






1. Introduction
When an intense electrical current is injected into a liquid metal domain by using a thin wire, fluid motion is generated by the Lorentz force in the liquid metal. These flows are called electrovortex flows (EVFs) and the reader is referred to Bojarevičs et al. (Reference Bojarevičs, Freibergs, Shilova and Shcherbinin1989) for an extensive review and early references on this topic.
Recently, different types of EVFs have been investigated within the applied context of liquid metal batteries (LMBs); see Kelley & Weier (Reference Kelley and Weier2018) for a review. The idea is that EVFs can enhance the mixing of the alloy layer and, hence, contribute to improving the battery efficiency. This idea was first proposed in Kelley & Sadoway (Reference Kelley and Sadoway2014) and triggered the numerical studies of Ashour et al. (Reference Ashour, Kelley, Salas, Starace, Weber and Weier2018), Weber et al. (Reference Weber, Nimtz, Personnettaz, Salas and Weier2018), Herreman et al. (Reference Herreman, Bénard, Nore, Personnettaz, Cappanera and Guermond2020). Small vertical magnetic fields can significantly modify the EVF, giving it a swirling character (see, for example, Millere, Sharamkin & Shcherbinin Reference Millere, Sharamkin and Shcherbinin1980; Bojarevics, Millere & Chaikovsky Reference Bojarevics, Millere and Chaikovsky1981; Davidson et al. Reference Davidson, Kinnear, Lingwood, Short and He1999; Davidson Reference Davidson2001). In LMBs it was shown by Weber et al. (Reference Weber, Nimtz, Personnettaz, Weier and Sadoway2020), Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) that such swirling EVFs are intense enough to enhance mixing.
In addition to being dedicated to the analysis of alloy mixing in LMBs, Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) also reports results obtained by performing highly resolved three-dimensional (3-D) numerical simulations of turbulent swirling EVFs using the code SFEMaNS (Guermond et al. Reference Guermond, Laguerre, Léorat and Nore2007, Reference Guermond, Laguerre, Léorat and Nore2009; Cappanera et al. Reference Cappanera, Guermond, Herreman and Nore2018). These simulations have been done at high Reynolds numbers (up to  $10^{4}$) without using any turbulence model. Other numerical studies on EVFs often use turbulence models (
$10^{4}$) without using any turbulence model. Other numerical studies on EVFs often use turbulence models ( $k{-}\epsilon$ in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999) for example) and early work is often restricted to axisymmetric simulations. One interesting result established in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) is that the intensity of the swirling EVF in a cylindrical cell can obey the following scaling law:
$k{-}\epsilon$ in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999) for example) and early work is often restricted to axisymmetric simulations. One interesting result established in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) is that the intensity of the swirling EVF in a cylindrical cell can obey the following scaling law:
 \begin{equation} U \sim \left(\dfrac{J B}{\rho} \right)^{2/3} \dfrac{R}{\nu^{1/3}}. \end{equation}
\begin{equation} U \sim \left(\dfrac{J B}{\rho} \right)^{2/3} \dfrac{R}{\nu^{1/3}}. \end{equation}
Here  $J$ is the typical current density in the bulk of the liquid metal,
$J$ is the typical current density in the bulk of the liquid metal,  $B$ is the imposed axial magnetic field,
$B$ is the imposed axial magnetic field,  $\rho$ and
$\rho$ and  $\nu$ are the metal's density and kinematic viscosity, respectively, and
$\nu$ are the metal's density and kinematic viscosity, respectively, and  $R$ is the radius of the cylindrical cell. This result is obtained in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) by invoking a three-term balance between the inertia, the viscous and the Lorentz forces in a thin boundary layer near the electrical contact. A slightly different scaling law for the intensity of the swirling EVF was suggested in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999), i.e.
$R$ is the radius of the cylindrical cell. This result is obtained in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) by invoking a three-term balance between the inertia, the viscous and the Lorentz forces in a thin boundary layer near the electrical contact. A slightly different scaling law for the intensity of the swirling EVF was suggested in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999), i.e.
 \begin{equation} U \sim \left(\frac{J B R}{\rho} \right)^{5/9} \left( \frac{R}{\nu} \right )^{1/9} \text{ or } U \sim \left(\frac{J B R}{\rho} \right)^{1/2}. \end{equation}
\begin{equation} U \sim \left(\frac{J B R}{\rho} \right)^{5/9} \left( \frac{R}{\nu} \right )^{1/9} \text{ or } U \sim \left(\frac{J B R}{\rho} \right)^{1/2}. \end{equation}
The above scaling laws are not explicitly written in this way in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999), but can be easily recovered (see Appendix A). Since the  $5/9$ law is clearly observed in the axisymmetric
$5/9$ law is clearly observed in the axisymmetric  $k{-}\epsilon$ model simulations reported in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999), one is led to wonder why a different scaling law is observed in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). Recent work by Kolesnichenko et al. (Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020) also studies swirling EVFs in 3-D simulations and with a
$k{-}\epsilon$ model simulations reported in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999), one is led to wonder why a different scaling law is observed in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). Recent work by Kolesnichenko et al. (Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020) also studies swirling EVFs in 3-D simulations and with a  $k{-}\omega$ turbulence model and finds a scaling law that is somewhere in between the
$k{-}\omega$ turbulence model and finds a scaling law that is somewhere in between the  $2/3$ and
$2/3$ and  $5/9$ laws.
$5/9$ laws.
The above observations have led us to do a systematic and fundamental study on swirling EVFs, outside the context of LMBs. What are the different scaling regimes that can be observed in swirling EVFs and how does this depend on  $JB/\rho$ and
$JB/\rho$ and  $\nu$? What happens when the imposed axial magnetic field is large, when inductive effects are no longer negligible? How are the scaling laws influenced by the axisymmetry assumption? To answer these questions, we have performed numerical simulations of the unsteady swirling EVF at high Reynolds numbers using our numerical solver SFEMaNS.
$\nu$? What happens when the imposed axial magnetic field is large, when inductive effects are no longer negligible? How are the scaling laws influenced by the axisymmetry assumption? To answer these questions, we have performed numerical simulations of the unsteady swirling EVF at high Reynolds numbers using our numerical solver SFEMaNS.
At variance with Millere et al. (Reference Millere, Sharamkin and Shcherbinin1980), Liu et al. (Reference Liu, Stefani, Weber, Weier and Li2020), Kolesnichenko et al. (Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020), Herreman et al. (Reference Herreman, Bénard, Nore, Personnettaz, Cappanera and Guermond2020), Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021), where there is only one ‘thin’ wire bringing the current to the cell (i.e. the current is extracted from the whole upper disk closing the cell or from the whole side), the majority of the simulations reported in the present article are done by bringing and extracting the current through two cylindrical wires whose axes are aligned with that of the cell; one is connected to the bottom of the cell and the other one is connected to the top; see figure 1. This setting has also been studied in Weber et al. (Reference Weber, Galindo, Priede, Stefani and Weier2015). In the presence of an axial magnetic field  $B \boldsymbol {e}_z$, the azimuthal force densities
$B \boldsymbol {e}_z$, the azimuthal force densities  $- j_r B \boldsymbol {e}_\theta$ in the top and bottom halves of the cell have opposite directions and they are also of equal strength. This
$- j_r B \boldsymbol {e}_\theta$ in the top and bottom halves of the cell have opposite directions and they are also of equal strength. This  $R_{\rm \pi}$-symmetric forcing produces a counter-rotating EVF that should have many structural similarities with von Kármán flows, which were the subject of many hydrodynamical and magnetohydrodynamical investigations (see, e.g. Nore et al. Reference Nore, Tuckerman, Daube and Xin2003, Reference Nore, Tartar, Daube and Tuckerman2004; Monchaux et al. Reference Monchaux2007; Berhanu et al. Reference Berhanu2007). We are then led to consider the following two additional questions. Does the considered set-up indeed produce a von Kármán-like flow? Does the symmetry of the forcing affect the scaling laws of the swirling EVF?
$R_{\rm \pi}$-symmetric forcing produces a counter-rotating EVF that should have many structural similarities with von Kármán flows, which were the subject of many hydrodynamical and magnetohydrodynamical investigations (see, e.g. Nore et al. Reference Nore, Tuckerman, Daube and Xin2003, Reference Nore, Tartar, Daube and Tuckerman2004; Monchaux et al. Reference Monchaux2007; Berhanu et al. Reference Berhanu2007). We are then led to consider the following two additional questions. Does the considered set-up indeed produce a von Kármán-like flow? Does the symmetry of the forcing affect the scaling laws of the swirling EVF?

