



1 Introduction
In an ecological environment, various infectious diseases in human or animals occur frequently (see [26]). The current global COVID-19 pandemic is one such an example. Other recent examples include epidemics caused by HIV, Cholera and Zika viruses. Scientists often use the well-known Susceptibility–Infection–Recovery (SIR) model ([Reference Kermack and McKendrick13]) to describe how a virus spreads and evolves in future. The SIR model and its various extensions have been studied by many scientists (see [Reference Anderson and May1, Reference Kuznetsov and Piccardi15, Reference Li and Graef17, Reference May and Anderson21, Reference Shuai and van den Driessche24, Reference Thieme27, Reference van de Driessche and Watmough31], e.g.). A good review for the model written by Hethcote in 2000 can be seen in [Reference Hethcote11]. The most of these studies focus on understanding the complicated dynamics of interaction between different hosts and viruses. However, this SIR model and its extensions cannot include the mobility of human hosts around different geographical regions. In order to take the movement of human hosts into consideration, one must develop a new mathematical model which can reflect these factors (see [Reference Eisenberg, Shuai, Tien and van den Driessche9, Reference Lou and Ni20, Reference Yin, Chen and Wang37]). Towards this goal, considerable progress has been made for different types of infectious diseases. In particular, many researchers have studied the mathematical model for the epidemic caused by the Cholera virus (see [Reference Andrew and Basu2, Reference Li and Graef17, Reference Liao and Wang18, Reference Thieme27, Reference Tian and Wang28, Reference van de Driessche and Watmough31, Reference Wang and Wang32, Reference Yamazaki and Wang33, Reference Yamazaki and Wang34], etc.).
In this paper, we consider the mathematical model for the cholera epidemic with diffusion processes. A novel feature for the model is that there is no lifetime immunity. This leads to a coupled reaction–diffusion system with different diffusion coefficients. We begin by describing the model system recently studied in [Reference Tian and Wang28, Reference Wang and Wang32, Reference Yamazaki and Wang34, Reference Yamazaki35].
Let
 $\Omega$
be a bounded domain in
$\Omega$
be a bounded domain in
 $R^n$
with
$R^n$
with
 $C^2$
-boundary
$C^2$
-boundary
 $\partial \Omega$
. Let
$\partial \Omega$
. Let
 $Q_T=\Omega \times (0,T]$
for any
$Q_T=\Omega \times (0,T]$
for any
 $T>0$
. When
$T>0$
. When
 $T=\infty$
, we denote
$T=\infty$
, we denote
 $Q_{\infty}$
by Q. Let S(x,t), I(x,t) and R(x,t) represent, respectively, susceptible, infected and recovered human hosts. Let B(x,t) be the concentration of bacteria. Then, by the population growth and the conservation laws, we see that S,I,R and B satisfy the following reaction–diffusion system in
$Q_{\infty}$
by Q. Let S(x,t), I(x,t) and R(x,t) represent, respectively, susceptible, infected and recovered human hosts. Let B(x,t) be the concentration of bacteria. Then, by the population growth and the conservation laws, we see that S,I,R and B satisfy the following reaction–diffusion system in
 $Q_T$
(see [9, 11, 27]):
$Q_T$
(see [9, 11, 27]):
 \begin{eqnarray} S_t-\nabla[d_1(x,t)\nabla S] & = & b(x,t)-\beta_1SI-\beta_2S \cdot h(B)-dS+\sigma R,\end{eqnarray}
\begin{eqnarray} S_t-\nabla[d_1(x,t)\nabla S] & = & b(x,t)-\beta_1SI-\beta_2S \cdot h(B)-dS+\sigma R,\end{eqnarray}
 \begin{eqnarray} I_t-\nabla[d_2(x,t)\nabla I] & = & \beta_1SI+\beta_2S \cdot h(B)-(d+\gamma)I, \end{eqnarray}
\begin{eqnarray} I_t-\nabla[d_2(x,t)\nabla I] & = & \beta_1SI+\beta_2S \cdot h(B)-(d+\gamma)I, \end{eqnarray}
 \begin{eqnarray} R_t-\nabla[d_3(x,t)\nabla R] & = & \gamma I-(d+\sigma)R, \end{eqnarray}
\begin{eqnarray} R_t-\nabla[d_3(x,t)\nabla R] & = & \gamma I-(d+\sigma)R, \end{eqnarray}
 \begin{eqnarray} B_t-\nabla[d_4(x,t)\nabla B] & = & \xi I +gB(1-\frac{B}{K})-\delta B \end{eqnarray}
\begin{eqnarray} B_t-\nabla[d_4(x,t)\nabla B] & = & \xi I +gB(1-\frac{B}{K})-\delta B \end{eqnarray}
subject to the following initial and boundary conditions:
 \begin{eqnarray} & & (\nabla_{\nu}S,\nabla_{\nu}I,\nabla_{\nu}R, \nabla_{\nu}B) = 0,\qquad (x,t)\in \partial \Omega\times (0,T],\end{eqnarray}
\begin{eqnarray} & & (\nabla_{\nu}S,\nabla_{\nu}I,\nabla_{\nu}R, \nabla_{\nu}B) = 0,\qquad (x,t)\in \partial \Omega\times (0,T],\end{eqnarray}
 \begin{eqnarray} & & (S(x,0),I(x,0),R(x,0),B(x,0))=(S_0(x),I_0(x),R_0(x),B_0(x)), x\in \Omega, \end{eqnarray}
\begin{eqnarray} & & (S(x,0),I(x,0),R(x,0),B(x,0))=(S_0(x),I_0(x),R_0(x),B_0(x)), x\in \Omega, \end{eqnarray}
where
 $\nu$
represents the outward unit normal on
$\nu$
represents the outward unit normal on
 $\partial \Omega$
, h(B) is a differential function with
$\partial \Omega$
, h(B) is a differential function with
 \[ h(0)=0, 0\leq h(B)\leq 1.\]
\[ h(0)=0, 0\leq h(B)\leq 1.\]
A typical example used in [Reference Yamazaki and Wang34] for h(B) is
 \[ h(B)=\frac{B}{B+K}.\]
\[ h(B)=\frac{B}{B+K}.\]
For reference, we list various parameters in the model as in [Reference Eisenberg, Shuai, Tien and van den Driessche9, Reference Thieme27, Reference Wang and Wang32, Reference Yamazaki and Wang33]:
 \begin{eqnarray*} d & = & \mbox{ the natural death rate}\\ \gamma & = & \mbox{the recovery of infectious individuals}\\ b & = & \mbox{the influx of susceptible host}\\ \sigma & = & \mbox{the rate at which recovered individuals lose immunity}\\ \delta & = & \mbox{the natural death rate of bacteria}\\ \xi & = & \mbox{the shedding rate of bacteria by infectious human hosts},\\ d_i & = & \mbox{the diffusion coefficients, $i=1,2,3,4$},\\ K & = & \mbox{ the maximum capacity of the bacteria} \end{eqnarray*}
\begin{eqnarray*} d & = & \mbox{ the natural death rate}\\ \gamma & = & \mbox{the recovery of infectious individuals}\\ b & = & \mbox{the influx of susceptible host}\\ \sigma & = & \mbox{the rate at which recovered individuals lose immunity}\\ \delta & = & \mbox{the natural death rate of bacteria}\\ \xi & = & \mbox{the shedding rate of bacteria by infectious human hosts},\\ d_i & = & \mbox{the diffusion coefficients, $i=1,2,3,4$},\\ K & = & \mbox{ the maximum capacity of the bacteria} \end{eqnarray*}
All these parameters are positive. The interested readers may find the value range of those parameters from the website of the World Health Organization.
We would like to point out that the analysis for the reaction–diffusion system (1.1)–(1.4) is often difficult since there is no comparison principle ([Reference Lieberman19, Reference Pao23]). Some basic questions such as global existence and uniqueness for the system are extremely challenging since equations (2.1) and (2.2) contain some quadratic terms in the system ([Reference Caceres and Canizo5, Reference Caputo and Vasseur7, Reference Hu12]). Many of the quantitative properties are still open. For example, from the physical point of view, the concentration, S(x, t), I(x, t), R(x, t) and B(x, t) must be nonnegative and bounded in
 $Q_T$
. However, it appears that there has been no rigorous proof in the previous research when the space dimension is greater than 1. Answering these open questions is one of the motivations for this paper. Moreover, with different diffusion coefficients in a reaction–diffusion system, the dynamics of a solution may be very different from that of an ODE system. The most striking example is the Turing phenomenon in which the solution of an ODE system is stable, while the solution of the corresponding reaction–diffusion system is unstable when one diffusion coefficient is much larger than the other ([Reference Evans10]).
$Q_T$
. However, it appears that there has been no rigorous proof in the previous research when the space dimension is greater than 1. Answering these open questions is one of the motivations for this paper. Moreover, with different diffusion coefficients in a reaction–diffusion system, the dynamics of a solution may be very different from that of an ODE system. The most striking example is the Turing phenomenon in which the solution of an ODE system is stable, while the solution of the corresponding reaction–diffusion system is unstable when one diffusion coefficient is much larger than the other ([Reference Evans10]).
When the space dimension is equal to 1, the authors of [Reference Liao and Wang18, Reference Shuai and van den Driessche24, Reference Wang and Wang32, Reference Yamazaki and Wang34, Reference Yamazaki35] studied the system (1.1)–(1.6). The global well-posedness is established for the model. Moreover, some global dynamical analysis for the solution is carried out in these papers. However, when the spatial dimension n is greater than 1, the analysis becomes much more complicated. More recently, by using a dual argument, Klements–Morgan–Tang ([Reference Klements, Morgan and Tang14]) and Morgan–Tang ([Reference Morgan and Tang22]) obtained some interesting results for a class of reaction–diffusion system. Particularly, a global bound of the solution can be obtained if the coefficients are constants. The purpose of this paper is to study the reaction–diffusion system (1.1)–(1.6) when the space dimension is greater than 1 and the diffusion coefficients in the model for susceptible, infected and recovered human hosts are different. Furthermore, the diffusion coefficients in our model allow to depend on space and time, which are certainly more realistic than in the previous model. This fact is observed from the recent COVID-19 pandemic in which the mobility for infected patients is close to zero due to required global quarantine and travel restriction. It is also clear that for flu-like viruses, the rate of infection is much higher in the winter than in the summer.
In this paper, we establish a global existence and uniqueness result for any space dimension n. Particularly, we prove that the weak solution is actually classical as long as the initial data and coefficients are smooth. Hence, global well-posedness for the model problem (1.1)–(1.6) is established without any restriction on space dimension. Moreover, under a condition on some parameters, we are able to prove that the solution is uniformly bounded and converges to the steady-state solution (global attractor, see [Reference Temam25]) for any space dimension as time evolves. These results improve the previous research obtained by others where the well-posedness is proved when the space dimension is equal to 1 (see [Reference Shuai and van den Driessche24, Reference Yamazaki and Wang33, Reference Yamazaki and Wang34, Reference Yamazaki35]). The main idea for establishing global existence is to derive various a priori estimates (see [Reference Yin, Chen and Wang37]). Our analysis in this paper uses a lot of very delicate results for elliptic and parabolic equations ([Reference Ladyzenskaja, Solonikov and Uralceva16, Reference Lieberman19, Reference Yin36]). Particularly, we use a subtle form of Campanato–John–Nirenberg–Morrey space to obtain the regularity of weak solution ([Reference Yin36]). A uniform bound in Q for the solution is even more subtle, where a special form of Gagliardo–Nirenberg’s inequality is used. The global asymptotic analysis is based on accurate energy estimates for the solution of the system ([Reference Chadam and Yin8]). The method developed in this paper can also be used to deal with different epidemic models caused by some viruses such as avian influenza for birds ([Reference Vaidya, Wang and Zou30]).
The paper is organised as follows. In Section Section 2, we first recall some basic function spaces and then state the main results. In Section Section 3, we prove the first part of the main results on global solvability of the system (1.1)–(1.6) (Theorems 2.1 and 2.2). The long-time behaviour of the solution in the second part is proved in Section Section 4 (Theorems 2.3 and 2.4). In Section Section 5, we give some concluding remarks.
2 Notations and the statement of main results
For reader’s convenience, we recall some basic Sobolev spaces which are standard in dealing with elliptic and parabolic partial differential equations.
Let
 $\alpha\in (0,1)$
. We denote by
$\alpha\in (0,1)$
. We denote by
 $C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
the Hölder space in which every function is Hölder continuous with respect to (x,t) with exponent
$C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
the Hölder space in which every function is Hölder continuous with respect to (x,t) with exponent
 $(\alpha,\frac{\alpha}{2})$
in
$(\alpha,\frac{\alpha}{2})$
in
 $\bar{Q}_{T}$
.
$\bar{Q}_{T}$
.
Let
 $p>1$
and V be a Banach space with norm
$p>1$
and V be a Banach space with norm
 $||\cdot||_v$
, we denote
$||\cdot||_v$
, we denote
 \[ L^p(0,T; V)=\{ F(t): t\in [0,T]\rightarrow V: ||F||_{L^p(0,T;V)}<\infty\},\]
\[ L^p(0,T; V)=\{ F(t): t\in [0,T]\rightarrow V: ||F||_{L^p(0,T;V)}<\infty\},\]
equipped with norm
 \[ ||F||_{L^{p}(0,T;V)}=\left(\int_{0}^{T} ||F||_v^p dt\right)^{\frac{1}{p}}.\]
\[ ||F||_{L^{p}(0,T;V)}=\left(\int_{0}^{T} ||F||_v^p dt\right)^{\frac{1}{p}}.\]
When
 $V=L^{p}(\Omega)$
, we simply use
$V=L^{p}(\Omega)$
, we simply use
 \[ L^p(Q_{T})=L^{p}(0,T;L^{p}(\Omega)).\]
\[ L^p(Q_{T})=L^{p}(0,T;L^{p}(\Omega)).\]
Moreover, the
 $L^p(Q_{T})$
-norm is denoted by
$L^p(Q_{T})$
-norm is denoted by
 $||\cdot||_p$
and
$||\cdot||_p$
and
 $||\cdot||_{\infty}$
when
$||\cdot||_{\infty}$
when
 $p=\infty$
for simplicity.
$p=\infty$
for simplicity.
Sobolev spaces
 $W_{p}^{k}(\Omega)$
and
$W_{p}^{k}(\Omega)$
and
 $W_{p}^{k,\,l}(Q_{T})$
are defined the same as in the classical books such as [Reference Evans10] and [Reference Ladyzenskaja, Solonikov and Uralceva16].
$W_{p}^{k,\,l}(Q_{T})$
are defined the same as in the classical books such as [Reference Evans10] and [Reference Ladyzenskaja, Solonikov and Uralceva16].
Let
 $V_2(Q_T)=\{ u(x,t)\in C([0,T];W_{2}^{1}(\Omega)): ||u||_{V_{2}}<\infty\} $
equipped with the norm
$V_2(Q_T)=\{ u(x,t)\in C([0,T];W_{2}^{1}(\Omega)): ||u||_{V_{2}}<\infty\} $
equipped with the norm
 \[ ||u||_{V_{2}}=\sup_{0\leq t\leq T}||u||_{L^{2}(\Omega)}+\sum_{i=1}^{n}||u_{x_{i}}||_{2}.\]
\[ ||u||_{V_{2}}=\sup_{0\leq t\leq T}||u||_{L^{2}(\Omega)}+\sum_{i=1}^{n}||u_{x_{i}}||_{2}.\]
For any
 $\mu\in [0, n+2)$
, the Morrey–John–Nirenberg–Campanato space
$\mu\in [0, n+2)$
, the Morrey–John–Nirenberg–Campanato space
 $L^{2, \mu}(Q_{T})$
is defined as in [Reference Campanato6]. Particularly, when
$L^{2, \mu}(Q_{T})$
is defined as in [Reference Campanato6]. Particularly, when
 $\mu=0$
,
$\mu=0$
,
 \[ L^{2,0}(Q_{T})=L^2(Q_{T}),\]
\[ L^{2,0}(Q_{T})=L^2(Q_{T}),\]
and when
 $\mu\in (n, n+2)$
,
$\mu\in (n, n+2)$
,
 $L^{2, \mu}(Q_{T})$
is equivalent to the classical Hölder space
$L^{2, \mu}(Q_{T})$
is equivalent to the classical Hölder space
 $C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
with
$C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
with
 \[ \alpha= \frac{(n+2)-\mu}{2}.\]
\[ \alpha= \frac{(n+2)-\mu}{2}.\]
We first state the basic assumptions for the diffusion coefficients and known data. All other parameters in equations (1.1)–(1.4) are assumed to be positive automatically throughout this paper. We also choose
 $h(s)=\frac{s}{s+K}$
for simplicity.
