_{min}} {\hat{h}_{min}} = \frac{B_{s0} \hat{c}_0}{\hat{\varGamma}_0}, \end{equation}
where use has been made of the fact that in the final asymptotic regime, the ratio of  $\hat {\varGamma }_{min}/\hat {h}_{min}$ is a constant. In conclusion, the proper generalization of (5.2) is then given by
$\hat {\varGamma }_{min}/\hat {h}_{min}$ is a constant. In conclusion, the proper generalization of (5.2) is then given by
 \begin{equation} \hat{h}_{min} =\frac{0.0304}{Oh \left ( 1+\dfrac{5B_{s0}\hat{c}_0}{3\hat{\varGamma}_0} \right ) }\hat{\tau}, \quad {\text{where }} \hat{c}_0 \equiv \lim_{\hat{\tau} \to 0} \left ( \frac {\hat{\varGamma}_{min}}{\hat{h}_{min}} \right). \end{equation}
\begin{equation} \hat{h}_{min} =\frac{0.0304}{Oh \left ( 1+\dfrac{5B_{s0}\hat{c}_0}{3\hat{\varGamma}_0} \right ) }\hat{\tau}, \quad {\text{where }} \hat{c}_0 \equiv \lim_{\hat{\tau} \to 0} \left ( \frac {\hat{\varGamma}_{min}}{\hat{h}_{min}} \right). \end{equation}
Since (5.4) applies as pinch-off nears, it can be rewritten so that it does not involve  $Oh$ by using
$Oh$ by using  $\hat {h}_{min} = \tilde {h}_{min}/R = (\tilde {h}_{min}/l_{\mu }) Oh^2 = h_{min} Oh^2$ and
$\hat {h}_{min} = \tilde {h}_{min}/R = (\tilde {h}_{min}/l_{\mu }) Oh^2 = h_{min} Oh^2$ and  $\hat {\tau } = \tilde {\tau }/t_c = (\tilde {\tau } / t_{\mu }) Oh^3 = \tau Oh^3$:
$\hat {\tau } = \tilde {\tau }/t_c = (\tilde {\tau } / t_{\mu }) Oh^3 = \tau Oh^3$:
 \begin{equation} h_{min} =\frac{0.0304}{1+\dfrac{5B_{s0}\hat{c}_0}{3\hat{\varGamma}_0} } \tau, \end{equation}
\begin{equation} h_{min} =\frac{0.0304}{1+\dfrac{5B_{s0}\hat{c}_0}{3\hat{\varGamma}_0} } \tau, \end{equation}
where  $\hat {c}_0 \equiv \hat {\varGamma }_{min}/\hat {h}_{min}$ as
$\hat {c}_0 \equiv \hat {\varGamma }_{min}/\hat {h}_{min}$ as  $\tau \to 0$.
$\tau \to 0$.
The generalized approach and the result stated in (5.4) have been found to be valid for every 1-D and 3DA simulation in which the spatially 1-D and 3DA transient PDEs, i.e. the 1-D and 3DA evolution equations, are solved, including the simulation results reported in this paper. Investigation from 3DA simulations of the functional dependence of  $\hat {c}_0$ upon the set of parameters governing the problem is left as an open problem.
$\hat {c}_0$ upon the set of parameters governing the problem is left as an open problem.
6. Conclusions
In this paper, we have examined the capillary thinning and pinch-off of surfactant-covered Newtonian jets when surfactant convection is dominant over surfactant diffusion, viz.  $Pe \gg 1$, along the interface. The dynamics close to the space–time pinch-off singularity has been analysed theoretically in the limit of
$Pe \gg 1$, along the interface. The dynamics close to the space–time pinch-off singularity has been analysed theoretically in the limit of  $Pe = \infty$ and by simulation. In the theoretical approach, advantage has been taken of the fact that jet profiles in the vicinity of the pinch-off singularity are slender and hence a set of 1-D slender-jet equations have been used to probe the fluid dynamics. In the theoretical approach, the separation of length and time scales near the singularity from those in the bulk of the jet has been exploited to obtain self-similar solutions for the jet profile
$Pe = \infty$ and by simulation. In the theoretical approach, advantage has been taken of the fact that jet profiles in the vicinity of the pinch-off singularity are slender and hence a set of 1-D slender-jet equations have been used to probe the fluid dynamics. In the theoretical approach, the separation of length and time scales near the singularity from those in the bulk of the jet has been exploited to obtain self-similar solutions for the jet profile  $h \equiv \tilde {h}/l_{\mu }$, surfactant concentration
$h \equiv \tilde {h}/l_{\mu }$, surfactant concentration  $\varGamma \equiv \tilde {\varGamma }/\varGamma _p$ and axial velocity
$\varGamma \equiv \tilde {\varGamma }/\varGamma _p$ and axial velocity  $v' \equiv \tilde {v}'/(\sigma _p/\mu )$. As such, the asymptotic solutions presented in this paper are the counterparts of Eggers's inertial–viscous solution (Eggers Reference Eggers1993) for jets with clean interfaces.
