



1. Introduction
Floating ice covers have been important for transport and field operations in cold regions for many years. For example, in Canada ice roads are used by quite heavy vehicles in winter, and essential supplies for scientists in Antarctica have been delivered by large Hercules aircraft landing on the ice at McMurdo Sound. Such operations are usually safe, but there have been occasions where vehicles have gone through the ice cover. There is a critical speed for a moving load on an ice cover, associated with a resonant response that can become so large it must be avoided in such operations. On the other hand, the resonance may be exploited to break up an ice cover, as on the Saint Lawrence Seaway using hovercraft. The monograph ‘Moving Loads on Ice Plates’ by Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996) summarised the theory and various field experiments that had been undertaken until 1996, providing scientists and practitioners with a concise source of information and understanding of the ice response, so often very different from that due to a stationary load.
The typical mathematical model in the literature envisages a thin elastic plate floating on an incompressible fluid of finite depth, representing the ice sheet and underlying water, respectively. Predictions from associated linear theory have proven remarkably consistent with field observations by Takizawa and others, including the hierarchy of load speed dependent responses (cf. chapters 5 and 6 of Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996) – and there has been recent reconfirmation of the planar wave patterns via remote sensing (cf. Babaei et al. Reference Babaei, van der Sanden, Short and Barrette2016; van der Sanden & Short Reference Van der Sanden and Short2017). The critical speed is the minimum phase speed  $c_{min}$ of flexural-gravity waves in the system where the resonant response develops over time due to the continual accumulation of energy when the load moves steadily at that speed, since
$c_{min}$ of flexural-gravity waves in the system where the resonant response develops over time due to the continual accumulation of energy when the load moves steadily at that speed, since  $c_{min}$ coincides with the group speed
$c_{min}$ coincides with the group speed  $c_g$ at the corresponding critical wavenumber
$c_g$ at the corresponding critical wavenumber  $k_{min}$.
$k_{min}$.
The linear theory for a line load defined the two-dimensional response in the line of motion of the load, but the additional dimension inherent in the theory for a point or distributed load had notable consequences (cf. Nugroho et al. Reference Nugroho, Wang, Hosking and Milinazzo1999). Most notably, the three-dimensional theory showed that the gravity wave speed  $\sqrt {gH}$ (where
$\sqrt {gH}$ (where  $g$ is the gravitational acceleration and
$g$ is the gravitational acceleration and  $H$ denotes the water depth) approached as the wavenumber
$H$ denotes the water depth) approached as the wavenumber  $k\rightarrow 0$ is not critical in the sense of
$k\rightarrow 0$ is not critical in the sense of  $c_{min}$, and the time evolution of the responses due to an impulsively started load was found to be shorter in general. However, both the two-dimensional and three-dimensional linear theory identified
$c_{min}$, and the time evolution of the responses due to an impulsively started load was found to be shorter in general. However, both the two-dimensional and three-dimensional linear theory identified  $\sqrt {gH}$ as the lower bound on the load speed for the onset of the so-called shadow zone (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996), where there are no gravity-dominated waves behind the moving load. Drawing a correspondingly higher horizontal line representing a higher load speed
$\sqrt {gH}$ as the lower bound on the load speed for the onset of the so-called shadow zone (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996), where there are no gravity-dominated waves behind the moving load. Drawing a correspondingly higher horizontal line representing a higher load speed  $V$ in figure 1 immediately suggests that phenomenon in the two-dimensional line load theory. The quasi-static response universally predicted by the linear theory at subcritical speeds
$V$ in figure 1 immediately suggests that phenomenon in the two-dimensional line load theory. The quasi-static response universally predicted by the linear theory at subcritical speeds  $V< c_{min}$ likewise corresponds to no intersection at all with the phase speed curve by a correspondingly lower horizontal line. (Incidentally, the phase speed and group speed curves are lowered by in-plane stress, which is associated with wave blocking – cf. Das, Sahoo & Meylan (Reference Das, Sahoo and Meylan2018).) The inclusion of anelasticity rendered the deflection pronounced but finite at the critical speed and further reduced the evolution time for the respective responses due to an impulsively started steadily moving load, while also accounting for some observed features such as the lag in the maximum depression behind the load and why the planar wave patterns may appear swept back (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996; Wang, Hosking & Milinazzo Reference Wang, Hosking and Milinazzo2004).