$h(s)=\frac{s}{s+K}$
for simplicity.
H(2.1). Assume that
 $d_i(x,t)\in L^{\infty}(\Omega\times (0,\infty))$
for all i. There exist two positive constants
$d_i(x,t)\in L^{\infty}(\Omega\times (0,\infty))$
for all i. There exist two positive constants
 $d_0$
and
$d_0$
and
 $D_0$
such that
$D_0$
such that
 \[ 0<d_0\leq d_i(x,t)\leq D_0,\quad (x,t)\in Q_{T}.\]
\[ 0<d_0\leq d_i(x,t)\leq D_0,\quad (x,t)\in Q_{T}.\]
H(2.2). Assume that all initial data
 $S_0(x), I_0(x), R_0(x), B_0(x)$
are nonnegative on
$S_0(x), I_0(x), R_0(x), B_0(x)$
are nonnegative on
 $\Omega$
. Moreover,
$\Omega$
. Moreover,
 $U_0(x)=(S_0(x),I_0(x),R_0(x),B_0(x))\in L^{2}(\Omega)^4.$
$U_0(x)=(S_0(x),I_0(x),R_0(x),B_0(x))\in L^{2}(\Omega)^4.$
H(2.3). Let
 $0\leq b(x,t)\in L^{\infty}(Q)$
. Moreover,
$0\leq b(x,t)\in L^{\infty}(Q)$
. Moreover,
 \[ ||b||_{L^{\infty}(Q)}\leq b_0<\infty.\]
\[ ||b||_{L^{\infty}(Q)}\leq b_0<\infty.\]
For brevity, we set
 \[ u_1(x,t)=S(x,t), u_2(x,t)=I(x,t), u_3=R(x,t), u_4(x,t)=B(x,t), \, (x,t)\in Q. \]
\[ u_1(x,t)=S(x,t), u_2(x,t)=I(x,t), u_3=R(x,t), u_4(x,t)=B(x,t), \, (x,t)\in Q. \]
We use
 $U(x,t)=(u_1,u_2,u_3,u_4)$
to be a vector function defined in Q. The right-hand sides of the equations (1.1), (1.2), (1.3) and (1.4) are denoted by
$U(x,t)=(u_1,u_2,u_3,u_4)$
to be a vector function defined in Q. The right-hand sides of the equations (1.1), (1.2), (1.3) and (1.4) are denoted by
 $f_1(U),\, f_2(U),\, f_3(U),\, f_4(U)$
, respectively. For convenience, we use
$f_1(U),\, f_2(U),\, f_3(U),\, f_4(U)$
, respectively. For convenience, we use
 $f_1(U)$
instead of
$f_1(U)$
instead of
 $f_1(x,t,U)$
since
$f_1(x,t,U)$
since
 $f_1$
depends on x,t and U. With the new notation, the system (1.1)–(1.6) can be written as the following reaction–diffusion system:
$f_1$
depends on x,t and U. With the new notation, the system (1.1)–(1.6) can be written as the following reaction–diffusion system:
 \begin{eqnarray} & & u_{1t}-\nabla[d_1(x,t)\nabla u_1]=f_1(U),\quad (x,t)\in Q_{T},\end{eqnarray}
\begin{eqnarray} & & u_{1t}-\nabla[d_1(x,t)\nabla u_1]=f_1(U),\quad (x,t)\in Q_{T},\end{eqnarray}
 \begin{eqnarray} & & u_{2t}-\nabla[d_2(x,t)\nabla u_2]=f_2(U),\quad (x,t)\in Q_{T}, \end{eqnarray}
\begin{eqnarray} & & u_{2t}-\nabla[d_2(x,t)\nabla u_2]=f_2(U),\quad (x,t)\in Q_{T}, \end{eqnarray}
 \begin{eqnarray}& & u_{3t}-\nabla[d_3(x,t)\nabla u_3]=f_3(U),\quad (x,t)\in Q_{T},\end{eqnarray}
\begin{eqnarray}& & u_{3t}-\nabla[d_3(x,t)\nabla u_3]=f_3(U),\quad (x,t)\in Q_{T},\end{eqnarray}
 \begin{eqnarray} & & u_{4t}-\nabla[d_4(x,t)\nabla u_4]=f_4(U),\quad (x,t)\in Q_T, \end{eqnarray}
\begin{eqnarray} & & u_{4t}-\nabla[d_4(x,t)\nabla u_4]=f_4(U),\quad (x,t)\in Q_T, \end{eqnarray}
subject to the initial and boundary conditions:
 \begin{eqnarray} & & U(x,0)=U_0(x)=(S_0(x),I_0(x),R_0(x),B_0(x)),\quad x\in \Omega, \end{eqnarray}
\begin{eqnarray} & & U(x,0)=U_0(x)=(S_0(x),I_0(x),R_0(x),B_0(x)),\quad x\in \Omega, \end{eqnarray}
 \begin{eqnarray} & & \nabla_{\nu}U(x,t)=0,\quad (x,t)\in \partial \Omega\times (0,T]. \end{eqnarray}
\begin{eqnarray} & & \nabla_{\nu}U(x,t)=0,\quad (x,t)\in \partial \Omega\times (0,T]. \end{eqnarray}
We define a product space X equipped with the standard product norm:
 \[ X=L^{2}(0,T;W_{2}^{1}(\Omega))^{4}.\]
\[ X=L^{2}(0,T;W_{2}^{1}(\Omega))^{4}.\]
The conjugate dual space of X is denoted by
 $X^*$
.
$X^*$
.
Definition 2.1. We say U(x,t) is a weak solution to the problem (2.1)–(2.6) in
 $Q_{T}$
if
$Q_{T}$
if
 $U(x,t)\in X$
such that
$U(x,t)\in X$
such that
 \begin{eqnarray*} & & \int_{0}^{T}\int_{\Omega}[-u_k\cdot \phi_{kt}+d_k\nabla u_k\cdot \nabla\phi_k]dxdt\\ & & =\int_{\Omega} u_k(x,0)\phi_k(x,0)dx +\int_{0}^{T}\int_{\Omega} f_k(U)\phi _k(x,t)dxdt, \end{eqnarray*}
\begin{eqnarray*} & & \int_{0}^{T}\int_{\Omega}[-u_k\cdot \phi_{kt}+d_k\nabla u_k\cdot \nabla\phi_k]dxdt\\ & & =\int_{\Omega} u_k(x,0)\phi_k(x,0)dx +\int_{0}^{T}\int_{\Omega} f_k(U)\phi _k(x,t)dxdt, \end{eqnarray*}
for any test function
 $\phi_k\in X^*\bigcap L^{\infty}(Q_{T})$
and
$\phi_k\in X^*\bigcap L^{\infty}(Q_{T})$
and
 $\phi_{kt}\in L^2(Q_{T})$
with
$\phi_{kt}\in L^2(Q_{T})$
with
 $\phi_k(x,T)=0$
on
$\phi_k(x,T)=0$
on
 $\Omega$
for all
$\Omega$
for all
 $k=1,2,3,4$
.
$k=1,2,3,4$
.
Theorem 2.1. Under the assumptions H(2.1)–H(2.3), the problem (2.1)–(2.6) possesses at least one weak solution and the weak solution is nonnegative in
 $Q_T$
.
$Q_T$
.
To obtain more regularity, we need additional regularity for known data.
H(2.4). Assume that
 $b(x,t)\in L^{2, \mu}(Q))$
for any
$b(x,t)\in L^{2, \mu}(Q))$
for any
 $\mu\in [n, n+2)$
. Let
$\mu\in [n, n+2)$
. Let
 $\nabla U_0(x)\in L^{2, \mu}(\Omega)^4$
for any
$\nabla U_0(x)\in L^{2, \mu}(\Omega)^4$
for any
 $\mu\in [n-2, n)$
.
$\mu\in [n-2, n)$
.
Theorem 2.2. Under the assumptions H(2.1)–H(2.4), the problem (2.1)–(2.6) has a unique weak solution
 $U(x,t)\in C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
for any
$U(x,t)\in C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
for any
 $T>0$
with
$T>0$
with
 $\alpha=\frac{\mu+2-n}{2}$
. Moreover, the weak solution is classical if the coefficients
$\alpha=\frac{\mu+2-n}{2}$
. Moreover, the weak solution is classical if the coefficients
 $d_i$
are smooth.
$d_i$
are smooth.
With some additional effort, we can prove that the solution is uniformly bounded in Q for any dimension n.
Theorem 2.3. Under the assumption H(2.1)–(2.4), the problem (2.1)–(2.6) has a unique global solution in
 $L^{\infty}(Q)\bigcap C^{\alpha, \frac{\alpha}{2}}(\bar{Q})$
. Moreover,
$L^{\infty}(Q)\bigcap C^{\alpha, \frac{\alpha}{2}}(\bar{Q})$
. Moreover,
 \[ ||U||_{L^{\infty}(Q)}\leq C,\]
\[ ||U||_{L^{\infty}(Q)}\leq C,\]
where C depends only on known data.
Remark 2.1. The results in Theorems 2.1–2.3 still hold with some modification of the proofs if the system (2.1)–(2.5) contains linear convection terms.
With the result of Theorem 2.3, we can establish the global asymptotic behaviour of the solution.
H(2.5). Assume
 \[\lim_{t\rightarrow \infty}b(x,t)=b_0(x), \lim_{t\rightarrow \infty}d_i(x,t)=d_{i\infty}(x),\qquad x\in \Omega, i=1, 2, 3, 4,\]
\[\lim_{t\rightarrow \infty}b(x,t)=b_0(x), \lim_{t\rightarrow \infty}d_i(x,t)=d_{i\infty}(x),\qquad x\in \Omega, i=1, 2, 3, 4,\]
uniformly in
 $\bar{\Omega}$
. Moreover,
$\bar{\Omega}$
. Moreover,
 $d_{i\infty}(x)\in C^{\alpha}(\bar{\Omega})$
for all i.
$d_{i\infty}(x)\in C^{\alpha}(\bar{\Omega})$
for all i.
Let
 $S_{\infty}(x)$
be the steady-state solution for the following elliptic equation
$S_{\infty}(x)$
be the steady-state solution for the following elliptic equation
 \begin{eqnarray} & & -\nabla[d_1(x)\nabla S_{\infty}]=b_0(x)-dS_{\infty},\qquad x\in \Omega \end{eqnarray}
\begin{eqnarray} & & -\nabla[d_1(x)\nabla S_{\infty}]=b_0(x)-dS_{\infty},\qquad x\in \Omega \end{eqnarray}
 \begin{eqnarray} & & \nabla_{\nu}S_{\infty}(x)=0,\qquad x\in \partial \Omega. \end{eqnarray}
\begin{eqnarray} & & \nabla_{\nu}S_{\infty}(x)=0,\qquad x\in \partial \Omega. \end{eqnarray}
where
 $m_0=\max_{\bar{\Omega}}S_{\infty}(x)$
.
$m_0=\max_{\bar{\Omega}}S_{\infty}(x)$
.
Theorem 2.4. Let the assumption H(2.1)–H(2.5) hold. If the parameters in the system (1.1)–(1.5) satisfy either
-
(a)
 $d_1(x,t)=d_{1\infty}(x)$
and
or
\[ d>2\beta_1m_0+\frac{2\beta_2m_0\xi}{K(\delta-g)}, \delta-g>0 \]
$d_1(x,t)=d_{1\infty}(x)$
and
or
\[ d>2\beta_1m_0+\frac{2\beta_2m_0\xi}{K(\delta-g)}, \delta-g>0 \]
-
(b)
then the corresponding steady-state system of (2.1)–(2.6) has only one steady-state solution
\[ d>\frac{3\beta_1m_0}{2}+\frac{\beta_2m_0\xi}{2K(\delta-g-\frac{\xi}{2})}+\frac{1}{4}\max\{\sigma, \gamma\}, \delta-g-\frac{\xi}{2}>0,\]
$U_{\infty}(x):=(S_{\infty}(x),0,0,0)$
. Moreover,
in
\[ \lim_{t\rightarrow \infty}(S(x,t), I(x,t),R(x,t), B(x,t))=(S_{\infty}(x), 0, 0, 0),\]
$L^p(Q)$
-sense for any
$p>1$
. That is
$(S_{\infty}(x), 0, 0, 0)$
is a global attractor.










3 Global solvability and regularity
From the physical model, the concentration must be nonnegative. Here, we state this fact as a lemma and sketch a proof since we could not find precise reference in the literature. Recall that a vector function is said to be nonnegative if each component of the vector function is nonnegative.
Lemma 3.1: Assume the conditions H(2.1)–H(2.2) hold. Then, a weak solution U(x,t) of (2.1)–(2.6) must be nonnegative in Q:
 \[ U(x,t)\geq 0, (x,t)\in Q_T.\]
\[ U(x,t)\geq 0, (x,t)\in Q_T.\]
Proof Recall that a vector function
 $F(x,t,U):=(f_1(x,t,U),f_2(x,t,U), \cdots, f_m(x,t,U))$
is said to be quasi-positive if for all
$F(x,t,U):=(f_1(x,t,U),f_2(x,t,U), \cdots, f_m(x,t,U))$
is said to be quasi-positive if for all
 $k=1, 2, \cdots, m$
,
$k=1, 2, \cdots, m$
,
 \[ f_k(x,t,u_1,u_2,\cdots, u_{k-1},0,u_{k+1}, \cdots, u_m)\geq 0, u_i\in [0, \infty), i=1, 2, \cdots, m, i\neq k.\]
\[ f_k(x,t,u_1,u_2,\cdots, u_{k-1},0,u_{k+1}, \cdots, u_m)\geq 0, u_i\in [0, \infty), i=1, 2, \cdots, m, i\neq k.\]
Since
 $b(x,t)\geq 0$
, clearly,
$b(x,t)\geq 0$
, clearly,
 $F(x,t,U)=(f_1(U), \cdots, f_4(U))$
is quasi-positive. Moreover,
$F(x,t,U)=(f_1(U), \cdots, f_4(U))$
is quasi-positive. Moreover,
 $f_k(U)$
is locally Lipschitz continuous with respect to
$f_k(U)$
is locally Lipschitz continuous with respect to
 $u_k$
. For a function
$u_k$
. For a function
 $v(x,t)\in L^2(Q_{T})$
, we define
$v(x,t)\in L^2(Q_{T})$
, we define
 \[ v^+(x,t)=\frac{|v(x,t)|+v(x,t)}{2}, v^-(x,t)=\frac{|v(x,t)|-v(x,t)}{2}.\]
\[ v^+(x,t)=\frac{|v(x,t)|+v(x,t)}{2}, v^-(x,t)=\frac{|v(x,t)|-v(x,t)}{2}.\]
Now, we consider a modified system (2.1)–(2.6) in which
 $f_i(U)$
is replaced by
$f_i(U)$
is replaced by
 $f_i(U^+)$
. Then, we choose
$f_i(U^+)$
. Then, we choose
 $\phi_k(x,t)=(T-t)u_{k}^{-}$
(one may need to use a truncation technique as in Lemma 1, p. 749, in [Reference Bendahmane, Langlais and Saad3], if necessary) to obtain, after some routine calculation,
$\phi_k(x,t)=(T-t)u_{k}^{-}$
(one may need to use a truncation technique as in Lemma 1, p. 749, in [Reference Bendahmane, Langlais and Saad3], if necessary) to obtain, after some routine calculation,
 \[ \frac{d}{dt}\int_{\Omega}(T-t)|U^-|^2dx\leq C\int_{\Omega}(T-t)|U^-|^2dx.\]
\[ \frac{d}{dt}\int_{\Omega}(T-t)|U^-|^2dx\leq C\int_{\Omega}(T-t)|U^-|^2dx.\]
It follows that
 $u_{k}^{-}(x,t)=0$
in
$u_{k}^{-}(x,t)=0$
in
 $Q_{T}$
, which implies that a weak solution to the modified system is the same as the original system (2.1)–(2.6).
$Q_{T}$
, which implies that a weak solution to the modified system is the same as the original system (2.1)–(2.6).
As in the standard analysis in deriving an a priori estimate for solution of a partial differential equation, we may assume that the solution is smooth in
 $Q_{T}$
. A special attention is paid to be what a constant C depends precisely on known data in the derivation. We will denote by
$Q_{T}$
. A special attention is paid to be what a constant C depends precisely on known data in the derivation. We will denote by
 $C, C_1, C_2,\cdots,$
etc., generic constants in the derivation. Those constants may be different from one line to the next as long as their dependence is the same.