$v' \equiv \tilde {v}'/(\sigma _p/\mu )$. As such, the asymptotic solutions presented in this paper are the counterparts of Eggers's inertial–viscous solution (Eggers Reference Eggers1993) for jets with clean interfaces.
In the absence as well as the presence of surface rheological effects, the similarity solutions have been shown to have a scaling form in which the dependence of jet radius  $h$, surfactant concentration
$h$, surfactant concentration  $\varGamma$, axial length
$\varGamma$, axial length  $z'$ and axial velocity
$z'$ and axial velocity  $v'$ on time remaining until pinch-off
$v'$ on time remaining until pinch-off  $\tau$ have power-law dependencies that are governed by universal scaling exponents, viz.
$\tau$ have power-law dependencies that are governed by universal scaling exponents, viz.
 \begin{equation} h \sim \tau, \quad \varGamma \sim \tau, \quad z' \sim \tau ^{1/2}, \quad v' \sim \tau ^{-1/2} . \end{equation}
\begin{equation} h \sim \tau, \quad \varGamma \sim \tau, \quad z' \sim \tau ^{1/2}, \quad v' \sim \tau ^{-1/2} . \end{equation}
In the absence of surface rheological effects, as  $\tau \to 0$, the jet thins as if surfactants are not present and the expression relating jet radius, and hence the minimum neck radius
$\tau \to 0$, the jet thins as if surfactants are not present and the expression relating jet radius, and hence the minimum neck radius  $h_{min}$, to
$h_{min}$, to  $\tau$ is identical to that obtained by Eggers (Reference Eggers1993). In this case, the surfactant concentration at the location where jet radius is a minimum
$\tau$ is identical to that obtained by Eggers (Reference Eggers1993). In this case, the surfactant concentration at the location where jet radius is a minimum  $\varGamma _{min}$ is proportional to
$\varGamma _{min}$ is proportional to  $h_{min}$. Moreover, in this case while the asymptotic variation of
$h_{min}$. Moreover, in this case while the asymptotic variation of  $h_{min}$ with
$h_{min}$ with  $\tau$ is independent of initial conditions, these conditions do enter the asymptotic relation between
$\tau$ is independent of initial conditions, these conditions do enter the asymptotic relation between  $\varGamma _{min}$ and
$\varGamma _{min}$ and  $\tau$.
$\tau$.
In the presence of surface rheological effects, the power-law scalings are unchanged and  $h$,
$h$,  $\varGamma$,
$\varGamma$,  $z'$ and
$z'$ and  $v'$ scale with time measured from pinch-off
$v'$ scale with time measured from pinch-off  $\tau$ as in (6.1a–d). In this case, however, the asymptotic rate of thinning is reduced by a factor proportional to the ratio of surface to bulk viscous stresses at the onset of the asymptotic thinning regime.
$\tau$ as in (6.1a–d). In this case, however, the asymptotic rate of thinning is reduced by a factor proportional to the ratio of surface to bulk viscous stresses at the onset of the asymptotic thinning regime.
In the absence of surface rheological effects, inertial, capillary and bulk viscous forces balance as the jet tends toward pinch-off. In the presence of surface rheological effects, however, inertial, capillary, bulk viscous and surface viscous forces balance as the jet nears pinch-off. In both cases, Marangoni stresses do not contribute to the dominant balance of forces near pinch-off. Also in both cases,  $h_{min} \sim \varGamma _{min} \sim \tau$ and the ratio of
$h_{min} \sim \varGamma _{min} \sim \tau$ and the ratio of  $\varGamma _{min}$ to
$\varGamma _{min}$ to  $h_{min}$ remains constant as
$h_{min}$ remains constant as  $\tau \to 0$. A remarkable but counterintuitive feature of the physics when surface rheological effects are present is that surface viscosities can be important even when surfactants are swept away from the pinching zone and, consequently, surface viscosities vanish. This observation, however, can be readily rationalized because the ratio of the jet's surface area to its volume near the pinch point scales as
$\tau \to 0$. A remarkable but counterintuitive feature of the physics when surface rheological effects are present is that surface viscosities can be important even when surfactants are swept away from the pinching zone and, consequently, surface viscosities vanish. This observation, however, can be readily rationalized because the ratio of the jet's surface area to its volume near the pinch point scales as  $1/h_{min}$ which grows without bound as the jet's minimum radius
$1/h_{min}$ which grows without bound as the jet's minimum radius  $h_{min}$ tends to zero. Since the thinning rate is a function of the surface viscosity and Marangoni stresses are negligible as pinch-off is approached, the results presented in this study on jet breakup can be used to develop a feasible and robust probeless method for measuring surface viscosity.