$V< c_{min}$ likewise corresponds to no intersection at all with the phase speed curve by a correspondingly lower horizontal line. (Incidentally, the phase speed and group speed curves are lowered by in-plane stress, which is associated with wave blocking – cf. Das, Sahoo & Meylan (Reference Das, Sahoo and Meylan2018).) The inclusion of anelasticity rendered the deflection pronounced but finite at the critical speed and further reduced the evolution time for the respective responses due to an impulsively started steadily moving load, while also accounting for some observed features such as the lag in the maximum depression behind the load and why the planar wave patterns may appear swept back (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996; Wang, Hosking & Milinazzo Reference Wang, Hosking and Milinazzo2004).

Figure 1. The two branches of the phase speed and group speed curves  $c(k)$ and
$c(k)$ and  $c_g(k)$ (which are symmetric about the origin
$c_g(k)$ (which are symmetric about the origin  $k=0$) are shown for McMurdo Sound parameters. The values
$k=0$) are shown for McMurdo Sound parameters. The values  $k_1$ and
$k_1$ and  $k_2$ where
$k_2$ where  $c=V$ are the respective wavenumbers of the trailing predominantly gravity and leading predominantly flexural components in the wave pattern previously discussed for loads moving at constant supercritical speeds
$c=V$ are the respective wavenumbers of the trailing predominantly gravity and leading predominantly flexural components in the wave pattern previously discussed for loads moving at constant supercritical speeds  $V>c_{min}$, where
$V>c_{min}$, where  $c_{min}$ denotes the minimum phase speed (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). For a steadily moving load, the large response at the critical speed corresponds to a continual accumulation of energy at the load, since
$c_{min}$ denotes the minimum phase speed (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). For a steadily moving load, the large response at the critical speed corresponds to a continual accumulation of energy at the load, since  $c_{min}$ coincides with the group speed
$c_{min}$ coincides with the group speed  $c_g$ at the corresponding critical wavenumber
$c_g$ at the corresponding critical wavenumber  $k_{min}$. The gravity wave speed
$k_{min}$. The gravity wave speed  $\sqrt {gH}$ in the limit
$\sqrt {gH}$ in the limit  $k\rightarrow 0$ defines the threshold for a shadow zone where no gravity-dominated waves arise behind the load (i.e. when
$k\rightarrow 0$ defines the threshold for a shadow zone where no gravity-dominated waves arise behind the load (i.e. when  $V>\sqrt {gH}$), and the response is quasi-static at subcritical speeds
$V>\sqrt {gH}$), and the response is quasi-static at subcritical speeds  $V< c_{min}$ (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996).
$V< c_{min}$ (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996).
The classical linear theory has mainly addressed the response of a floating ice plate to a steadily moving load or to an impulsively started steadily moving load. An exception is the contribution by Miles & Sneyd (Reference Miles and Sneyd2003), which provides the analysis for the response due to a line load moving with variable speed more thoroughly explored in this article. We initially also adopt Takizawa data in §§ 3 and 4 to re-examine and extend their calculations for impulsively started and uniformly accelerating line loads. Nonlinear theory is not pursued here, but it is notable that numerical results for the evolution of solitary waves due to a load moving over a finite time appear to show similar responses initially (cf. Guyenne & Parau Reference Guyenne and Parau2014). However, in this article we also proceed to investigate the recent prediction by Dinvay, Kalisch & Parau (Reference Dinvay, Kalisch and Parau2019) that a load decelerating from supercritical speed may trigger a remarkably large deflection as some quite early field observations suggested in Beltaos (Reference Beltaos1981), attributed to constructive interference as erstwhile trailing gravity-dominated waves catch up with the slowing load. Landing aircraft typically require approach speeds that exceed the critical speed on ice runways, and land-based vehicles may also drive at supercritical speeds on ice roads (cf. Babaei et al. Reference Babaei, van der Sanden, Short and Barrette2016; van der Sanden & Short Reference Van der Sanden and Short2017). The unsteady motion of an air-cushion vehicle and the hard landing of an aircraft on ice covers have previously been considered to some extent in Pogorelova (Reference Pogorelova2008) and Matiushina, Pogorelova & Kozin (Reference Matiushina, Pogorelova and Kozin2016). Here, we choose to investigate the catchup phenomenon in the context of simulations for the landing of Hercules transport aircraft at McMurdo Sound in the Antarctic and a Lockheed Electra aircraft accident that occurred in the Canadian Arctic.