Figure 1. Sketch of the investigated set-up and flow. (a) A pair of solid copper wires injects and extracts an electrical current in a cylinder filled with liquid GaInSn eutectic metal. The current density lines spread out as shown by the blue lines. The set-up is immersed in a vertical magnetic field  $B$. The Lorentz force
$B$. The Lorentz force  $\boldsymbol {j} \times B \boldsymbol {e}_z$ is predominantly azimuthal, localized near the rim of the electrical contact and
$\boldsymbol {j} \times B \boldsymbol {e}_z$ is predominantly azimuthal, localized near the rim of the electrical contact and  $R_{\rm \pi}$ symmetric. (b) The EVF that is thus produced is structurally similar to a von Kármán flow. The fluid rotates in opposite directions in the top and bottom halves of the cell and is pumped towards the wires along the axis.
$R_{\rm \pi}$ symmetric. (b) The EVF that is thus produced is structurally similar to a von Kármán flow. The fluid rotates in opposite directions in the top and bottom halves of the cell and is pumped towards the wires along the axis.
The objective of the paper is to answer the above questions using numerical simulations. We start by defining the model in § 2. In § 3 we study the influence of the control parameters  $J, B, \nu$ on the intensity of the EVF in a cell with fixed geometry. We show that the flow is indeed von Kármán-like and describe and explain the various scaling regimes. In § 4 we study geometrical influences on EVFs. We vary the radius of the wires and propose a simple model to describe the variation intensity of the swirling EVF with this radius. We also vary the height of the cell and study the impact of asymmetrical current injection/extraction. We conclude the paper and summarize our findings in § 5.
$J, B, \nu$ on the intensity of the EVF in a cell with fixed geometry. We show that the flow is indeed von Kármán-like and describe and explain the various scaling regimes. In § 4 we study geometrical influences on EVFs. We vary the radius of the wires and propose a simple model to describe the variation intensity of the swirling EVF with this radius. We also vary the height of the cell and study the impact of asymmetrical current injection/extraction. We conclude the paper and summarize our findings in § 5.
2. Model and discretization
The configuration investigated in the paper is described in figure 1. A cylinder of radius  $R$ and height
$R$ and height  $H$ is filled with liquid GaInSn eutectic alloy. Two identical cylindrical copper wires of radius
$H$ is filled with liquid GaInSn eutectic alloy. Two identical cylindrical copper wires of radius  $R_w$ and height
$R_w$ and height  $H_w$ are electrically connected to the fluid, one is attached at the top of the cell and the other one is attached at the bottom of the cell. The axes of the two wires are aligned with the vertical axis of the cell. An external vertical magnetic field
$H_w$ are electrically connected to the fluid, one is attached at the top of the cell and the other one is attached at the bottom of the cell. The axes of the two wires are aligned with the vertical axis of the cell. An external vertical magnetic field  $B \boldsymbol {e}_z$ is applied and an electrical current of intensity
$B \boldsymbol {e}_z$ is applied and an electrical current of intensity  $I$ is driven through the cell. Let
$I$ is driven through the cell. Let  $J = I / {\rm \pi}R^{2}$ be the reference current density; this would be the current density if the current were homogenous inside the cylinder. We systematically use the cylindrical coordinates
$J = I / {\rm \pi}R^{2}$ be the reference current density; this would be the current density if the current were homogenous inside the cylinder. We systematically use the cylindrical coordinates  $(r, \theta, z)$ with the convention that the equatorial plane of the cell is defined by
$(r, \theta, z)$ with the convention that the equatorial plane of the cell is defined by  $z=0$.
$z=0$.
We model the evolution of the velocity and the electromagnetic fields in the liquid GaInSn alloy by the incompressible magneto-hydrodynamics equations,
 $$\begin{gather} \rho (\partial_{t} \boldsymbol{u} + (\boldsymbol{u}\ \boldsymbol{\cdot}\ {\boldsymbol{\nabla}} ) \boldsymbol{u} ) ={-} \boldsymbol{\nabla} p + \rho \nu {\rm \Delta} \boldsymbol{u} + \boldsymbol{j} \times \boldsymbol{b}, \end{gather}$$
$$\begin{gather} \rho (\partial_{t} \boldsymbol{u} + (\boldsymbol{u}\ \boldsymbol{\cdot}\ {\boldsymbol{\nabla}} ) \boldsymbol{u} ) ={-} \boldsymbol{\nabla} p + \rho \nu {\rm \Delta} \boldsymbol{u} + \boldsymbol{j} \times \boldsymbol{b}, \end{gather}$$ $$\begin{gather}\partial_{t} \boldsymbol{b} = \boldsymbol{\nabla} \times (\boldsymbol{u} \times \boldsymbol{b}) + (\mu_0 \sigma)^{{-}1} {\rm \Delta} \boldsymbol{b} , \end{gather}$$
$$\begin{gather}\partial_{t} \boldsymbol{b} = \boldsymbol{\nabla} \times (\boldsymbol{u} \times \boldsymbol{b}) + (\mu_0 \sigma)^{{-}1} {\rm \Delta} \boldsymbol{b} , \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}\ \boldsymbol{\cdot}\ \boldsymbol{u} = 0, \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}\ \boldsymbol{\cdot}\ \boldsymbol{u} = 0, \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}\ \boldsymbol{\cdot}\ \boldsymbol{b} = 0. \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}\ \boldsymbol{\cdot}\ \boldsymbol{b} = 0. \end{gather}$$
Here  $\boldsymbol {u}$ is the velocity of the fluid,
$\boldsymbol {u}$ is the velocity of the fluid,  $p$ is the pressure,
$p$ is the pressure,  $\boldsymbol {j}=\mu _0^{-1}\boldsymbol {\nabla }{\times }\boldsymbol {b}$ is the current density and
$\boldsymbol {j}=\mu _0^{-1}\boldsymbol {\nabla }{\times }\boldsymbol {b}$ is the current density and  $\boldsymbol {b}$ is the magnetic field. The symbol
$\boldsymbol {b}$ is the magnetic field. The symbol  $\mu _0$ denotes the magnetic permeability of vacuum. The density
$\mu _0$ denotes the magnetic permeability of vacuum. The density  $\rho$, the kinematic viscosity
$\rho$, the kinematic viscosity  $\nu$ and the electrical conductivity
$\nu$ and the electrical conductivity  $\sigma$ of the GaInSn eutectic alloy at
$\sigma$ of the GaInSn eutectic alloy at  $T=303$ K are taken from Plevachuk et al. (Reference Plevachuk, Sklyarchuk, Eckert, Gerbeth and Novakovic2014),
$T=303$ K are taken from Plevachuk et al. (Reference Plevachuk, Sklyarchuk, Eckert, Gerbeth and Novakovic2014),
 \begin{equation} \rho = 6345\ \text{kg\ m}^{{-}3}, \quad \nu = 3.2 \times 10^{{-}7} \ {\rm m}^{2}\ {\rm s}^{{-}1}, \quad \sigma = 3.24 \times 10^{6}\ {\rm S}\ {\rm m}^{{-}1}. \end{equation}
\begin{equation} \rho = 6345\ \text{kg\ m}^{{-}3}, \quad \nu = 3.2 \times 10^{{-}7} \ {\rm m}^{2}\ {\rm s}^{{-}1}, \quad \sigma = 3.24 \times 10^{6}\ {\rm S}\ {\rm m}^{{-}1}. \end{equation}
The magnetic field in the solid copper wires,  $\boldsymbol {b}_w$, satisfies the induction equation
$\boldsymbol {b}_w$, satisfies the induction equation
 $$\begin{gather} \partial_{t} \boldsymbol{b}_w = (\mu_0 \sigma_w )^{{-}1} {\rm \Delta} \boldsymbol{b}_w, \end{gather}$$
$$\begin{gather} \partial_{t} \boldsymbol{b}_w = (\mu_0 \sigma_w )^{{-}1} {\rm \Delta} \boldsymbol{b}_w, \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}\ \boldsymbol{\cdot}\ \boldsymbol{b}_w = 0 , \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}\ \boldsymbol{\cdot}\ \boldsymbol{b}_w = 0 , \end{gather}$$
where  $\sigma _w = 5.96\times 10^{7} \ {\rm S}\ {\rm m}^{-1}$ is the electrical conductivity of the copper wires.
$\sigma _w = 5.96\times 10^{7} \ {\rm S}\ {\rm m}^{-1}$ is the electrical conductivity of the copper wires.
The fluid is supposed to be initially at rest. We impose the no-slip boundary condition on the velocity on the entire surface of the cylinder. We also use the following boundary conditions and transmission conditions for the magnetic field:
 \begin{align} \left.\begin{array}{c} b_z |_{r=R} = B , \quad b_\theta |_{r=R} = \mu_0 J R/2, \\ b_r |_{z={\pm} H/2} = 0 , \quad b_\theta |_{z={\pm} H/2} = \mu_0 J R^{2}/2r,\quad \forall \, r \in [R_w,R],\\ \boldsymbol{e}_z \times ( \boldsymbol{b} - \boldsymbol{b}_w ) |_{z={\pm} H/2} = 0 , \quad \boldsymbol{e}_z \times( (\boldsymbol{j}/\sigma) - (\boldsymbol{j}_w / \sigma_w )) |_{z={\pm} H/2} = 0 ,\quad \forall \, r \in [0, R_w], \\ b_{w,z} |_{r=R_w} = B , \quad b_{w,\theta} |_{r=R_w} = \mu_0 J R^{2}/2R_w, \\ b_{w,r} |_{z={\pm}(H/2+H_w)} = 0 , \quad b_{w,\theta} |_{z={\pm} (H/2+H_w)} = \mu_0 J R^{2} r/2R_w^{2}. \end{array}\right\} \end{align}
\begin{align} \left.\begin{array}{c} b_z |_{r=R} = B , \quad b_\theta |_{r=R} = \mu_0 J R/2, \\ b_r |_{z={\pm} H/2} = 0 , \quad b_\theta |_{z={\pm} H/2} = \mu_0 J R^{2}/2r,\quad \forall \, r \in [R_w,R],\\ \boldsymbol{e}_z \times ( \boldsymbol{b} - \boldsymbol{b}_w ) |_{z={\pm} H/2} = 0 , \quad \boldsymbol{e}_z \times( (\boldsymbol{j}/\sigma) - (\boldsymbol{j}_w / \sigma_w )) |_{z={\pm} H/2} = 0 ,\quad \forall \, r \in [0, R_w], \\ b_{w,z} |_{r=R_w} = B , \quad b_{w,\theta} |_{r=R_w} = \mu_0 J R^{2}/2R_w, \\ b_{w,r} |_{z={\pm}(H/2+H_w)} = 0 , \quad b_{w,\theta} |_{z={\pm} (H/2+H_w)} = \mu_0 J R^{2} r/2R_w^{2}. \end{array}\right\} \end{align}
Here  $\boldsymbol {j}_w = \mu _0^{-1} \boldsymbol {\nabla } \times \boldsymbol {b}_w$ is the current density in the wire. The above conditions are known to yield a suitable approximation of the EVF in devices surrounded by vacuum as long as the magnetic Reynolds number remains small (Herreman et al. Reference Herreman, Nore, Ziebell Ramos, Cappanera, Guermond and Weber2019, Reference Herreman, Nore, Cappanera and Guermond2021). These simplified conditions avoid having to calculate the external potential magnetic field outside the cylinder.
$\boldsymbol {j}_w = \mu _0^{-1} \boldsymbol {\nabla } \times \boldsymbol {b}_w$ is the current density in the wire. The above conditions are known to yield a suitable approximation of the EVF in devices surrounded by vacuum as long as the magnetic Reynolds number remains small (Herreman et al. Reference Herreman, Nore, Ziebell Ramos, Cappanera, Guermond and Weber2019, Reference Herreman, Nore, Cappanera and Guermond2021). These simplified conditions avoid having to calculate the external potential magnetic field outside the cylinder.
The solution to the problem defined in the previous section is approximated by using the massively parallel code SFEMaNS. This code has been thoroughly validated. The reader is referred to Guermond et al. (Reference Guermond, Laguerre, Léorat and Nore2007), Guermond et al. (Reference Guermond, Laguerre, Léorat and Nore2009), Cappanera et al. (Reference Cappanera, Guermond, Herreman and Nore2018) for the algorithmic details and the verification and validation tests. The code SFEMaNS uses a Fourier decomposition in the azimuthal direction and a finite element representation in the meridional plane. Every field  $A$, scalar- or vector-valued, is decomposed as
$A$, scalar- or vector-valued, is decomposed as
 \begin{equation} A(r,z,\theta,t) = \sum_{m=0}^{M-1}A_m^{c}(r,z,t) \cos(m\theta) + \sum_{m=1}^{M-1}A_m^{s}(r,z,t) \sin(m\theta). \end{equation}
\begin{equation} A(r,z,\theta,t) = \sum_{m=0}^{M-1}A_m^{c}(r,z,t) \cos(m\theta) + \sum_{m=1}^{M-1}A_m^{s}(r,z,t) \sin(m\theta). \end{equation}
Here  $A_m^{c}(r,z,t)$ are
$A_m^{c}(r,z,t)$ are  $A_m^{s}(r,z,t)$ are finite element functions, and
$A_m^{s}(r,z,t)$ are finite element functions, and  $M$ is the number of complex Fourier modes. The outputs delivered by the code are either temporal snapshots or global quantities. Denoting by
$M$ is the number of complex Fourier modes. The outputs delivered by the code are either temporal snapshots or global quantities. Denoting by  $\langle \cdots \rangle _V$ the volume average over the entire cylindrical fluid domain, we are going to use the following global quantities:
$\langle \cdots \rangle _V$ the volume average over the entire cylindrical fluid domain, we are going to use the following global quantities:
 \begin{equation} u = \sqrt{\langle \|\boldsymbol u\|^{2} \rangle_V}, \quad u_{max} = \max_{\boldsymbol{x}\in V} \|\boldsymbol{u}(\boldsymbol{x},t)\|. \end{equation}
\begin{equation} u = \sqrt{\langle \|\boldsymbol u\|^{2} \rangle_V}, \quad u_{max} = \max_{\boldsymbol{x}\in V} \|\boldsymbol{u}(\boldsymbol{x},t)\|. \end{equation}
Here  $\|\boldsymbol u\|^{2} = \int _V (u_r^{2}(\boldsymbol {x},t) + u_\theta ^{2}(\boldsymbol {x},t) + u_z^{2}(\boldsymbol {x},t))\, \mathrm {d}V$, with
$\|\boldsymbol u\|^{2} = \int _V (u_r^{2}(\boldsymbol {x},t) + u_\theta ^{2}(\boldsymbol {x},t) + u_z^{2}(\boldsymbol {x},t))\, \mathrm {d}V$, with  $V$ the volume of the entire cylindrical fluid domain.
$V$ the volume of the entire cylindrical fluid domain.
Letting  $\delta _{kl}$ be the Kronecker symbol, we further define the following quantities for all
$\delta _{kl}$ be the Kronecker symbol, we further define the following quantities for all  $m\in \{0,\ldots, M-1\}$ to measure the modal content of the flow:
$m\in \{0,\ldots, M-1\}$ to measure the modal content of the flow:
 \begin{equation} u_{m} = \sqrt{0.5 \langle (1+ \delta_{m,0} ) \| \boldsymbol{u}_{m}^{c} \|^{2} +(1-\delta_{m,0}) \|\boldsymbol{u}_{m}^{s}\|^{2} \rangle_V}. \end{equation}
\begin{equation} u_{m} = \sqrt{0.5 \langle (1+ \delta_{m,0} ) \| \boldsymbol{u}_{m}^{c} \|^{2} +(1-\delta_{m,0}) \|\boldsymbol{u}_{m}^{s}\|^{2} \rangle_V}. \end{equation}We measure the toroidal and poloidal parts of the axisymmetric component of the flow by using the following indicators:
 \begin{equation} u_{tor} = \sqrt{\langle (u_{0,\theta}^{c})^{2} \rangle _V} , \quad u_{pol} = \sqrt{\langle (u_{0,r}^{c})^{2} + (u_{0,z}^{c})^{2} \rangle_V}. \end{equation}
\begin{equation} u_{tor} = \sqrt{\langle (u_{0,\theta}^{c})^{2} \rangle _V} , \quad u_{pol} = \sqrt{\langle (u_{0,r}^{c})^{2} + (u_{0,z}^{c})^{2} \rangle_V}. \end{equation}
We finally use bars over the above indicators to mean that the indicators have been averaged over time; for instance,  $\bar {u}$ and
$\bar {u}$ and  $\bar {u}_{max}$ are the time averages of
$\bar {u}_{max}$ are the time averages of  $u$ and
$u$ and  $u_{max}$. The time-averaging operation allows us to define the following non-dimensional quantities:
$u_{max}$. The time-averaging operation allows us to define the following non-dimensional quantities:
 \begin{equation} \overline{Re}= \frac{ \bar{u} R }{\nu}, \quad \bar{\varPi} = \frac{ \sigma \bar{u} B }{J}. \end{equation}
\begin{equation} \overline{Re}= \frac{ \bar{u} R }{\nu}, \quad \bar{\varPi} = \frac{ \sigma \bar{u} B }{J}. \end{equation}
The parameter  $\overline {Re}$ is a Reynolds number, and
$\overline {Re}$ is a Reynolds number, and  $\bar {\varPi }$ measures the ratio of the inductive currents over the imposed current. The inverse of
$\bar {\varPi }$ measures the ratio of the inductive currents over the imposed current. The inverse of  $\varPi$ is also named the load factor (Sutton & Sherman Reference Sutton and Sherman1965; Geindreau & Auriault Reference Geindreau and Auriault2002).
$\varPi$ is also named the load factor (Sutton & Sherman Reference Sutton and Sherman1965; Geindreau & Auriault Reference Geindreau and Auriault2002).
3. Influence of  $J$, $B$ and $\nu$ on swirling EVFs
$J$, $B$ and $\nu$ on swirling EVFs



In this section we report the results of a series of simulations in the set-up with the following fixed geometry  $(R,H,R_w,H_w)=(10,18,2,4) \ \textrm {cm}$. The aspect ratio
$(R,H,R_w,H_w)=(10,18,2,4) \ \textrm {cm}$. The aspect ratio  $H/R=1.8$ is chosen to be identical to that used in the von Kármán sodium experiment (Monchaux et al. Reference Monchaux2007; Berhanu et al. Reference Berhanu2007). We vary
$H/R=1.8$ is chosen to be identical to that used in the von Kármán sodium experiment (Monchaux et al. Reference Monchaux2007; Berhanu et al. Reference Berhanu2007). We vary  $J$,
$J$,  $B$ and
$B$ and  $\nu$ and compare axisymmetric and 3-D simulations.
$\nu$ and compare axisymmetric and 3-D simulations.
3.1. Variable $J$, axisymmetric study

We first set the value of imposed magnetic field to be  $B = 1\ \textrm {mT}$ and we use the following value for the kinematic viscosity
$B = 1\ \textrm {mT}$ and we use the following value for the kinematic viscosity  $\nu = 3.2 \times 10^{-7} \ \textrm {m}^{2}\ \textrm {s}^{-1}$. We vary the imposed electrical current
$\nu = 3.2 \times 10^{-7} \ \textrm {m}^{2}\ \textrm {s}^{-1}$. We vary the imposed electrical current  $J$ as detailed in the leftmost column in table 1. We also provide in this table the main numerical parameters used for each numerical simulation: the time step
$J$ as detailed in the leftmost column in table 1. We also provide in this table the main numerical parameters used for each numerical simulation: the time step  ${\rm \Delta} t$, the meridional mesh size
${\rm \Delta} t$, the meridional mesh size  ${\rm \Delta} l$ and the measured values of
${\rm \Delta} l$ and the measured values of  $\overline {Re}$ and
$\overline {Re}$ and  $\bar {\varPi }$. The meshes used are non-uniform, the two values of
$\bar {\varPi }$. The meshes used are non-uniform, the two values of  ${\rm \Delta} l$ indicate the smallest and largest mesh sizes. All the simulations reported in this section are done by taking
${\rm \Delta} l$ indicate the smallest and largest mesh sizes. All the simulations reported in this section are done by taking  $M=1$ in the azimuthal Fourier approximation; i.e. the flow is forced to be axisymmetric.
$M=1$ in the azimuthal Fourier approximation; i.e. the flow is forced to be axisymmetric.
Table 1. Numerical parameters for the simulations with variable  $J$. Mesh size
$J$. Mesh size  ${\rm \Delta} l$ (non-uniform meshes, smallest
${\rm \Delta} l$ (non-uniform meshes, smallest  $\longrightarrow$ largest mesh size), time step
$\longrightarrow$ largest mesh size), time step  ${\rm \Delta} t$, non-dimensional numbers
${\rm \Delta} t$, non-dimensional numbers  $\overline {Re} = \bar {u} R / \nu$ and
$\overline {Re} = \bar {u} R / \nu$ and  $\bar {\varPi } = \sigma \bar {u} B / J$. (a) Axisymmetric simulations, (b) 3-D simulations with
$\bar {\varPi } = \sigma \bar {u} B / J$. (a) Axisymmetric simulations, (b) 3-D simulations with  $M=20$ or
$M=20$ or  $M=40$.
$M=40$.

We show in figure 2(a) the time evolution of the volume-averaged velocity,  $u$, in log scale for the ordinate axis, for different values of
$u$, in log scale for the ordinate axis, for different values of  $J$. We observe that the flow reaches a steady state for
$J$. We observe that the flow reaches a steady state for  $J = 5,\ 10 \ \textrm {A} \ \textrm {m}^{-2}$. For
$J = 5,\ 10 \ \textrm {A} \ \textrm {m}^{-2}$. For  $J = 50,\ 100\ \textrm {A}\ \textrm {m}^{-2}$, the flow seems to converge to a state that is almost steady (the oscillations around this state are small), but a transition occurs at later times, and the second state that is then reached is characterized by large fluctuations (e.g. at
$J = 50,\ 100\ \textrm {A}\ \textrm {m}^{-2}$, the flow seems to converge to a state that is almost steady (the oscillations around this state are small), but a transition occurs at later times, and the second state that is then reached is characterized by large fluctuations (e.g. at  $t\approx 7200\ \textrm {s}$ for
$t\approx 7200\ \textrm {s}$ for  $J = 50\ \textrm {A} \ \textrm {m}^{-2}$). For the largest values of the current,
$J = 50\ \textrm {A} \ \textrm {m}^{-2}$). For the largest values of the current,  $J = 500,\ 2000\ \textrm {A} \ \textrm {m}^{-2}$, the flow starts oscillating after a very short transient. The time- and space-averaged velocity,
$J = 500,\ 2000\ \textrm {A} \ \textrm {m}^{-2}$, the flow starts oscillating after a very short transient. The time- and space-averaged velocity,  $\bar {u}$, increases monotonously with
$\bar {u}$, increases monotonously with  $J$, as can be seen in figure 2(b). For low
$J$, as can be seen in figure 2(b). For low  $J$, we clearly observe a power law
$J$, we clearly observe a power law  $\bar {u} \sim J^{1}$. For intermediate
$\bar {u} \sim J^{1}$. For intermediate  $J$, the scaling
$J$, the scaling  $\bar {u} \sim J^{2/3}$ is perhaps visible over a short interval. At high
$\bar {u} \sim J^{2/3}$ is perhaps visible over a short interval. At high  $J$, we can observe a power law
$J$, we can observe a power law  $\bar {u} \sim J^{1/2}$ or
$\bar {u} \sim J^{1/2}$ or  $J^{5/9}$. In figure 2(c) we show the ratio
$J^{5/9}$. In figure 2(c) we show the ratio  $\bar {u}_{pol}/\bar {u}_{tor}$ as a function of
$\bar {u}_{pol}/\bar {u}_{tor}$ as a function of  $J$. This ratio is small for
$J$. This ratio is small for  $J = 0.01\ \textrm {A} \ \textrm {m}^{-2}$. It then increases as
$J = 0.01\ \textrm {A} \ \textrm {m}^{-2}$. It then increases as  $J$ grows until reaching a maximum almost equal to 0.5 at
$J$ grows until reaching a maximum almost equal to 0.5 at  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$. For higher values of
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$. For higher values of  $J$, it first decreases and eventually fluctuates around a plateau. We also observe that the magnitude of the toroidal component of the velocity always dominates that of the poloidal component.
$J$, it first decreases and eventually fluctuates around a plateau. We also observe that the magnitude of the toroidal component of the velocity always dominates that of the poloidal component.