$h_{min}$ tends to zero. Since the thinning rate is a function of the surface viscosity and Marangoni stresses are negligible as pinch-off is approached, the results presented in this study on jet breakup can be used to develop a feasible and robust probeless method for measuring surface viscosity.
Pioneering studies of pinch-off of liquid jets of pure Newtonian fluids had uncovered the existence of three scaling regimes of breakup: an inertial–viscous regime where capillary, inertial and viscous forces balance (Eggers Reference Eggers1993), a viscous regime where capillary and viscous forces balance (Papageorgiou Reference Papageorgiou1995) and an inertial regime where capillary and inertial forces balance (Chen & Steen Reference Chen and Steen1997; Day, Hinch & Lister Reference Day, Hinch and Lister1998). In the aftermath of the discovery of scaling laws governing pinch-off of jets with clean interfaces, it was realized that the viscous and inertial regimes can only be initial regimes of capillary thinning for slightly and highly viscous fluids and that the asymptotic regime of pinch-off must always involve all three forces (Lister & Stone Reference Lister and Stone1998; Basaran Reference Basaran2002; Eggers Reference Eggers2005). In other words, when  $Oh \ll 1$, a jet must undergo a transition from the inertial to the inertial–viscous regime as
$Oh \ll 1$, a jet must undergo a transition from the inertial to the inertial–viscous regime as  $\tau \to 0$. Similarly, when
$\tau \to 0$. Similarly, when  $Oh \gg 1$, a jet must undergo a transition from the viscous to the inertial–viscous regime as
$Oh \gg 1$, a jet must undergo a transition from the viscous to the inertial–viscous regime as  $\tau \to 0$. A jet of
$\tau \to 0$. A jet of  $Oh \approx 1$ can, however, remain in the inertial–viscous regime all the way until breakup. Subsequently, it was shown that the fluid dynamics of capillary thinning is in fact much more complicated than these earlier studies had implied (Castrejón-Pita et al. Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015; Li & Sprittles Reference Li and Sprittles2016). Indeed, a jet of
$Oh \approx 1$ can, however, remain in the inertial–viscous regime all the way until breakup. Subsequently, it was shown that the fluid dynamics of capillary thinning is in fact much more complicated than these earlier studies had implied (Castrejón-Pita et al. Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015; Li & Sprittles Reference Li and Sprittles2016). Indeed, a jet of  $Oh \ll 1$ can undergo a transition from an initial inertial regime to an intermediate viscous regime and then eventually transition to the inertial–viscous regime as the jet tends toward pinch-off. By contrast, a jet of
$Oh \ll 1$ can undergo a transition from an initial inertial regime to an intermediate viscous regime and then eventually transition to the inertial–viscous regime as the jet tends toward pinch-off. By contrast, a jet of  $Oh \gg 1$ can undergo transitions from an initial viscous to an intermediate inertial regime and then transition back to a second intermediate viscous regime before finally transitioning to the final inertial–viscous regime as
$Oh \gg 1$ can undergo transitions from an initial viscous to an intermediate inertial regime and then transition back to a second intermediate viscous regime before finally transitioning to the final inertial–viscous regime as  $\tau \to 0$. The existence of multiple intermediate or transient scaling regimes has already been demonstrated for surfactant-covered jets in the absence of surface rheological effects (Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018). A short foray into the existence of such complexity is presented in this paper in figure 6. A fruitful avenue of future research would entail a more detailed examination of this complexity and transitions between different scaling regimes through 3DA simulations and experiments. This promising avenue of research is left as an open problem in fluid mechanics of capillary pinch-off. Another fascinating extension of the present study that would have far reaching practical implications would involve examination of the role of surface viscous stresses in determining drop sizes and drop size distributions in fields as diverse as ink jet printing (Basaran et al. Reference Basaran, Gao and Bhat2013; Castrejon-Pita et al. Reference Castrejon-Pita, Baxter, Morgan, Temple, Martin and Hutchings2013) and sprays and/or atomization (Hilz & Vermeer Reference Hilz and Vermeer2013; Kooij et al. Reference Kooij, Sijs, Denn, Villermaux and Bonn2018).