Reference again to figure 1 provides a premonition of our detailed results, when the horizontal line shown is envisaged to move vertically for a variable load speed, sweeping upward for an accelerating load or downward for a decelerating load. An increasing load speed  $V(t)$ (where
$V(t)$ (where  $t$ denotes the time) above
$t$ denotes the time) above  $c_{min}$ may be expected to develop trailing predominantly gravity and leading predominantly flexural waves, supplementing a quasi-static form if the load speed had previously been subcritical (
$c_{min}$ may be expected to develop trailing predominantly gravity and leading predominantly flexural waves, supplementing a quasi-static form if the load speed had previously been subcritical ( $V< c_{min}$), until the trailing waves are no longer generated when
$V< c_{min}$), until the trailing waves are no longer generated when  $V>\sqrt {gH}$. Similarly, only the leading waves may be expected when a decreasing load speed exceeds the gravity wave speed
$V>\sqrt {gH}$. Similarly, only the leading waves may be expected when a decreasing load speed exceeds the gravity wave speed  $\sqrt {gH}$, but the more complete flexural-gravity wave contribution would then arise if the load enters the supercritical regime
$\sqrt {gH}$, but the more complete flexural-gravity wave contribution would then arise if the load enters the supercritical regime  $c_{min}< V<\sqrt {gH}$, followed by quasi-static contributions if it enters the subcritical regime
$c_{min}< V<\sqrt {gH}$, followed by quasi-static contributions if it enters the subcritical regime  $V< c_{min}$. Transients produced during a variable load speed phase may be expected to persist for some time, whether or not the load initially or subsequently moves steadily.
$V< c_{min}$. Transients produced during a variable load speed phase may be expected to persist for some time, whether or not the load initially or subsequently moves steadily.
2. Deflection due to a line load
As previously discussed, the simple linear two-dimensional model of Miles & Sneyd (Reference Miles and Sneyd2003) is further explored in this article. Thus the equations for the velocity potential  $\phi (x,y,t)$ in the underlying water of density
$\phi (x,y,t)$ in the underlying water of density  $\rho$ and depth
$\rho$ and depth  $H$ and the deflection
$H$ and the deflection  $\eta (x,t)$ of the floating thin elastic plate are
$\eta (x,t)$ of the floating thin elastic plate are
 $$\begin{gather} \frac{\partial^2 \phi}{\partial x^2}+\frac{\partial^2 \phi}{\partial y^2}=0 \quad (-\infty< x<\infty,-H< y<0), \end{gather}$$
$$\begin{gather} \frac{\partial^2 \phi}{\partial x^2}+\frac{\partial^2 \phi}{\partial y^2}=0 \quad (-\infty< x<\infty,-H< y<0), \end{gather}$$ $$\begin{gather}D\frac{\partial^4 \eta}{\partial x^4}+\rho g \eta=\left.-\rho\frac{\partial \phi}{\partial t}\right|_{y=0}-p(x,t), \end{gather}$$
$$\begin{gather}D\frac{\partial^4 \eta}{\partial x^4}+\rho g \eta=\left.-\rho\frac{\partial \phi}{\partial t}\right|_{y=0}-p(x,t), \end{gather}$$subject to
 \begin{equation} \left.\frac{\partial \phi}{\partial y}\right|_{y={-}H}=0,\quad\left. \frac{\partial \phi}{\partial y}\right|_{y=0}=\frac{\partial \eta}{\partial t}, \end{equation}
\begin{equation} \left.\frac{\partial \phi}{\partial y}\right|_{y={-}H}=0,\quad\left. \frac{\partial \phi}{\partial y}\right|_{y=0}=\frac{\partial \eta}{\partial t}, \end{equation}
where  $D$ is the flexural rigidity of the plate and