$C, C_1, C_2,\cdots,$
etc., generic constants in the derivation. Those constants may be different from one line to the next as long as their dependence is the same.
Lemma 3.2: Under the assumptions of H(2.1)–H(2.2), there exists a constants
 $C_1$
such that
$C_1$
such that
 \[ \sum_{i=1}^{4}||u_i||_{V_2(Q_{T})}\leq C_1,\]
\[ \sum_{i=1}^{4}||u_i||_{V_2(Q_{T})}\leq C_1,\]
where
 $C_1$
depends only on known data and the upper bound of T.
$C_1$
depends only on known data and the upper bound of T.
Proof From equations (2.1) and (2.3), we use the energy method to obtain
 \begin{align*}& \frac{1}{2}\frac{d}{dt}\int_{\Omega}u_1^2dx +d_0\int_{\Omega}|\nabla u_1|^2dx +d\int_{\Omega}u_1^2 dx\\[5pt] & \leq \int_{\Omega} u_1b dx +\sigma\int_{\Omega}u_1u_3 dx\\[5pt] & \leq \varepsilon \int_{\Omega}u_1^2dx +C(\varepsilon)\int_{\Omega}b^2dx +\frac{\sigma}{2}\int_{\Omega}\left[u_1^2+u_3^2\right] dx.\\[5pt] & \frac{1}{2}\frac{d}{dt}\int_{\Omega}u_3^2dx +d_0\int_{\Omega}|\nabla u_3|^2dx +(d+\sigma)\int_{\Omega}u_3^2dx\\[5pt] & \leq \gamma\int_{\Omega} u_2u_3 dx \\[5pt] & \leq \frac{\gamma}{2} \int_{\Omega}\left[u_2^2+u_3^2\right] dx.\end{align*}
\begin{align*}& \frac{1}{2}\frac{d}{dt}\int_{\Omega}u_1^2dx +d_0\int_{\Omega}|\nabla u_1|^2dx +d\int_{\Omega}u_1^2 dx\\[5pt] & \leq \int_{\Omega} u_1b dx +\sigma\int_{\Omega}u_1u_3 dx\\[5pt] & \leq \varepsilon \int_{\Omega}u_1^2dx +C(\varepsilon)\int_{\Omega}b^2dx +\frac{\sigma}{2}\int_{\Omega}\left[u_1^2+u_3^2\right] dx.\\[5pt] & \frac{1}{2}\frac{d}{dt}\int_{\Omega}u_3^2dx +d_0\int_{\Omega}|\nabla u_3|^2dx +(d+\sigma)\int_{\Omega}u_3^2dx\\[5pt] & \leq \gamma\int_{\Omega} u_2u_3 dx \\[5pt] & \leq \frac{\gamma}{2} \int_{\Omega}\left[u_2^2+u_3^2\right] dx.\end{align*}
It follows that
 \begin{align*}& \frac{1}{2}\frac{d}{dt}\int_{\Omega}\left[u_1^2+u_3^2\right]dx +d_0\int_{\Omega}\left[|\nabla u_1|^2+|\nabla u_3|^2\right]dx\\[5pt] & +\left(d-\varepsilon-\frac{\sigma}{2}\right)\int_{\Omega}u_1^2dx +\left(d+\frac{\sigma}{2}-\frac{\gamma}{2}\right)\int_{\Omega}u_3^2dx\\[5pt] & \leq C(\varepsilon)\int_{\Omega}b^2dx +\frac{\gamma}{2}\int_{\Omega}u_2^2 dx.\end{align*}
\begin{align*}& \frac{1}{2}\frac{d}{dt}\int_{\Omega}\left[u_1^2+u_3^2\right]dx +d_0\int_{\Omega}\left[|\nabla u_1|^2+|\nabla u_3|^2\right]dx\\[5pt] & +\left(d-\varepsilon-\frac{\sigma}{2}\right)\int_{\Omega}u_1^2dx +\left(d+\frac{\sigma}{2}-\frac{\gamma}{2}\right)\int_{\Omega}u_3^2dx\\[5pt] & \leq C(\varepsilon)\int_{\Omega}b^2dx +\frac{\gamma}{2}\int_{\Omega}u_2^2 dx.\end{align*}
To estimate
 $u_2$
, we must use the special structure of the system (1.1)–(1.4).
$u_2$
, we must use the special structure of the system (1.1)–(1.4).
Let
 \[ v(x,t)=u_1(x,t)+u_2(x,t),\quad (x,t)\in Q.\]
\[ v(x,t)=u_1(x,t)+u_2(x,t),\quad (x,t)\in Q.\]
Then, we see that v(x,t) satisfies
 \begin{eqnarray} & & v_t-\nabla[d_2\nabla v]+dv=\nabla [(d_1-d_2)\nabla u_1]+b(x,t)-\gamma u_2+\sigma u_3,\quad (x,t)\in Q_{T}, \end{eqnarray}
\begin{eqnarray} & & v_t-\nabla[d_2\nabla v]+dv=\nabla [(d_1-d_2)\nabla u_1]+b(x,t)-\gamma u_2+\sigma u_3,\quad (x,t)\in Q_{T}, \end{eqnarray}
 \begin{eqnarray}& & v(x,0)=S_0(x)+I_0(x), x\in \Omega; \,\nabla_{\nu}v=0, (x,t)\in \partial \Omega \times (0,\infty).\end{eqnarray}
\begin{eqnarray}& & v(x,0)=S_0(x)+I_0(x), x\in \Omega; \,\nabla_{\nu}v=0, (x,t)\in \partial \Omega \times (0,\infty).\end{eqnarray}
The energy estimate for v from equations (3.1)–(3.2) yields
 \begin{eqnarray*}& & \frac{1}{2}\frac{d}{dt}\int_{\Omega}v^2dx +d_0\int_{\Omega}|\nabla v|^2dx +d\int_{\Omega}v^2dx \\[5pt] & & \leq 2D_0\int_{\Omega}[|\nabla u_1| \cdot |\nabla v|]dx+\int_{\Omega}vb dx +\sigma\int_{\Omega}u_3vdx\\[5pt] & & \leq \frac{d_0}{2}\int_{\Omega}|\nabla v|^2dx +C\int_{\Omega} |\nabla u_1|^2dx +\varepsilon \int_{\Omega}v^2dx +C(\varepsilon)\int_{\Omega}b^2dx +\frac{\gamma}{2}\int_{\Omega}[u_3^2+v^2]dx,\end{eqnarray*}
\begin{eqnarray*}& & \frac{1}{2}\frac{d}{dt}\int_{\Omega}v^2dx +d_0\int_{\Omega}|\nabla v|^2dx +d\int_{\Omega}v^2dx \\[5pt] & & \leq 2D_0\int_{\Omega}[|\nabla u_1| \cdot |\nabla v|]dx+\int_{\Omega}vb dx +\sigma\int_{\Omega}u_3vdx\\[5pt] & & \leq \frac{d_0}{2}\int_{\Omega}|\nabla v|^2dx +C\int_{\Omega} |\nabla u_1|^2dx +\varepsilon \int_{\Omega}v^2dx +C(\varepsilon)\int_{\Omega}b^2dx +\frac{\gamma}{2}\int_{\Omega}[u_3^2+v^2]dx,\end{eqnarray*}
We combine the estimates for
 $u_1, u_3$
and v to obtain
$u_1, u_3$
and v to obtain
 \begin{eqnarray*}& & \frac{1}{2}\frac{d}{dt}\int_{\Omega}[u_1^2+u_3^2+v^2]dx+\frac{d_0}{2}\int_{\Omega}[|\nabla u_1|^2+|\nabla u_3|^2+|\nabla v|^2]dx\\[5pt] & & \leq C \int_{\Omega}[u_1^2+u_3^2+v^2] dx+C\int_{\Omega}b^2dx,\end{eqnarray*}
\begin{eqnarray*}& & \frac{1}{2}\frac{d}{dt}\int_{\Omega}[u_1^2+u_3^2+v^2]dx+\frac{d_0}{2}\int_{\Omega}[|\nabla u_1|^2+|\nabla u_3|^2+|\nabla v|^2]dx\\[5pt] & & \leq C \int_{\Omega}[u_1^2+u_3^2+v^2] dx+C\int_{\Omega}b^2dx,\end{eqnarray*}
where C depends only on known data.
Gronwall’s inequality yields
 \[ \int_{\Omega}[u_1^2+u_3^3+v^2]dx +\int_{0}^{t}\int_{\Omega}[|\nabla u_1|^2+|\nabla u_3|^2+|\nabla v|^2dx]dxdt\leq C+C\int_{0}^{T}\int_{\Omega}b^2dxdt,\]
\[ \int_{\Omega}[u_1^2+u_3^3+v^2]dx +\int_{0}^{t}\int_{\Omega}[|\nabla u_1|^2+|\nabla u_3|^2+|\nabla v|^2dx]dxdt\leq C+C\int_{0}^{T}\int_{\Omega}b^2dxdt,\]
where C depends only on known data and T.
It follows that
 \[ ||u_1||_{V_{2}(Q_{T})}\leq C; \, ||u_3||_{V_2(Q_{T})}\leq C.\]
\[ ||u_1||_{V_{2}(Q_{T})}\leq C; \, ||u_3||_{V_2(Q_{T})}\leq C.\]
By the definition of v, we see
 \[ ||u_2||_{V_{2}(Q_{T})}\leq C,\]
\[ ||u_2||_{V_{2}(Q_{T})}\leq C,\]
where C depends only on known data and the upper bound of T.
Once
 $u_2$
is bounded in
$u_2$
is bounded in
 $V_2(Q_T)$
, by equation (2.4), we easily obtain an estimate for
$V_2(Q_T)$
, by equation (2.4), we easily obtain an estimate for
 $u_4$
:
$u_4$
:
 \[||u_4||_{V_2(Q_{T})}\leq C,\]
\[||u_4||_{V_2(Q_{T})}\leq C,\]
where C depends only on known data.
With the estimates from the previous lemmas, we are now ready to prove Theorem 2.1.
Proof of Theorem 2.1
. There are several ways to prove the existence of a weak solution for the system (2.1)–(2.6). We use a truncation method. For any
 $\varepsilon>0$
, we denote by
$\varepsilon>0$
, we denote by
 $\chi(u)$
the Heaviside function. Denote the smooth approximation of
$\chi(u)$
the Heaviside function. Denote the smooth approximation of
 $\chi_{\varepsilon}(u)$
by
$\chi_{\varepsilon}(u)$
by
 \begin{align*} \chi_{\varepsilon}(u)= \mbox{smooth approximation of $\chi\left(u-\frac{1}{\varepsilon}\right)$}.\end{align*}
\begin{align*} \chi_{\varepsilon}(u)= \mbox{smooth approximation of $\chi\left(u-\frac{1}{\varepsilon}\right)$}.\end{align*}
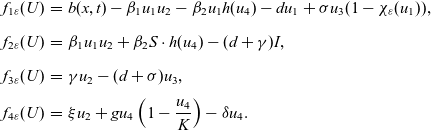 \begin{eqnarray*}f_{1\varepsilon}(U) & = & b(x,t)-\beta_1u_{1}u_{2}-\beta_2 u_1h(u_4)-du_1+\sigma u_3(1-\chi_{\varepsilon}(u_1)),\\[5pt] f_{2\varepsilon}(U) & = & \beta_1u_1u_2+\beta_2S \cdot h(u_4)-(d+\gamma)I,\\[5pt] f_{3\varepsilon}(U) & = & \gamma u_2 -(d+\sigma)u_3,\\[5pt] f_{4\varepsilon}(U) & = & \xi u_2 +gu_4\left(1-\frac{u_4}{K}\right)-\delta u_4.\end{eqnarray*}
\begin{eqnarray*}f_{1\varepsilon}(U) & = & b(x,t)-\beta_1u_{1}u_{2}-\beta_2 u_1h(u_4)-du_1+\sigma u_3(1-\chi_{\varepsilon}(u_1)),\\[5pt] f_{2\varepsilon}(U) & = & \beta_1u_1u_2+\beta_2S \cdot h(u_4)-(d+\gamma)I,\\[5pt] f_{3\varepsilon}(U) & = & \gamma u_2 -(d+\sigma)u_3,\\[5pt] f_{4\varepsilon}(U) & = & \xi u_2 +gu_4\left(1-\frac{u_4}{K}\right)-\delta u_4.\end{eqnarray*}
Now, we consider the following approximated reaction–diffusion system:
 \begin{eqnarray}& & u_{1 \varepsilon}-\nabla[d_1(x,t)\nabla u_1]=f_{1\varepsilon}(U),\qquad (x,t)\in Q_{T},\end{eqnarray}
\begin{eqnarray}& & u_{1 \varepsilon}-\nabla[d_1(x,t)\nabla u_1]=f_{1\varepsilon}(U),\qquad (x,t)\in Q_{T},\end{eqnarray}
 \begin{eqnarray} & & u_{2 t}-\nabla[d_2(x,t)\nabla u_{2}]=f_{2\varepsilon}(U), \qquad (x,t)\in Q_{T}, \end{eqnarray}
\begin{eqnarray} & & u_{2 t}-\nabla[d_2(x,t)\nabla u_{2}]=f_{2\varepsilon}(U), \qquad (x,t)\in Q_{T}, \end{eqnarray}
 \begin{eqnarray}& & u_{3 t}-\nabla[d_3(x,t)\nabla u_{3}]=f_{3\varepsilon}(U),\qquad (x,t)\in Q_{T},\end{eqnarray}
\begin{eqnarray}& & u_{3 t}-\nabla[d_3(x,t)\nabla u_{3}]=f_{3\varepsilon}(U),\qquad (x,t)\in Q_{T},\end{eqnarray}
 \begin{eqnarray} & & u_{4 t}-\nabla[d_4(x,t)\nabla u_{4 }]=f_{4\varepsilon}(U),\qquad (x,t)\in Q_T, \end{eqnarray}
\begin{eqnarray} & & u_{4 t}-\nabla[d_4(x,t)\nabla u_{4 }]=f_{4\varepsilon}(U),\qquad (x,t)\in Q_T, \end{eqnarray}
subject to the same initial and boundary conditions (2.5)–(2.6).
For the approximate problem (3.3)–(3.6) subject to initial-boundary conditions (2.5)–(2.6), by using the standard theory for parabolic equations (see [Reference Evans10] or [Reference Ladyzenskaja, Solonikov and Uralceva16]), we claim that there exists a unique weak solution in
 $V_2(Q_{T})\bigcap L^{\infty}(Q_{T})$
for every small
$V_2(Q_{T})\bigcap L^{\infty}(Q_{T})$
for every small
 $\varepsilon>0$
and
$\varepsilon>0$
and
 \[ \sum_{i=1}^{4}||u_{i\varepsilon}||_{L^{\infty}(Q_{T})}\leq C(\varepsilon),\]
\[ \sum_{i=1}^{4}||u_{i\varepsilon}||_{L^{\infty}(Q_{T})}\leq C(\varepsilon),\]
where
 $C(\varepsilon)$
depends on known data and
$C(\varepsilon)$
depends on known data and
 $\varepsilon$
.
$\varepsilon$
.
