



Introduction
Effective weed control has long been recognized as critical for agricultural production (Utstumo et al. Reference Utstumo, Urdal, Brevik, Dørum, Netland, Overskeid and Tommy2018), yet weeds remain a major constraint to production and economic return in many agroecosystems (Gallandt and Weiner Reference Gallandt, Weiner and Zimdahl2007; Jackson et al. Reference Jackson, Ramirez, Yokota, Fennimore, Koike, Henderson and Klonsky2004). Although herbicides are the primary form of weed control in global cropping systems, herbicide-resistant weeds and the failure to commercialize any new herbicide modes of action over the past 30 years has led some to conclude that herbicides may have a limited future (Davis and Frisvold Reference Davis and Frisvold2017; Duke Reference Duke2012). In specialty crops (e.g., fruit, herbs, and vegetables), labor shortages and a lack of effective herbicides have prompted increasing interest in the development of autonomous robotic weeders for both conventional and organic systems (Fennimore and Cutulle Reference Fennimore and Cutulle2019; Fennimore et al. Reference Fennimore, Slaughter, Siemens, Leon and Saber2016; Yunez-Naude et al. Reference Yunez-Naude, Taylor and Charlton2012).
State-of-the-art physical weeding technologies presently are focused on tractor-mounted implements, using global positioning system (GPS) or camera guidance to improve precision (i.e., closeness to crop rows) and working rates, as well as tools designed for intrarow weeding in crops that are widely spaced within rows (e.g., cabbage, head lettuce). Rasmussen et al. (Reference Rasmussen, Griepentrog, Nielsen and Henriksen2012) described tools that used sensors or mapping to selectively target intrarow weeds as “intelligent weeders.” Commercially available intelligent weeders, such as the Robovator (F. Poulsen Engineering ApS, Hvalsø, Denmark) or the Robocrop (Tillett and Hague Technology Ltd., England), are tractor-mounted implements that use “machine detection” to locate weeds and a metal hoeing device or “actuator” to kill the weeds (Fennimore and Cutulle Reference Fennimore and Cutulle2019). Machine-detection techniques may involve processing images taken while the tractor is in motion, prerecording sown crop positions with GPS, or the interruption of a light beam directed over the crop row (Tillet et al. Reference Tillet, Hague, Grundy and Dedousis2007).
Lati et al. (Reference Lati, Siemens, Rachuy and Fennimore2016) found that the Robovator improved weed control 18% to 41% compared with a standard cultivator, and Fennimore et al. (Reference Fennimore, Smith, Tourte, LeStrange and Rachuy2014) found that the Robocrop reduced weed densities in transplanted crops by 85%. These two tractor-mounted weeding machines rely on cameras to detect crop plants and precise measurement of forward speed to time movement of weeding tools in and out of crop rows, avoiding damage to the widely spaced crop plants. Although several intelligent weeding systems, such as those mentioned here, are commercially available, the cost associated with camera- and GPS-guided detection systems can be prohibitive for smaller farms (Grimstad et al. Reference Grimstad, Pham, Phan and From2015; Peruzzi et al. Reference Peruzzi, Martelloni, Frasconi, Fontanelli, Pirchio and Raffaelli2017). In field experiments with the Robovator, Melander et al. (Reference Melander, Lattanzi and Pannacci2015) found that the investment cost for an intelligent weeder can be as much as 13 times that of widely available, nonintelligent, intrarow weeders (e.g., torsion or finger weeders). During the early years of intelligent and autonomous weeding systems, investment costs will most likely be high because of the technologies used for plant detection (Fennimore et al. Reference Fennimore, Slaughter, Siemens, Leon and Saber2016) and possibly elevated rates of crop damage in direct seeded crops (Fennimore et al. Reference Fennimore, Smith, Tourte, LeStrange and Rachuy2014).