$D$ is the flexural rigidity of the plate and  $p(x,t)$ is the pressure exerted by the load. The plate acceleration term is ignored (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). For a line load located at
$p(x,t)$ is the pressure exerted by the load. The plate acceleration term is ignored (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). For a line load located at  $x=X(t)$ such that
$x=X(t)$ such that  $p(x,t)=p_0\delta (x-X(t))$, the one-dimensional form for the deflection obtained via Fourier–Laplace transforms may be rewritten as – cf. equation (2.13) in Miles & Sneyd (Reference Miles and Sneyd2003)
$p(x,t)=p_0\delta (x-X(t))$, the one-dimensional form for the deflection obtained via Fourier–Laplace transforms may be rewritten as – cf. equation (2.13) in Miles & Sneyd (Reference Miles and Sneyd2003)
 \begin{equation} \eta(x,t) ={-}\frac{p_0}{2{\rm \pi} \rho} \int_{-\infty}^{\infty} {\rm e}^{{\rm i}kx}\frac{\tanh(kH)}{c(k)} \left(\int_0^{t} \exp({-{\rm i}kX(\tau)})\sin[kc(k)(t-\tau)]\,{\rm d}\tau\right)\,{\rm d}k, \end{equation}
\begin{equation} \eta(x,t) ={-}\frac{p_0}{2{\rm \pi} \rho} \int_{-\infty}^{\infty} {\rm e}^{{\rm i}kx}\frac{\tanh(kH)}{c(k)} \left(\int_0^{t} \exp({-{\rm i}kX(\tau)})\sin[kc(k)(t-\tau)]\,{\rm d}\tau\right)\,{\rm d}k, \end{equation}where the appropriate positive branch of the phase speed
 \begin{equation} c(k) = \sqrt{\left(\frac{g}{k} + \frac{Dk^3}{\rho}\right)\tanh(kH)} \end{equation}
\begin{equation} c(k) = \sqrt{\left(\frac{g}{k} + \frac{Dk^3}{\rho}\right)\tanh(kH)} \end{equation}
is symmetric in the wavenumber  $k$. The time integral in (2.4) may be expressed as
$k$. The time integral in (2.4) may be expressed as
 $$\begin{gather} \frac{1}{2{\rm i}} \int_0^t \exp({-{\rm i}kX(\tau)})\left(\exp({{\rm i}kc(t-\tau)}) - \exp({-{\rm i}kc(t-\tau)})\right)\,{\rm d}\tau=\frac{1}{2{\rm i}}\left[I(c) \exp({{\rm i}kct})\right.\nonumber\\ \left. -I({-}c)\exp({-{\rm i}kct})\right], \end{gather}$$
$$\begin{gather} \frac{1}{2{\rm i}} \int_0^t \exp({-{\rm i}kX(\tau)})\left(\exp({{\rm i}kc(t-\tau)}) - \exp({-{\rm i}kc(t-\tau)})\right)\,{\rm d}\tau=\frac{1}{2{\rm i}}\left[I(c) \exp({{\rm i}kct})\right.\nonumber\\ \left. -I({-}c)\exp({-{\rm i}kct})\right], \end{gather}$$where
 \begin{equation} I(c)=\int_0^t \exp({-{\rm i}k\left[c\tau + X(\tau)\right]})\,{\rm d}\tau. \end{equation}
\begin{equation} I(c)=\int_0^t \exp({-{\rm i}k\left[c\tau + X(\tau)\right]})\,{\rm d}\tau. \end{equation}Thus adopting the real part of interest we have
 \begin{equation} \eta(x,t) ={-}\frac{p_0}{2{\rm \pi} \rho} \int_{0}^{\infty} \frac{\tanh(kH)}{c(k)} {\mathrm{Im}}\, \left[I(c)\exp({{\rm i}k(x+ct)})-I({-}c)\exp({{\rm i}k(x-ct)})\right]\,{\rm d}k, \end{equation}
\begin{equation} \eta(x,t) ={-}\frac{p_0}{2{\rm \pi} \rho} \int_{0}^{\infty} \frac{\tanh(kH)}{c(k)} {\mathrm{Im}}\, \left[I(c)\exp({{\rm i}k(x+ct)})-I({-}c)\exp({{\rm i}k(x-ct)})\right]\,{\rm d}k, \end{equation}involving the leftward propagating component
 \begin{equation} \eta_-(x,t)={-}\frac{p_0}{2{\rm \pi} \rho} \int_{0}^{\infty} \frac{\tanh(kH)}{c(k)} {\mathrm{Im}} \left[I(c)\exp({{\rm i}k(x+ct)})\right]\,{\rm d}k \end{equation}
\begin{equation} \eta_-(x,t)={-}\frac{p_0}{2{\rm \pi} \rho} \int_{0}^{\infty} \frac{\tanh(kH)}{c(k)} {\mathrm{Im}} \left[I(c)\exp({{\rm i}k(x+ct)})\right]\,{\rm d}k \end{equation}and the rightward propagating component (in the direction of the load motion)
 \begin{equation} \eta_+(x,t)=\frac{p_0}{2{\rm \pi} \rho} \int_{0}^{\infty} \frac{\tanh(kH)}{c(k)} {\mathrm{Im}} \left[I({-}c)\exp({{\rm i}k(x-ct)})\right]\,{\rm d}k. \end{equation}