Figure 2. Variable  $J,$ axisymmetric simulations. (a) Time evolution of the volume-averaged velocity
$J,$ axisymmetric simulations. (a) Time evolution of the volume-averaged velocity  $u$ for different values of
$u$ for different values of  $J$. (b) Time- and space-averaged velocity
$J$. (b) Time- and space-averaged velocity  $\bar {u}$ as a function of
$\bar {u}$ as a function of  $J$ (time average done after the transient). (c) Ratio
$J$ (time average done after the transient). (c) Ratio  $\bar {u}_{pol}/\bar {u}_{tor}$ as a function of
$\bar {u}_{pol}/\bar {u}_{tor}$ as a function of  $J$.
$J$.
In figure 3 we show the spatial structure of the axisymmetric EVF at various values of the current. We show in figures 3(a) and 3(b) 3-D streamlines of the velocity field coloured by the magnitude of the velocity. The geometric organisation of the flow is similar to that of the von Kármán flows found in (Nore et al. Reference Nore, Tuckerman, Daube and Xin2003): the fluid is pumped along the axis from the equatorial plane towards the top and bottom caps; it is then expelled outwards along the two cylindrical caps and returns back to the equatorial plane along the side wall of the cell in a spiral fashion; the spiral motion of the fluid in the upper half of the cell is opposite to that of the fluid in the lower half. For  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$, the velocity field is stationary and
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$, the velocity field is stationary and  $R_{\rm \pi}$ symmetric, meaning that
$R_{\rm \pi}$ symmetric, meaning that
 \begin{equation} \left( \begin{array}{@{}c@{}} u_r \\ u_\theta \\ u_z \end{array} \right) (r,\theta,z) = \left( \begin{array}{@{}c@{}} u_r \\ -u_\theta \\ -u_z \end{array} \right) (r,-\theta,-z). \end{equation}
\begin{equation} \left( \begin{array}{@{}c@{}} u_r \\ u_\theta \\ u_z \end{array} \right) (r,\theta,z) = \left( \begin{array}{@{}c@{}} u_r \\ -u_\theta \\ -u_z \end{array} \right) (r,-\theta,-z). \end{equation}
For  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$, the invariance under the
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$, the invariance under the  $R_{\rm \pi}$ symmetry is broken and the streamlines of the velocity form a chaotic web. We show in figure 3(c) the magnitude of the velocity
$R_{\rm \pi}$ symmetry is broken and the streamlines of the velocity form a chaotic web. We show in figure 3(c) the magnitude of the velocity  $\|\boldsymbol {u}\|$ in meridional planes for various values of the current
$\|\boldsymbol {u}\|$ in meridional planes for various values of the current  $J$. For the smallest value of the current,
$J$. For the smallest value of the current,  $J = 0.1\ \textrm {A}\ \textrm {m}^{-2}$, the flow is steady and is the most intense near the rim of the electrical contact with the wires. Up until
$J = 0.1\ \textrm {A}\ \textrm {m}^{-2}$, the flow is steady and is the most intense near the rim of the electrical contact with the wires. Up until  $J= 10 \ \textrm {A} \ \textrm {m}^{-2}$, the intensity of the flow gradually increases close to the vertical axis while still being invariant under the
$J= 10 \ \textrm {A} \ \textrm {m}^{-2}$, the intensity of the flow gradually increases close to the vertical axis while still being invariant under the  $R_{\rm \pi}$ symmetry. At
$R_{\rm \pi}$ symmetry. At  $J = 50\ \textrm {A} \ \textrm {m}^{-2}$ and above this value the system becomes time dependent: the
$J = 50\ \textrm {A} \ \textrm {m}^{-2}$ and above this value the system becomes time dependent: the  $R_{\rm \pi}$ symmetry is broken. The flow eventually becomes chaotic for large values of
$R_{\rm \pi}$ symmetry is broken. The flow eventually becomes chaotic for large values of  $J$. The intensity of the flow is notably small near the axis and in two regions close to the two contacts with the connecting wires.
$J$. The intensity of the flow is notably small near the axis and in two regions close to the two contacts with the connecting wires.

Figure 3. Variable  $J$, axisymmetric simulations. Spatial structure of the flow. (a,b) Streamlines coloured by the velocity magnitude in axisymmetric simulations for different values of
$J$, axisymmetric simulations. Spatial structure of the flow. (a,b) Streamlines coloured by the velocity magnitude in axisymmetric simulations for different values of  $J$. (c) Transition of the axisymmetric flow as
$J$. (c) Transition of the axisymmetric flow as  $J$ increases, visualized by the velocity magnitude
$J$ increases, visualized by the velocity magnitude  $\|\boldsymbol {u}\|$ in the meridian plane.
$\|\boldsymbol {u}\|$ in the meridian plane.
The large change in the spatial structure of the flow between  $J= 10 \ \textrm {A} \ \textrm {m}^{-2}$ and
$J= 10 \ \textrm {A} \ \textrm {m}^{-2}$ and  $J= 50 \ \textrm {A} \ \textrm {m}^{-2}$ indicates that a symmetry-breaking bifurcation occurs for a critical value
$J= 50 \ \textrm {A} \ \textrm {m}^{-2}$ indicates that a symmetry-breaking bifurcation occurs for a critical value  $J_c$ in the interval
$J_c$ in the interval  $[10,50] \ \textrm {A} \ \textrm {m}^{-2}$. Figure 4(a) shows two snapshots of the magnitude of the velocity,
$[10,50] \ \textrm {A} \ \textrm {m}^{-2}$. Figure 4(a) shows two snapshots of the magnitude of the velocity,  $\| \boldsymbol {u} \|$, for
$\| \boldsymbol {u} \|$, for  $J = 50 \ \textrm {A}\ \textrm {m}^{-2}$. The flow is (quasi)-symmetric, (quasi)-steady and intense close to the axis at
$J = 50 \ \textrm {A}\ \textrm {m}^{-2}$. The flow is (quasi)-symmetric, (quasi)-steady and intense close to the axis at  $t=4000\ \textrm {s}$, but steadiness is lost and the symmetry is broken at
$t=4000\ \textrm {s}$, but steadiness is lost and the symmetry is broken at  $t=30\ 000\ \textrm {s}$. Note also that at this time the magnitude of the velocity is small in a small cylinder close to the axis. To measure the critical current density
$t=30\ 000\ \textrm {s}$. Note also that at this time the magnitude of the velocity is small in a small cylinder close to the axis. To measure the critical current density  $J_c^{axi}$ of the bifurcation, we calculate the volume average of the kinetic energy in the top half and in the bottom half of the cell. The volume average computed over the upper half is denoted
$J_c^{axi}$ of the bifurcation, we calculate the volume average of the kinetic energy in the top half and in the bottom half of the cell. The volume average computed over the upper half is denoted  $E_{top}$ and the volume average computed over the lower half is denoted
$E_{top}$ and the volume average computed over the lower half is denoted  $E_{bot}$. If, starting from
$E_{bot}$. If, starting from  $0$, the difference
$0$, the difference  $|E_{top} - E_{bot}|$ grows in time, we conclude that there is a loss of symmetry. We use this quantity to measure the growth rate of the instability. This concept is illustrated in the inset of figure 4(b) where we show how
$|E_{top} - E_{bot}|$ grows in time, we conclude that there is a loss of symmetry. We use this quantity to measure the growth rate of the instability. This concept is illustrated in the inset of figure 4(b) where we show how  $|E_{top} - E_{bot}|$ increases exponentially with time before reaching a plateau. Using a semi-logarithmic scale, we measure the growth rate
$|E_{top} - E_{bot}|$ increases exponentially with time before reaching a plateau. Using a semi-logarithmic scale, we measure the growth rate  $\lambda$ as the slope of the straight line fitting the growth of
$\lambda$ as the slope of the straight line fitting the growth of  $|E_{top} - E_{bot}|$ in the transient regime. The growth rates computed with seven values of
$|E_{top} - E_{bot}|$ in the transient regime. The growth rates computed with seven values of  $J$ are shown in figure 4(b). Using linear extrapolation, we estimate that the instability threshold is
$J$ are shown in figure 4(b). Using linear extrapolation, we estimate that the instability threshold is  $J_c^{axi}\approx 17\ \textrm {A\ m}^{-2}$.
$J_c^{axi}\approx 17\ \textrm {A\ m}^{-2}$.

Figure 4. Variable  $J$, axisymmetric simulations. First bifurcation of the flow. (a) The
$J$, axisymmetric simulations. First bifurcation of the flow. (a) The  $\| \boldsymbol {u} \|$ structure before and after the first bifurcation for
$\| \boldsymbol {u} \|$ structure before and after the first bifurcation for  $J= 50\ \textrm {A} \ \textrm {m}^{-2}$. (b) Growth rate
$J= 50\ \textrm {A} \ \textrm {m}^{-2}$. (b) Growth rate  $\lambda$ of the first axisymmetric instability as a function of
$\lambda$ of the first axisymmetric instability as a function of  $J$ and extrapolated threshold
$J$ and extrapolated threshold  $J_c^{axi} =17\ \textrm {A\ m}^{-2}$. We measure the growth rate
$J_c^{axi} =17\ \textrm {A\ m}^{-2}$. We measure the growth rate  $\lambda$ from the time series for
$\lambda$ from the time series for  $|E_{top}-E_{bot}|$, the difference in kinetic energy between the top and bottom half of the fluid domain.
$|E_{top}-E_{bot}|$, the difference in kinetic energy between the top and bottom half of the fluid domain.
3.2. Variable $J$, 3-D study

We now present the results of 3-D simulations done with  $M = 20$ or
$M = 20$ or  $M = 40$ Fourier modes. We focus on
$M = 40$ Fourier modes. We focus on  $M = 20$ and then justify why we use 20 modes by comparing cases with 20 and 40 modes.
$M = 20$ and then justify why we use 20 modes by comparing cases with 20 and 40 modes.
In figure 5 we show the time evolution of the volume-averaged velocity  $u$ and its Fourier components
$u$ and its Fourier components  $u_0$,
$u_0$,  $u_1$,
$u_1$,  $u_2$,
$u_2$,  $u_3$. For
$u_3$. For  $J=1\ \textrm {A} \ \textrm {m}^{-2}$, the system remains axisymmetric. At
$J=1\ \textrm {A} \ \textrm {m}^{-2}$, the system remains axisymmetric. At  $J=5\ \textrm {A} \ \textrm {m}^{-2}$ a first symmetry-breaking bifurcation has occurred: the flow becomes three dimensional. The Fourier mode
$J=5\ \textrm {A} \ \textrm {m}^{-2}$ a first symmetry-breaking bifurcation has occurred: the flow becomes three dimensional. The Fourier mode  $m=2$ grows exponentially, saturates at
$m=2$ grows exponentially, saturates at  $t= 20\ 000\ \textrm {s}$ and reaches a steady state at
$t= 20\ 000\ \textrm {s}$ and reaches a steady state at  $t = 30000\ \textrm {s}$. For
$t = 30000\ \textrm {s}$. For  $J=10\ \textrm {A} \ \textrm {m}^{-2}$, a Hopf-like bifurcation has occurred: the mode
$J=10\ \textrm {A} \ \textrm {m}^{-2}$, a Hopf-like bifurcation has occurred: the mode  $m=2$ remains dominant but the flow periodically oscillates. For
$m=2$ remains dominant but the flow periodically oscillates. For  $J=50\ \textrm {A} \ \textrm {m}^{-2}$, the transition to 3-D turbulence has occurred. Although the flow exhibits large 3-D fluctuations, the axisymmetric Fourier component
$J=50\ \textrm {A} \ \textrm {m}^{-2}$, the transition to 3-D turbulence has occurred. Although the flow exhibits large 3-D fluctuations, the axisymmetric Fourier component  $u_0$ remains dominant.
$u_0$ remains dominant.

Figure 5. Variable  $J$, 3-D simulations,
$J$, 3-D simulations,  $M = 20$. Time series of
$M = 20$. Time series of  $u$ and modal content
$u$ and modal content  $u_0,u_1,u_2,u_3$ for different current densities
$u_0,u_1,u_2,u_3$ for different current densities  $J$ as marked in the figures.
$J$ as marked in the figures.
In figure 6(a) we show the time- and volume-averaged velocity  $\bar {u}_{\textrm {3D}}$ of these 3-D simulations. For comparison, we also show in this graph the time- and volume-averaged velocity obtained in axisymmetric simulations; we use the symbol
$\bar {u}_{\textrm {3D}}$ of these 3-D simulations. For comparison, we also show in this graph the time- and volume-averaged velocity obtained in axisymmetric simulations; we use the symbol  $\bar {u}_{{axi}}$ to differentiate it from the 3-D velocity. Inspection of the graph reveals that three dimensionalization appears between
$\bar {u}_{{axi}}$ to differentiate it from the 3-D velocity. Inspection of the graph reveals that three dimensionalization appears between  $J = 1$ and
$J = 1$ and  $5\ \textrm {A} \ \textrm {m}^{-2}$. For high current densities, we observe
$5\ \textrm {A} \ \textrm {m}^{-2}$. For high current densities, we observe  $\bar {u} \sim J^{1/2}$ or
$\bar {u} \sim J^{1/2}$ or  $J^{5/9}$. A fit of the curve on the three last points gives a slope of 0.51 for the axisymmetric simulations, which corresponds to the law
$J^{5/9}$. A fit of the curve on the three last points gives a slope of 0.51 for the axisymmetric simulations, which corresponds to the law  $\bar {u}_{{axi}} \sim J^{1/2}$, and 0.55 for the 3-D ones, which corresponds rather to
$\bar {u}_{{axi}} \sim J^{1/2}$, and 0.55 for the 3-D ones, which corresponds rather to  $\bar {u}_{\textrm {3D}} \sim J^{5/9}$. For medium current densities, the power law
$\bar {u}_{\textrm {3D}} \sim J^{5/9}$. For medium current densities, the power law  $\bar {u} \sim J^{2/3}$ is not incompatible with the data, but we cannot say that this scaling regime is clearly visible.
$\bar {u} \sim J^{2/3}$ is not incompatible with the data, but we cannot say that this scaling regime is clearly visible.