$\tau \to 0$. The existence of multiple intermediate or transient scaling regimes has already been demonstrated for surfactant-covered jets in the absence of surface rheological effects (Kamat et al. Reference Kamat, Wagoner, Thete and Basaran2018). A short foray into the existence of such complexity is presented in this paper in figure 6. A fruitful avenue of future research would entail a more detailed examination of this complexity and transitions between different scaling regimes through 3DA simulations and experiments. This promising avenue of research is left as an open problem in fluid mechanics of capillary pinch-off. Another fascinating extension of the present study that would have far reaching practical implications would involve examination of the role of surface viscous stresses in determining drop sizes and drop size distributions in fields as diverse as ink jet printing (Basaran et al. Reference Basaran, Gao and Bhat2013; Castrejon-Pita et al. Reference Castrejon-Pita, Baxter, Morgan, Temple, Martin and Hutchings2013) and sprays and/or atomization (Hilz & Vermeer Reference Hilz and Vermeer2013; Kooij et al. Reference Kooij, Sijs, Denn, Villermaux and Bonn2018).
Acknowledgements
The authors thank the Purdue Process Safety and Assurance Center (P2SAC) for financial support.
Declaration of interests
The authors report no conflict of interest.
Appendix A. General constitutive equation for surface viscosity
Rather than assuming the linear relation that  $B_s = B_{s0}\hat {\varGamma }/\hat {\varGamma }_0$, one can take
$B_s = B_{s0}\hat {\varGamma }/\hat {\varGamma }_0$, one can take  $B_s = B_{s0} \,f(\hat {\varGamma })$ where the function
$B_s = B_{s0} \,f(\hat {\varGamma })$ where the function  $f$ is such that
$f$ is such that  $f(\hat {\varGamma }_0)=1$ and
$f(\hat {\varGamma }_0)=1$ and  $f(0)=0$. A Taylor series expansion of
$f(0)=0$. A Taylor series expansion of  $f(\hat {\varGamma })$ about
$f(\hat {\varGamma })$ about  $\hat {\varGamma }=0$ then reveals that
$\hat {\varGamma }=0$ then reveals that
 \begin{equation} f(\hat{\varGamma}) = f(0) + \left . \frac{\textrm{d}f}{\textrm{d}\hat{\varGamma}} \right|_{\hat{\varGamma} = 0} \hat{\varGamma} + O(\hat{\varGamma} ^2) = f'(0) \hat{\varGamma} + \ldots . \end{equation}
\begin{equation} f(\hat{\varGamma}) = f(0) + \left . \frac{\textrm{d}f}{\textrm{d}\hat{\varGamma}} \right|_{\hat{\varGamma} = 0} \hat{\varGamma} + O(\hat{\varGamma} ^2) = f'(0) \hat{\varGamma} + \ldots . \end{equation}
Thus,  $B_s = B_{s0}\, f'(0) \hat {\varGamma }$ as
$B_s = B_{s0}\, f'(0) \hat {\varGamma }$ as  $\hat {\varGamma } \to 0$ in the pinching region. Hence, the generalization of the results given earlier but now without any dependence whatsoever on a particular constitutive relation can be obtained by replacing
$\hat {\varGamma } \to 0$ in the pinching region. Hence, the generalization of the results given earlier but now without any dependence whatsoever on a particular constitutive relation can be obtained by replacing  $B_{s0}/\hat {\varGamma }_0$ by
$B_{s0}/\hat {\varGamma }_0$ by  $B_{s0} \,f'(0)$ in those formulae. Consequently, the generalization of (5.4) then becomes
$B_{s0} \,f'(0)$ in those formulae. Consequently, the generalization of (5.4) then becomes
 \begin{equation} \hat{h}_{min} =\frac{0.0304}{Oh \left ( 1+\dfrac{5B_{s0}\,f'(0)\hat{c}_0}{3} \right ) }\hat{\tau}, \end{equation}
\begin{equation} \hat{h}_{min} =\frac{0.0304}{Oh \left ( 1+\dfrac{5B_{s0}\,f'(0)\hat{c}_0}{3} \right ) }\hat{\tau}, \end{equation}
where  $5B_{s0}\,f'(0)\hat {c}_0/3$ represents the relative importance of surface viscous force to its bulk counterpart to leading order as
$5B_{s0}\,f'(0)\hat {c}_0/3$ represents the relative importance of surface viscous force to its bulk counterpart to leading order as  $\tau \to 0$.