\begin{equation} \eta_+(x,t)=\frac{p_0}{2{\rm \pi} \rho} \int_{0}^{\infty} \frac{\tanh(kH)}{c(k)} {\mathrm{Im}} \left[I({-}c)\exp({{\rm i}k(x-ct)})\right]\,{\rm d}k. \end{equation}3. Impulsively started steadily moving loads
In this section, we consider the evolution of responses to steadily moving line loads that are impulsively started, when implicitly no account is taken of prior loading (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996; Miles & Sneyd Reference Miles and Sneyd2003). Thus the deflection  $\eta (x,t)$ is calculated for loads that are switched on impulsively at time
$\eta (x,t)$ is calculated for loads that are switched on impulsively at time  $t=0$ and then move steadily, such that
$t=0$ and then move steadily, such that  $X(t)=Vt,\,t>0$ where
$X(t)=Vt,\,t>0$ where  $V$ is constant. We adopt Takizawa data similar to Miles & Sneyd (Reference Miles and Sneyd2003) – viz. Young's modulus
$V$ is constant. We adopt Takizawa data similar to Miles & Sneyd (Reference Miles and Sneyd2003) – viz. Young's modulus  $E = 1.79 \times 10^8$ Pa, plate thickness
$E = 1.79 \times 10^8$ Pa, plate thickness  $h=0.14$ m, Poisson ratio
$h=0.14$ m, Poisson ratio  $\nu =1/3$, water density
$\nu =1/3$, water density  $\rho =1026$ kg m
$\rho =1026$ kg m $^{-3}$ and water depth
$^{-3}$ and water depth  $H=6.80$ m. The critical speed
$H=6.80$ m. The critical speed  $c_{min}$ is a little over 5 m s
$c_{min}$ is a little over 5 m s $^{-1}$, and the gravity wave speed is
$^{-1}$, and the gravity wave speed is  $\sqrt {gH}=8.16$ m s
$\sqrt {gH}=8.16$ m s $^{-1}$. The deflections illustrated in this section are in the frame of motion of the load.
$^{-1}$. The deflections illustrated in this section are in the frame of motion of the load.
All of the results reported in this article were obtained by analytically evaluating the integral in  $t$ that appears in (2.4), and then approximating the inverse Fourier transform by a discrete inverse Fourier transform that produces a set of linear equations relating the deflection at a discrete set of spatial values to the Fourier transform of the deflection at a discrete set of wavenumber values. The fast Fourier transform was employed to solve this system of equations to obtain the deflection. In the case of impulsively started loads, the application of the discrete inverse Fourier transform is justified since the integrand in (2.4) has no poles on the real axis. When the initial condition corresponding to a steadily moving load is introduced, the modified integrand corresponding to (2.4) has poles on the real axis for values of
$t$ that appears in (2.4), and then approximating the inverse Fourier transform by a discrete inverse Fourier transform that produces a set of linear equations relating the deflection at a discrete set of spatial values to the Fourier transform of the deflection at a discrete set of wavenumber values. The fast Fourier transform was employed to solve this system of equations to obtain the deflection. In the case of impulsively started loads, the application of the discrete inverse Fourier transform is justified since the integrand in (2.4) has no poles on the real axis. When the initial condition corresponding to a steadily moving load is introduced, the modified integrand corresponding to (2.4) has poles on the real axis for values of  $k$ where
$k$ where  $V^2-c^2=0$. The part of the integrand corresponding to the initial conditions must then be modified, so that the contribution from the poles can be calculated analytically and the discrete inverse Fourier transform can be applied to approximate what remains. Appendix A provides further details.