Figure 6. Variable  $J,$ 3-D simulations,
$J,$ 3-D simulations,  $M = 20$. (a) Variation of
$M = 20$. (a) Variation of  $\bar {u}$ with
$\bar {u}$ with  $J$ in axisymmetrical and 3-D simulations. (b) Ratio
$J$ in axisymmetrical and 3-D simulations. (b) Ratio  $\bar {u}_{\textrm {3D}} /\bar {u}_{{axi}}$ as a function of
$\bar {u}_{\textrm {3D}} /\bar {u}_{{axi}}$ as a function of  $J$.
$J$.
We also note that the value of  $\bar {u}_{\textrm {3D}}$ is just slightly below
$\bar {u}_{\textrm {3D}}$ is just slightly below  $\bar {u}_{{axi}}$, obtained assuming axisymmetry. This is also visible in figure 6(b) where we plot the ratio
$\bar {u}_{{axi}}$, obtained assuming axisymmetry. This is also visible in figure 6(b) where we plot the ratio  $\bar {u}_{\textrm {3D}}/\bar {u}_{{axi}}$ as a function of
$\bar {u}_{\textrm {3D}}/\bar {u}_{{axi}}$ as a function of  $J$. The flow is axisymmetric for very small values of the current (i.e.
$J$. The flow is axisymmetric for very small values of the current (i.e.  $\bar {u}_{3D} =\bar {u}_{{axi}}$). The ratio
$\bar {u}_{3D} =\bar {u}_{{axi}}$). The ratio  $\bar {u}_{\textrm {3D}}/\bar {u}_{{axi}}$ decreases as
$\bar {u}_{\textrm {3D}}/\bar {u}_{{axi}}$ decreases as  $J$ grows up to the value
$J$ grows up to the value  $J = 50\ \textrm {A} \ \textrm {m}^{-2}$, after which the ratio fluctuates around 0.8.
$J = 50\ \textrm {A} \ \textrm {m}^{-2}$, after which the ratio fluctuates around 0.8.
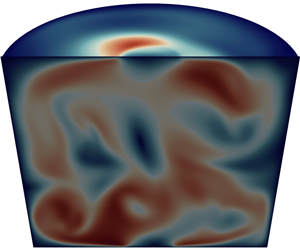
We show snapshots of the spatial organisation of the flow in figure 7 for the following three values of the current  $J = 5,50,500\ \textrm {A} \ \textrm {m}^{-2}$. The flow is clearly three dimensional. This figure shows the value of
$J = 5,50,500\ \textrm {A} \ \textrm {m}^{-2}$. The flow is clearly three dimensional. This figure shows the value of  $\| \boldsymbol {u} \|$ in a meridian plane and in the horizontal plane located at
$\| \boldsymbol {u} \|$ in a meridian plane and in the horizontal plane located at  $z= 8.8 \ \textrm {cm}$. We observe that, for
$z= 8.8 \ \textrm {cm}$. We observe that, for  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$, the equatorial symmetry by reflection is broken (there is a slight asymmetry between the lower and the upper half of the cell). Recall that the flow is time independent though. The flows for
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$, the equatorial symmetry by reflection is broken (there is a slight asymmetry between the lower and the upper half of the cell). Recall that the flow is time independent though. The flows for  $J = 50\ \textrm {A} \ \textrm {m}^{-2}$ and
$J = 50\ \textrm {A} \ \textrm {m}^{-2}$ and  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$ are clearly turbulent. The large- and small-scale structures seem to be equally distributed throughout the domain. The low-speed region near the axis that is observed in the axisymmetric simulations for large values of
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$ are clearly turbulent. The large- and small-scale structures seem to be equally distributed throughout the domain. The low-speed region near the axis that is observed in the axisymmetric simulations for large values of  $J$ (see figure 3c) is not present in these 3-D simulations.
$J$ (see figure 3c) is not present in these 3-D simulations.

Figure 7. Variable  $J$, 3-D simulations,
$J$, 3-D simulations,  $M = 20$. Spatial structure of the flow:
$M = 20$. Spatial structure of the flow:  $\|\boldsymbol {u}\|$ for
$\|\boldsymbol {u}\|$ for  $J = 5,50,500 \ \textrm {A} \ \textrm {m}^{-2}$. The flow is steady for
$J = 5,50,500 \ \textrm {A} \ \textrm {m}^{-2}$. The flow is steady for  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$ and turbulent for
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$ and turbulent for  $J = 50, 500\ \textrm {A} \ \textrm {m}^{-2}$. Results are shown for (a)
$J = 50, 500\ \textrm {A} \ \textrm {m}^{-2}$. Results are shown for (a)  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$, (b)
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$, (b)  $J = 50\ \textrm {A} \ \textrm {m}^{-2}$ and (c)
$J = 50\ \textrm {A} \ \textrm {m}^{-2}$ and (c)  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$.
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$.
Because of the large fluctuations of the flow for high current densities, we can wonder if 20 modes are enough to properly represent the flow. For this reason, we have done a small convergence study varying the number of Fourier modes  $M=20$ to
$M=20$ to  $M=40$ and for increasing
$M=40$ and for increasing  $J = 100,\ 500$ and
$J = 100,\ 500$ and  $2000\ \textrm {A} \ \textrm {m}^{-2}$. On figure 8 we represent the time- and space-averaged modal kinetic energy
$2000\ \textrm {A} \ \textrm {m}^{-2}$. On figure 8 we represent the time- and space-averaged modal kinetic energy  $E_c$ as a function of
$E_c$ as a function of  $m$ for
$m$ for  $M=20$ and
$M=20$ and  $M=40$. For
$M=40$. For  $J=100\ \textrm {A} \ \textrm {m}^{-2}$, the spectra show small differences above
$J=100\ \textrm {A} \ \textrm {m}^{-2}$, the spectra show small differences above  $m \geq 15$. For
$m \geq 15$. For  $J=500\ \textrm {A}\ \textrm {m}^{-2}$, we find similar differences from
$J=500\ \textrm {A}\ \textrm {m}^{-2}$, we find similar differences from  $m \geq 10$. In both simulations the most energetic modes are well converged and, hence, we can limit resolution to
$m \geq 10$. In both simulations the most energetic modes are well converged and, hence, we can limit resolution to  $M= 20$. For
$M= 20$. For  $J=2000\ \textrm {A} \ \textrm {m}^{-2}$, the spectra present more significant differences. The use of 40 modes is advisable in this case, since the azimuthal small scales are better resolved and certainly if the purpose is to access the fine turbulent structure of the flow. For the averaged velocity
$J=2000\ \textrm {A} \ \textrm {m}^{-2}$, the spectra present more significant differences. The use of 40 modes is advisable in this case, since the azimuthal small scales are better resolved and certainly if the purpose is to access the fine turbulent structure of the flow. For the averaged velocity  $\bar {u}$ however, 20 or 40 modes yield the same result. The plots of figure 6 obtained with
$\bar {u}$ however, 20 or 40 modes yield the same result. The plots of figure 6 obtained with  $M=20$ remain valid up the highest value of
$M=20$ remain valid up the highest value of  $J$.
$J$.

Figure 8. Variable  $J$, 3-D simulations. Spectra of the kinetic energy averaged on time in the statistically steady state as a function of
$J$, 3-D simulations. Spectra of the kinetic energy averaged on time in the statistically steady state as a function of  $m$ for
$m$ for  $J = 100,\ 500,\ 2000 \ \textrm {A} \ \textrm {m}^{-2}$ and
$J = 100,\ 500,\ 2000 \ \textrm {A} \ \textrm {m}^{-2}$ and  $M=20$ and
$M=20$ and  $M=40$. The spectra show that 20 modes are sufficient for
$M=40$. The spectra show that 20 modes are sufficient for  $J=100$ and
$J=100$ and  $J=500\ \textrm {A} \ \textrm {m}^{-2}$, but for
$J=500\ \textrm {A} \ \textrm {m}^{-2}$, but for  $J=2000\ \textrm {A} \ \textrm {m}^{-2}$, 40 modes are necessary to represent properly the first modes. Results are shown for (a)
$J=2000\ \textrm {A} \ \textrm {m}^{-2}$, 40 modes are necessary to represent properly the first modes. Results are shown for (a)  $J = 100\ \textrm {A} \ \textrm {m}^{-2}$, (b)
$J = 100\ \textrm {A} \ \textrm {m}^{-2}$, (b)  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$ and (c)
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$ and (c)  $J = 2000\ \textrm {A} \ \textrm {m}^{-2}$.
$J = 2000\ \textrm {A} \ \textrm {m}^{-2}$.
In figure 9(a) we focus our attention on the steady state and 3-D flow obtained with  $J = 5\ \textrm {A}\ \textrm {m}^{-2}$. Recall that this value of the current is above the critical threshold for which the axisymmetry is broken. We display in this figure several representations of the flow structure. Note that the flow organisation is strikingly similar to that observed in the von Kármán flows described in Nore et al. (Reference Nore, Tuckerman, Daube and Xin2003). We observe that the 3-D flow is also
$J = 5\ \textrm {A}\ \textrm {m}^{-2}$. Recall that this value of the current is above the critical threshold for which the axisymmetry is broken. We display in this figure several representations of the flow structure. Note that the flow organisation is strikingly similar to that observed in the von Kármán flows described in Nore et al. (Reference Nore, Tuckerman, Daube and Xin2003). We observe that the 3-D flow is also  $R_{\rm \pi}$ symmetric (see (3.1)). The predominance of the Fourier mode
$R_{\rm \pi}$ symmetric (see (3.1)). The predominance of the Fourier mode  $m=2$ is the spectral manifestation of the presence of two vortices roughly localized on the equatorial plane, rotating in the same direction, and with axes aligned with the directions
$m=2$ is the spectral manifestation of the presence of two vortices roughly localized on the equatorial plane, rotating in the same direction, and with axes aligned with the directions  $\{\theta = -{\rm \pi} /2, z=0\}$ and
$\{\theta = -{\rm \pi} /2, z=0\}$ and  $\{\theta = {\rm \pi}/2,z=0\}$. The centre of one vortex is visible between the two red/orange oblong structures in the right panel in figure 9(c). The vortices are separated by a transition layer that is oblong, roughly localized on the equatorial plane and slightly twisted. This transition layer is materialised in the centre and the right panels in figure 9(c) by blue regions. The numerical simulations indicate that the 3-D steady state undergoes a second bifurcation in the interval
$\{\theta = {\rm \pi}/2,z=0\}$. The centre of one vortex is visible between the two red/orange oblong structures in the right panel in figure 9(c). The vortices are separated by a transition layer that is oblong, roughly localized on the equatorial plane and slightly twisted. This transition layer is materialised in the centre and the right panels in figure 9(c) by blue regions. The numerical simulations indicate that the 3-D steady state undergoes a second bifurcation in the interval  $J \in [5,10] \ \textrm {A}\ \textrm {m}^{-2}$. Beyond the critical value, the flow starts oscillating periodically, but the overall structure of the flow stays
$J \in [5,10] \ \textrm {A}\ \textrm {m}^{-2}$. Beyond the critical value, the flow starts oscillating periodically, but the overall structure of the flow stays  $R_{\rm \pi}$ symmetric. The reader is invited to watch the video provided in the supplementary movie available at https://doi.org/10.1017/jfm.2022.779 to better appreciate the nature of this periodic flow. The simulation corresponding to the video is done with
$R_{\rm \pi}$ symmetric. The reader is invited to watch the video provided in the supplementary movie available at https://doi.org/10.1017/jfm.2022.779 to better appreciate the nature of this periodic flow. The simulation corresponding to the video is done with  $J = 10 \ \textrm {A} \ \textrm {m}^{-2}$.
$J = 10 \ \textrm {A} \ \textrm {m}^{-2}$.

Figure 9. Variable  $J$, 3-D simulations,
$J$, 3-D simulations,  $M = 20$. Flow after the first bifurcation for
$M = 20$. Flow after the first bifurcation for  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$. (a) Snapshots of
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$. (a) Snapshots of  $u_z$ at
$u_z$ at  $z = -0.03$ m,
$z = -0.03$ m,  $z = 0$ m and
$z = 0$ m and  $z = 0.03$ m. (b) Contour of
$z = 0.03$ m. (b) Contour of  $\|\boldsymbol {u}\|$ taken for
$\|\boldsymbol {u}\|$ taken for  $\|\boldsymbol {u}\|$ =0.6
$\|\boldsymbol {u}\|$ =0.6  $\|\boldsymbol {u}\|_{max}$ coloured by
$\|\boldsymbol {u}\|_{max}$ coloured by  $u_z$. (c) Snapshots of
$u_z$. (c) Snapshots of  $\|\boldsymbol {u}\|$ at
$\|\boldsymbol {u}\|$ at  $r=0.8R$ for
$r=0.8R$ for  $-{\rm \pi} /2 \leq \theta \leq {\rm \pi}/2$ (left) and
$-{\rm \pi} /2 \leq \theta \leq {\rm \pi}/2$ (left) and  $0 \leq \theta \leq {\rm \pi}$ (right). One sees the
$0 \leq \theta \leq {\rm \pi}$ (right). One sees the  $R_{\rm \pi}$ symmetry and the dominance of the
$R_{\rm \pi}$ symmetry and the dominance of the  $m=2$ azimuthal mode: there are two opposite vortices and two opposite aspiration fronts, where the flow is directed towards the centre of the cylinder.
$m=2$ azimuthal mode: there are two opposite vortices and two opposite aspiration fronts, where the flow is directed towards the centre of the cylinder.
A third bifurcation breaking the  $R_{\rm \pi}$ symmetry occurs in the interval
$R_{\rm \pi}$ symmetry occurs in the interval  $J=[10,50] \ \textrm {A} \ \textrm {m}^{-2}$. Increasing the value of the current beyond this point quickly leads to a fully turbulent flow; see figure 7(c).
$J=[10,50] \ \textrm {A} \ \textrm {m}^{-2}$. Increasing the value of the current beyond this point quickly leads to a fully turbulent flow; see figure 7(c).
We determine the threshold of the first bifurcation (which we recall breaks the axisymmetry) by inspecting the time evolution of the modal volume-averaged values  $u_m$ for
$u_m$ for  $m=1,2,3$. Beyond the bifurcation threshold, some of these quantities start to grow exponentially. For instance, the inset of figure 10 shows that the Fourier components
$m=1,2,3$. Beyond the bifurcation threshold, some of these quantities start to grow exponentially. For instance, the inset of figure 10 shows that the Fourier components  $u_1$ and
$u_1$ and  $u_2$ grow exponentially in time. This technique allows us to measure the growth rates
$u_2$ grow exponentially in time. This technique allows us to measure the growth rates  $\lambda$ of the modes
$\lambda$ of the modes  $m=1,2$ for
$m=1,2$ for  $J = 1,5,10\ \textrm {A} \ \textrm {m}^{-2}$. By linear fit we obtain
$J = 1,5,10\ \textrm {A} \ \textrm {m}^{-2}$. By linear fit we obtain  $J_c^{ \rm 3D} \approx 2.5\ \textrm {A} \ \textrm {m}^{-2}$ for both modes
$J_c^{ \rm 3D} \approx 2.5\ \textrm {A} \ \textrm {m}^{-2}$ for both modes  $m=1$ and
$m=1$ and  $m=2$. A similar observation was made for the first bifurcation of the von Kármán flow reported in Nore et al. (Reference Nore, Tartar, Daube and Tuckerman2004), where there is also a bifurcation of codimension two (the aspect ratio is
$m=2$. A similar observation was made for the first bifurcation of the von Kármán flow reported in Nore et al. (Reference Nore, Tartar, Daube and Tuckerman2004), where there is also a bifurcation of codimension two (the aspect ratio is  $H/R\approx 1.64$ therein).
$H/R\approx 1.64$ therein).

Figure 10. Variable  $J$, 3-D simulations,
$J$, 3-D simulations,  $M = 20$. Threshold of the first bifurcation in three dimensions. Beyond a certain current density we observe exponential growth on
$M = 20$. Threshold of the first bifurcation in three dimensions. Beyond a certain current density we observe exponential growth on  $u_1$ and
$u_1$ and  $u_2$, as shown in the inset at
$u_2$, as shown in the inset at  $J=5\ \textrm {A} \ \textrm {m}^{-2}$. The measured growth rates allow us to locate the threshold of the first 3-D bifurcation near
$J=5\ \textrm {A} \ \textrm {m}^{-2}$. The measured growth rates allow us to locate the threshold of the first 3-D bifurcation near  $J_c^{ \rm 3D} \approx 2.5 \textrm {A} \ \textrm {m}^{-2}$ for both modes
$J_c^{ \rm 3D} \approx 2.5 \textrm {A} \ \textrm {m}^{-2}$ for both modes  $m=1,2$.
$m=1,2$.
3.3. Variable $B$, axisymmetric study

We now report the results obtained for a second series of numerical simulations where we investigate the influence of the magnitude of the imposed magnetic field. We use the same geometry of the cell as above, we fix  $J=50 \ \textrm {A} \ \textrm {m}^{-2}$, and we use
$J=50 \ \textrm {A} \ \textrm {m}^{-2}$, and we use  $\nu = 3.2\times 10^{-7} \ \textrm {m}^{2} \ \textrm {s}^{-1}$. Most simulations are done assuming axisymmetry. We have done one 3-D simulation at high field
$\nu = 3.2\times 10^{-7} \ \textrm {m}^{2} \ \textrm {s}^{-1}$. Most simulations are done assuming axisymmetry. We have done one 3-D simulation at high field  $B=10^{-1} \ \textrm {T}$ with
$B=10^{-1} \ \textrm {T}$ with  $M=20$ modes. The other numerical parameters used for the simulations are reported in table 2.
$M=20$ modes. The other numerical parameters used for the simulations are reported in table 2.
Table 2. Numerical parameters for the axisymmetric simulations with variable  $B$. Mesh size
$B$. Mesh size  ${\rm \Delta} l$ (non-uniform meshes, smallest
${\rm \Delta} l$ (non-uniform meshes, smallest  $\longrightarrow$ largest mesh size), time step
$\longrightarrow$ largest mesh size), time step  ${\rm \Delta} t$, non-dimensional numbers
${\rm \Delta} t$, non-dimensional numbers  $\overline {Re} = \bar {u} R / \nu$ and
$\overline {Re} = \bar {u} R / \nu$ and  $\bar {\varPi } = \sigma \bar {u} B / J$.
$\bar {\varPi } = \sigma \bar {u} B / J$.