For the completeness, we sketch a proof for the claim here. For the existence of a bounded weak solution
 $U_{\varepsilon}(x,t)$
, we use Leray–Schauder’s fixed-point theorem. Choose a Banach space
$U_{\varepsilon}(x,t)$
, we use Leray–Schauder’s fixed-point theorem. Choose a Banach space
 $X=L^{\infty}(Q_{T})^4$
. For every
$X=L^{\infty}(Q_{T})^4$
. For every
 $V(x,t)\in X$
and each
$V(x,t)\in X$
and each
 $\lambda \in [0,1]$
, the standard theory of parabolic equations (see [Reference Ladyzenskaja, Solonikov and Uralceva16]) implies that there exists a unique weak solution
$\lambda \in [0,1]$
, the standard theory of parabolic equations (see [Reference Ladyzenskaja, Solonikov and Uralceva16]) implies that there exists a unique weak solution
 $U_{\varepsilon}(x,t)\in V_2(Q_{T})^4\bigcap X$
for the following linear parabolic system:
$U_{\varepsilon}(x,t)\in V_2(Q_{T})^4\bigcap X$
for the following linear parabolic system:
 \begin{eqnarray*}& & u_{1 \varepsilon}-\nabla[d_1(x,t)\nabla u_1]= \lambda f_{1\varepsilon}(V),\quad (x,t)\in Q_{T},\\[5pt] & & u_{2 t}-\nabla[d_2(x,t)\nabla u_{2}]= \lambda f_{2\varepsilon}(V),\quad (x,t)\in Q_{T}, \\[5pt] & & u_{3 t}-\nabla[d_3(x,t)\nabla u_{3}]=\lambda f_{3\varepsilon}(V),\quad (x,t) \in Q_{T},\\[5pt] & & u_{4 t}-\nabla[d_4(x,t)\nabla u_{4 }]= \lambda f_{4\varepsilon}(V),\quad (x,t)\in Q_T, \\[5pt] & & \partial_{\nu}U(x,t)=0, (x,t)\in \partial \Omega\times (0,T], U(x,0)=\lambda U_0(x), x\in \Omega. \end{eqnarray*}
\begin{eqnarray*}& & u_{1 \varepsilon}-\nabla[d_1(x,t)\nabla u_1]= \lambda f_{1\varepsilon}(V),\quad (x,t)\in Q_{T},\\[5pt] & & u_{2 t}-\nabla[d_2(x,t)\nabla u_{2}]= \lambda f_{2\varepsilon}(V),\quad (x,t)\in Q_{T}, \\[5pt] & & u_{3 t}-\nabla[d_3(x,t)\nabla u_{3}]=\lambda f_{3\varepsilon}(V),\quad (x,t) \in Q_{T},\\[5pt] & & u_{4 t}-\nabla[d_4(x,t)\nabla u_{4 }]= \lambda f_{4\varepsilon}(V),\quad (x,t)\in Q_T, \\[5pt] & & \partial_{\nu}U(x,t)=0, (x,t)\in \partial \Omega\times (0,T], U(x,0)=\lambda U_0(x), x\in \Omega. \end{eqnarray*}
We define a mapping
 $M_{\lambda}$
from X into X as follows:
$M_{\lambda}$
from X into X as follows:
 \[ M_{\lambda}: V\in X \rightarrow U_{\varepsilon}=M_{\lambda}[V]\in X.\]
\[ M_{\lambda}: V\in X \rightarrow U_{\varepsilon}=M_{\lambda}[V]\in X.\]
Clearly, the mapping
 $M_{\lambda}$
is well-defined and
$M_{\lambda}$
is well-defined and
 $M_0[V]=0$
. Moreover, DeGiorgi–Nash’s theory implies that all fixed-points of
$M_0[V]=0$
. Moreover, DeGiorgi–Nash’s theory implies that all fixed-points of
 $M_{\lambda}$
satisfies
$M_{\lambda}$
satisfies
 \[ ||U_{\varepsilon}||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})}\leq C(\varepsilon),\]
\[ ||U_{\varepsilon}||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})}\leq C(\varepsilon),\]
where
 $\alpha\in (0,1)$
and
$\alpha\in (0,1)$
and
 $C(\varepsilon)$
is a constant which depends on
$C(\varepsilon)$
is a constant which depends on
 $\varepsilon$
.
$\varepsilon$
.
Since the embedding mapping from
 $C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
into
$C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
into
 $L^{\infty}(Q_{T})$
is compact, we can easily show that the mapping
$L^{\infty}(Q_{T})$
is compact, we can easily show that the mapping
 $M_{\lambda}$
is continuous and compact from X to
$M_{\lambda}$
is continuous and compact from X to
 $C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
. By Leray–Schauder’s fixed-point theorem, the problem (3.3)–(3.6) along with the initial-boundary conditions (2.5)–(2.6) has a weak solution
$C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})$
. By Leray–Schauder’s fixed-point theorem, the problem (3.3)–(3.6) along with the initial-boundary conditions (2.5)–(2.6) has a weak solution
 $U_{\varepsilon}(x,t)\in V_2(Q_{T}\bigcap L^{\infty}(Q_{T})$
. Uniqueness follows from the fact that all weak solutions are bounded and
$U_{\varepsilon}(x,t)\in V_2(Q_{T}\bigcap L^{\infty}(Q_{T})$
. Uniqueness follows from the fact that all weak solutions are bounded and
 $f_k$
is locally Lipschtz continuous with respect to
$f_k$
is locally Lipschtz continuous with respect to
 $u_i$
.
$u_i$
.
Next, we see that all a priori energy estimates from Lemma 3.2 hold and these bounds are independent of
 $\varepsilon$
. Note that
$\varepsilon$
. Note that
 $U_{\varepsilon t}\in L^{2}(0,T;H^{-1}(\Omega))$
. By using the weak compactness of
$U_{\varepsilon t}\in L^{2}(0,T;H^{-1}(\Omega))$
. By using the weak compactness of
 $L^{2}(Q_T)$
, we can extract a subsequence of
$L^{2}(Q_T)$
, we can extract a subsequence of
 $\varepsilon$
if necessary, as
$\varepsilon$
if necessary, as
 $\varepsilon\rightarrow 0$
, that for
$\varepsilon\rightarrow 0$
, that for
 $k=1,2,3,4,$
$k=1,2,3,4,$
 \begin{eqnarray*}& & u_{k\varepsilon}(x,t)\rightarrow u_k(x,t),\qquad \mbox{strongly in $L^{2}(Q_{T})$ and $a.e.$ in $Q_{T}$},\\[5pt] & & \nabla u_{k\varepsilon} (x,t) \rightarrow \nabla u_k(x,t), \mbox{weakly in $L^{2}(Q_{T})$}.\end{eqnarray*}
\begin{eqnarray*}& & u_{k\varepsilon}(x,t)\rightarrow u_k(x,t),\qquad \mbox{strongly in $L^{2}(Q_{T})$ and $a.e.$ in $Q_{T}$},\\[5pt] & & \nabla u_{k\varepsilon} (x,t) \rightarrow \nabla u_k(x,t), \mbox{weakly in $L^{2}(Q_{T})$}.\end{eqnarray*}
Moreover, by using Egorov’s theorem, we see, as
 $\varepsilon\rightarrow 0$
,
$\varepsilon\rightarrow 0$
,
 \[ \int\int_{Q_{T}}|u_{1\varepsilon}u_{2\varepsilon}-u_1u_2|dxdt\leq \int\int_{Q_{T}}[|(u_{1\varepsilon}-u_1)u_{2\varepsilon}|+u_1|u_{2\varepsilon}-u_2|]dxdt\rightarrow 0.\]
\[ \int\int_{Q_{T}}|u_{1\varepsilon}u_{2\varepsilon}-u_1u_2|dxdt\leq \int\int_{Q_{T}}[|(u_{1\varepsilon}-u_1)u_{2\varepsilon}|+u_1|u_{2\varepsilon}-u_2|]dxdt\rightarrow 0.\]
On the other hand, since
 $u_1\in L^{\infty}(0,T;W^{1,2}(\Omega))$
, we see
$u_1\in L^{\infty}(0,T;W^{1,2}(\Omega))$
, we see
 \[ \bigg|\left\{(x,t)\in Q_{T}: u_1>\frac{1}{\varepsilon}\right\}\bigg|\]
\[ \bigg|\left\{(x,t)\in Q_{T}: u_1>\frac{1}{\varepsilon}\right\}\bigg|\]
is sufficiently small, provided that
 $\varepsilon$
is chosen to be sufficiently small. It follows that for any test function
$\varepsilon$
is chosen to be sufficiently small. It follows that for any test function
 $\phi(x,t)\in L^2(0,T;W_{2}^{1}(\Omega))\bigcap L^{\infty}(Q_{T}) $
$\phi(x,t)\in L^2(0,T;W_{2}^{1}(\Omega))\bigcap L^{\infty}(Q_{T}) $
 \[\lim_{\varepsilon\rightarrow 0} \int\int_{Q_{T}}u_{3\varepsilon}(1-\chi_{\varepsilon}(u_{1\varepsilon})\phi dxdt= \int\int_{\Omega}u_{3}\phi dxdt.\]
\[\lim_{\varepsilon\rightarrow 0} \int\int_{Q_{T}}u_{3\varepsilon}(1-\chi_{\varepsilon}(u_{1\varepsilon})\phi dxdt= \int\int_{\Omega}u_{3}\phi dxdt.\]
Consequently, for all k we have, as
 $\varepsilon \rightarrow 0$
,
$\varepsilon \rightarrow 0$
,
 \[ f_{k\varepsilon}(U_{\varepsilon})\rightarrow f_{k}(U)\, a.e.\mbox{ in $Q_{T}$ and strongly in $L^1(Q_{T})$}.\]
\[ f_{k\varepsilon}(U_{\varepsilon})\rightarrow f_{k}(U)\, a.e.\mbox{ in $Q_{T}$ and strongly in $L^1(Q_{T})$}.\]
For any test function
 $\phi_k\in X^*$
with
$\phi_k\in X^*$
with
 $\phi_k\in L^{\infty}(Q_{T})$
and
$\phi_k\in L^{\infty}(Q_{T})$
and
 $\phi_{kt}\in X^*, \phi_k(x,T)=0$
, we have for all
$\phi_{kt}\in X^*, \phi_k(x,T)=0$
, we have for all
 $k=1,2,3,4$
,
$k=1,2,3,4$
,
 \begin{eqnarray*} & & \int_{0}^{T}\int_{\Omega}[-u_{k\varepsilon}\cdot \phi_{kt}+d_k\nabla u_{\varepsilon}\cdot \nabla\phi_k]dxdt=\int_{\Omega}u_{k0}(x)\phi_k(x,0)dx+\int_{\Omega} f_{\varepsilon k}(U_{\varepsilon})\phi _k(x,t)dxdt. \end{eqnarray*}
\begin{eqnarray*} & & \int_{0}^{T}\int_{\Omega}[-u_{k\varepsilon}\cdot \phi_{kt}+d_k\nabla u_{\varepsilon}\cdot \nabla\phi_k]dxdt=\int_{\Omega}u_{k0}(x)\phi_k(x,0)dx+\int_{\Omega} f_{\varepsilon k}(U_{\varepsilon})\phi _k(x,t)dxdt. \end{eqnarray*}
After taking limit as
 $\varepsilon\rightarrow 0$
, we obtain a weak solution
$\varepsilon\rightarrow 0$
, we obtain a weak solution
 $U(x,t)\in X.$
$U(x,t)\in X.$
To obtain more regularity, we need a result in Campanato–John–Nirenberg–Morrey space for a linear parabolic equation. Consider the following linear parabolic equation
 \begin{eqnarray}& & u_t-\nabla (a(x,t)\nabla u)=f(x,t)+\sum_{i=1}^{n}\frac{\partial f_{i}}{\partial x_i}, (x,t)\in Q_{T},\end{eqnarray}
\begin{eqnarray}& & u_t-\nabla (a(x,t)\nabla u)=f(x,t)+\sum_{i=1}^{n}\frac{\partial f_{i}}{\partial x_i}, (x,t)\in Q_{T},\end{eqnarray}
 \begin{eqnarray}& & \nabla_{\nu}u(x,t)=0, (x,t)\in \partial \Omega\times (0,T],\end{eqnarray}
\begin{eqnarray}& & \nabla_{\nu}u(x,t)=0, (x,t)\in \partial \Omega\times (0,T],\end{eqnarray}
 \begin{eqnarray}& & u(x,0)=u_0(x), x\in \Omega.\end{eqnarray}
\begin{eqnarray}& & u(x,0)=u_0(x), x\in \Omega.\end{eqnarray}
H(3.1): Assume that
 $a(x,t)\in L^{\infty}(Q_{T})$
and
$a(x,t)\in L^{\infty}(Q_{T})$
and
 \[ 0<a_0\leq a(x,t)\leq A_0<\infty.\]
\[ 0<a_0\leq a(x,t)\leq A_0<\infty.\]
Moreover,
 $\nabla u_0(x)\in L^{2, \mu}(\Omega), f\in L^{2, \mu}(Q_T)$
and
$\nabla u_0(x)\in L^{2, \mu}(\Omega), f\in L^{2, \mu}(Q_T)$
and
 $f_i(x,t)\in L^{2, \mu}(Q_{T})$
with
$f_i(x,t)\in L^{2, \mu}(Q_{T})$
with
 $\mu \in [0, n+2)$
.
$\mu \in [0, n+2)$
.
Lemma 3.3. ([Reference Yin36]) Under the assumption of H(3.1) for any weak solution
 $u(x,t)\in V_2(Q_T)$
to the problem (3.7)–(3.9) and any
$u(x,t)\in V_2(Q_T)$
to the problem (3.7)–(3.9) and any
 $\mu\in [0, n)$
, there exists a constant
$\mu\in [0, n)$
, there exists a constant
 $C_1$
such that
$C_1$
such that
 \begin{align} ||\nabla u||_{L^{2, \mu}(Q_{T})}\leq C_1\left[||\nabla u_0||_{L^{2, \mu}(\Omega)}+||f||_{L^{2, (\mu-2)^+}(Q_{T})}+\sum_{i=1}^{n}||f_i||_{L^{2, \mu}(Q_{T})}\right].\end{align}
\begin{align} ||\nabla u||_{L^{2, \mu}(Q_{T})}\leq C_1\left[||\nabla u_0||_{L^{2, \mu}(\Omega)}+||f||_{L^{2, (\mu-2)^+}(Q_{T})}+\sum_{i=1}^{n}||f_i||_{L^{2, \mu}(Q_{T})}\right].\end{align}
Moreover, there exists a constant
 $C_2$
such that
$C_2$
such that
 \begin{align} ||u||_{L^{2, \mu+2}(Q_{T})}\leq C_2,\end{align}
\begin{align} ||u||_{L^{2, \mu+2}(Q_{T})}\leq C_2,\end{align}
where
 $C_1$
and
$C_1$
and
 $C_2$
depend only on
$C_2$
depend only on
 $a_0, A_0, T $
and
$a_0, A_0, T $
and
 $\Omega$
.
$\Omega$
.
Proof of Theorem 2.2
. For any
 $\mu \in (0, 2]$
, we use equation (2.1) to obtain
$\mu \in (0, 2]$
, we use equation (2.1) to obtain
 \[ ||\nabla u_1||_{L^{2, \mu}(Q_{T})}\leq C[||\nabla S_0||_{L^{2, \mu}(\Omega)}+||u_3||_{L^{2, (\mu-2)^+}(Q_{T})}].\]
\[ ||\nabla u_1||_{L^{2, \mu}(Q_{T})}\leq C[||\nabla S_0||_{L^{2, \mu}(\Omega)}+||u_3||_{L^{2, (\mu-2)^+}(Q_{T})}].\]
Similarly, by equation (2.3), we obtain
 \[ ||\nabla u_3||_{L^{2, \mu}(Q_{T})}\leq C[||\nabla R_0||_{L^{2, \mu}(\Omega)}+||u_2||_{L^{2, (\mu-2)^+}(Q_{T})}].\]
\[ ||\nabla u_3||_{L^{2, \mu}(Q_{T})}\leq C[||\nabla R_0||_{L^{2, \mu}(\Omega)}+||u_2||_{L^{2, (\mu-2)^+}(Q_{T})}].\]
From the linear system (3.1)–(3.2) for
 $v=u_1+u_2$
, we see
$v=u_1+u_2$
, we see
 \[ ||\nabla v||_{L^{2, \mu}(Q_{T})}\leq C[||\nabla v_0||_{L^{2, \mu}(\Omega)}+||\nabla u_1||_{L^{2, \mu}(Q_{T})}+||u_2||_{L^{2, (\mu-2)^+}(Q_{T})}]+||u_3||_{L^{2, (\mu-2)^+}(Q_{T})}],\]
\[ ||\nabla v||_{L^{2, \mu}(Q_{T})}\leq C[||\nabla v_0||_{L^{2, \mu}(\Omega)}+||\nabla u_1||_{L^{2, \mu}(Q_{T})}+||u_2||_{L^{2, (\mu-2)^+}(Q_{T})}]+||u_3||_{L^{2, (\mu-2)^+}(Q_{T})}],\]
where C depends only on known data.