$\tau \to 0$.
In order to show how (A 2) is applied, we take the Boussinesq–Scriven number to vary linearly with surface pressure  $\tilde {\varPi }=\sigma _p-\tilde {\sigma }$, viz.
$\tilde {\varPi }=\sigma _p-\tilde {\sigma }$, viz.  $B_s=B_{s0}\varPi /\varPi _0$, where
$B_s=B_{s0}\varPi /\varPi _0$, where  $\varPi _0$ is the surface pressure at
$\varPi _0$ is the surface pressure at  $\hat {\varGamma }=\hat {\varGamma }_0$. In this example,
$\hat {\varGamma }=\hat {\varGamma }_0$. In this example,  $f(\hat {\varGamma })=\varPi /\varPi _0$ and
$f(\hat {\varGamma })=\varPi /\varPi _0$ and  $f'(0)=-1 / \ln (1-\hat {\varGamma }_0)$ where
$f'(0)=-1 / \ln (1-\hat {\varGamma }_0)$ where  $f'(0)$ has been obtained from the Szyszkowski equation of state. As shown in figure 8, scaling exponents for minimum jet radius, axial length, axial velocity and surfactant concentration at the location where jet radius is minimum obtained from 3DA simulations by using a nonlinear constitutive equation for surface viscosity perfectly match the theoretical predictions reported earlier in which surface viscosity is assumed to vary linearly with surfactant concentration. Therefore, even when a nonlinear constitutive equation is used, asymptotically inertial, bulk viscous, surface viscous and capillary forces balance but Marangoni force is subdominant, and the rate of filament thinning, while it deviates from Eggers’ scaling law for clean interfaces, proceeds according to (A 2).
$f'(0)$ has been obtained from the Szyszkowski equation of state. As shown in figure 8, scaling exponents for minimum jet radius, axial length, axial velocity and surfactant concentration at the location where jet radius is minimum obtained from 3DA simulations by using a nonlinear constitutive equation for surface viscosity perfectly match the theoretical predictions reported earlier in which surface viscosity is assumed to vary linearly with surfactant concentration. Therefore, even when a nonlinear constitutive equation is used, asymptotically inertial, bulk viscous, surface viscous and capillary forces balance but Marangoni force is subdominant, and the rate of filament thinning, while it deviates from Eggers’ scaling law for clean interfaces, proceeds according to (A 2).

Figure 8. Results obtained from 3DA simulations using a nonlinear constitutive equation for surface viscosity: computed variation with  $\hat {\tau }$ of
$\hat {\tau }$ of  $\hat {h}_{min}$ (green square
$\hat {h}_{min}$ (green square  $\square$ symbols),
$\square$ symbols),  $\hat {z}' \equiv \hat {z}_{1.09\hat {h}_{min}}-\hat {z}_{min}$ (orange diamond
$\hat {z}' \equiv \hat {z}_{1.09\hat {h}_{min}}-\hat {z}_{min}$ (orange diamond  $\diamond$ symbols),
$\diamond$ symbols),  $\hat {v}' \equiv \hat {v}'_{1.09\hat {h}_{min}}$ (red circle
$\hat {v}' \equiv \hat {v}'_{1.09\hat {h}_{min}}$ (red circle  $\circ$ symbols) and
$\circ$ symbols) and  $\hat {\varGamma }_{min}$ (blue triangle
$\hat {\varGamma }_{min}$ (blue triangle  $\triangle$ symbols) for a jet of
$\triangle$ symbols) for a jet of  $Oh=0.07$,
$Oh=0.07$,  $Pe=1000$,
$Pe=1000$,  $\beta =0.3$,
$\beta =0.3$,  $\hat {\varGamma }_0=0.55$ and
$\hat {\varGamma }_0=0.55$ and  $B_{s0}=0.0143$. The solid black lines that are superimposed on the simulation results for
$B_{s0}=0.0143$. The solid black lines that are superimposed on the simulation results for  $\hat {\varGamma }_{min}$,
$\hat {\varGamma }_{min}$,  $\hat {z}'$ and
$\hat {z}'$ and  $\hat {v}'$ as
$\hat {v}'$ as  $\hat {\tau } \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. Inset: zoomed-in view of
$\hat {\tau } \to 0$ correspond to theoretical scaling results and for which the indicated slopes are the power-law exponents predicted from theory. Inset: zoomed-in view of  $\hat {h}_{min}$ and
$\hat {h}_{min}$ and  $\hat {\varGamma }_{min}$ versus
$\hat {\varGamma }_{min}$ versus  $\hat {\tau }$ as
$\hat {\tau }$ as  $\hat {\tau } \to 0$. Eggers’ solution,
$\hat {\tau } \to 0$. Eggers’ solution,  $\hat {h}=0.0304\hat {\tau }/Oh$, is denoted by the pink dotted line. The new scaling law,
$\hat {h}=0.0304\hat {\tau }/Oh$, is denoted by the pink dotted line. The new scaling law,  $\hat {h}=[0.0304/Oh(1+5B_{s0}\,f'(0)\hat {c}_0/3)]\hat {\tau }$, where
$\hat {h}=[0.0304/Oh(1+5B_{s0}\,f'(0)\hat {c}_0/3)]\hat {\tau }$, where  $\hat {c}_0 \equiv \lim _{\hat {\tau } \to 0} \hat {\varGamma }_{min}/\hat {h}_{min}$, is denoted by the dashed black line.