We show in figure 11 the time- and volume-averaged velocity,  $\bar {u}$, as a function of
$\bar {u}$, as a function of  $B$. We observe that the behaviour of
$B$. We observe that the behaviour of  $\bar {u}$ is not monotone with respect to
$\bar {u}$ is not monotone with respect to  $B$:
$B$:  $\bar {u}$ first increases with
$\bar {u}$ first increases with  $B$ and then sharply decays above a certain magnetic field strength. Power laws
$B$ and then sharply decays above a certain magnetic field strength. Power laws  $\bar {u} \sim B^{2/3}$ followed by
$\bar {u} \sim B^{2/3}$ followed by  $\bar {u} \sim B^{1/2}$ and later
$\bar {u} \sim B^{1/2}$ and later  $\bar {u} \sim B^{-1}$ are observed as
$\bar {u} \sim B^{-1}$ are observed as  $B$ increases.
$B$ increases.

Figure 11. Variable B, axisymmetric simulations. The typical flow magnitude  $\bar {u}$ first increases with the magnetic field
$\bar {u}$ first increases with the magnetic field  $B$, but decreases back again for very intense imposed magnetic fields.
$B$, but decreases back again for very intense imposed magnetic fields.
Figure 12 shows snapshots of the magnitude of the electrical current density  $\|\boldsymbol {j}\|$ and the magnitude of the velocity
$\|\boldsymbol {j}\|$ and the magnitude of the velocity  $\|\boldsymbol {u} \|$ for three values of the magnitude of the imposed magnetic field:
$\|\boldsymbol {u} \|$ for three values of the magnitude of the imposed magnetic field:  $B=10^{-3}, 10^{-2}, 10^{-1}\ \textrm {T}$. In each panel of figure 12 the electrical current density is shown on the left and the magnitude of the velocity is shown on the right. We observe that the flow becomes steady as
$B=10^{-3}, 10^{-2}, 10^{-1}\ \textrm {T}$. In each panel of figure 12 the electrical current density is shown on the left and the magnitude of the velocity is shown on the right. We observe that the flow becomes steady as  $B$ increases. For the largest value of
$B$ increases. For the largest value of  $B$, we observe that the current density and the fluid motion are localised in a thin vertical cylinder whose two extremities coincide with the contact surfaces with the two wires supplying and extracting the current. In this case the flow is axisymmetric. We ran a 3-D simulation for
$B$, we observe that the current density and the fluid motion are localised in a thin vertical cylinder whose two extremities coincide with the contact surfaces with the two wires supplying and extracting the current. In this case the flow is axisymmetric. We ran a 3-D simulation for  $B=10^{-1}\ \textrm {T}$. The volume-averaged velocity
$B=10^{-1}\ \textrm {T}$. The volume-averaged velocity  $\bar {u}$ is the same in both axisymmetric and 3-D simulations (red point in figure 11), and the 3-D modes (
$\bar {u}$ is the same in both axisymmetric and 3-D simulations (red point in figure 11), and the 3-D modes ( $m \neq 0$) are zero. It seems that high
$m \neq 0$) are zero. It seems that high  $B$ makes the flow more axisymmetric. The reorganisation of the current density distribution in the cell and the drastic reduction of the fluid motion are due to the induction effects generated by the term
$B$ makes the flow more axisymmetric. The reorganisation of the current density distribution in the cell and the drastic reduction of the fluid motion are due to the induction effects generated by the term  $\sigma \boldsymbol {u} \times B \boldsymbol {e}_z$ in (2.1b).
$\sigma \boldsymbol {u} \times B \boldsymbol {e}_z$ in (2.1b).

Figure 12. Variable B, axisymmetric simulations,  $J=50 \ \textrm {A} \ \textrm {m}^{-2}$. The spatial structure of the current density (left) and of the magnitude of the velocity (right) varies significantly when the intensity of the magnetic field increases. For the lowest value of
$J=50 \ \textrm {A} \ \textrm {m}^{-2}$. The spatial structure of the current density (left) and of the magnitude of the velocity (right) varies significantly when the intensity of the magnetic field increases. For the lowest value of  $B$, the flow is turbulent and the current density is barely influenced by inductive effects (
$B$, the flow is turbulent and the current density is barely influenced by inductive effects ( $\sigma \boldsymbol {u} \times B \boldsymbol {e}_z$). For the largest value of
$\sigma \boldsymbol {u} \times B \boldsymbol {e}_z$). For the largest value of  $B$, the induction effects are strong. The flow becomes steady and due to the induction effects the electrical current almost goes in straight lines from the top wire to the bottom wire. The current density is scaled from yellow to purple in the range [0,
$B$, the induction effects are strong. The flow becomes steady and due to the induction effects the electrical current almost goes in straight lines from the top wire to the bottom wire. The current density is scaled from yellow to purple in the range [0, $J_w$], where
$J_w$], where  $J_w=1250\ \textrm {A} \ \textrm {m}^{-2}$ is the imposed current density in the wires.
$J_w=1250\ \textrm {A} \ \textrm {m}^{-2}$ is the imposed current density in the wires.
Note also that we do not observe any Shercliff or Hartmann boundary layers at high magnetic field as in duct flows (Hunt & Stewartson Reference Hunt and Stewartson1965; Moresco & Alboussiere Reference Moresco and Alboussiere2004) in this set-up. Such layers are always localised near the solid boundaries of the domain and channel the electrical current when the Hartmann number
 \begin{equation} Ha = B R \left ( \frac{\sigma}{\rho \nu} \right )^{1/2} \end{equation}
\begin{equation} Ha = B R \left ( \frac{\sigma}{\rho \nu} \right )^{1/2} \end{equation}
is large. Here  $Ha \approx 4,40,400$ for the three simulations reported in figure 12, and does increase from left to right. But in our case the current density and imposed magnetic field are roughly parallel whereas they are perpendicular in the case of duct flows.
$Ha \approx 4,40,400$ for the three simulations reported in figure 12, and does increase from left to right. But in our case the current density and imposed magnetic field are roughly parallel whereas they are perpendicular in the case of duct flows.
3.4. Variable $\nu$, axisymmetric study

We now explore the influence of the viscosity. We fix  $J = 50\ \textrm {A}\ \textrm {m}^{-2}$,
$J = 50\ \textrm {A}\ \textrm {m}^{-2}$,  $B = 1\ \textrm {mT}$, and we artificially vary the viscosity
$B = 1\ \textrm {mT}$, and we artificially vary the viscosity  $\nu$ of the liquid metal. Usually, the viscosity of a liquid metal is between
$\nu$ of the liquid metal. Usually, the viscosity of a liquid metal is between  $10^{-7}$ and
$10^{-7}$ and  $10^{-6}\ \textrm {m}^{2}\ \textrm {s}^{-1}$, but we extend the study to other non-realistic viscosities in order to better understand the flow's behaviour. Only axisymmetric simulations are done. The other numerical parameters used for the simulations are reported in table 3. We focus our attention on the influence of the viscosity on the time- and volume-averaged velocity,
$10^{-6}\ \textrm {m}^{2}\ \textrm {s}^{-1}$, but we extend the study to other non-realistic viscosities in order to better understand the flow's behaviour. Only axisymmetric simulations are done. The other numerical parameters used for the simulations are reported in table 3. We focus our attention on the influence of the viscosity on the time- and volume-averaged velocity,  $\bar {u}$. The results of these simulations in the range
$\bar {u}$. The results of these simulations in the range  $\nu \in [8{\times } 10^{-8}, 3{\times } 10^{-5}]\ \textrm {m}^{2}\ \textrm {s}^{-1}$ are shown in figure 13. For small values of the viscosity, it seems that
$\nu \in [8{\times } 10^{-8}, 3{\times } 10^{-5}]\ \textrm {m}^{2}\ \textrm {s}^{-1}$ are shown in figure 13. For small values of the viscosity, it seems that  $\bar {u} \sim \nu ^{-1/9}$ or
$\bar {u} \sim \nu ^{-1/9}$ or  $\nu ^{0}$ as in (1.2). When the viscosity is large, we observe
$\nu ^{0}$ as in (1.2). When the viscosity is large, we observe  $\bar {u} \sim \nu ^{-1}$, which is a clear indication of the Stokes regime.
$\bar {u} \sim \nu ^{-1}$, which is a clear indication of the Stokes regime.
Table 3. Numerical parameters for the axisymmetric simulations with variable  $\nu$. Mesh size
$\nu$. Mesh size  ${\rm \Delta} l$ (non-uniform meshes, smallest
${\rm \Delta} l$ (non-uniform meshes, smallest  $\longrightarrow$ largest mesh size), time step
$\longrightarrow$ largest mesh size), time step  ${\rm \Delta} t$, non-dimensional numbers
${\rm \Delta} t$, non-dimensional numbers  $\overline {Re} = \bar {u} R / \nu$ and
$\overline {Re} = \bar {u} R / \nu$ and  $\bar {\varPi } = \sigma \bar {u} B / J$.
$\bar {\varPi } = \sigma \bar {u} B / J$.


Figure 13. Variable  $\nu$, axisymmetric simulations. Velocity
$\nu$, axisymmetric simulations. Velocity  $\bar {u}$ as a function of the viscosity
$\bar {u}$ as a function of the viscosity  $\nu$. The slope asymptotes between 0 and
$\nu$. The slope asymptotes between 0 and  $-1/9$ for low viscosities and to
$-1/9$ for low viscosities and to  $-1$ for high viscosities.
$-1$ for high viscosities.
3.5. One master curve for the intensity of flow in the inductionless regime
We have deliberately chosen in the previous sections to report all the results in dimensional form to make clear that the effects of increasing  $J$ and increasing
$J$ and increasing  $B$ are not always equivalent. This difference is mainly due to inductive effects. If
$B$ are not always equivalent. This difference is mainly due to inductive effects. If  $U$ is a typical velocity, we can estimate that induction is not important as long as
$U$ is a typical velocity, we can estimate that induction is not important as long as
 \begin{equation} \varPi = \frac{\sigma U B}{J} \ll 1. \end{equation}
\begin{equation} \varPi = \frac{\sigma U B}{J} \ll 1. \end{equation}
In this inductionless regime, we can group all our previous measures of flow intensity using a non-dimensional representation. A natural scale for velocity in the inertial regime is  $(JB R/\rho )^{1/2}$ and with it, we can define a Reynolds number as
$(JB R/\rho )^{1/2}$ and with it, we can define a Reynolds number as
 \begin{equation} Re_{in} = \left(\dfrac{J B}{\rho}\right)^{1/2} \dfrac{R^{3/2}}{\nu}, \end{equation}
\begin{equation} Re_{in} = \left(\dfrac{J B}{\rho}\right)^{1/2} \dfrac{R^{3/2}}{\nu}, \end{equation}
which only depends on input parameters (hence, subscript  $in$). In figure 14 we plot
$in$). In figure 14 we plot  $\overline {Re} = \bar {u} R / \nu$, the Reynolds number based on the measured velocity as a function of
$\overline {Re} = \bar {u} R / \nu$, the Reynolds number based on the measured velocity as a function of  $Re_{in}$ for the axisymmetric simulations that meet the requirement (3.3) (we only take the data in the range
$Re_{in}$ for the axisymmetric simulations that meet the requirement (3.3) (we only take the data in the range  $B\in [0,2]\ \textrm {mT}$ for the simulations with varying
$B\in [0,2]\ \textrm {mT}$ for the simulations with varying  $B$). It is remarkable that all the data points collapse on a single curve. At high
$B$). It is remarkable that all the data points collapse on a single curve. At high  $Re_{in}$, we observe not unexpectedly that
$Re_{in}$, we observe not unexpectedly that  $\overline {Re} \sim Re_{in}$.
$\overline {Re} \sim Re_{in}$.