Since
 $v(x,t)=u_1(x,t)+u_2(x,t)$
, we see
$v(x,t)=u_1(x,t)+u_2(x,t)$
, we see
 \begin{eqnarray}& & \sum_{i=1}^{3}||\nabla u_i||_{L^{2, \mu}(Q_{T})}\nonumber\\[5pt] & & \leq C\left[||\nabla S_0||_{L^{2, \mu}(\Omega)}+||\nabla I_0||_{L^{2, \mu}(\Omega)}+||\nabla R_0||_{L^{2, \mu}(\Omega)}+\sum_{i=1}^{3}||u_i||_{L^{2, (\mu-2)^+}(Q_{T})}\right].\end{eqnarray}
\begin{eqnarray}& & \sum_{i=1}^{3}||\nabla u_i||_{L^{2, \mu}(Q_{T})}\nonumber\\[5pt] & & \leq C\left[||\nabla S_0||_{L^{2, \mu}(\Omega)}+||\nabla I_0||_{L^{2, \mu}(\Omega)}+||\nabla R_0||_{L^{2, \mu}(\Omega)}+\sum_{i=1}^{3}||u_i||_{L^{2, (\mu-2)^+}(Q_{T})}\right].\end{eqnarray}
The
 $L^2(Q_{T})$
-estimate for
$L^2(Q_{T})$
-estimate for
 $u_i, i=1,2,3$
implies that the above estimate holds for any
$u_i, i=1,2,3$
implies that the above estimate holds for any
 $\mu\in [0,2]$
. The interpolation yields that, for any
$\mu\in [0,2]$
. The interpolation yields that, for any
 $\mu\in [0,2]$
,
$\mu\in [0,2]$
,
 \begin{eqnarray} \sum_{i=1}^{3}||u_i||_{L^{2,\mu+2}(Q_{T})}\leq C, \end{eqnarray}
\begin{eqnarray} \sum_{i=1}^{3}||u_i||_{L^{2,\mu+2}(Q_{T})}\leq C, \end{eqnarray}
where C depends only on known data.
Now, we go back the estimate (3.12) to see that the estimate (3.13) holds for any
 $\mu\in [2, 4]$
. We can continue this iteration process as long as the right-hand side of (3.9) is bounded. After a finite number of iterations, we see that the above estimate (3.12) holds for any
$\mu\in [2, 4]$
. We can continue this iteration process as long as the right-hand side of (3.9) is bounded. After a finite number of iterations, we see that the above estimate (3.12) holds for any
 $\mu\in [0, n)$
.
$\mu\in [0, n)$
.
Since equation (2.3) is linear, we can use the interpolation to obtain
 \[ ||u_3||_{L^{2, \mu+2}(Q_{T})}\leq C,\]
\[ ||u_3||_{L^{2, \mu+2}(Q_{T})}\leq C,\]
where
 $\mu\in [0,n)$
and C depends only on known data.
$\mu\in [0,n)$
and C depends only on known data.
It follows that
 \[ ||u_3||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})}\leq C,\]
\[ ||u_3||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})}\leq C,\]
where C depends only on known data and
 $\alpha=\frac{\mu+2-n}{2}$
.
$\alpha=\frac{\mu+2-n}{2}$
.
Once we have the estimate for
 $u_3$
in
$u_3$
in
 $C^{\alpha, \frac{\alpha}{2}}(\bar{Q})_{T}$
, we obtain
$C^{\alpha, \frac{\alpha}{2}}(\bar{Q})_{T}$
, we obtain
 \[|| u_1||_{L^{\infty}(Q_{T})}\leq C.\]
\[|| u_1||_{L^{\infty}(Q_{T})}\leq C.\]
Now, we can use the standard DiGorgi–Nash’s estimate to obtain
 \[ ||u_1||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q})_{T})}+|u_2||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q})_{T})}\leq C,\]
\[ ||u_1||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q})_{T})}+|u_2||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q})_{T})}\leq C,\]
where C depends only on known data.
From equation (2.4), we obtain
 \[ ||u_4||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})}\leq C,\]
\[ ||u_4||_{C^{\alpha, \frac{\alpha}{2}}(\bar{Q}_{T})}\leq C,\]
where C depends only on known data.
With these estimates, the uniqueness follows immediately.
Finally, using the general theory of parabolic equations, we see that
 $u_i$
is smooth in
$u_i$
is smooth in
 $Q_T$
as long as
$Q_T$
as long as
 $d_i(x,t)$
is smooth for all
$d_i(x,t)$
is smooth for all
 $i=1,2,3,4.$
$i=1,2,3,4.$
4 Global bounds and asymptotic behaviour of solution
In this section, we first derive a global bound for U and then prove Theorems 2.3 and 2.4. Unlike the proof of Theorem 2.2, we must pay a special attention to various estimates which must be independent of T.
In order to see a clear physical meaning for all species, we may use the original variables (S,I,R, B) or
 $(u_1,u_2,u_3, u_4)$
in this section.
$(u_1,u_2,u_3, u_4)$
in this section.
Lemma 4.1. Under the assumptions H(2.1)–H(2.2), there exists a constant
 $C_1$
such that
$C_1$
such that
 \begin{eqnarray*}& & \sup_{0<t<\infty}\sum_{k=1}^{4}||u_k||_{L^1(\Omega)}\leq C_1,\end{eqnarray*}
\begin{eqnarray*}& & \sup_{0<t<\infty}\sum_{k=1}^{4}||u_k||_{L^1(\Omega)}\leq C_1,\end{eqnarray*}
where
 $C_1$
depends only on know data.
$C_1$
depends only on know data.
Proof: We take integration over
 $\Omega$
for equations (2.1)–(2.3) and then add up to see
$\Omega$
for equations (2.1)–(2.3) and then add up to see
 \begin{eqnarray*}& & \frac{d}{dt}\int_{\Omega}(u_1+u_2+u_3)dx+d\int_{\Omega}(u_1+u_2+u_3)dx \\[5pt] & & =\int_{\Omega}b(x,t)dx \leq b_0|\Omega|.\end{eqnarray*}
\begin{eqnarray*}& & \frac{d}{dt}\int_{\Omega}(u_1+u_2+u_3)dx+d\int_{\Omega}(u_1+u_2+u_3)dx \\[5pt] & & =\int_{\Omega}b(x,t)dx \leq b_0|\Omega|.\end{eqnarray*}
Since
 $d>0$
, it follows that
$d>0$
, it follows that
 \[ \sup_{0<t<\infty}\int_{\Omega}(u_1+u_2+u_3)dx\leq C_1,\]
\[ \sup_{0<t<\infty}\int_{\Omega}(u_1+u_2+u_3)dx\leq C_1,\]
where
 $C_1$
depends only on known data.
$C_1$
depends only on known data.
Now, we integrate of
 $\Omega$
for equation (2.1) again to find
$\Omega$
for equation (2.1) again to find
 \[ \frac{d}{dt}\int_{\Omega}u_1dx+\beta_1\int_{\Omega}u_1u_2 dx+\beta_2\int_{\Omega}u_1h(u_4)dx= \int_{\Omega}b(x,t)dx +\sigma\int_{\Omega}u_3dx.\]
\[ \frac{d}{dt}\int_{\Omega}u_1dx+\beta_1\int_{\Omega}u_1u_2 dx+\beta_2\int_{\Omega}u_1h(u_4)dx= \int_{\Omega}b(x,t)dx +\sigma\int_{\Omega}u_3dx.\]
It follows that
 \[ \beta_1\int_{0}^{T}\int_{\Omega}u_1u_2 dxdt+\beta_2\int_{0}^{T}\int_{\Omega}u_1(u_4)dxdt\leq C_2.\]
\[ \beta_1\int_{0}^{T}\int_{\Omega}u_1u_2 dxdt+\beta_2\int_{0}^{T}\int_{\Omega}u_1(u_4)dxdt\leq C_2.\]
Next, we take integration over
 $\Omega$
for equation (2.4) to obtain
$\Omega$
for equation (2.4) to obtain
 \begin{eqnarray*}& & \frac{d}{dt}\int_{\Omega}u_4dx+\delta\int_{\Omega}u_4dx+g\int_{\Omega}u_{4}^2dx\\[5pt] & & =\xi \int_{\Omega}u_2dx+g\int_{\Omega}u_4 dx\\[5pt] & & \leq \xi \int_{\Omega}u_2dx+ \frac{g}{2}\int_{\Omega}u_{4}^2dx+C.\end{eqnarray*}
\begin{eqnarray*}& & \frac{d}{dt}\int_{\Omega}u_4dx+\delta\int_{\Omega}u_4dx+g\int_{\Omega}u_{4}^2dx\\[5pt] & & =\xi \int_{\Omega}u_2dx+g\int_{\Omega}u_4 dx\\[5pt] & & \leq \xi \int_{\Omega}u_2dx+ \frac{g}{2}\int_{\Omega}u_{4}^2dx+C.\end{eqnarray*}
Since
 $L^1(\Omega)$
-norm of
$L^1(\Omega)$
-norm of
 $u_2$
is uniformly bounded, it follows that
$u_2$
is uniformly bounded, it follows that
 \[\frac{d}{dt}\int_{\Omega}u_4dx+\delta\int_{\Omega}u_4dx\leq C.\]
\[\frac{d}{dt}\int_{\Omega}u_4dx+\delta\int_{\Omega}u_4dx\leq C.\]
Thus, we obtain the desired
 $L^1(\Omega)$
-estimate for
$L^1(\Omega)$
-estimate for
 $u_4$
.
$u_4$
.
A direct consequence of Lemma 4.1 is that when the space dimension is equal to
 $n=1$
, from the general theory of parabolic equations (for example, See Lemma 2.6 in [Reference Caceres and Canizo5] or [Reference Bocccardo and Gallouet4]), we immediately see that S, R, I and B are uniformly bounded in Q.
$n=1$
, from the general theory of parabolic equations (for example, See Lemma 2.6 in [Reference Caceres and Canizo5] or [Reference Bocccardo and Gallouet4]), we immediately see that S, R, I and B are uniformly bounded in Q.
When the space dimension is greater than 1, the derivation is much more complicated. In the derivation of various energy estimates, the following Young’s inequality with a small parameter
 $\varepsilon>0$
will be used frequently: for any
$\varepsilon>0$
will be used frequently: for any
 $a, b\geq 0$
,
$a, b\geq 0$
,
 \[ ab\leq \frac{\varepsilon a^{p}}{p}+\frac{b^{q}}{q\varepsilon^{q-1}},\]
\[ ab\leq \frac{\varepsilon a^{p}}{p}+\frac{b^{q}}{q\varepsilon^{q-1}},\]
where
 \[ \frac{1}{p}+\frac{1}{q}=1, p, q \in (1, \infty).\]
\[ \frac{1}{p}+\frac{1}{q}=1, p, q \in (1, \infty).\]
Lemma 4.2. Under the condition H(2.1)–H(2.3), there exists a constant C such that
 \[ \sup_{t>0}\int_{\Omega}[S^{1+r}+I^{1+2}+R^{1+r}+B^{1+r}]dx\leq C,\]
\[ \sup_{t>0}\int_{\Omega}[S^{1+r}+I^{1+2}+R^{1+r}+B^{1+r}]dx\leq C,\]
where
 $r\in (0,\frac{1}{n-1})$
is arbitrary and C depends only on known data.
$r\in (0,\frac{1}{n-1})$
is arbitrary and C depends only on known data.
Proof Keep in mind that we shall always derive an estimate for S,I and R as a first step. The second step for estimating B will be followed easily once we have an estimate for I by equation (1.4).
We use the standard energy method to derive the estimate. We multiply equation (2.1) by
 $u_1^r$
and equation (2.3) by
$u_1^r$
and equation (2.3) by
 $R^r$
, respectively, and then integrate ove
$R^r$
, respectively, and then integrate ove
 $\Omega$
to obtain
$\Omega$
to obtain
 \begin{eqnarray*}& & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}S^{1+r}dx +d_0r\int_{\Omega}S^{r-1}|\nabla S|^2dx\\[5pt] & & +\beta_1\int_{\Omega}S^{1+r}Idx+\beta_2\int_{\Omega}S^{1+r}h(B)dx+d\int_{\Omega}S^{1+r}dx\\[5pt] & & \leq \int_{\Omega} S^rb dx +\sigma\int_{\Omega}RS^r dx\\[5pt] & & \leq \varepsilon \int_{\Omega}S^{1+r}dx +C(\varepsilon)\int_{\Omega}b^{1+r}dx +{\sigma}\int_{\Omega}\left[\frac{r}{r+1}S^{1+r}+\frac{1}{r+1}R^{1+r}\right] dx.\\[5pt] & & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}R^{1+r}dx +d_0r\int_{\Omega}R^{r-1}|\nabla R|^2dx +(d+\sigma)\int_{\Omega}R^{1+r}dx\\[5pt] & & \leq \gamma\int_{\Omega} IR^r dx \\[5pt] & & \leq \gamma\int_{\Omega}\left[\frac{r}{1+r}R^{1+r}+\frac{1}{1+r}I^{1+r}\right] dx.\end{eqnarray*}
\begin{eqnarray*}& & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}S^{1+r}dx +d_0r\int_{\Omega}S^{r-1}|\nabla S|^2dx\\[5pt] & & +\beta_1\int_{\Omega}S^{1+r}Idx+\beta_2\int_{\Omega}S^{1+r}h(B)dx+d\int_{\Omega}S^{1+r}dx\\[5pt] & & \leq \int_{\Omega} S^rb dx +\sigma\int_{\Omega}RS^r dx\\[5pt] & & \leq \varepsilon \int_{\Omega}S^{1+r}dx +C(\varepsilon)\int_{\Omega}b^{1+r}dx +{\sigma}\int_{\Omega}\left[\frac{r}{r+1}S^{1+r}+\frac{1}{r+1}R^{1+r}\right] dx.\\[5pt] & & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}R^{1+r}dx +d_0r\int_{\Omega}R^{r-1}|\nabla R|^2dx +(d+\sigma)\int_{\Omega}R^{1+r}dx\\[5pt] & & \leq \gamma\int_{\Omega} IR^r dx \\[5pt] & & \leq \gamma\int_{\Omega}\left[\frac{r}{1+r}R^{1+r}+\frac{1}{1+r}I^{1+r}\right] dx.\end{eqnarray*}
Similarly for I, we have
 \begin{eqnarray*}& & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}I^{1+r}dx +d_0r\int_{\Omega}I^{r-1}|\nabla I|^2dx+(d+\gamma)\int_{\Omega}I^{1+r}dx\\[5pt] & & \leq \beta_1\int_{\Omega}SI^{1+r}dx+\beta_2\int_{\Omega}SI^r h(B)dx\\[5pt] & & :=J_1 +J_2.\end{eqnarray*}
\begin{eqnarray*}& & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}I^{1+r}dx +d_0r\int_{\Omega}I^{r-1}|\nabla I|^2dx+(d+\gamma)\int_{\Omega}I^{1+r}dx\\[5pt] & & \leq \beta_1\int_{\Omega}SI^{1+r}dx+\beta_2\int_{\Omega}SI^r h(B)dx\\[5pt] & & :=J_1 +J_2.\end{eqnarray*}
 \begin{eqnarray*}& & J_1\leq \beta_1\int_{\Omega}[\frac{\varepsilon_1}{1+r}S^{1+r}I +\frac{r}{(1+r)\varepsilon_1^{\frac{1}{r}}}I^{1+2r}]dx\\[5pt] & & J_2\leq \beta_2\int_{\Omega}[S^{1+r}h(B)+I^{1+r}]dx,\end{eqnarray*}
\begin{eqnarray*}& & J_1\leq \beta_1\int_{\Omega}[\frac{\varepsilon_1}{1+r}S^{1+r}I +\frac{r}{(1+r)\varepsilon_1^{\frac{1}{r}}}I^{1+2r}]dx\\[5pt] & & J_2\leq \beta_2\int_{\Omega}[S^{1+r}h(B)+I^{1+r}]dx,\end{eqnarray*}
where we have used the fact
 $0\leq h(B)\leq 1$
for the second estimate.
$0\leq h(B)\leq 1$
for the second estimate.