$\hat {c}_0 \equiv \lim _{\hat {\tau } \to 0} \hat {\varGamma }_{min}/\hat {h}_{min}$, is denoted by the dashed black line.
Appendix B. Initial surfactant concentration profile
The 1-D mass balance (2.9) and 1-D convection–diffusion (2.10) are subjected to the same homogeneous Neumann boundary conditions at the two ends of the domain. Moreover, in the limit as Péclet number  $Pe$ or the relative importance of convection to diffusion grows without bound, the 1-D mass balance equation (2.9) and 1-D convection–diffusion equation (2.10) become identical in form
$Pe$ or the relative importance of convection to diffusion grows without bound, the 1-D mass balance equation (2.9) and 1-D convection–diffusion equation (2.10) become identical in form
 \begin{equation} \frac{\partial h}{\partial t}+v\frac{\partial h}{\partial z}+\frac{h}{2}\frac{\partial v}{\partial z}=0, \quad \frac{\partial \varGamma }{\partial t}+v\frac{\partial \varGamma }{\partial z}+\frac{\varGamma}{2}\frac{\partial v}{\partial z}=0 . \end{equation}
\begin{equation} \frac{\partial h}{\partial t}+v\frac{\partial h}{\partial z}+\frac{h}{2}\frac{\partial v}{\partial z}=0, \quad \frac{\partial \varGamma }{\partial t}+v\frac{\partial \varGamma }{\partial z}+\frac{\varGamma}{2}\frac{\partial v}{\partial z}=0 . \end{equation}(In this appendix, we omit the tildes from all variables for simplicity.) If we then write
 \begin{equation} \varGamma (z,t) = c(z,t) \, h(z,t), \end{equation}
\begin{equation} \varGamma (z,t) = c(z,t) \, h(z,t), \end{equation}and substitute the previous product solution into either of the two equations in (B 1), it is found that
 \begin{equation} \frac{\textrm{D}c}{\textrm{D}t} = \frac{\partial c}{\partial t}+v\frac{\partial c}{\partial z} = 0. \end{equation}
\begin{equation} \frac{\textrm{D}c}{\textrm{D}t} = \frac{\partial c}{\partial t}+v\frac{\partial c}{\partial z} = 0. \end{equation}
The initial condition on the jet radius,  $h(z,0)$, is such that it corresponds to a sinusoidal deformation of the interface (2.1). If we take the initial condition on the surfactant concentration,
$h(z,0)$, is such that it corresponds to a sinusoidal deformation of the interface (2.1). If we take the initial condition on the surfactant concentration,  $\varGamma (z,0)$, to be of the same functional form such that
$\varGamma (z,0)$, to be of the same functional form such that  $\varGamma (z,0) = c_0 h(z,0)$, where
$\varGamma (z,0) = c_0 h(z,0)$, where  $c_0$ is a constant, it then follows from (B 3) that
$c_0$ is a constant, it then follows from (B 3) that  $c(z,t) = c_0$ for all time. The correctness of this statement is also confirmed by results of direct numerical simulations that are shown in figure 9(a). Thus, in this situation,
$c(z,t) = c_0$ for all time. The correctness of this statement is also confirmed by results of direct numerical simulations that are shown in figure 9(a). Thus, in this situation,  $\varGamma (z,t) = c_0 h(z,t)$, a result that is used in the asymptotic analyses carried out in the paper.
$\varGamma (z,t) = c_0 h(z,t)$, a result that is used in the asymptotic analyses carried out in the paper.