Figure 14. Computed Reynolds number  $\overline {Re} = \bar {u} R / \nu$ as a function of input parameter Reynolds numbers
$\overline {Re} = \bar {u} R / \nu$ as a function of input parameter Reynolds numbers  $Re_{in}$ defined in (3.4).
$Re_{in}$ defined in (3.4).
3.6. Scaling laws for swirling EVFs
All our simulations were done in the limit  $\varGamma = {\mu _0 J R}/{B} \ll 1$, where the EVF always has a strong swirling character. Here we explain the different scaling regimes of such swirling EVFs. We introduce
$\varGamma = {\mu _0 J R}/{B} \ll 1$, where the EVF always has a strong swirling character. Here we explain the different scaling regimes of such swirling EVFs. We introduce  $[\boldsymbol {u} ] = U$,
$[\boldsymbol {u} ] = U$,  $[\boldsymbol {j} ] = J$ and
$[\boldsymbol {j} ] = J$ and  $[\boldsymbol {b}] = B$ as typical scales of velocity, current density and magnetic field.
$[\boldsymbol {b}] = B$ as typical scales of velocity, current density and magnetic field.
We start with the large  $B$, inductive regime. When induction, i.e. the term
$B$, inductive regime. When induction, i.e. the term  $(\sigma \boldsymbol {u}{\times } \boldsymbol {b})$, is important in Ohm's law, the Lorentz force acts as a magnetic brake on the bulk flow (Hunt & Malcolm Reference Hunt and Malcolm1968). We conjecture that saturation of flow magnitude occurs when this bulk magnetic braking balances the inductionless part of the Lorentz force with magnitude
$(\sigma \boldsymbol {u}{\times } \boldsymbol {b})$, is important in Ohm's law, the Lorentz force acts as a magnetic brake on the bulk flow (Hunt & Malcolm Reference Hunt and Malcolm1968). We conjecture that saturation of flow magnitude occurs when this bulk magnetic braking balances the inductionless part of the Lorentz force with magnitude  $JB$. This balance implies that
$JB$. This balance implies that
 \begin{equation} U \sim \frac{J }{ \sigma B} \quad \mbox{(inductive)} \end{equation}
\begin{equation} U \sim \frac{J }{ \sigma B} \quad \mbox{(inductive)} \end{equation}
or  $\varPi \sim 1$. This scaling law is coherent with what we observed at high
$\varPi \sim 1$. This scaling law is coherent with what we observed at high  $B$.
$B$.
When induction is not important, when  $\varPi \ll 1$, we can imagine three possible regimes: viscous, intermediate and inertial. For very weak Lorentz forces, the Lorentz force can be balanced by the viscous forces,
$\varPi \ll 1$, we can imagine three possible regimes: viscous, intermediate and inertial. For very weak Lorentz forces, the Lorentz force can be balanced by the viscous forces,  $[\rho \nu \nabla ^{2} \boldsymbol {u} ] \sim [\boldsymbol {j} \times \boldsymbol {b}]$. In this Stokes regime the flow occupies the entire cell, so we can use
$[\rho \nu \nabla ^{2} \boldsymbol {u} ] \sim [\boldsymbol {j} \times \boldsymbol {b}]$. In this Stokes regime the flow occupies the entire cell, so we can use  $[\boldsymbol {r}] = R$ as the length scale. From this balance we then find that
$[\boldsymbol {r}] = R$ as the length scale. From this balance we then find that
 \begin{equation} U \sim \dfrac{J B R^{2}}{\rho \nu}, \quad \text{(inductionless, viscous).}\end{equation}
\begin{equation} U \sim \dfrac{J B R^{2}}{\rho \nu}, \quad \text{(inductionless, viscous).}\end{equation}This viscous regime was clearly visible in our simulations when the flow speed was at its lowest.
For the highest flow intensities, inertia will be dominant in opposing the Lorentz force. Naively speaking, we can simply balance  $[\rho ( \boldsymbol {u}\ \boldsymbol{\cdot }\ {\boldsymbol {\nabla }} ) \boldsymbol {u}] \sim [ \boldsymbol {j} \times \boldsymbol {b}]$ and, using somewhat arbitrarily
$[\rho ( \boldsymbol {u}\ \boldsymbol{\cdot }\ {\boldsymbol {\nabla }} ) \boldsymbol {u}] \sim [ \boldsymbol {j} \times \boldsymbol {b}]$ and, using somewhat arbitrarily  $[\boldsymbol {r}] = R$ as the length scale, we then find that
$[\boldsymbol {r}] = R$ as the length scale, we then find that
 \begin{equation} U \sim \left( \dfrac{J B R}{\rho} \right)^{1/2}, \quad \text{(inductionless, inertial 1/2).} \end{equation}
\begin{equation} U \sim \left( \dfrac{J B R}{\rho} \right)^{1/2}, \quad \text{(inductionless, inertial 1/2).} \end{equation}A more elaborate analysis of the torque balance between the boundary and the bulk (Davidson Reference Davidson1992; Davidson et al. Reference Davidson, Kinnear, Lingwood, Short and He1999) yields
 \begin{equation} U \sim \left(\dfrac{J B R}{\rho} \right)^{5/9} \left( \frac{R}{\nu} \right )^{1/9} , \quad \text{(inductionless, inertial 5/9).} \end{equation}
\begin{equation} U \sim \left(\dfrac{J B R}{\rho} \right)^{5/9} \left( \frac{R}{\nu} \right )^{1/9} , \quad \text{(inductionless, inertial 5/9).} \end{equation}
The inertial regime was clearly visible in our simulations, but we cannot conclude which exponent,  $1/2$ or
$1/2$ or  $5/9$, is more adapted.
$5/9$, is more adapted.
An intermediate regime can sometimes be observed when the viscous effects, the inertial effects and the Lorentz force are all of the same intensity. This is possible because forcing mainly occurs near the electrical contact, in the viscous boundary layer. The scaling law for this intermediate regime is derived in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). Using the  $z$ component of the vorticity equation, the three-term balance requires that
$z$ component of the vorticity equation, the three-term balance requires that  $[ (\boldsymbol {u}\ \boldsymbol{\cdot }\ \boldsymbol {\nabla }) \omega _z - (\boldsymbol {\omega }\ \boldsymbol{\cdot }\ \boldsymbol {\nabla }) u_z ] \sim [ \rho ^{-1} B \partial _z j_z ] \sim [ \nu \partial _{zz}^{2} \omega _z ]$. In a boundary layer of width
$[ (\boldsymbol {u}\ \boldsymbol{\cdot }\ \boldsymbol {\nabla }) \omega _z - (\boldsymbol {\omega }\ \boldsymbol{\cdot }\ \boldsymbol {\nabla }) u_z ] \sim [ \rho ^{-1} B \partial _z j_z ] \sim [ \nu \partial _{zz}^{2} \omega _z ]$. In a boundary layer of width  $\delta$ near the electrical contacts with the wires, we estimate
$\delta$ near the electrical contacts with the wires, we estimate  $[\partial _z] = \delta ^{-1}$ and
$[\partial _z] = \delta ^{-1}$ and  $[\partial _r ]= R^{-1}$. If
$[\partial _r ]= R^{-1}$. If  $[u_r, u_\theta ] = U$ then
$[u_r, u_\theta ] = U$ then  $[u_z] = U \delta R^{-1}$ due to incompressibility. This yields the estimates
$[u_z] = U \delta R^{-1}$ due to incompressibility. This yields the estimates  $[ \omega _r, \omega _\theta ] = U \delta ^{-1}$ and
$[ \omega _r, \omega _\theta ] = U \delta ^{-1}$ and  $[\omega _z] = U R^{-1}$ for the vorticity. Inserting these scales in the three-term balance, we obtain two equivalence relations
$[\omega _z] = U R^{-1}$ for the vorticity. Inserting these scales in the three-term balance, we obtain two equivalence relations  ${U^{2}}/{R^{2}} \sim {JB}/{\rho \delta } \sim {\nu U}/{R \delta ^{2}}$, from which, after eliminating
${U^{2}}/{R^{2}} \sim {JB}/{\rho \delta } \sim {\nu U}/{R \delta ^{2}}$, from which, after eliminating  $\delta$, we find that
$\delta$, we find that
 \begin{equation} U \sim \left(\dfrac{J B}{\rho} \right)^{2/3} \dfrac{R}{\nu^{1/3}}, \quad \text{(inductionless, laminar boundary layer)}, \end{equation}
\begin{equation} U \sim \left(\dfrac{J B}{\rho} \right)^{2/3} \dfrac{R}{\nu^{1/3}}, \quad \text{(inductionless, laminar boundary layer)}, \end{equation}
where the power law  $U \sim J^{2/3}$ was clearly visible in the simulations of Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021), it is much less visible in the present set-up. We think that this may be due to the fact that the von Kármán-like flow, driven here, is rather unstable and easily turbulent in the bulk. If turbulent flow structures reach into the boundary layer, the latter will no longer remain laminar and this will break the subtle three-term balance. In Appendix A) we show that the
$U \sim J^{2/3}$ was clearly visible in the simulations of Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021), it is much less visible in the present set-up. We think that this may be due to the fact that the von Kármán-like flow, driven here, is rather unstable and easily turbulent in the bulk. If turbulent flow structures reach into the boundary layer, the latter will no longer remain laminar and this will break the subtle three-term balance. In Appendix A) we show that the  $2/3$ scaling can also be derived from the model of Davidson (Reference Davidson1992), if one uses a laminar friction law for the viscous stress, which is equivalent to supposing a laminar boundary layer.
$2/3$ scaling can also be derived from the model of Davidson (Reference Davidson1992), if one uses a laminar friction law for the viscous stress, which is equivalent to supposing a laminar boundary layer.
4. Geometrical influences on a swirling EVF
In this section we investigate the influence of the geometry of the cell and of the connecting wires on the fluid flow.
We examine the influence of  $R_w$, the wire radius, the influence of
$R_w$, the wire radius, the influence of  $H$, the cell's height and the impact of using asymmetrical wires as in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). All the simulations are done with the magnetic field magnitude
$H$, the cell's height and the impact of using asymmetrical wires as in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). All the simulations are done with the magnetic field magnitude  $B= 1\ \textrm {mT}$ and with realistic viscosity
$B= 1\ \textrm {mT}$ and with realistic viscosity  $\nu = 3.23{\times } 10^{-7}\ \textrm {m}^{2}\ \textrm {s}^{-1}$.
$\nu = 3.23{\times } 10^{-7}\ \textrm {m}^{2}\ \textrm {s}^{-1}$.
4.1. Variable wire radius $R_w$

As in § 3, we fix the geometry of the cell to be  $(R,H,H_w)=(10,18,4)\ \textrm {cm}$ and vary both the radius
$(R,H,H_w)=(10,18,4)\ \textrm {cm}$ and vary both the radius  $R_w$ of the connecting wires and the current density
$R_w$ of the connecting wires and the current density  $J$. We expect the intensity of the fluid flow generated by the electrovortex to be a decreasing function of the ratio
$J$. We expect the intensity of the fluid flow generated by the electrovortex to be a decreasing function of the ratio  $R_w/R$ (Bojarevičs et al. Reference Bojarevičs, Freibergs, Shilova and Shcherbinin1989).
$R_w/R$ (Bojarevičs et al. Reference Bojarevičs, Freibergs, Shilova and Shcherbinin1989).
We show in figure 15(a) the space-averaged velocity  $u$ as a function of time for the following four values of the ratio
$u$ as a function of time for the following four values of the ratio  $R_w/R$:
$R_w/R$:  $0.2, 0.4, 0.6, 0.8$, and with
$0.2, 0.4, 0.6, 0.8$, and with  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$. These simulations are done assuming axisymmetry. As expected, both the time average of
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$. These simulations are done assuming axisymmetry. As expected, both the time average of  $u$ and the time fluctuations of
$u$ and the time fluctuations of  $u$ increase as the ratio
$u$ increase as the ratio  $R_w/R$ decreases. In figure 15(b) we show
$R_w/R$ decreases. In figure 15(b) we show  $\bar {u}$ as a function of
$\bar {u}$ as a function of  $R_w/R$ for the following five values of
$R_w/R$ for the following five values of  $J$:
$J$:  $5, 50, 100, 500, 2000\ \textrm {A} \ \textrm {m}^{-2}$. In figure 15(c) we show
$5, 50, 100, 500, 2000\ \textrm {A} \ \textrm {m}^{-2}$. In figure 15(c) we show  $u_{bar}$ as a function of J for the following four values of
$u_{bar}$ as a function of J for the following four values of  $R_w/R$: 0.2, 0.4, 0.6, 0.8. Here again, we observe that the flow intensity decreases monotonically as
$R_w/R$: 0.2, 0.4, 0.6, 0.8. Here again, we observe that the flow intensity decreases monotonically as  $R_w/R$ increases. This observation holds for all the values of the current.
$R_w/R$ increases. This observation holds for all the values of the current.

Figure 15. Variable  $R_w$, axisymmetric simulations. Global measures. (a) Time series of the velocity
$R_w$, axisymmetric simulations. Global measures. (a) Time series of the velocity  $u$ for different
$u$ for different  $R_w/R$ and
$R_w/R$ and  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$. Plot of
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$. Plot of  $\bar {u}$ as (b) a function of
$\bar {u}$ as (b) a function of  $R_w/R$ for different
$R_w/R$ for different  $J$, and (c) a function of
$J$, and (c) a function of  $J$ for different
$J$ for different  $R_w/R$. The mean velocity increases with
$R_w/R$. The mean velocity increases with  $J$ and decreases with
$J$ and decreases with  $R_w/R$ and all curves present similar trends.
$R_w/R$ and all curves present similar trends.
In figure 16 we show snapshots of  $\|\boldsymbol {u}\|$ for the following four values of the ratio
$\|\boldsymbol {u}\|$ for the following four values of the ratio  $R_w/R$:
$R_w/R$:  $0.2, 0.4, 0.6, 0.8$ with
$0.2, 0.4, 0.6, 0.8$ with  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$. One axisymmetric and one fully 3-D simulation have been done for each value of
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$. One axisymmetric and one fully 3-D simulation have been done for each value of  $R_w/R$. Three-dimensional simulations have been computed with
$R_w/R$. Three-dimensional simulations have been computed with  $M=20$, as justified in § 3.2. In the axisymmetric simulations (top panels), we always observe a cylindrical region where the fluid is approximately at rest. The diameter of this cylindrical region coincides with that of the connecting wires. In the corresponding 3-D simulations (bottom panels), this low-speed cylindrical core is absent and the flow is overall more turbulent. The flow speed remains close to that of the axisymmetric simulations.
$M=20$, as justified in § 3.2. In the axisymmetric simulations (top panels), we always observe a cylindrical region where the fluid is approximately at rest. The diameter of this cylindrical region coincides with that of the connecting wires. In the corresponding 3-D simulations (bottom panels), this low-speed cylindrical core is absent and the flow is overall more turbulent. The flow speed remains close to that of the axisymmetric simulations.

Figure 16. Variable  $R_w$, axisymmetric and 3-D simulations. Snapshots of the velocity field
$R_w$, axisymmetric and 3-D simulations. Snapshots of the velocity field  $\|\boldsymbol {u}\|$ for
$\|\boldsymbol {u}\|$ for  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$ and different
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$ and different  $R_w/R$. Top row: axisymmetric simulations; bottom row: 3-D simulations. In axisymmetrical simulations we observe low speeds in a cylinder with radius
$R_w/R$. Top row: axisymmetric simulations; bottom row: 3-D simulations. In axisymmetrical simulations we observe low speeds in a cylinder with radius  $R_w$. In 3-D simulations such a low-speed region is less visible and turbulent structures are present everywhere.
$R_w$. In 3-D simulations such a low-speed region is less visible and turbulent structures are present everywhere.
It is tempting to try to model the dependence of the typical flow speed on  $R_w/R$. For non-swirling EVFs (
$R_w/R$. For non-swirling EVFs ( $B=0$), ad hoc fitting laws are given by Vlasyuk (Reference Vlasyuk1987) and Chudnovskii (Reference Chudnovskii1989) proposed a theoretical model based on a meridional contour integral. Unfortunately, one cannot generalize the method of Chudnovskii (Reference Chudnovskii1989) to swirling EVFs. In Appendix B we approximately calculate the torque that the Lorentz force exerts on the bottom half of the fluid domain and how it depends on
$B=0$), ad hoc fitting laws are given by Vlasyuk (Reference Vlasyuk1987) and Chudnovskii (Reference Chudnovskii1989) proposed a theoretical model based on a meridional contour integral. Unfortunately, one cannot generalize the method of Chudnovskii (Reference Chudnovskii1989) to swirling EVFs. In Appendix B we approximately calculate the torque that the Lorentz force exerts on the bottom half of the fluid domain and how it depends on  $R_w$. This calculation requires
$R_w$. This calculation requires  $b_\theta$ right above the electrical contact and we use the
$b_\theta$ right above the electrical contact and we use the  $b_\theta$ profile that is observed with Millere boundary conditions (Millere et al. Reference Millere, Sharamkin and Shcherbinin1980; Herreman et al. Reference Herreman, Nore, Ziebell Ramos, Cappanera, Guermond and Weber2019) or above a uniform current inlet. This yields torques
$b_\theta$ profile that is observed with Millere boundary conditions (Millere et al. Reference Millere, Sharamkin and Shcherbinin1980; Herreman et al. Reference Herreman, Nore, Ziebell Ramos, Cappanera, Guermond and Weber2019) or above a uniform current inlet. This yields torques
 \begin{equation} K = K_0 \begin{cases} 1 - (4R^{2}_w/3R^{2}) & \text{(Millere)}, \\ 1 - R^{2}_w/R^{2} & \text{(uniform)}, \end{cases} \end{equation}
\begin{equation} K = K_0 \begin{cases} 1 - (4R^{2}_w/3R^{2}) & \text{(Millere)}, \\ 1 - R^{2}_w/R^{2} & \text{(uniform)}, \end{cases} \end{equation}
with  $K_0 = \frac 14 I B R^{2}$. Both expressions give a parabolic decay of the torque as
$K_0 = \frac 14 I B R^{2}$. Both expressions give a parabolic decay of the torque as  $R_w/ R$ increases. We compare in figure 17(a) these two expressions with the actual torque obtained from the numerical simulations. We observe that the model based on Millere's approximation is very accurate in the range
$R_w/ R$ increases. We compare in figure 17(a) these two expressions with the actual torque obtained from the numerical simulations. We observe that the model based on Millere's approximation is very accurate in the range  $R_w/R\in [0,0.5]$. We now estimate the dependence of the intensity of the flow motion,
$R_w/R\in [0,0.5]$. We now estimate the dependence of the intensity of the flow motion,  $U$, with respect to
$U$, with respect to  $R_w/R$, by assuming
$R_w/R$, by assuming  $U$ is proportional to torques
$U$ is proportional to torques
 \begin{equation} U \approx U_0 \begin{cases} 1 - (4R^{2}_w/3R^{2}) & \text{(Millere)}, \\ 1 - R^{2}_w/R^{2} & \text{(uniform)}. \end{cases} \end{equation}
\begin{equation} U \approx U_0 \begin{cases} 1 - (4R^{2}_w/3R^{2}) & \text{(Millere)}, \\ 1 - R^{2}_w/R^{2} & \text{(uniform)}. \end{cases} \end{equation}
Here  $U_0$ is the maximum of
$U_0$ is the maximum of  $U$ in the limit
$U$ in the limit  $R_w/R \rightarrow 0$. We show in figure 17(b) the quantity
$R_w/R \rightarrow 0$. We show in figure 17(b) the quantity  $\bar {u}/ {u}_0$ as a function of
$\bar {u}/ {u}_0$ as a function of  $R_w/R$. We also show in this figure the two theoretical profiles
$R_w/R$. We also show in this figure the two theoretical profiles  $1 - \alpha (R^{2}_w/R^{2})$ with
$1 - \alpha (R^{2}_w/R^{2})$ with  $\alpha =4/3$ and
$\alpha =4/3$ and  $1$. We have estimated
$1$. We have estimated  ${u}_0$ by fitting the parabola
${u}_0$ by fitting the parabola  $\bar {u} = {u}_0 ( 1 - \beta (R_w/R)^{2} )$ to the data shown in figure 15(b). This shows that the estimation of the velocity dependence on
$\bar {u} = {u}_0 ( 1 - \beta (R_w/R)^{2} )$ to the data shown in figure 15(b). This shows that the estimation of the velocity dependence on  $R_w/R$ can be quite accurate for intermediate
$R_w/R$ can be quite accurate for intermediate  $J$. However, we do observe that the parabolic profile does not fit very well the data when
$J$. However, we do observe that the parabolic profile does not fit very well the data when  $J$ is very small, a linear profile fits better the data in this limit (see figure 17c).
$J$ is very small, a linear profile fits better the data in this limit (see figure 17c).