We choose
 $\varepsilon_1=1+r$
and then add up the estimates for S,I and R to obtain
$\varepsilon_1=1+r$
and then add up the estimates for S,I and R to obtain
 \begin{eqnarray*}& & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx +d_0r\int_{\Omega}[S^{r-1}|\nabla S|^2+I^{r-1}|\nabla I|^2+R^{r-1}|\nabla R|^2dx\\[5pt] & & +\frac{d}{2}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx\\[5pt] & & \leq C_1\int_{\Omega}I^{1+2r}dx+C_2\int_{\Omega}b^{1+r}dx.\end{eqnarray*}
\begin{eqnarray*}& & \frac{1}{1+r}\frac{d}{dt}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx +d_0r\int_{\Omega}[S^{r-1}|\nabla S|^2+I^{r-1}|\nabla I|^2+R^{r-1}|\nabla R|^2dx\\[5pt] & & +\frac{d}{2}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx\\[5pt] & & \leq C_1\int_{\Omega}I^{1+2r}dx+C_2\int_{\Omega}b^{1+r}dx.\end{eqnarray*}
Now, we recall a Gagliardo–Nirenberg’s inequality
 \[||u||_{L^{p}(\Omega)}\leq C||\nabla u||_{L^{q}(\Omega)}^{\theta}||u||_{L^{s}(\Omega)}^{1-\theta}+C||u||_{L^1} ,\]
\[||u||_{L^{p}(\Omega)}\leq C||\nabla u||_{L^{q}(\Omega)}^{\theta}||u||_{L^{s}(\Omega)}^{1-\theta}+C||u||_{L^1} ,\]
where C depends only on n and
 $\Omega$
,
$\Omega$
,
 $p, q, s, \theta$
satisfy
$p, q, s, \theta$
satisfy
 $0\leq \theta<1, 1\leq p<\infty,$
and
$0\leq \theta<1, 1\leq p<\infty,$
and
 \[ \frac{1}{p}=\theta\left(\frac{1}{q}-\frac{1}{n}\right)+(1-\theta)\frac{1}{s}.\]
\[ \frac{1}{p}=\theta\left(\frac{1}{q}-\frac{1}{n}\right)+(1-\theta)\frac{1}{s}.\]
We choose
 $q=2$
and
$q=2$
and
 $s=1$
, then we see that, for
$s=1$
, then we see that, for
 $p=\frac{2(1+2r)}{1+r}$
and
$p=\frac{2(1+2r)}{1+r}$
and
 $\theta=\frac{n(1+3r)}{(n+2)(1+2r)}$
,
$\theta=\frac{n(1+3r)}{(n+2)(1+2r)}$
,
Note that by Lemma 4.1, for
 $u=I^{\frac{1+r}{2}}$
with
$u=I^{\frac{1+r}{2}}$
with
 $r\leq 1$
, then
$r\leq 1$
, then
 \[ ||u||_{L^{1}(\Omega)}\leq C.\]
\[ ||u||_{L^{1}(\Omega)}\leq C.\]
Moreover,
 \[ |\nabla u|^2=r^2 I^{r-1}|\nabla I|^2.\]
\[ |\nabla u|^2=r^2 I^{r-1}|\nabla I|^2.\]
If we apply Gagliardo–Nirenberg’s inequality to obtain
 \begin{eqnarray*}& & \int_{\Omega}|u|^p dx\leq C||\nabla u||_{L^{2}(\Omega)}^{p\theta}+C\\\end{eqnarray*}
\begin{eqnarray*}& & \int_{\Omega}|u|^p dx\leq C||\nabla u||_{L^{2}(\Omega)}^{p\theta}+C\\\end{eqnarray*}
Note that if r satisfies
 \[0<r<\frac{1}{n-1},\]
\[0<r<\frac{1}{n-1},\]
then
 \[ \frac{p\theta}{2}<1.\]
\[ \frac{p\theta}{2}<1.\]
We see
 \begin{eqnarray*}& & \int_{\Omega}|u|^p dx\leq C||\nabla u||_{L^{2}(\Omega)}^{p\theta}+C\\[5pt] & & \leq \varepsilon\int_{\Omega}|\nabla u|^2dx +C(\varepsilon),\end{eqnarray*}
\begin{eqnarray*}& & \int_{\Omega}|u|^p dx\leq C||\nabla u||_{L^{2}(\Omega)}^{p\theta}+C\\[5pt] & & \leq \varepsilon\int_{\Omega}|\nabla u|^2dx +C(\varepsilon),\end{eqnarray*}
where
 $\varepsilon>0$
is arbitrary and
$\varepsilon>0$
is arbitrary and
 $C(\varepsilon)$
depends only on
$C(\varepsilon)$
depends only on
 $\varepsilon$
,
$\varepsilon$
,
 $||u||_{L^{1}(\Omega)}$
and known data.
$||u||_{L^{1}(\Omega)}$
and known data.
By choosing
 $\varepsilon$
sufficiently small, we obtain
$\varepsilon$
sufficiently small, we obtain
 \begin{eqnarray*}& & \frac{d}{dt}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx +\int_{\Omega}[S^{r-1}|\nabla S|^2+I^{r-1}|\nabla I|^2+R^{r-1}|\nabla R|^2dx\nonumber\\[5pt] & & +\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx\nonumber\\[5pt] & & \leq C_3\int_{\Omega}b^{1+r}dx\leq C_3b_0^{1+r}|\Omega|.\end{eqnarray*}
\begin{eqnarray*}& & \frac{d}{dt}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx +\int_{\Omega}[S^{r-1}|\nabla S|^2+I^{r-1}|\nabla I|^2+R^{r-1}|\nabla R|^2dx\nonumber\\[5pt] & & +\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx\nonumber\\[5pt] & & \leq C_3\int_{\Omega}b^{1+r}dx\leq C_3b_0^{1+r}|\Omega|.\end{eqnarray*}
Consequently, for any
 $r\in (0,\frac{1}{n-1})$
, we have
$r\in (0,\frac{1}{n-1})$
, we have
 \[ \sup_{0<t<\infty}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx\leq C,\]
\[ \sup_{0<t<\infty}\int_{\Omega}[S^{1+r}+I^{1+r}+R^{1+r}]dx\leq C,\]
where C depends only on known data.
The estimate for B follows easily from equation (1.4).
Proof of Theorem 2.3
: Let
 $k\geq 1$
. We follow the same calculations as in Lemma 4.2 to obtain
$k\geq 1$
. We follow the same calculations as in Lemma 4.2 to obtain
 \begin{eqnarray*}& & \frac{1}{1+k}\frac{d}{dt}\int_{\Omega}[S^{1+k}+I^{1+k}+R^{1+k}]dx +d_0k\int_{\Omega}[S^{k-1}|\nabla S|^2+I^{k-1}|\nabla I|^2+R^{k-1}|\nabla R|^2]dx\\[5pt] & & +\frac{d}{2}\int_{\Omega}[S^{1+k}+I^{1+k}+R^{1+k}]dx\\[5pt] & & \leq C_1\int_{\Omega}I^{1+2k}dx+C_2\int_{\Omega}b^{1+k}dx.\end{eqnarray*}
\begin{eqnarray*}& & \frac{1}{1+k}\frac{d}{dt}\int_{\Omega}[S^{1+k}+I^{1+k}+R^{1+k}]dx +d_0k\int_{\Omega}[S^{k-1}|\nabla S|^2+I^{k-1}|\nabla I|^2+R^{k-1}|\nabla R|^2]dx\\[5pt] & & +\frac{d}{2}\int_{\Omega}[S^{1+k}+I^{1+k}+R^{1+k}]dx\\[5pt] & & \leq C_1\int_{\Omega}I^{1+2k}dx+C_2\int_{\Omega}b^{1+k}dx.\end{eqnarray*}
Let
 $u= I^{\frac{1+k}{2}}$
. As in Lemma 4.2, if we have an estimate in
$u= I^{\frac{1+k}{2}}$
. As in Lemma 4.2, if we have an estimate in
 $L^1(\Omega)$
for a function u, then we can obtain an estimate for u in
$L^1(\Omega)$
for a function u, then we can obtain an estimate for u in
 $L^{p}(\Omega)$
with
$L^{p}(\Omega)$
with
 $p=\frac{2n}{2n-(n+2)\theta}$
and
$p=\frac{2n}{2n-(n+2)\theta}$
and
 $\theta=\frac{n(1+3k)}{(n+2)(1+2k)}$
as long as
$\theta=\frac{n(1+3k)}{(n+2)(1+2k)}$
as long as
 $k<\frac{1}{n-1}$
. For any
$k<\frac{1}{n-1}$
. For any
 $k\geq 1$
, after a finite number of steps, we obtain
$k\geq 1$
, after a finite number of steps, we obtain
 \[ \sup_{t\geq 0}\int_{\Omega}[S^{1+k}+I^{1+k}+R^{1+k}]dx\leq C(k),\]
\[ \sup_{t\geq 0}\int_{\Omega}[S^{1+k}+I^{1+k}+R^{1+k}]dx\leq C(k),\]
By the standard estimate for parabolic equation (see Lemma 2.6 in [Reference Caceres and Canizo5]), we obtain
 \[\sup_{t\geq 0}[||S||_{L^{\infty}(\Omega}+||I||_{L^{\infty}(\Omega)}+||R||_{L^{\infty}(\Omega)}]\leq C,\]
\[\sup_{t\geq 0}[||S||_{L^{\infty}(\Omega}+||I||_{L^{\infty}(\Omega)}+||R||_{L^{\infty}(\Omega)}]\leq C,\]
where C depends only on known data.
Once I is uniformly bounded, we can easily derive a uniform bound for B by using the standard theory of parabolic equation ([Reference Ladyzenskaja, Solonikov and Uralceva16]). This concludes the proof of Theorem 2.3.
With the global bound for U(x,t), we are ready to prove the asymptotic behaviour of the solution for the system (1.1)–(1.6).
Proof of Theorem 2.4 : From Theorem 2.3, we have
 \[ \sup_{Q}|S(x,t)|+\sup_{Q}|I(x,t)|+\sup_{Q}|R(x,t)|+\sup_{Q}|B(x,t)|\leq C,\]
\[ \sup_{Q}|S(x,t)|+\sup_{Q}|I(x,t)|+\sup_{Q}|R(x,t)|+\sup_{Q}|B(x,t)|\leq C,\]
where C depends only on known data.
We consider the following steady-state system corresponding to (2.1)–(2.6):
 \begin{eqnarray} -\nabla[d_{1\infty}(x)\nabla S] = b_0(x)-\beta_1SI-\beta_2S \cdot h(B)-dS+\sigma R,\end{eqnarray}
\begin{eqnarray} -\nabla[d_{1\infty}(x)\nabla S] = b_0(x)-\beta_1SI-\beta_2S \cdot h(B)-dS+\sigma R,\end{eqnarray}
 \begin{eqnarray} -\nabla[d_{2\infty}(x)\nabla I] = \beta_1SI+\beta_2S \cdot h(B)-(d+\gamma)I,\qquad\quad \end{eqnarray}
\begin{eqnarray} -\nabla[d_{2\infty}(x)\nabla I] = \beta_1SI+\beta_2S \cdot h(B)-(d+\gamma)I,\qquad\quad \end{eqnarray}
 \begin{eqnarray} -\nabla[d_{3\infty}(x)\nabla R] = \gamma I-(d+\sigma)R,\qquad\qquad\qquad\qquad\quad \end{eqnarray}
\begin{eqnarray} -\nabla[d_{3\infty}(x)\nabla R] = \gamma I-(d+\sigma)R,\qquad\qquad\qquad\qquad\quad \end{eqnarray}
 \begin{eqnarray} -\nabla[d_{4\infty}(x)\nabla B] = \xi I +gB(1-\frac{B}{K})-\delta B\qquad\qquad\qquad\;\; \end{eqnarray}
\begin{eqnarray} -\nabla[d_{4\infty}(x)\nabla B] = \xi I +gB(1-\frac{B}{K})-\delta B\qquad\qquad\qquad\;\; \end{eqnarray}
subject to the following boundary conditions:
 \begin{eqnarray} & & (\nabla_{\nu}S,\nabla_{\nu}I,\nabla_{\nu}R, \nabla_{\nu}B) = 0,\qquad x\in \partial \Omega, \end{eqnarray}
\begin{eqnarray} & & (\nabla_{\nu}S,\nabla_{\nu}I,\nabla_{\nu}R, \nabla_{\nu}B) = 0,\qquad x\in \partial \Omega, \end{eqnarray}
By using the same argument as for the system (2.1)–(2.6), we can show that the problem (4.1)–(4.5) has a weak solution
 $U^*(x)=(S^*(x),I^*(x),R^*(x),B^*(x))\in W_{2}^{1}(\Omega)\bigcap L^{\infty}(\Omega)$
. Moreover, since
$U^*(x)=(S^*(x),I^*(x),R^*(x),B^*(x))\in W_{2}^{1}(\Omega)\bigcap L^{\infty}(\Omega)$
. Moreover, since
 $b_0(x)\geq 0$
, the maximum principle implied that every weak solution is nonnegative on
$b_0(x)\geq 0$
, the maximum principle implied that every weak solution is nonnegative on
 $\Omega$
. Furthermore, since the coefficients
$\Omega$
. Furthermore, since the coefficients
 $d_{i\infty}\in C^{\alpha}(\bar{\Omega})$
, regularity theory for elliptic equation ([Reference Troianiello29]) yields
$d_{i\infty}\in C^{\alpha}(\bar{\Omega})$
, regularity theory for elliptic equation ([Reference Troianiello29]) yields
 \[ ||S^*||_{C^{1+\alpha}(\bar{\Omega}}+||I^*||_{C^{1+\alpha}(\bar{\Omega}}+||R^*||_{C^{1+\alpha}(\bar{\Omega}}+||B^*||_{C^{1+\alpha}(\bar{\Omega}}\leq C,\]
\[ ||S^*||_{C^{1+\alpha}(\bar{\Omega}}+||I^*||_{C^{1+\alpha}(\bar{\Omega}}+||R^*||_{C^{1+\alpha}(\bar{\Omega}}+||B^*||_{C^{1+\alpha}(\bar{\Omega}}\leq C,\]
where C depends only on known data.
We divide the rest of the proof into three steps. In the first step, we show that there is an upper bound
 $M_0$
which is independent of
$M_0$
which is independent of
 $\beta_1$
and
$\beta_1$
and
 $\beta_2$
. In the second step, we show that the steady-state system has a unique solution
$\beta_2$
. In the second step, we show that the steady-state system has a unique solution
 $(S_{\infty}(x), 0,0,0) $
if the parameters satisfy the conditions in Theorem 2.4, where
$(S_{\infty}(x), 0,0,0) $
if the parameters satisfy the conditions in Theorem 2.4, where
 $S_{\infty}(x)$
is a solution of (2.7)–(2.8). In the third step, we show that the U(x,t) converges to the steady-state solution
$S_{\infty}(x)$
is a solution of (2.7)–(2.8). In the third step, we show that the U(x,t) converges to the steady-state solution
 $U^*(x)$
in
$U^*(x)$
in
 $L^p(\Omega)$
for any
$L^p(\Omega)$
for any
 $p>1$
.
$p>1$
.
Step 1. There exists a constant
 $M_0$
which is independent
$M_0$
which is independent
 $\beta_1$
and
$\beta_1$
and
 $\beta_2$
such that
$\beta_2$
such that
 \[\sup_{\Omega}S^*(x)\leq M_0. \]
\[\sup_{\Omega}S^*(x)\leq M_0. \]
Indeed, it is easy to see
 \begin{eqnarray*} & & d\int_{\Omega}[S^*+I^*+R^*]dx=\int_{\Omega}b_0(x)dx, \\[5pt] & & (\delta-g)\int_{\Omega}B^*dx+g\int_{\Omega}B^{*2}dx=\xi\int_{\Omega}I^*dx. \end{eqnarray*}
\begin{eqnarray*} & & d\int_{\Omega}[S^*+I^*+R^*]dx=\int_{\Omega}b_0(x)dx, \\[5pt] & & (\delta-g)\int_{\Omega}B^*dx+g\int_{\Omega}B^{*2}dx=\xi\int_{\Omega}I^*dx. \end{eqnarray*}
Hence,
 $L^1$
-bound of
$L^1$
-bound of
 $(S^*,I^*,R^*,B^*)$
is independent of
$(S^*,I^*,R^*,B^*)$
is independent of
 $\beta_1$
and
$\beta_1$
and
 $\beta_2.$
Moreover,
$\beta_2.$
Moreover,
 \[ \int_{\Omega}B^{*2}dx\leq \frac{\xi}{g}\int_{\Omega}I^*dx.\]
\[ \int_{\Omega}B^{*2}dx\leq \frac{\xi}{g}\int_{\Omega}I^*dx.\]
To derive an
 $L^2$
-bound, we define
$L^2$
-bound, we define
 $V(x)=S(x)+I(x)$
. Then
$V(x)=S(x)+I(x)$
. Then
 \begin{eqnarray} -\nabla[d_{1\infty}(x)\nabla S] & = & b_0(x)-\beta_1SI-\beta_2S \cdot h(B)-dS+\sigma R,\end{eqnarray}
\begin{eqnarray} -\nabla[d_{1\infty}(x)\nabla S] & = & b_0(x)-\beta_1SI-\beta_2S \cdot h(B)-dS+\sigma R,\end{eqnarray}
 \begin{eqnarray} -\nabla[d_{2\infty}(x)\nabla V] & = & \nabla[(d_{1\infty}-d_{2\infty}\nabla S]+b_0(x)-dV+\sigma R, \end{eqnarray}
\begin{eqnarray} -\nabla[d_{2\infty}(x)\nabla V] & = & \nabla[(d_{1\infty}-d_{2\infty}\nabla S]+b_0(x)-dV+\sigma R, \end{eqnarray}
 \begin{eqnarray} -\nabla[d_{3\infty}(x)\nabla R] & = & \gamma I-(d+\sigma)R, \end{eqnarray}
\begin{eqnarray} -\nabla[d_{3\infty}(x)\nabla R] & = & \gamma I-(d+\sigma)R, \end{eqnarray}
 \begin{eqnarray} -\nabla[d_{4\infty}(x)\nabla B] & = & \xi I +gB\left(1-\frac{B}{K}\right)-\delta B,\end{eqnarray}
\begin{eqnarray} -\nabla[d_{4\infty}(x)\nabla B] & = & \xi I +gB\left(1-\frac{B}{K}\right)-\delta B,\end{eqnarray}
By using the energy method, we immediately obtain an
 $L^2(\Omega)$
-bound for S,V,R,B and the bound is independent
$L^2(\Omega)$
-bound for S,V,R,B and the bound is independent
 $\beta_1$
and
$\beta_1$
and
 $\beta_2$
. By using the same
$\beta_2$
. By using the same
 $L^{2,\mu}$
-argument, we can deduce an
$L^{2,\mu}$
-argument, we can deduce an
 $L^{\infty}(\Omega)$
bound for
$L^{\infty}(\Omega)$
bound for
 $S^*(x)$
and the bound is independent
$S^*(x)$
and the bound is independent
 $\beta_1$
and
$\beta_1$
and
 $\beta_2$
.