$V^2-c^2=0$. The part of the integrand corresponding to the initial conditions must then be modified, so that the contribution from the poles can be calculated analytically and the discrete inverse Fourier transform can be applied to approximate what remains. Appendix A provides further details.
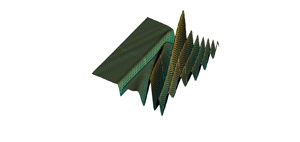
We first present mesh plots that show the evolution of the deflection in the  $(x,t)$-plane, which directly compare figures in Miles & Sneyd (Reference Miles and Sneyd2003) for two illustrative load speeds. The
$(x,t)$-plane, which directly compare figures in Miles & Sneyd (Reference Miles and Sneyd2003) for two illustrative load speeds. The  $x$-axis in metres is again placed in the immediate foreground in figures 2 and 3, but on the second horizontal axis we prefer to represent the equivalent time span in seconds. For an impulsively started load that then moves at the subcritical speed
$x$-axis in metres is again placed in the immediate foreground in figures 2 and 3, but on the second horizontal axis we prefer to represent the equivalent time span in seconds. For an impulsively started load that then moves at the subcritical speed  $V=2$ m s
$V=2$ m s $^{-1}$, we found the deflection starts to reflect the familiar quasi-static form due to the corresponding steadily moving load, as shown in figure 2, which resembles figure 1(a) of Miles & Sneyd (Reference Miles and Sneyd2003). The deflection we obtained for an impulsively started load that then moves at constant supercritical speed
$^{-1}$, we found the deflection starts to reflect the familiar quasi-static form due to the corresponding steadily moving load, as shown in figure 2, which resembles figure 1(a) of Miles & Sneyd (Reference Miles and Sneyd2003). The deflection we obtained for an impulsively started load that then moves at constant supercritical speed  $V=1.17 c_{min}$ shown in figure 3 also resembles figure 1(b) of Miles & Sneyd (Reference Miles and Sneyd2003), where characteristic leading predominantly flexural waves and trailing predominantly gravity waves appear. The longer time taken for the trailing waves to more clearly emerge is shown in figure 4. The response for a higher impulsively started constant supercritical speed
$V=1.17 c_{min}$ shown in figure 3 also resembles figure 1(b) of Miles & Sneyd (Reference Miles and Sneyd2003), where characteristic leading predominantly flexural waves and trailing predominantly gravity waves appear. The longer time taken for the trailing waves to more clearly emerge is shown in figure 4. The response for a higher impulsively started constant supercritical speed  $V=10$ m s
$V=10$ m s $^{-1} > \sqrt {gH}$ at
$^{-1} > \sqrt {gH}$ at  $t = 8$ s in figure 5 shows that the leading predominantly flexural wave is then accompanied by a trailing transient, which dissipates as the shadow zone emerges, as seen in figure 6. While each of the three different steady-state forms quickly emerge near the load, the emergence of the steady-state takes longer elsewhere – but we recognise the restricted propagation to the line of motion in the two-dimensional model is an extenuating factor. (The present context is accordingly called one-dimensional in Wang et al. (Reference Wang, Hosking and Milinazzo2004), where ‘one-dimensional’ and ‘two-dimensional’ refer to the flexural-gravity wave propagation in the floating ice plate, but in this paper we have used the now more common terminology acknowledging the additional vertical dimension.)