Figure 9. Time evolution of  $c(z,t)$ for jets of
$c(z,t)$ for jets of  $Pe=\infty$,
$Pe=\infty$,  $\varGamma _m=0.3$,
$\varGamma _m=0.3$,  $\lambda = 8$ and
$\lambda = 8$ and  $h_0=0.9$ subjected to different initial conditions on surfactant concentration. (a) Surfactant concentration is initially taken to be proportional to the initial shape profile
$h_0=0.9$ subjected to different initial conditions on surfactant concentration. (a) Surfactant concentration is initially taken to be proportional to the initial shape profile  $h(z,t=0)$, viz.
$h(z,t=0)$, viz.  $\varGamma (z,t=0)=c_0h(z,t=0)$. Here,
$\varGamma (z,t=0)=c_0h(z,t=0)$. Here,  $c_0=0.15$. Because
$c_0=0.15$. Because  $\textrm {D}c/\textrm {D}t=0$,
$\textrm {D}c/\textrm {D}t=0$,  $c(z,t)$ must be spatially uniform and temporally constant for all time, viz.
$c(z,t)$ must be spatially uniform and temporally constant for all time, viz.  $c(z,t) \equiv c_0$. Thus profiles of
$c(z,t) \equiv c_0$. Thus profiles of  $c(z,t)$ at different times determined from direct numerical simulations collapse onto one flat line,
$c(z,t)$ at different times determined from direct numerical simulations collapse onto one flat line,  $c=c_0=0.15$, as shown in the figure. (b) The jet is initially uniformly coated with surfactant at concentration
$c=c_0=0.15$, as shown in the figure. (b) The jet is initially uniformly coated with surfactant at concentration  $\varGamma _0=0.15$. The different curves show the evolution in time of
$\varGamma _0=0.15$. The different curves show the evolution in time of  $c(z,t)$ and highlight the growing size of the axial extent where the profile of
$c(z,t)$ and highlight the growing size of the axial extent where the profile of  $c$ is flat. Inset: variation of the computed value of
$c$ is flat. Inset: variation of the computed value of  $c(z=z_{min},t)$ (denoted by diamond
$c(z=z_{min},t)$ (denoted by diamond  $\diamond$ symbols) with
$\diamond$ symbols) with  $z_{min}$ where
$z_{min}$ where  $z_{min}$ denotes the axial location where the thread radius is minimum. The green flat line in the inset corresponds to
$z_{min}$ denotes the axial location where the thread radius is minimum. The green flat line in the inset corresponds to  $\varGamma _0/h_0$, which clearly shows
$\varGamma _0/h_0$, which clearly shows  $\lim _{\tau \to 0} \varGamma _{min}/h_{min}=\varGamma _0/h_0$. The red arrows in both the main figure and the inset indicate the direction of increasing time.
$\lim _{\tau \to 0} \varGamma _{min}/h_{min}=\varGamma _0/h_0$. The red arrows in both the main figure and the inset indicate the direction of increasing time.
It is also common in computational studies to impose the initial condition that the surfactant concentration is initially uniform, viz.  $\varGamma (z,0)=\varGamma _0=$ constant, albeit the fact that the interface is deformed at that instant. In this case,
$\varGamma (z,0)=\varGamma _0=$ constant, albeit the fact that the interface is deformed at that instant. In this case,  $c(z,t)$ is no longer spatially uniform and temporally constant but instead evolves according to
$c(z,t)$ is no longer spatially uniform and temporally constant but instead evolves according to  $\textrm {D}c/\textrm {D}t=0$. Thus, because the material derivative of
$\textrm {D}c/\textrm {D}t=0$. Thus, because the material derivative of  $c$ is zero, the value of
$c$ is zero, the value of  $c$ remains constant following the motion of any material point. Since
$c$ remains constant following the motion of any material point. Since  $c(z,t=0)$ is continuous over
$c(z,t=0)$ is continuous over  $z \in [0,L]$, where
$z \in [0,L]$, where  $L \equiv \lambda /2 = {\rm \pi}/k$,
$L \equiv \lambda /2 = {\rm \pi}/k$,  $c(z,t=0)$ is bounded with
$c(z,t=0)$ is bounded with  $c(0,t=0) \le c(z,t=0) \le c(L,t=0)$, viz.