Future weeding machines will surely be fully autonomous—true robots—but this remains a challenging goal. Merfield (Reference Merfield2016) suggested that “every mechanical weeding job is different, requiring different weeders and different adjustments of the machinery.” Furthermore, Merfield (Reference Merfield2016) suggested that a “genuine weeding robot” should be able to monitor both crops and weeds to determine optimal management implementation as well as make real-time adjustments to tool settings and perform basic tool maintenance. The Dino (Naïo Technologies, Escalquens, France) is an example of an autonomous weeding robot commercially available today that uses GPS-guided systems to cultivate as close to crops as possible (Pérez-Ruiz et al. Reference Pérez-Ruiz, Slaughter, Gliever and Upadhyaya2012). However, like the Robocrop and Robovator, its complex design currently comes at a potentially prohibitive capital cost (Melander et al. Reference Melander, Lattanzi and Pannacci2015). Autonomous weeding-robot subscription services are a possible answer to the potentially prohibitive capital costs associated with purchasing and operating expensive autonomous weeders (Naïo Technologies Reference Naïo2020).
Franklin Robotics (Billerica, MA) recently commercialized Tertill™, an autonomous, solar-powered weeding robot for home gardeners that demonstrates parsimony of design. Instead of complex, heavy, and energy-consuming camera- or GPS-guided detection systems, the Tertill operates much like a Roomba® (iRobot, Bedford, MA) home vacuum cleaner, using capacitive sensors on its sides to detect and avoid obstacles such as large crops and walls, respectively. Tertill has an additional capacitive sensor on its bottom that detects small weeds and activates a weed-whacking mechanism (Figure 1). Control of small seedlings is achieved both by this sensor and temporally random activation of the weed whacker. Designed to independently traverse an enclosed area, the Tertill is programmed with a random walk function, moving on four cambered wheels, or “grousers,” suitable for moderately rough terrain. After a successful crowdsource funding campaign, the Tertill was shipped to home-gardening enthusiasts in September 2018 and was subsequently made commercially available.

Figure 1. Underside of the Tertill™, showing four wheels or “grousers,” weed-whacking mechanism, capacitive sensors, and solar panel.
Our aim was to investigate the performance of the Tertill in a controlled environment on broadleaf and grass surrogate weeds. Observation of our early trials suggested the grousers as well as the weed whacker were controlling weed seedlings, prompting an additional series of experiments examining this serendipitous weeding mechanism. The objectives of this study were to investigate the ability of the Tertill to control broadleaf and grass weeds, with and without its string-trimmer–like weeding implement, and to evaluate grass weed control over time. We hypothesized that given a sufficiently sized area and daily use, the Tertill would more effectively control broadleaf weeds than grass weeds, because of the lower placement of a grass’s meristem.
Methods and Materials
An experimental arena (6.7 × 1.5 m) was constructed in the University of Maine Roger Clapp Greenhouse in Orono, Maine. The arena was lined with black woven landscape fabric and filled with a 7-cm layer of vermiculite beneath a 10-cm layer of field soil; a Pushaw silt loam that was collected from the University of Maine Rogers Farm (44.93°N, 68.70°W).
Weed control efficacy was determined by the percentage of weeds killed by the Tertill in permanent quadrats (Evans et al. Reference Evans, Bellinder and Hahn2012). Condiment mustard [Brassica juncea (L.) Czern.] was used as a surrogate weed (Rasmussen Reference Rasmussen1991) to simulate a stand of broadleaf weeds; pearl millet was used instead for later experiments to determine efficacy with a monocot species. Prior to seeding, the experimental arena was scuffle hoed and flattened with a bed-shaping rake to remove any surviving surrogate or ambient weeds. For each iteration of the study, surrogate weeds were hand broadcast at 2,800 seeds m−2 and raked into the soil with a bed-shaping rake (Brown and Gallandt Reference Brown and Gallandt2018; Olsen et al. Reference Olsen, Kristensen, Weiner, Kristensen and Weiner2005). The resulting average surrogate weed density was 256 plants m−2 quadrat across experiments. Because of the presence of weed seed in the field soil, ambient weeds were counted along with the surrogates. However, the population was small and declined over time (Sanchez and Gallandt, unpublished data). We did not expect the low ambient-weed population to affect the performance of the Tertill and, therefore, it was not included in analysis in this article.