$t = 8$ s in figure 5 shows that the leading predominantly flexural wave is then accompanied by a trailing transient, which dissipates as the shadow zone emerges, as seen in figure 6. While each of the three different steady-state forms quickly emerge near the load, the emergence of the steady-state takes longer elsewhere – but we recognise the restricted propagation to the line of motion in the two-dimensional model is an extenuating factor. (The present context is accordingly called one-dimensional in Wang et al. (Reference Wang, Hosking and Milinazzo2004), where ‘one-dimensional’ and ‘two-dimensional’ refer to the flexural-gravity wave propagation in the floating ice plate, but in this paper we have used the now more common terminology acknowledging the additional vertical dimension.)

Figure 2. The evolution of the deflection due to an impulsively started steadily moving load at the subcritical speed  $V=2$ m s
$V=2$ m s $^{-1}$ over the first 8 s for the Takizawa data, in a direct comparison with figure 1(a) of Miles & Sneyd (Reference Miles and Sneyd2003). The familiar constant load speed quasi-static form shown in red begins to emerge as the transients propagate away.
$^{-1}$ over the first 8 s for the Takizawa data, in a direct comparison with figure 1(a) of Miles & Sneyd (Reference Miles and Sneyd2003). The familiar constant load speed quasi-static form shown in red begins to emerge as the transients propagate away.

Figure 3. The evolution of the deflection due to an impulsively started steadily moving load at the supercritical speed  $V=1.17 c_{min}$ m s
$V=1.17 c_{min}$ m s $^{-1}$ over the first 16 s for the Takizawa data, in a direct comparison with figure 1(b) of Miles & Sneyd (Reference Miles and Sneyd2003). The familiar constant load speed wave form shown in red begins to emerge as the transients propagate away.
$^{-1}$ over the first 16 s for the Takizawa data, in a direct comparison with figure 1(b) of Miles & Sneyd (Reference Miles and Sneyd2003). The familiar constant load speed wave form shown in red begins to emerge as the transients propagate away.

Figure 4. The evolution of the deflection at the impulsively started supercritical load speed  $V=1.17 c_{min}$ m s
$V=1.17 c_{min}$ m s $^{-1}$ for the Takizawa data, showing the time taken for the longer trailing predominantly gravity wave to more clearly develop.
$^{-1}$ for the Takizawa data, showing the time taken for the longer trailing predominantly gravity wave to more clearly develop.

Figure 5. The deflection for the impulsively started higher supercritical load speed  $V=10$ m s
$V=10$ m s $^{-1}$
$^{-1}$  $>\sqrt {gH}$ at 8 s for the Takizawa data. The short wavelength leading predominantly flexural wave is followed by trailing transients propagating away from the load.
$>\sqrt {gH}$ at 8 s for the Takizawa data. The short wavelength leading predominantly flexural wave is followed by trailing transients propagating away from the load.

Figure 6. The deflection for the impulsively started supercritical load speed  $V=10$ m s
$V=10$ m s $^{-1}$
$^{-1}$  $>\sqrt {gH}$ at 25, 50 and 100 s for the Takizawa data. The transients behind the load propagate away rather slowly as the shadow zone develops.
$>\sqrt {gH}$ at 25, 50 and 100 s for the Takizawa data. The transients behind the load propagate away rather slowly as the shadow zone develops.
Incidentally, to render the deflections in metres at any time  $t$, the magnitudes shown in our graphical results throughout this paper must be multiplied by the factor
$t$, the magnitudes shown in our graphical results throughout this paper must be multiplied by the factor  $p_0/(2 {\rm \pi}\rho )$ to scale in the load – e.g. the skidoo and driver in Takizawa's experiments on Lake Saroma (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). If
$p_0/(2 {\rm \pi}\rho )$ to scale in the load – e.g. the skidoo and driver in Takizawa's experiments on Lake Saroma (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). If  $|\eta | < h$ is adopted as a suitable criterion for the validity of the linearity assumption, we note that it is satisfied for the deflections shown in figures 2–6, but of course not when the deflection predicted for the steadily moving load is singular – most notably at the critical load speed
$|\eta | < h$ is adopted as a suitable criterion for the validity of the linearity assumption, we note that it is satisfied for the deflections shown in figures 2–6, but of course not when the deflection predicted for the steadily moving load is singular – most notably at the critical load speed  $V=c_{min}$, which prompted the inclusion of anelasticity and nonlinearity in the modelling (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996; Parau & Dias Reference Parau and Dias2002).