$\beta_2$
.
Step 2. We show that a steady-state solution
 $U^*(x)$
to (4.3)–(4.7) must equal to
$U^*(x)$
to (4.3)–(4.7) must equal to
 $(S_{\infty}(x),0,0,0)$
if the conditions in Theorem 2.4 hold.
$(S_{\infty}(x),0,0,0)$
if the conditions in Theorem 2.4 hold.
Let
 \[\hat{U}(x)=(\hat{S}(x), \hat{I}(x),\hat{R}(x), \hat{B})=(S^*(x)-S_{\infty}(x), I^*(x), R^*(x), B^*(x)), x\in \Omega.\]
\[\hat{U}(x)=(\hat{S}(x), \hat{I}(x),\hat{R}(x), \hat{B})=(S^*(x)-S_{\infty}(x), I^*(x), R^*(x), B^*(x)), x\in \Omega.\]
It is easy to see that
 $(\hat{S}, \hat{I}, \hat{R}, \hat{B})$
satisfies the following elliptic system (for convenience, we use
$(\hat{S}, \hat{I}, \hat{R}, \hat{B})$
satisfies the following elliptic system (for convenience, we use
 $I^*,R^*,B^*$
instead of
$I^*,R^*,B^*$
instead of
 $(\hat{I},\hat{R}, \hat{B})$
):
$(\hat{I},\hat{R}, \hat{B})$
):
 \begin{eqnarray} -\nabla[d_{1\infty}(x)\nabla \hat{S}] & = & -\beta_1[\hat{S}I^*+S_{\infty}I^*]-\beta_2[\hat{S} h(B^*)+S_{\infty}h(B^*)] -d\hat{S}+\sigma R^*,\end{eqnarray}
\begin{eqnarray} -\nabla[d_{1\infty}(x)\nabla \hat{S}] & = & -\beta_1[\hat{S}I^*+S_{\infty}I^*]-\beta_2[\hat{S} h(B^*)+S_{\infty}h(B^*)] -d\hat{S}+\sigma R^*,\end{eqnarray}
 \begin{eqnarray} -\nabla[d_{2\infty}(x)\nabla I^*] & = & \beta_1[\hat{S}I^*+S_{\infty}I^*]+\beta_2[\hat{S}\cdot h(B^*)+S_{\infty}h(B^*)]-(d+\gamma)I^*,\end{eqnarray}
\begin{eqnarray} -\nabla[d_{2\infty}(x)\nabla I^*] & = & \beta_1[\hat{S}I^*+S_{\infty}I^*]+\beta_2[\hat{S}\cdot h(B^*)+S_{\infty}h(B^*)]-(d+\gamma)I^*,\end{eqnarray}
 \begin{eqnarray} -\nabla[d_{3\infty}(x)\nabla R^*] & = & \gamma I^*-(d+\sigma)R^*, \end{eqnarray}
\begin{eqnarray} -\nabla[d_{3\infty}(x)\nabla R^*] & = & \gamma I^*-(d+\sigma)R^*, \end{eqnarray}
 \begin{eqnarray} -\nabla[d_{4\infty}(x)\nabla B^*] & = & \xi I +gB^*(1-\frac{B^*}{K})-\delta B \end{eqnarray}
\begin{eqnarray} -\nabla[d_{4\infty}(x)\nabla B^*] & = & \xi I +gB^*(1-\frac{B^*}{K})-\delta B \end{eqnarray}
subject to the following boundary conditions:
 \begin{eqnarray} & & (\nabla_{\nu}\hat{S},\nabla_{\nu}I^*,\nabla_{\nu}R^*, \nabla_{\nu}B^*) = 0,\qquad x\in \partial \Omega, \end{eqnarray}
\begin{eqnarray} & & (\nabla_{\nu}\hat{S},\nabla_{\nu}I^*,\nabla_{\nu}R^*, \nabla_{\nu}B^*) = 0,\qquad x\in \partial \Omega, \end{eqnarray}
We first use
 $L^1(\Omega)$
-estimate to show that the steady-state system (4.6)–(4.9) with homogeneous Neumann condition has a unique solution
$L^1(\Omega)$
-estimate to show that the steady-state system (4.6)–(4.9) with homogeneous Neumann condition has a unique solution
 $U_{\infty}(x)=(S_{\infty}(x),0,0,0)$
. From the elliptic equation (4.6), we multiply the sign function
$U_{\infty}(x)=(S_{\infty}(x),0,0,0)$
. From the elliptic equation (4.6), we multiply the sign function
 $sgn \hat{S}$
(one may use a smooth approximation of sign function first and then take the limit) to obtain the following estimates:
$sgn \hat{S}$
(one may use a smooth approximation of sign function first and then take the limit) to obtain the following estimates:
 \begin{eqnarray}& & d\int_{\Omega}|\hat{S}|dx+\int_{\Omega}[\beta_1|\hat{S}|I^*+\beta_2 |\hat{S}|h(B^*)]dx \nonumber\\[5pt] & & \leq \beta_1\int_{\Omega}S_{\infty}I^*dx+\beta_2\int_{\Omega}S_{\infty}h(B^*) dx+\sigma\int_{\Omega}R^* dx\nonumber\\[5pt] & & \leq \beta_1m_0\int_{\Omega}I^{*}dx+\frac{\beta_2m_0}{K}\int_{\Omega}B^{*}dx+\sigma\int_{\Omega}R^*dx,\end{eqnarray}
\begin{eqnarray}& & d\int_{\Omega}|\hat{S}|dx+\int_{\Omega}[\beta_1|\hat{S}|I^*+\beta_2 |\hat{S}|h(B^*)]dx \nonumber\\[5pt] & & \leq \beta_1\int_{\Omega}S_{\infty}I^*dx+\beta_2\int_{\Omega}S_{\infty}h(B^*) dx+\sigma\int_{\Omega}R^* dx\nonumber\\[5pt] & & \leq \beta_1m_0\int_{\Omega}I^{*}dx+\frac{\beta_2m_0}{K}\int_{\Omega}B^{*}dx+\sigma\int_{\Omega}R^*dx,\end{eqnarray}
where
 \[ m_0=\max_{\bar{\Omega}}S_{\infty}(x).\]
\[ m_0=\max_{\bar{\Omega}}S_{\infty}(x).\]
Similarly, from equation (4.7), we have
 \begin{eqnarray}& & (d+\gamma)\int_{\Omega}I^{*}dx \nonumber\\[5pt] & & \leq \beta_1 \int_{\Omega}[|\hat{S}|I^*+S_{\infty}I^{*}]dx+\beta_2\int_{\Omega}[|\hat{S}|h(B^*)+S_{\infty}h(B^*)]dx. \end{eqnarray}
\begin{eqnarray}& & (d+\gamma)\int_{\Omega}I^{*}dx \nonumber\\[5pt] & & \leq \beta_1 \int_{\Omega}[|\hat{S}|I^*+S_{\infty}I^{*}]dx+\beta_2\int_{\Omega}[|\hat{S}|h(B^*)+S_{\infty}h(B^*)]dx. \end{eqnarray}
From equations (4.8)–(4.9), we find
 \begin{eqnarray}& & (d+\sigma)\int_{\Omega}R^{*}dx \leq \gamma\int_{\Omega} I^{*}dx.\end{eqnarray}
\begin{eqnarray}& & (d+\sigma)\int_{\Omega}R^{*}dx \leq \gamma\int_{\Omega} I^{*}dx.\end{eqnarray}
 \begin{eqnarray}& & (\delta-g)\int_{\Omega}B^{*}dx \leq \xi\int_{\Omega}I^{*}dx.\end{eqnarray}
\begin{eqnarray}& & (\delta-g)\int_{\Omega}B^{*}dx \leq \xi\int_{\Omega}I^{*}dx.\end{eqnarray}
We add up the estimates (4.15)–(4.17) to obtain
 \begin{eqnarray*}& & d\int_{\Omega}|\hat{S}|dx +(d-2\beta_1m_0-\frac{2\beta_2m_0\xi}{K(\delta-g)})\int_{\Omega}I^{*}dx + d\int_{\Omega}R^{*}dx \leq 0,\end{eqnarray*}
\begin{eqnarray*}& & d\int_{\Omega}|\hat{S}|dx +(d-2\beta_1m_0-\frac{2\beta_2m_0\xi}{K(\delta-g)})\int_{\Omega}I^{*}dx + d\int_{\Omega}R^{*}dx \leq 0,\end{eqnarray*}
where we have used the estimate (4.18) for the
 $L^1$
-norm of
$L^1$
-norm of
 $B^*$
. If
$B^*$
. If
 \[ d>2\beta_1m_0+\frac{2\beta_2m_0\xi}{K(\delta-g)}, \]
\[ d>2\beta_1m_0+\frac{2\beta_2m_0\xi}{K(\delta-g)}, \]
then we conclude
 \[ \hat{S}(x)=I^*(x)=R^*(x)=0,\qquad x\in \Omega.\]
\[ \hat{S}(x)=I^*(x)=R^*(x)=0,\qquad x\in \Omega.\]
Consequently, the inequality (4.18) implied
 $B^*(x,t)=0$
on
$B^*(x,t)=0$
on
 $\Omega.$
$\Omega.$
When
 $d_1(x,t)$
depends on t, the above conditions for the parameters are not enough to prove U(x,t) converges to
$d_1(x,t)$
depends on t, the above conditions for the parameters are not enough to prove U(x,t) converges to
 $U^*(x)$
. We need a different set of conditions on parameters to prove the uniqueness of
$U^*(x)$
. We need a different set of conditions on parameters to prove the uniqueness of
 $U^*(x)$
via
$U^*(x)$
via
 $L^2$
-estimate. Indeed, we multiply equation (4.6) by
$L^2$
-estimate. Indeed, we multiply equation (4.6) by
 $\hat{S}$
and integrate over
$\hat{S}$
and integrate over
 $\Omega$
to obtain
$\Omega$
to obtain
 \begin{eqnarray}& & d_0\int_{\Omega}|\nabla \hat{S}|^2dx+d\int_{\Omega}\hat{S}^2dx+\beta_1\int_{\Omega}\hat{S}^2I^*dx +\beta_2\int_{\Omega}\hat{S}^2h(B^*)dx\nonumber\\[5pt] & & \leq \frac{\beta_1m_0}{2}\int_{\Omega}[\hat{S}^2+I^{*2}]dx+\frac{\beta_2m_0}{2K}\int_{\Omega}[\hat{S}^2+B^{*2}]dx+\sigma\int_{\Omega}[\varepsilon R^{*2}+\frac{1}{4\varepsilon}\hat{S}^2]dx,\end{eqnarray}
\begin{eqnarray}& & d_0\int_{\Omega}|\nabla \hat{S}|^2dx+d\int_{\Omega}\hat{S}^2dx+\beta_1\int_{\Omega}\hat{S}^2I^*dx +\beta_2\int_{\Omega}\hat{S}^2h(B^*)dx\nonumber\\[5pt] & & \leq \frac{\beta_1m_0}{2}\int_{\Omega}[\hat{S}^2+I^{*2}]dx+\frac{\beta_2m_0}{2K}\int_{\Omega}[\hat{S}^2+B^{*2}]dx+\sigma\int_{\Omega}[\varepsilon R^{*2}+\frac{1}{4\varepsilon}\hat{S}^2]dx,\end{eqnarray}
where we have used fact
 $h(B^*)\leq \frac{B^*}{K}$
and Cauchy–Schwarz’s inequality with a parameter
$h(B^*)\leq \frac{B^*}{K}$
and Cauchy–Schwarz’s inequality with a parameter
 $\varepsilon>0$
.
$\varepsilon>0$
.
Similarly, from equation (4.7), we have
 \begin{eqnarray}& & d_0\int_{\Omega}|\nabla I^*|^2dx+(d+\gamma)\int_{\Omega}I^{*2}dx \leq \beta_1M_0\int_{\Omega}I^{*2}dx+\frac{\beta_2M_0}{2K}\int_{\Omega}[I^{*2}+B^{*2}]dx,\end{eqnarray}
\begin{eqnarray}& & d_0\int_{\Omega}|\nabla I^*|^2dx+(d+\gamma)\int_{\Omega}I^{*2}dx \leq \beta_1M_0\int_{\Omega}I^{*2}dx+\frac{\beta_2M_0}{2K}\int_{\Omega}[I^{*2}+B^{*2}]dx,\end{eqnarray}
From equations (4.8)–(4.9), we find
 \begin{eqnarray}& & d_0\int_{\Omega}|\nabla R^*|^2dx+(d+\sigma)\int_{\Omega}R^{*2}dx\leq \gamma\int_{\Omega}[\varepsilon I^{*2}+\frac{1}{4\varepsilon}R^{*2}]dx;\end{eqnarray}
\begin{eqnarray}& & d_0\int_{\Omega}|\nabla R^*|^2dx+(d+\sigma)\int_{\Omega}R^{*2}dx\leq \gamma\int_{\Omega}[\varepsilon I^{*2}+\frac{1}{4\varepsilon}R^{*2}]dx;\end{eqnarray}
 \begin{eqnarray}& & d_0\int_{\Omega}|\nabla B^*|^2dx+(\delta-g)\int_{\Omega}B^{*2}dx\leq \frac{\xi}{2}\int_{\Omega}[ B^{*2}+I^{*2}]dx.\end{eqnarray}
\begin{eqnarray}& & d_0\int_{\Omega}|\nabla B^*|^2dx+(\delta-g)\int_{\Omega}B^{*2}dx\leq \frac{\xi}{2}\int_{\Omega}[ B^{*2}+I^{*2}]dx.\end{eqnarray}
From the estimate (4.18), we see
 \[ (\delta-g-\frac{\xi}{2})\int_{\Omega}B^{*2}dx\leq\frac{\xi}{2}\int_{\Omega}I^{*2}dx.\]
\[ (\delta-g-\frac{\xi}{2})\int_{\Omega}B^{*2}dx\leq\frac{\xi}{2}\int_{\Omega}I^{*2}dx.\]
If we combine the estimates (4.15)–(4.18) and choose
 $\varepsilon$
sufficiently close to 1 to conclude that
$\varepsilon$
sufficiently close to 1 to conclude that
 \[ \hat{S}(x)=I^*(x)=R^*(x)=0,\qquad x\in \Omega\]
\[ \hat{S}(x)=I^*(x)=R^*(x)=0,\qquad x\in \Omega\]
provided that
 \[ d>\frac{3\beta_1m_0}{2}+\frac{\beta_2m_0\xi}{2K(\delta-g-\frac{\xi}{2})}+\frac{1}{4}max\{\sigma, \gamma\},\, \delta-g>\frac{\xi}{2}. \]
\[ d>\frac{3\beta_1m_0}{2}+\frac{\beta_2m_0\xi}{2K(\delta-g-\frac{\xi}{2})}+\frac{1}{4}max\{\sigma, \gamma\},\, \delta-g>\frac{\xi}{2}. \]
The inequality (4.18) yields
 \[ B^*(x)=0,\qquad x\in \Omega.\]
\[ B^*(x)=0,\qquad x\in \Omega.\]
That is
 \[ U^*(x)=(S_{\infty}(x),0,0,0),\qquad x\in \Omega.\]
\[ U^*(x)=(S_{\infty}(x),0,0,0),\qquad x\in \Omega.\]
Consequently,
 $M_0=m_0$
.