$c(0,t=0) \le c(z,t=0) \le c(L,t=0)$, viz.  $c(0,0) \le c(z,0) \le c(L,0)$, because
$c(0,0) \le c(z,0) \le c(L,0)$, because  $h(0,0) \ge h(z,0) \ge h(L,0)$. Realization of boundedness and the imposed initial conditions on
$h(0,0) \ge h(z,0) \ge h(L,0)$. Realization of boundedness and the imposed initial conditions on  $\varGamma (z,t)$ and
$\varGamma (z,t)$ and  $h(z,t)$ and the equation governing
$h(z,t)$ and the equation governing  $c(z,t)$ reveals that
$c(z,t)$ reveals that  $c(0,0) \le c(z,t) \le c(L,0)$. At early times, the minimum in the jet radius is located at
$c(0,0) \le c(z,t) \le c(L,0)$. At early times, the minimum in the jet radius is located at  $z=L$. As the jet continues to thin, the fluid accelerates as it flows from the neck, where pressure is highest, toward the swell (
$z=L$. As the jet continues to thin, the fluid accelerates as it flows from the neck, where pressure is highest, toward the swell ( $z=0$), where pressure is lowest. Consequently,
$z=0$), where pressure is lowest. Consequently,  $v<0$ for
$v<0$ for  $z \in (0,L)$ at early times. Since the imposed initial conditions on
$z \in (0,L)$ at early times. Since the imposed initial conditions on  $h$ and
$h$ and  $\varGamma$ give rise to positive
$\varGamma$ give rise to positive  $\partial c/\partial z$,
$\partial c/\partial z$,  $c$ must increase as
$c$ must increase as  ${\partial c/\partial t=-v \, \partial c/\partial z>0}$. Since
${\partial c/\partial t=-v \, \partial c/\partial z>0}$. Since  $c(z,t)$ is bounded, its value anywhere can at most rise to its maximum value at the initial instant,
$c(z,t)$ is bounded, its value anywhere can at most rise to its maximum value at the initial instant,  $c(L,0)=\varGamma _0/h_0$. Once the local value of
$c(L,0)=\varGamma _0/h_0$. Once the local value of  $c$ reaches its maximum value, the value of
$c$ reaches its maximum value, the value of  $c$ there is maintained to be
$c$ there is maintained to be  $c(L,0)$ for all time as
$c(L,0)$ for all time as  $c(z,t)$ develops flat profile over values of
$c(z,t)$ develops flat profile over values of  $z$ where
$z$ where  $c(z,t)=c(L,0)$. Because of inertia, the location of minimum neck radius migrates from the end of the domain (
$c(z,t)=c(L,0)$. Because of inertia, the location of minimum neck radius migrates from the end of the domain ( $z=L$) to its interior (Eggers Reference Eggers1993; Castrejón-Pita et al. Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015). As shown by Castrejón-Pita et al. (Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015), the occurrence of this new axial location
$z=L$) to its interior (Eggers Reference Eggers1993; Castrejón-Pita et al. Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015). As shown by Castrejón-Pita et al. (Reference Castrejón-Pita, Castrejón-Pita, Thete, Sambath, Hutchings, Hinch, Lister and Basaran2015), the occurrence of this new axial location  $0 \ll z < L$ for the minimum value of jet radius gives rise to a new stagnation zone in the vicinity of which the flow has slowed down considerably and even reversed. At first sight, it might seem that
$0 \ll z < L$ for the minimum value of jet radius gives rise to a new stagnation zone in the vicinity of which the flow has slowed down considerably and even reversed. At first sight, it might seem that  $c(z,t)$ can decrease from its maximum value over the region where flow is reversed (
$c(z,t)$ can decrease from its maximum value over the region where flow is reversed ( $v>0$). However, because
$v>0$). However, because  $\partial c/\partial z=0$ over this region,
$\partial c/\partial z=0$ over this region,  $c(z,t)$ remains fixed there equal to
$c(z,t)$ remains fixed there equal to  $c(L,0)$. Therefore, we expect that
$c(L,0)$. Therefore, we expect that  $c(z=z_{min},t)=c(L,0)=\varGamma _0/h_0$ for all time, where
$c(z=z_{min},t)=c(L,0)=\varGamma _0/h_0$ for all time, where  $z_{min}$ is the location where thread radius is minimum. The correctness of this assertion has been confirmed by direct numerical simulations. One example of such a simulation-based confirmation is shown in the inset to figure 9(b).
$z_{min}$ is the location where thread radius is minimum. The correctness of this assertion has been confirmed by direct numerical simulations. One example of such a simulation-based confirmation is shown in the inset to figure 9(b).

































































































































