During our methods development, observation of the working Tertill indicated that the grousers (wheels) caused considerable shallow soil disturbance, possibly resulting in the uprooting or burial of weed seedlings (Figure 2). Thus, our first series of experiments was designed to examine the proportion of weed death caused by the weed whacker relative to the soil disturbance caused by the grousers. The arena was divided into 1.5 × 1.6 m sections in which the robot was released for 30 min. The 30-min duration was arbitrarily chosen to ensure that the Tertill adequately demonstrated its weed-controlling ability while also ensuring that a sufficient number of surrogate weeds would remain for subsequent counting (Vanhala et al. Reference Vanhala, Kurstjens, Ascard, Bertram, Cloutier, Mead, Raffaelli and Rasmussen2004). Because the Tertill operates using a random walk, rather than a programmed path, we did not account for spatially repeated weed control. Robots were tested with and without the standard weed-whacker attachment. Weed-control efficacy was measured in five randomly placed 0.125-m2 quadrats. Quadrat placement was marked using golf tees that were pushed level with the soil to ensure no interference with the robots. Within these quadrats, pre- and posttreatment counts of surrogate weeds were conducted to assess efficacy, which was calculated using Equation 1:
 $${\rm Efficacy}\ (%) = ({\rm D}_{\rm b} - {\rm D}_{\rm a})/{\rm D}_{\rm b}$$
$${\rm Efficacy}\ (%) = ({\rm D}_{\rm b} - {\rm D}_{\rm a})/{\rm D}_{\rm b}$$
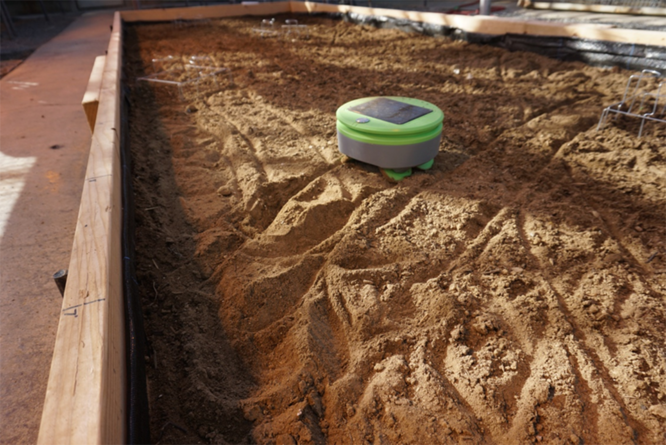
Figure 2. Soil disturbance caused by grousers.
where Db was the pretreatment density of surrogate weeds in each quadrat and Da was the posttreatment density of surrogate weeds in each quadrat. Experiments were replicated over time. The grouser efficacy experiments were replicated three times using mustard and five times using pearl millet.
A subsequent series of experiments was designed to better understand the effect of the robot in monocot weed species, such as pearl millet, that were expected to regrow after mowing, because of the location of the plant’s intercalary meristem. Franklin Robotics recommends that gardeners place a Tertill in a freshly weeded, enclosed garden. The 6.7 × 1.5 m arena was divided into five designated blocks to mitigate effects of an observed ambient soil-moisture gradient. Ten permanent quadrats were randomly placed across the arena with 2 quadrats per block. The arena was seeded with pearl millet, and the robot was released daily, starting immediately after seeding. In the first experiment, the robot ran for 53 min before shutting down to recharge via solar panel. This duration was used for all subsequent iterations of the experiment. Because sunlight was not always adequate, given the northern latitude and time of year, the robot was charged overnight rather than relying on its built-in solar panel. Posttreatment counts were conducted 24 h after each daily use for 1 wk. Evaluation of daily deployment aimed to mimic continuous weeding with Tertill as experienced after release in a weed-free garden; this experiment was replicated three times with pearl millet.
Statistical analyses were conducted in JMP, version 14 (SAS Institute Inc., Cary, NC). To evaluate the grousers, treatment efficacy means, averaged over replicate quadrats (n = 4), were compared using Wilcoxon signed-rank tests because of non-normality of the data. To avoid confounding effects due to regrowth between treatment and posttreatment weed counts, efficacy was also calculated on the second day after treatment. Another Wilcoxon signed-rank test was conducted to compare efficacy from both 1 and 2 d after the treatment.