Figure 17. Model for the geometrical dependence of flow intensity on wire radius. (a) Normalized torque  $K/K_0$ as a function of
$K/K_0$ as a function of  $R_w/R$. The Millere model works really well for
$R_w/R$. The Millere model works really well for  $R/R_w < 0.6$. (b) Normalized velocity
$R/R_w < 0.6$. (b) Normalized velocity  $\bar {u}/{u}_0$ as a function of
$\bar {u}/{u}_0$ as a function of  $R_w/R$ for high
$R_w/R$ for high  $J$. The orange zone corresponds to the zone between the two theoretical profiles, uniform and Millere. The fit of the velocity works well. (c) Normalized velocity
$J$. The orange zone corresponds to the zone between the two theoretical profiles, uniform and Millere. The fit of the velocity works well. (c) Normalized velocity  $\bar {u}/{u}_0$ for low
$\bar {u}/{u}_0$ for low  $J$. A linear fit seems more accurate for these low current densities.
$J$. A linear fit seems more accurate for these low current densities.
4.2. Variable height $H$

Up until now, all simulations were done in a cell with aspect ratio  $H/R=1.8$. We now vary
$H/R=1.8$. We now vary  $H/R$ and study how this affects the flow. We run axisymmetric simulations where we vary
$H/R$ and study how this affects the flow. We run axisymmetric simulations where we vary  $H$ for several values of the current density
$H$ for several values of the current density  $J$ and keep
$J$ and keep  $(R,R_w,H_w)=(10,2,4) \ \textrm {cm}$.
$(R,R_w,H_w)=(10,2,4) \ \textrm {cm}$.
In figure 18(a) we show the time history of the volume-averaged velocity observed in simulations done with the aspect ratios  $H/R=0.5, 1.0, 1.8$ and with the current density
$H/R=0.5, 1.0, 1.8$ and with the current density  $J = 500 \textrm {A} \ \textrm {m}^{-2}$. We observe that the larger
$J = 500 \textrm {A} \ \textrm {m}^{-2}$. We observe that the larger  $H/R$, the larger
$H/R$, the larger  $u$ and the larger the fluctuations of
$u$ and the larger the fluctuations of  $u$. In figure 18(b–c) we show the quantities
$u$. In figure 18(b–c) we show the quantities  $\bar {u}$ and
$\bar {u}$ and  $\bar {u}_{max}$ as functions of
$\bar {u}_{max}$ as functions of  $J$ for the three considered aspect ratios. The time- and space-averaged velocity scales like
$J$ for the three considered aspect ratios. The time- and space-averaged velocity scales like  $\bar {u} \sim J^{1/2}$ for large values of
$\bar {u} \sim J^{1/2}$ for large values of  $J$ for the three values of
$J$ for the three values of  $H/R$ investigated. The maximal speed
$H/R$ investigated. The maximal speed  $\bar {u}_{max}$ behaves in a slightly different manner. We observe that
$\bar {u}_{max}$ behaves in a slightly different manner. We observe that  $\bar {u}_{max}$ is independent of
$\bar {u}_{max}$ is independent of  $H/R$ when
$H/R$ when  $J$ is large. The power law
$J$ is large. The power law  $\bar {u}_{max} \sim J^{1/2}$ seems to apply when
$\bar {u}_{max} \sim J^{1/2}$ seems to apply when  $H/R$ is large, whereas the power law
$H/R$ is large, whereas the power law  $\bar {u}_{max} \sim J^{2/3}$ seems a better fit when
$\bar {u}_{max} \sim J^{2/3}$ seems a better fit when  $H/R$ is small. With lower
$H/R$ is small. With lower  $H/R$, we observe that the flow is less turbulent (weaker oscillations are, for example, visible in figure 18(a) at
$H/R$, we observe that the flow is less turbulent (weaker oscillations are, for example, visible in figure 18(a) at  $H/R=0.5$). This probably explains why the
$H/R=0.5$). This probably explains why the  $2/3$, laminar boundary layer scaling law applies better in cylinders with a low aspect ratio
$2/3$, laminar boundary layer scaling law applies better in cylinders with a low aspect ratio  $H/R$.
$H/R$.

Figure 18. Variable  $H$, axisymmetric simulations. (a) Time series of
$H$, axisymmetric simulations. (a) Time series of  $u$ for different aspect ratios and
$u$ for different aspect ratios and  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$. The higher the cell is, the more intense and fluctuating the flow is. Plots of (b)
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$. The higher the cell is, the more intense and fluctuating the flow is. Plots of (b)  $\bar {u}$ and (c)
$\bar {u}$ and (c)  $\bar {u}_{max}$ as a function of
$\bar {u}_{max}$ as a function of  $J$. The scaling law 1/2 is observed for each aspect ratio for
$J$. The scaling law 1/2 is observed for each aspect ratio for  $\bar {u}$, but it changes when one looks at
$\bar {u}$, but it changes when one looks at  $\bar {u}_{max}$, where the scaling law 2/3 is better adapted to cells with a smaller aspect ratio.
$\bar {u}_{max}$, where the scaling law 2/3 is better adapted to cells with a smaller aspect ratio.
Figure 19 shows the spatial distribution of  $\|\boldsymbol {u}\|$ in the meridian section for the two current densities
$\|\boldsymbol {u}\|$ in the meridian section for the two current densities  $J = 5, 500\ \textrm {A} \ \textrm {m}^{-2}$ and for the three aspect ratios
$J = 5, 500\ \textrm {A} \ \textrm {m}^{-2}$ and for the three aspect ratios  $H/R=0.5, 1.0, 1.8$. The flow is time independent for the smallest value of the current density
$H/R=0.5, 1.0, 1.8$. The flow is time independent for the smallest value of the current density  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$, but it is turbulent for the larger value
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$, but it is turbulent for the larger value  $J = 500\ \textrm {A} \ \textrm {m}^{-2}$. When the aspect ratio is small, i.e.
$J = 500\ \textrm {A} \ \textrm {m}^{-2}$. When the aspect ratio is small, i.e.  $H/R=0.5$, the fluid motion is somewhat restricted to a small region close to the vertical axis.
$H/R=0.5$, the fluid motion is somewhat restricted to a small region close to the vertical axis.

Figure 19. Variable  $H$, axisymmetric simulations. Snapshots of
$H$, axisymmetric simulations. Snapshots of  $\|\boldsymbol {u}\|$ for (a)
$\|\boldsymbol {u}\|$ for (a)  $J = 5\ \textrm {A} \ \textrm {m}^{-2}$ and (b)
$J = 5\ \textrm {A} \ \textrm {m}^{-2}$ and (b)  $J = 500 \textrm {A} \ \textrm {m}^{-2}$. In cells with small aspect ratios, the flow does not reach the high
$J = 500 \textrm {A} \ \textrm {m}^{-2}$. In cells with small aspect ratios, the flow does not reach the high  $r$ regions. The flow remains localized above and below the electrical contact.
$r$ regions. The flow remains localized above and below the electrical contact.
This localisation will bias the spatial average in  $\bar {u}$ and this likely explains the difference in behaviour of
$\bar {u}$ and this likely explains the difference in behaviour of  $\bar {u}$ and
$\bar {u}$ and  $\bar {u}_{max}$ observed in figure 18(b–c).
$\bar {u}_{max}$ observed in figure 18(b–c).
4.3. Symmetrical vs asymmetrical wires
In our set-up, current is injected and withdrawn using a symmetrical pair of wires with the same diameter  $R_w$. This is different from the asymmetrical cell simulated in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021), that only has one thin wire extracting current at the bottom. We investigate the effect of this symmetrical or asymmetrical current injection by comparing two cells with different connections. We set
$R_w$. This is different from the asymmetrical cell simulated in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021), that only has one thin wire extracting current at the bottom. We investigate the effect of this symmetrical or asymmetrical current injection by comparing two cells with different connections. We set  $R=10 \ \textrm {cm}$ for both cells. In the first cell we fix the aspect ratio to be
$R=10 \ \textrm {cm}$ for both cells. In the first cell we fix the aspect ratio to be  $H/R =1$ and we use connecting wires at the top and bottom of the cell with the same radius and height
$H/R =1$ and we use connecting wires at the top and bottom of the cell with the same radius and height  $(R_w,H_w)=(2,4) \ \textrm {cm}$. For the second cell, we set
$(R_w,H_w)=(2,4) \ \textrm {cm}$. For the second cell, we set  $H/R=0.5$ and we use only one thin wire at the bottom of the cell with
$H/R=0.5$ and we use only one thin wire at the bottom of the cell with  $(R_w,H_w)=(2,4) \ \textrm {cm}$. The current density is supposed uniform and equal to
$(R_w,H_w)=(2,4) \ \textrm {cm}$. The current density is supposed uniform and equal to  $J$ at the top lid as in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). All the simulations are axisymmetric. We fix
$J$ at the top lid as in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). All the simulations are axisymmetric. We fix  $B = 1\ \textrm {mT}$ and
$B = 1\ \textrm {mT}$ and  $\nu = 3.2\times 10^{-7} \ \textrm {m}^{2} \ \textrm {s}^{-1}$, and we vary
$\nu = 3.2\times 10^{-7} \ \textrm {m}^{2} \ \textrm {s}^{-1}$, and we vary  $J$.
$J$.
In figure 20(a) we show the typical velocity magnitude  $\bar {u}$ observed in the two configurations as a function of
$\bar {u}$ observed in the two configurations as a function of  $J$. It appears that
$J$. It appears that  $\bar {u}$ is significantly higher in the asymmetrical set-up than in the symmetrical one. For large values of the current, we observe that
$\bar {u}$ is significantly higher in the asymmetrical set-up than in the symmetrical one. For large values of the current, we observe that  $\bar {u} \sim J^{1/2}$ in the symmetrical set-up, but in the asymmetrical set-up we observe the laminar boundary layer scaling law,
$\bar {u} \sim J^{1/2}$ in the symmetrical set-up, but in the asymmetrical set-up we observe the laminar boundary layer scaling law,  $\bar {u} \sim J^{2/3}$, just as in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). This suggest that the flows are radically different in both configurations, so let us compare their spatial structure.
$\bar {u} \sim J^{2/3}$, just as in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). This suggest that the flows are radically different in both configurations, so let us compare their spatial structure.