$M_0=m_0$
.
Step 3: In this step, we show that U(x,t) converges to the steady-state solution
 $U^*(x)=(S_{\infty}(x),0,0,0)$
as
$U^*(x)=(S_{\infty}(x),0,0,0)$
as
 $t\rightarrow \infty$
.
$t\rightarrow \infty$
.
For convenience, we set
 \[ W(x,t):=(w_1, w_2, w_3, w_4)= U(x,t)-U^*(x)=(S-S_{\infty},I,R, B), (x,t)\in Q.\]
\[ W(x,t):=(w_1, w_2, w_3, w_4)= U(x,t)-U^*(x)=(S-S_{\infty},I,R, B), (x,t)\in Q.\]
A direct calculation shows that W(x,t) satisfies the following system:
 \begin{eqnarray}& & w_{1t}-\nabla[d_1(x,t)\nabla w_1]=m_1(x,t)+f_1(x,t,U)-f_1(x,U^*), (x,t)\in Q,\end{eqnarray}
\begin{eqnarray}& & w_{1t}-\nabla[d_1(x,t)\nabla w_1]=m_1(x,t)+f_1(x,t,U)-f_1(x,U^*), (x,t)\in Q,\end{eqnarray}
 \begin{eqnarray} & & w_{2t}-\nabla[d_2(x,t)\nabla w_2]=m_2(x,t)+f_2(U)-f_2(U^*),\quad (x,t)\in Q, \end{eqnarray}
\begin{eqnarray} & & w_{2t}-\nabla[d_2(x,t)\nabla w_2]=m_2(x,t)+f_2(U)-f_2(U^*),\quad (x,t)\in Q, \end{eqnarray}
 \begin{eqnarray}& & w_{3t}-\nabla[d_3(x,t)\nabla w_3]=m_3(x,t)+f_3(U)-f_3(U^*),\quad (x,t)\in Q,\end{eqnarray}
\begin{eqnarray}& & w_{3t}-\nabla[d_3(x,t)\nabla w_3]=m_3(x,t)+f_3(U)-f_3(U^*),\quad (x,t)\in Q,\end{eqnarray}
 \begin{eqnarray} & & w_{4t}-\nabla[d_4(x,t)\nabla w_4]=m_4(x,t)+f_4(U)-f_4(U^*),\quad (x,t)\in Q, \end{eqnarray}
\begin{eqnarray} & & w_{4t}-\nabla[d_4(x,t)\nabla w_4]=m_4(x,t)+f_4(U)-f_4(U^*),\quad (x,t)\in Q, \end{eqnarray}
subject to the boundary conditions:
 \begin{eqnarray} & & \nabla_{\nu}(w_1,w_2,w_3,w_4)=0,\qquad (x,t)\in \partial \Omega\times (0,\infty),\end{eqnarray}
\begin{eqnarray} & & \nabla_{\nu}(w_1,w_2,w_3,w_4)=0,\qquad (x,t)\in \partial \Omega\times (0,\infty),\end{eqnarray}
where
 \[ m_i(x,t)=\nabla[(d_i(x,t)-d_{i\infty}(x))\nabla u_{i}^{*}], i=1, \cdots, 4.\]
\[ m_i(x,t)=\nabla[(d_i(x,t)-d_{i\infty}(x))\nabla u_{i}^{*}], i=1, \cdots, 4.\]
When
 $d_i(x,t)$
is independent of t, we see
$d_i(x,t)$
is independent of t, we see
 $m_i(x,t)=0$
in Q. For this case, we can use the same method as in Step 2 to show that W(x,t) converges to
$m_i(x,t)=0$
in Q. For this case, we can use the same method as in Step 2 to show that W(x,t) converges to
 $U^*(x)$
in
$U^*(x)$
in
 $L^1(\Omega)$
if the conditions in Step 2 hold.
$L^1(\Omega)$
if the conditions in Step 2 hold.
Now, we consider the general case when
 $d_i$
depends on t. Note that
$d_i$
depends on t. Note that
 $d_{i\infty}(x)$
are uniformly bounded in
$d_{i\infty}(x)$
are uniformly bounded in
 $C^{\alpha}(\bar{\Omega})$
, we know that
$C^{\alpha}(\bar{\Omega})$
, we know that
 $\nabla u_i^*$
is uniformly bounded in
$\nabla u_i^*$
is uniformly bounded in
 $\Omega$
. Hence, for each i,
$\Omega$
. Hence, for each i,
 \[|\int_{\Omega}m_i(x) w_i dx|\leq \varepsilon_1\int_{\Omega}|\nabla w_i|^2dx+C(\varepsilon_1)\int_{\Omega}(d_i-d_{i\infty})^2dx,\]
\[|\int_{\Omega}m_i(x) w_i dx|\leq \varepsilon_1\int_{\Omega}|\nabla w_i|^2dx+C(\varepsilon_1)\int_{\Omega}(d_i-d_{i\infty})^2dx,\]
where
 $\varepsilon_1$
is a small parameter.
$\varepsilon_1$
is a small parameter.
For any
 $t_0>0$
. Let
$t_0>0$
. Let
 $Q(t_0)=\Omega\times [t_0,\infty)$
and
$Q(t_0)=\Omega\times [t_0,\infty)$
and
 \[ m_0^*=\sup_{Q(t_0)}s^*(x,t).\]
\[ m_0^*=\sup_{Q(t_0)}s^*(x,t).\]
By using the same argument as in Step 1, we see
 $m_0^*$
is independent of
$m_0^*$
is independent of
 $\beta_1$
and
$\beta_1$
and
 $\beta_2$
.
$\beta_2$
.
Observe
 $h(0)=0$
, hence
$h(0)=0$
, hence
 \begin{eqnarray*}& & f_1(x,t,U)-f_1(x,U^*)\\[5pt] & & =b(x,t)-b_0(x)-\beta_1[w_1w_2+S_{\infty}w_2]-\beta_2[w_1h(B)+S_{\infty}(h(B))]-d w_1+\sigma w_3.\end{eqnarray*}
\begin{eqnarray*}& & f_1(x,t,U)-f_1(x,U^*)\\[5pt] & & =b(x,t)-b_0(x)-\beta_1[w_1w_2+S_{\infty}w_2]-\beta_2[w_1h(B)+S_{\infty}(h(B))]-d w_1+\sigma w_3.\end{eqnarray*}
Moreover, from the definition of h(B),
 \[ |h(B)|\leq \frac{|w_4|}{K}.\]
\[ |h(B)|\leq \frac{|w_4|}{K}.\]
It follows that
 \begin{eqnarray*}& & |w_1 S_{\infty}w_2|\leq \frac{m_0}{2}[w_1^2+w_2^2];\\[5pt] & & |w_1S_{\infty}h(w_4)|\leq \frac{m_0}{2K}(w_1^2+w_4^2).\end{eqnarray*}
\begin{eqnarray*}& & |w_1 S_{\infty}w_2|\leq \frac{m_0}{2}[w_1^2+w_2^2];\\[5pt] & & |w_1S_{\infty}h(w_4)|\leq \frac{m_0}{2K}(w_1^2+w_4^2).\end{eqnarray*}
Now, we use the standard energy estimate to obtain
 \begin{eqnarray*} & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_1^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_1|^2dx+(d-2\varepsilon_1)\int_{\Omega}w_1^2dx\\[5pt] & & \leq \frac{\beta_1m_0}{2}\int_{\Omega}[w_1^2+w_2^2]dx+\frac{m_0\beta_2}{2K}\int_{\Omega}(w_1^2+w_4^2)]dx\\[5pt] & & + C_1(\varepsilon_1)\int_{\Omega}[(b-b_0)^2+(d_1-d_{1\infty})^2]dx+\sigma\int_{\Omega}[\varepsilon_2 w_3^2+\frac{1}{4\varepsilon_2}w_1^2]dx, \end{eqnarray*}
\begin{eqnarray*} & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_1^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_1|^2dx+(d-2\varepsilon_1)\int_{\Omega}w_1^2dx\\[5pt] & & \leq \frac{\beta_1m_0}{2}\int_{\Omega}[w_1^2+w_2^2]dx+\frac{m_0\beta_2}{2K}\int_{\Omega}(w_1^2+w_4^2)]dx\\[5pt] & & + C_1(\varepsilon_1)\int_{\Omega}[(b-b_0)^2+(d_1-d_{1\infty})^2]dx+\sigma\int_{\Omega}[\varepsilon_2 w_3^2+\frac{1}{4\varepsilon_2}w_1^2]dx, \end{eqnarray*}
where
 $\varepsilon_1$
and
$\varepsilon_1$
and
 $\varepsilon_2$
are arbitrarily constants.
$\varepsilon_2$
are arbitrarily constants.
Similarly, since
 $f_2(U^*)=f_3(U^*)=f_4(U^*)=0$
, we have
$f_2(U^*)=f_3(U^*)=f_4(U^*)=0$
, we have
 \begin{eqnarray*} & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_2^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_2|^2dx+(d+\gamma-\varepsilon_1)\int_{\Omega}w_2^2dx\\[5pt] & & \leq \beta_1m_0^*\int_{\Omega}w_2^2dx+\frac{\beta_2m_0^*}{2K}\int_{\Omega}[(w_2^2+w_4^2)]dx+ C_2(\varepsilon_1)\int_{\Omega}[(d_2-d_{2\infty})^2]dx;\\[5pt] & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_3^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_3|^2dx+(d+\sigma-\varepsilon_1)\int_{\Omega}w_1^2dx\\[5pt] & & \leq \gamma\int_{\Omega}[\varepsilon_2 w_2^2+\frac{1}{4\varepsilon_2}w_3^2]dx+C_3(\varepsilon_1)\int_{\Omega}(d_{3}-d_{3\infty})^2dx;\\[5pt] & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_4^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_4|^2dx+(\delta-g)\int_{\Omega}w_4^2dx\\[5pt] & & \leq \frac{\xi}{2}\int_{\Omega}[w_2^2+w_4^2]dx+C_4(\varepsilon_1)\int_{\Omega}(d_4-d_{4\infty})^2dx. \end{eqnarray*}
\begin{eqnarray*} & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_2^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_2|^2dx+(d+\gamma-\varepsilon_1)\int_{\Omega}w_2^2dx\\[5pt] & & \leq \beta_1m_0^*\int_{\Omega}w_2^2dx+\frac{\beta_2m_0^*}{2K}\int_{\Omega}[(w_2^2+w_4^2)]dx+ C_2(\varepsilon_1)\int_{\Omega}[(d_2-d_{2\infty})^2]dx;\\[5pt] & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_3^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_3|^2dx+(d+\sigma-\varepsilon_1)\int_{\Omega}w_1^2dx\\[5pt] & & \leq \gamma\int_{\Omega}[\varepsilon_2 w_2^2+\frac{1}{4\varepsilon_2}w_3^2]dx+C_3(\varepsilon_1)\int_{\Omega}(d_{3}-d_{3\infty})^2dx;\\[5pt] & & \frac{d}{dt}\frac{1}{2}\int_{\Omega}w_4^2dx +(d_0-\varepsilon_1)\int_{\Omega}|\nabla w_4|^2dx+(\delta-g)\int_{\Omega}w_4^2dx\\[5pt] & & \leq \frac{\xi}{2}\int_{\Omega}[w_2^2+w_4^2]dx+C_4(\varepsilon_1)\int_{\Omega}(d_4-d_{4\infty})^2dx. \end{eqnarray*}
Suppose the parameters in the system (1.1)–(1.4) satisfy the following conditions:
 \begin{eqnarray} & & d>\frac{1}{4}\max\{ \sigma, \gamma\}+ \frac{3\beta_1M_0}{2}+\frac{\beta_2M_0\xi}{2K(\delta-g-\frac{\xi}{2})}, \end{eqnarray}
\begin{eqnarray} & & d>\frac{1}{4}\max\{ \sigma, \gamma\}+ \frac{3\beta_1M_0}{2}+\frac{\beta_2M_0\xi}{2K(\delta-g-\frac{\xi}{2})}, \end{eqnarray}
 \begin{eqnarray} & & \delta-g>\frac{\xi}{2}, \end{eqnarray}
\begin{eqnarray} & & \delta-g>\frac{\xi}{2}, \end{eqnarray}
where
 $M_0=\max\{m_0, m_0^*\}$
.
$M_0=\max\{m_0, m_0^*\}$
.
We choose
 $\varepsilon_1$
sufficiently small and
$\varepsilon_1$
sufficiently small and
 $\varepsilon_2$
sufficiently close to 1, then we combine the above estimates to see that there exists a constant
$\varepsilon_2$
sufficiently close to 1, then we combine the above estimates to see that there exists a constant
 $\alpha_1>0$
such that
$\alpha_1>0$
such that
 \[ Y'(t)+\alpha_1 Y(t)\leq C G(t),\]
\[ Y'(t)+\alpha_1 Y(t)\leq C G(t),\]
where
 \[ Y(t)=\sum_{i=1}^{4}\int_{\Omega}w_i^2dx, G(t)=\int_{\Omega}[(b-b_0)^2+\sum_{i=1}^{4}(d_i-d_{i\infty})^2]dx.\]
\[ Y(t)=\sum_{i=1}^{4}\int_{\Omega}w_i^2dx, G(t)=\int_{\Omega}[(b-b_0)^2+\sum_{i=1}^{4}(d_i-d_{i\infty})^2]dx.\]
Since G(t) converges to 0 as
 $\rightarrow \infty$
, we conclude that
$\rightarrow \infty$
, we conclude that
 \[ \lim_{t\rightarrow \infty}Y(t)=0,\]
\[ \lim_{t\rightarrow \infty}Y(t)=0,\]
which implies, for any
 $p>1$
,
$p>1$
,
 \[ \lim_{t\rightarrow \infty}||U-U^*||_{L^{p}(\Omega)}=0\]
\[ \lim_{t\rightarrow \infty}||U-U^*||_{L^{p}(\Omega)}=0\]
since U(x,t) and
 $U^*(x)$
are uniformly bounded.
$U^*(x)$
are uniformly bounded.
Finally, we can choose
 $m_0^*$
sufficiently close to
$m_0^*$
sufficiently close to
 $m_0$
as long as
$m_0$
as long as
 $t_0$
is sufficiently large. Therefore, the convergence of U(x,t) to
$t_0$
is sufficiently large. Therefore, the convergence of U(x,t) to
 $U^*(x)$
holds if the conditions for parameters in Theorem 2.4 hold.
$U^*(x)$
holds if the conditions for parameters in Theorem 2.4 hold.
The proof of Theorem 2.4 is completed.
5 Conclusion
In this paper, we studied a mathematical model for the Cholera epidemic without lifetime immunity. The model equations are governed by a coupled reaction–diffusion system with different diffusion coefficients for each species. We established the global well-posedness for the coupled reaction–diffusion system under a certain condition on known data. Moreover, the long-time behaviour of the solution is obtained for any space dimension n. Particularly, we prove that there is a global attractor for the system under appropriate conditions on known data. These results justify the mathematical model and provide scientists a deeper understanding of the dynamics of interaction between bacteria and susceptible, infected and recovered human hosts. The mathematical model with the help of real data analysis provides a scientific foundation for policymakers to make better decisions for the general public in health and medical sciences. The main tools used in this paper come from some delicate theories for elliptic and parabolic equations. The method developed in this paper can be used to study other models such as the avian influenza for birds.
Acknowledgements
This paper was motivated by some open questions raised by Professor K. Yamazaki from Texas Tech University in a seminar at Washington State University. The author would like to thank Professor Yamazaki and Professor X. Wang at Washington State University for some interesting discussions. Many thanks also go to Mr. Brian Yin, Esq., from Law Firm Clifford Chance US LLP, who helped to edit the original paper. A special thank goes to anonymous referees for their expertness comments and suggestions which improved the original paper.
Added in the Proofreading
After this paper was posted in arXiv on 17 November 2020, a number of colleagues expressed their interests for the paper and sent me numerous comments and suggestions. In particular, Professor Jeffrey Morgan at University of Houston and Professor B. Q. Tang from University of Graz provided me their recent very interesting papers on reaction–diffusion equations ([Reference Klements, Morgan and Tang14, Reference Morgan and Tang22]). The author thanks them for their comments and suggestions.