To evaluate the effects of daily use, means for day were averaged over replicate quadrats (n = 10) and plotted across the 5 d during which the robot was assessed. A regression analysis was used to examine the relationship between time and efficacy.
Results and Discussion
Weed Control Contribution of Grousers
In trials using condiment mustard, efficacy ranged from 60% to 72% with the weed whacker but was reduced to 4% to 39% without the weed whacker. In pearl millet trials, efficacy similarly ranged from 54% to 75% and 16% to 29% with and without the weed whacker, respectively. Rates of efficacy with the weed whacker are similar to those found by Gallandt (Reference Gallandt2010) and Gallandt et al. (Reference Gallandt, Brainard and Brown2018), who noted a mean efficacy of 70% with colinear hoes and an overall mean efficacy of 66% for tractor-mounted implements, respectively. Although efficacy was greatest with the combined action of the grousers and weed-whacking implement, the grousers alone contributed 16% and 22% efficacy in the mustard and pearl millet trials, respectively (Figure 3). Operation of the weed whacker improved weed-control efficacy for both mustard and pearl millet (P = 0.0006 and P = 0.0001, respectively). In addition, there was no difference in efficacy between mustard and pearl millet when surrogate counts were conducted 24 h after weeding (P = 0.6221), suggesting that the Tertill was as effective in both the grass and broadleaf species tested in this study. Also, there were no differences between counts conducted 1 and 2 d after the treatment (P = 0.7289; data not shown).

Figure 3. Weed-control efficacy when Tertill™ was equipped with weed-whacking implement and without. Means from three replicate experiments using condiment mustard and five replicate experiments using pearl millet as surrogates. Error bars show the SEM.
Effect of Daily Use on Weed Pressure
Density of the pearl millet increased rapidly before declining at a slower rate (data not shown). This was likely due to the meristem of seedlings being too low for the weed whacker to kill the seedlings initially. Linear regression analysis of efficacy over time indicated a negative trend (Figure 4), reflecting the ability of the Tertill to decrease the density of pearl millet within the arena over time (R 2 = 0.9617).

Figure 4. Pearl millet density recorded daily and plotted across 5 d. Error bars show the SEM. Best fit line equation: y = −1.12× + 11.113 (R2 = 0.9617).
Implications for Future Research
Autonomous weeding robots represent a possible solution to the stagnation of herbicide development and the occurrence of labor shortages in high-value fruit and vegetable crops, and perhaps also a way to address intractable problems with herbicide-resistant weeds. The Tertill is a viable form of weed control for a home gardener, with high rates of efficacy in both annual grass and broadleaf surrogate weeds. We found that the Tertill was effective when used daily in a garden, as recommended by its manufacturers. Although the robot was more effective when it was using its weed whacker, the serendipitous discovery of the weed-controlling potential of its grousers is an opportunity for future design enhancements to improve this mechanism.
In its current form, the Tertill would require modification to be viable for farm-scale use. In a commercial agricultural setting, a farm-scale autonomous weeding robot would need to overcome several shortcomings apparent with the Tertill. Although its modest design allows the Tertill to be lightweight, inexpensive, and simple to use, a farmer will demand greater efficacy, increased working rates, and perhaps the ability to work in conjunction with additional robots. In addition, although the Tertill is designed to work in widely spaced crops, farm-scale autonomous robots will need to control weeds between and within rows of crops of many spatial arrangements. These improvements will likely come at the cost of simplicity and may result in increased capital costs.
Given the working rates we observed, it would take one Tertill approximately 353 h to cover 1 acre; 40 units could cover an acre in approximately 8 h. For comparison, based on working rates determined in a field study by Gallandt (Reference Gallandt2010), it would take approximately 19 h to weed 1 acre by hand using a stirrup hoe. Although using multiple units would increase working rates, it would require a system of path planning and communication among the robots to minimize overlap in coverage. Improvements such as the ability to communicate as part of a swarm would require a system for communication among robots, path planning, optimization, and supervision. This is the approach of the Mobile Agricultural Robot Swarms system for autonomous farming operations (Blender et al. Reference Blender, Buchner, Fernandez, Pichlmaier and Schlegel2016). McAllister et al. (Reference McAllister, Osipychev, Davis and Chowdhary2019) found that as the number of robot units in a field increases, information sharing strongly improves overall system performance.