Figure 20. Symmetrical and asymmetrical set-ups. (a) Time- and space-averaged magnitude of the velocity  $\bar {u}$ as a function of
$\bar {u}$ as a function of  $J$ in both set-ups. (b) Snapshots of
$J$ in both set-ups. (b) Snapshots of  $\|\boldsymbol {u}\|$ in the symmetrical cell
$\|\boldsymbol {u}\|$ in the symmetrical cell  $H/R=1$ and the asymmetrical cell
$H/R=1$ and the asymmetrical cell  $H/R=0.5$.
$H/R=0.5$.
In figure 20(b) we compare snapshots of  $\|\boldsymbol {u}\|$ in the asymmetrical and symmetrical set-ups for three values of
$\|\boldsymbol {u}\|$ in the asymmetrical and symmetrical set-ups for three values of  $J$. At low
$J$. At low  $J$, the flows are quite comparable in both configurations. The only real difference is the velocity on the axis which is almost zero in the asymmetrical cell contrary to the symmetrical one. For higher
$J$, the flows are quite comparable in both configurations. The only real difference is the velocity on the axis which is almost zero in the asymmetrical cell contrary to the symmetrical one. For higher  $J$, there are significant differences in the flow structure. In the case
$J$, there are significant differences in the flow structure. In the case  $J= 50 \ \textrm {A} \ \textrm {m}^{-2}$, the flow is localized near the axis in the symmetrical set-up, but fills the entire cell in the asymmetrical one. For
$J= 50 \ \textrm {A} \ \textrm {m}^{-2}$, the flow is localized near the axis in the symmetrical set-up, but fills the entire cell in the asymmetrical one. For  $J= 500 \ \textrm {A} \ \textrm {m}^{-2}$, the flow in the symmetrical cell has a vertical structure that is significantly more turbulent. We think that this increased turbulence is due to the mixing layer that is present in the equatorial plane of the symmetrical set-up but is absent in the asymmetrical set-up. Such an equatorial mixing layer loses its stability fairly easily in von Kármán flows (Nore et al. Reference Nore, Tuckerman, Daube and Xin2003, Reference Nore, Tartar, Daube and Tuckerman2004) and here this seems to be just the same. The
$J= 500 \ \textrm {A} \ \textrm {m}^{-2}$, the flow in the symmetrical cell has a vertical structure that is significantly more turbulent. We think that this increased turbulence is due to the mixing layer that is present in the equatorial plane of the symmetrical set-up but is absent in the asymmetrical set-up. Such an equatorial mixing layer loses its stability fairly easily in von Kármán flows (Nore et al. Reference Nore, Tuckerman, Daube and Xin2003, Reference Nore, Tartar, Daube and Tuckerman2004) and here this seems to be just the same. The  $2/3$ scaling regime likely requires a not too turbulent flow in the bulk.
$2/3$ scaling regime likely requires a not too turbulent flow in the bulk.
5. Conclusion
In this paper we have characterized the fluid flow produced by the swirling electrovortex mechanism in a cylinder filled with GaInSn metal. Using axisymmetric and 3-D simulations, we have shown that, for a cylindrical container of aspect ratio  $H/R=1.8$, the flow thus produced shares many similarities with the von Kármán flow driven by two counter-rotating disks. Increasing
$H/R=1.8$, the flow thus produced shares many similarities with the von Kármán flow driven by two counter-rotating disks. Increasing  $J$ leads to a more intense flow and we observe a typical bifurcation sequence in 3-D simulations. First, the axisymmetry is broken in favour of an azimuthal mode
$J$ leads to a more intense flow and we observe a typical bifurcation sequence in 3-D simulations. First, the axisymmetry is broken in favour of an azimuthal mode  $m=2$ with
$m=2$ with  $R_{\rm \pi}$ symmetry. Secondly, there is a Hopf bifurcation and a time-dependent
$R_{\rm \pi}$ symmetry. Secondly, there is a Hopf bifurcation and a time-dependent  $R_{\rm \pi}$ symmetric state is observed. After a third bifurcation,
$R_{\rm \pi}$ symmetric state is observed. After a third bifurcation,  $R_{\rm \pi}$ symmetry is lost and the flow becomes chaotic and turbulent. The spatial structure of the 3-D flow can be significantly different from that observed in axisymmetric simulations but the typical magnitude of the flow in both settings remains comparable.
$R_{\rm \pi}$ symmetry is lost and the flow becomes chaotic and turbulent. The spatial structure of the 3-D flow can be significantly different from that observed in axisymmetric simulations but the typical magnitude of the flow in both settings remains comparable.
One of the main objectives of this study was to provide deeper insights in the various scaling regimes that can exist in swirling EVFs. Simulations done over a wide range of parameters  $J$,
$J$,  $B$ and
$B$ and  $\nu$ have allowed us to identify four flow regimes in which the flow intensity
$\nu$ have allowed us to identify four flow regimes in which the flow intensity  $U$ is given by the following scaling laws:
$U$ is given by the following scaling laws:
 \begin{equation} U \sim \begin{cases} \dfrac{J B R^{2}}{\rho \nu} & \text{(inductionless, viscous regime)}, \\ \left(\dfrac{J B}{\rho}\right)^{2/3} \dfrac{R}{\nu^{1/3}} & \text{(inductionless, laminar boundary layer regime)}, \\ \left(\dfrac{J BR}{\rho}\right)^{1/2} \ \text{or} \ \left(\dfrac{J B R}{\rho} \right)^{5/9} \left ( \dfrac{R}{\nu} \right )^{1/9} & \text{(inductionless, inertial regime)}, \\ \dfrac{J}{\sigma B} & \text{(inductive regime)}. \end{cases} \end{equation}
\begin{equation} U \sim \begin{cases} \dfrac{J B R^{2}}{\rho \nu} & \text{(inductionless, viscous regime)}, \\ \left(\dfrac{J B}{\rho}\right)^{2/3} \dfrac{R}{\nu^{1/3}} & \text{(inductionless, laminar boundary layer regime)}, \\ \left(\dfrac{J BR}{\rho}\right)^{1/2} \ \text{or} \ \left(\dfrac{J B R}{\rho} \right)^{5/9} \left ( \dfrac{R}{\nu} \right )^{1/9} & \text{(inductionless, inertial regime)}, \\ \dfrac{J}{\sigma B} & \text{(inductive regime)}. \end{cases} \end{equation}
The inductive scaling regime for high imposed magnetic fields was already investigated (Malcolm Reference Malcolm1970; Hunt & Malcolm Reference Hunt and Malcolm1968). We find that this regime is not controlled by Hartmann or Shercliff layers. In the inductionless limit ( $\sigma U B /J \ll 1$), the viscous and inertial regimes are fairly classical and previously observed in Bojarevičs et al. (Reference Bojarevičs, Freibergs, Shilova and Shcherbinin1989); Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999); Kolesnichenko et al. (Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020). The intermediate
$\sigma U B /J \ll 1$), the viscous and inertial regimes are fairly classical and previously observed in Bojarevičs et al. (Reference Bojarevičs, Freibergs, Shilova and Shcherbinin1989); Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999); Kolesnichenko et al. (Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020). The intermediate  $2/3$ scaling law reported by Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) is not really observable with the von Kármán-like EVFs. We think that the increased level of turbulence in the bulk of this flow likely has a drastic effect on the delicate three-term balance that governs this regime. The 2/3 law indeed requires a laminar boundary layer; see Appendix A and Davidson (Reference Davidson1992). We also know that it exists as an intermediate regime in duct flows (Poyé et al. Reference Poyé, Agullo, Plihon, Bos, Desangles and Bousselin2020; Vernet et al. Reference Vernet, Pereira, Fauve and Gissinger2021).
$2/3$ scaling law reported by Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021) is not really observable with the von Kármán-like EVFs. We think that the increased level of turbulence in the bulk of this flow likely has a drastic effect on the delicate three-term balance that governs this regime. The 2/3 law indeed requires a laminar boundary layer; see Appendix A and Davidson (Reference Davidson1992). We also know that it exists as an intermediate regime in duct flows (Poyé et al. Reference Poyé, Agullo, Plihon, Bos, Desangles and Bousselin2020; Vernet et al. Reference Vernet, Pereira, Fauve and Gissinger2021).
The geometry of the fluid domain and the radius of the wires have a strong impact on the EVF. We have proposed a simple model that suggests a parabolic decay of flow intensity with increasing wire radius  $R_w/R$. In cells with small aspect ratios
$R_w/R$. In cells with small aspect ratios  $H/R$, the flow is mostly intense above the electrical contact. Our simulations of asymmetrical current injection/withdrawal suggest that the 2/3 scaling law is more easily observed in this case and this is likely due to the fact that the unstable mixing layer is absent.
$H/R$, the flow is mostly intense above the electrical contact. Our simulations of asymmetrical current injection/withdrawal suggest that the 2/3 scaling law is more easily observed in this case and this is likely due to the fact that the unstable mixing layer is absent.
For future work, it would be interesting to study more precisely the transition between the laminar boundary layer regime (2/3) and the inertial regime (1/2). In particular, what happens in the boundary layer? To answer this question, we need extremely well-resolved 3-D simulations without any kind of turbulence model. It is not impossible that the use of turbulence models,  $k{-}\epsilon$ in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999),
$k{-}\epsilon$ in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999),  $k{-}\omega$ in Kolesnichenko et al. (Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020), prevent the subtle (2/3) laminar boundary layer scaling law from being observable. It would also be interesting to have direct numerical simulations of EVFs in other types of cells, such as a hemispherical device (Kharicha et al. Reference Kharicha, Teplyakov, Ivochkin, Wu, Ludwig and Guseva2015) or in a cylinder with a free surface (Kolesnichenko et al. Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020).
$k{-}\omega$ in Kolesnichenko et al. (Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020), prevent the subtle (2/3) laminar boundary layer scaling law from being observable. It would also be interesting to have direct numerical simulations of EVFs in other types of cells, such as a hemispherical device (Kharicha et al. Reference Kharicha, Teplyakov, Ivochkin, Wu, Ludwig and Guseva2015) or in a cylinder with a free surface (Kolesnichenko et al. Reference Kolesnichenko, Frick, Eltishchev, Mandrykin and Stefani2020).
Supplementary movie
Supplementary movie is available at https://doi.org/10.1017/jfm.2022.779.
Funding
The HPC resources were provided by GENCI-IDRIS (grant 2021-0254) in France. J.-L. Guermond acknowledges support from University Paris-Saclay, the National Science Foundation, under grants NSF DMS 1620058, DMS 1619892, the Air Force Office of Scientific Research, USAF, under grant/contract number FA9550-18-1-0397, and the Army Research Office under grant/contract number W911NF-15-1-0517.
Declaration of interests
The authors report no conflict of interest.
Appendix A. The 2/3 scaling law in Davidson (Reference Davidson1992), Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999)
The two- or three-term balance equations we have used in § 3.6 have the advantage of being conceptually simple, but they also hide that complex exchanges of momentum and energy occur between the boundary layer and the bulk regions. A finer approach has been proposed in Davidson (Reference Davidson1992), where the author uses a method based on the balance of angular momentum to derive scaling laws in axisymmetric flows driven by azimuthal body forces per unit mass  $F_\theta$ in the stationary case. An example of such a global balance is
$F_\theta$ in the stationary case. An example of such a global balance is
 \begin{equation} \rho \int_V r F_\theta \, {\rm d}V + \int_{\delta V} r \tau_\theta \, {\rm d} S = 0. \end{equation}
\begin{equation} \rho \int_V r F_\theta \, {\rm d}V + \int_{\delta V} r \tau_\theta \, {\rm d} S = 0. \end{equation}
The volume integral on the left-hand side is the torque induced by the volumic force, and the surface integral is the viscous torque. The term  $\tau _\theta$ is the viscous stress at the boundary. A particular situation considered in Davidson (Reference Davidson1992) consists of assuming that the force
$\tau _\theta$ is the viscous stress at the boundary. A particular situation considered in Davidson (Reference Davidson1992) consists of assuming that the force  $F_\theta$ is due to a transverse magnetic field slowly rotating (magnetic stirring). Denoting by
$F_\theta$ is due to a transverse magnetic field slowly rotating (magnetic stirring). Denoting by  $\omega$ the angular velocity of the magnetic field and assuming that
$\omega$ the angular velocity of the magnetic field and assuming that  $\omega$ is not too large, this force is therein estimated on average to be close to
$\omega$ is not too large, this force is therein estimated on average to be close to
 \begin{equation} F_\theta = \varOmega_f^{2} r \quad \text{with } \varOmega_f = B \left( \frac{\sigma \omega}{ \rho} \right )^{1/2}. \end{equation}
\begin{equation} F_\theta = \varOmega_f^{2} r \quad \text{with } \varOmega_f = B \left( \frac{\sigma \omega}{ \rho} \right )^{1/2}. \end{equation} Using laminar or turbulent wall friction laws for the viscous stress  $\tau _\theta$, the following expressions for the intensity of the swirling bulk flow are derived in Davidson (Reference Davidson1992, equations (25) and (26)):
$\tau _\theta$, the following expressions for the intensity of the swirling bulk flow are derived in Davidson (Reference Davidson1992, equations (25) and (26)):
 \begin{equation} U \sim \varOmega_f R \left ( \frac{\varOmega_f R^{2}}{\nu} \right )^{1/3} \quad \text{(laminar)}, \quad U \sim \varOmega_f R \left ( \frac{\varOmega_f R^{2}}{\nu} \right )^{1/9} \quad \text{(turbulent)}. \end{equation}
\begin{equation} U \sim \varOmega_f R \left ( \frac{\varOmega_f R^{2}}{\nu} \right )^{1/3} \quad \text{(laminar)}, \quad U \sim \varOmega_f R \left ( \frac{\varOmega_f R^{2}}{\nu} \right )^{1/9} \quad \text{(turbulent)}. \end{equation}
At the end of § 3.1 in Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999), the authors refer to these expressions when they briefly formulate turbulent scaling laws for swirling EVFs (see also (1.2) and the related discussion in the introduction). Since the analogies made therein are not entirely clear to us, we propose to revisit this presentation and give a slightly different point of view. Using (A2), the above two scaling laws can be rewritten as  $U \sim F_\theta ^{2/3} R/\nu ^{1/3}$ in the laminar case and
$U \sim F_\theta ^{2/3} R/\nu ^{1/3}$ in the laminar case and  $U \sim (F_\theta R)^{5/9} (R/\nu )^{1/9}$ in the turbulent case. Replacing the body force
$U \sim (F_\theta R)^{5/9} (R/\nu )^{1/9}$ in the turbulent case. Replacing the body force  $F_\theta \sim JB/\rho$ to cover the case of a swirling EVF, we obtain the following scaling laws for the flow intensity of the swirling EVF:
$F_\theta \sim JB/\rho$ to cover the case of a swirling EVF, we obtain the following scaling laws for the flow intensity of the swirling EVF:
 $$\begin{gather} U \sim \left(\dfrac{J B}{\rho} \right)^{2/3} \dfrac{R}{\nu^{1/3}} \quad \text{(laminar)}, \end{gather}$$
$$\begin{gather} U \sim \left(\dfrac{J B}{\rho} \right)^{2/3} \dfrac{R}{\nu^{1/3}} \quad \text{(laminar)}, \end{gather}$$ $$\begin{gather}U \sim \left(\dfrac{J B R}{\rho} \right)^{5/9} \left( \frac{R}{\nu} \right)^{1/9} \quad \text{(turbulent)}. \end{gather}$$
$$\begin{gather}U \sim \left(\dfrac{J B R}{\rho} \right)^{5/9} \left( \frac{R}{\nu} \right)^{1/9} \quad \text{(turbulent)}. \end{gather}$$This simple argument yields the  $5/9$ scaling law of Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999); it also recovers the
$5/9$ scaling law of Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999); it also recovers the  $2/3$ law that we have observed in our simulations and in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). The
$2/3$ law that we have observed in our simulations and in Herreman et al. (Reference Herreman, Nore, Cappanera and Guermond2021). The  $2/3$ exponent is just the manifestation of a laminar boundary layer, with its laminar boundary layer friction law. The model of Davidson (Reference Davidson1992), Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999) also allows the
$2/3$ exponent is just the manifestation of a laminar boundary layer, with its laminar boundary layer friction law. The model of Davidson (Reference Davidson1992), Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999) also allows the  $2/3$ scaling law.
$2/3$ scaling law.
Appendix B. Dependence of $U$ with respect to $R_w/R$


The method we propose to model the dependence of flow intensity on  $R_w/R$ is motivated by the torque balance of Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999). Approximating the Lorentz force as
$R_w/R$ is motivated by the torque balance of Davidson et al. (Reference Davidson, Kinnear, Lingwood, Short and He1999). Approximating the Lorentz force as  $\boldsymbol {j} \times \boldsymbol {B} \approx - j_r B \boldsymbol {e}_\theta$, the axial torque balance between the Lorentz force and the viscous stress gives
$\boldsymbol {j} \times \boldsymbol {B} \approx - j_r B \boldsymbol {e}_\theta$, the axial torque balance between the Lorentz force and the viscous stress gives
 \begin{equation} \underbrace{\int_V r j_r B \, {\rm d}V }_{K} \approx \int_{\delta V} r \tau_\theta \, {\rm d} S. \end{equation}
\begin{equation} \underbrace{\int_V r j_r B \, {\rm d}V }_{K} \approx \int_{\delta V} r \tau_\theta \, {\rm d} S. \end{equation}
When  $V$ is the entire fluid domain, the left integral is zero due to symmetry. Let us consider this balance with
$V$ is the entire fluid domain, the left integral is zero due to symmetry. Let us consider this balance with  $V$, the bottom half of the cell (similar to the asymmetrical cell with a thin wire connected at the bottom of the cell and an extended wire at the top). Considering that
$V$, the bottom half of the cell (similar to the asymmetrical cell with a thin wire connected at the bottom of the cell and an extended wire at the top). Considering that  $j_r \approx - \mu _0^{-1} \partial _{z} b_\theta$, due to Ampère's law, and supposing axisymmetry, the expression for the torque induced by the Lorentz force simplifies as
$j_r \approx - \mu _0^{-1} \partial _{z} b_\theta$, due to Ampère's law, and supposing axisymmetry, the expression for the torque induced by the Lorentz force simplifies as
 \begin{equation} K = \frac{2 {\rm \pi}B}{\mu_0} \int_{0}^{R} ( b_\theta |_{z={-} H} - b_\theta |_{z=0} ) r^{2} \, {\rm d}r. \end{equation}
\begin{equation} K = \frac{2 {\rm \pi}B}{\mu_0} \int_{0}^{R} ( b_\theta |_{z={-} H} - b_\theta |_{z=0} ) r^{2} \, {\rm d}r. \end{equation}
Since in our simulations we have access to the magnetic field at the top and bottom of the cell, the radial integral can be numerically evaluated. A theoretical approximation can also be obtained as follows. Since we enforce  $\boldsymbol {j} |_{z=0}= J \boldsymbol {e}_z$ at the top of the cell, we have
$\boldsymbol {j} |_{z=0}= J \boldsymbol {e}_z$ at the top of the cell, we have
 \begin{equation} b_\theta |_{z=0} = \frac{\mu_0 I r}{2 {\rm \pi}R^{2}}. \end{equation}
\begin{equation} b_\theta |_{z=0} = \frac{\mu_0 I r}{2 {\rm \pi}R^{2}}. \end{equation}
On the insulating part of the bottom surface, that is, for  $r\in [R_w, R]$, the magnetic field is directly available from the boundary conditions (2.4) or Ampère's law. Then recalling that
$r\in [R_w, R]$, the magnetic field is directly available from the boundary conditions (2.4) or Ampère's law. Then recalling that  $I=J/ {\rm \pi}R^{2}$, we obtain
$I=J/ {\rm \pi}R^{2}$, we obtain
 \begin{equation} \text{for $r \in [R_w,R]$}, \quad b_\theta |_{z ={-} H} = \frac{\mu_0 I }{2 {\rm \pi}r}. \end{equation}
\begin{equation} \text{for $r \in [R_w,R]$}, \quad b_\theta |_{z ={-} H} = \frac{\mu_0 I }{2 {\rm \pi}r}. \end{equation}
Above the electrical contact, for  $r\in [0,R_w]$, we consider two limiting cases. It is shown in Herreman et al. (Reference Herreman, Nore, Ziebell Ramos, Cappanera, Guermond and Weber2019) that the Millere approximation is well adapted if the connecting wire is very thin with respect to
$r\in [0,R_w]$, we consider two limiting cases. It is shown in Herreman et al. (Reference Herreman, Nore, Ziebell Ramos, Cappanera, Guermond and Weber2019) that the Millere approximation is well adapted if the connecting wire is very thin with respect to  $R$ (see Millere et al. Reference Millere, Sharamkin and Shcherbinin1980). If, instead, the connecting wire is thick, it is reasonable to assume that the current density is close to being uniform. These two limiting cases give
$R$ (see Millere et al. Reference Millere, Sharamkin and Shcherbinin1980). If, instead, the connecting wire is thick, it is reasonable to assume that the current density is close to being uniform. These two limiting cases give
 \begin{equation} \text{for $r \in [0,R_w]$}, \quad b_\theta |_{z ={-} H} = \frac{\mu_0 I}{2{\rm \pi} } \begin{cases} ( 1 - \sqrt{ 1- (r/R_w)^{2} } )/ r & \text{(Millere)}, \\ r / R_w^{2} & \text{(uniform)}. \end{cases} \end{equation}
\begin{equation} \text{for $r \in [0,R_w]$}, \quad b_\theta |_{z ={-} H} = \frac{\mu_0 I}{2{\rm \pi} } \begin{cases} ( 1 - \sqrt{ 1- (r/R_w)^{2} } )/ r & \text{(Millere)}, \\ r / R_w^{2} & \text{(uniform)}. \end{cases} \end{equation}
With the above expressions, we then calculate the dependence of the torque (4.1) on  $R_w/R$ that is copied into that of the flow intensity (4.2).
$R_w/R$ that is copied into that of the flow intensity (4.2).



















































































































































