Beyond the technological complexities associated with developing autonomous weeding robots, there are several real-world considerations for which new robots should be evaluated. Successful robotic weeding systems will be designed to perform in the context of variable weed (1) density (i.e., seedbanks) and (2) diversity; and these factors will vary over (3) time and (4) space. The density of weeds varies widely. Although seedbank densities on conventional farms may be relatively low and predictable, densities on organic farms vary widely. Jabbour et al. (Reference Jabbour, Gallandt, Zwickle, Wilson and Doohan2014) found germinable seed densities ranged from 2,775 m−2 to 24,678 m−2 on 23 New England farms. Species abundance and richness of weed communities also vary across farms (Crowder and Jabbour Reference Crowder and Jabbour2014). Weed communities vary in time and space. Seasonal emergence periodicity results in a dynamic community with changing species, size, and density (Gallandt et al. Reference Gallandt, Brainard and Brown2018). Emergence periodicity has long been important in designing weed-control strategies (Egley and Williams Reference Egley and Williams1991; Stoller and Wax Reference Stoller and Wax1973). The spatial heterogeneity of weeds results in populations dispersed in patches that may range in size from fractions of a hectare to many hectares (Cardina et al. Reference Cardina, Johnson and Sparrow1997), further complicating field research but representing an important consideration for the development of any physical weed-controlling implement (Lindquist et al. Reference Lindquist, Dieleman, Mortensen, Johnson and Wyse-Pester1998). Soil conditions such as moisture content, organic matter, textural class, residues, and heterogeneity across fields can affect the action of traditional physical weeding tools (Kurstjens et al. Reference Kurstjens, Kropff and Perdok2004; Mohler Reference Mohler1996). Weeding robots may offer a solution to the problem of constantly changing weed conditions, but these changes in species and density must be considered in their design. As complex plant-sensing technologies become more democratized, it is imperative that future research regarding autonomous weeding is contextualized in real-world scenarios.
There must also be greater focus placed on actuator components. In a review of 55 mechanical-cultivation studies, Gallandt et al. (Reference Gallandt, Brainard and Brown2018) found that efficacy of mechanical cultivation tools is low and highly variable. Autonomous weeding robots would benefit from increased actuator response times, which would increase working rates (Fennimore and Cutulle Reference Fennimore and Cutulle2019). Improving actuator components should be a goal to ensure efficient use of robotic technologies.
Weeds remain a challenge in agricultural production systems globally; thus, technologies to reduce weeding labor and overcome challenges associated with herbicide resistance are a pressing need. Autonomous weeding machines represent an emerging solution. We found the simple design of Franklin Robotics’ Tertill to be effective for use at home-garden scales, and though we do not recommend its deployment on the farm scale at this time, we believe this tool offers insights to inform development of future farm-scale weeding robots. Furthermore, we believe the development of future intelligent and autonomous weeders should be contextualized by real-world considerations.
Acknowledgements
This work was supported by the U.S. Department of Agriculture (USDA) National Institute of Food and Agriculture (NIFA) Hatch Project, “Efficacy and sustainability of seedling- vs. seed-focused weed management” (accession no. 1006745; project no. ME021606); E. Gallandt, project director. Maine Agricultural and Forest Experiment Station Publication Number 3764. This work was also supported by USDA NIFA Organic Agriculture Research and Extension Initiative Award 2018-51300-28426 (Title: “Integrating Advanced Cultural and Mechanical Strategies for Improved Weed Management in Organic Vegetables Project”; director: Eric Gallandt). We thank Joe Jones of Franklin Robotics, Maxwell Buskey, Jordan Parks, and Dr. Sonja Birthisel. No conflicts of interest have been declared.