$V=c_{min}$, which prompted the inclusion of anelasticity and nonlinearity in the modelling (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996; Parau & Dias Reference Parau and Dias2002).
4. Response due to a uniformly accelerating line load
In the next two sections we consider the response due to a uniformly accelerating load following Miles & Sneyd (Reference Miles and Sneyd2003). In this section, we consider a constant acceleration from time  $t=0$ such that
$t=0$ such that  $X(t)=\frac {1}{2}At^2\; (t>0)$, while in the next section we consider constant deceleration,
$X(t)=\frac {1}{2}At^2\; (t>0)$, while in the next section we consider constant deceleration,  $(-A)$, from the initial constant speed
$(-A)$, from the initial constant speed  $V$ such that
$V$ such that  $X(t)=Vt-\frac {1}{2}At^2,\, t>0$. Since in § 5 we also compare the deflection produced by a load decelerating at a constant rate
$X(t)=Vt-\frac {1}{2}At^2,\, t>0$. Since in § 5 we also compare the deflection produced by a load decelerating at a constant rate  $A=-1$ m s
$A=-1$ m s $^{-2}$ with the deflection produced by a load initially decelerating at the constant rate
$^{-2}$ with the deflection produced by a load initially decelerating at the constant rate  $A=-1$ m s
$A=-1$ m s $^{-2}$, then decelerating at the increased constant rate
$^{-2}$, then decelerating at the increased constant rate  $A=-4$ m s
$A=-4$ m s $^{-2}$ until it comes to rest and then at rest, we find it convenient to derive the general expression obtained by breaking the interval
$^{-2}$ until it comes to rest and then at rest, we find it convenient to derive the general expression obtained by breaking the interval  $[0,t]$ into sub-intervals
$[0,t]$ into sub-intervals  $0=T_{0}< T_{1}< T_{2}\cdots < T_{J}< t$ and summing the contributions from each sub-interval such that
$0=T_{0}< T_{1}< T_{2}\cdots < T_{J}< t$ and summing the contributions from each sub-interval such that
 \begin{align} &-\frac{\tanh kH}{c} \int_{0}^{t} \exp({-{\rm i}kX(\tau)})\sin kc(t-\tau)\,{\rm d}\tau\nonumber\\ &\quad ={-}\frac{\tanh kH}{c}\sum_{n=0}^{J-1}\int_{T_{n}}^{T_{n+1}}\! \exp({-{\rm i}kX(\tau)})\sin kc(t-\tau)\,{\rm d}\tau\nonumber\\ &\qquad - \frac{\tanh kH}{c}\!\int_{T_{J}}^{t}\!\exp({-{\rm i}kX(\tau)}) \sin kc(t-\tau)\,{\rm d}\tau. \end{align}
\begin{align} &-\frac{\tanh kH}{c} \int_{0}^{t} \exp({-{\rm i}kX(\tau)})\sin kc(t-\tau)\,{\rm d}\tau\nonumber\\ &\quad ={-}\frac{\tanh kH}{c}\sum_{n=0}^{J-1}\int_{T_{n}}^{T_{n+1}}\! \exp({-{\rm i}kX(\tau)})\sin kc(t-\tau)\,{\rm d}\tau\nonumber\\ &\qquad - \frac{\tanh kH}{c}\!\int_{T_{J}}^{t}\!\exp({-{\rm i}kX(\tau)}) \sin kc(t-\tau)\,{\rm d}\tau. \end{align}
Thus when  $A_{n}$ denotes the constant acceleration or deceleration of the load in the interval
$A_{n}$ denotes the constant acceleration or deceleration of the load in the interval  $T_{n} \le t \le T_{n+1}$ and
$T_{n} \le t \le T_{n+1}$ and  $V_{n}$ denotes the speed at
$V_{n}$ denotes the speed at  $t=T_{n},$, we have that
$t=T_{n},$, we have that
 \begin{equation} -\int_{T_{n}}^{T_{n+1}}\exp({-{\rm i}kX(\tau)})\sin kc(t-\tau){\rm d}\tau \end{equation}
\begin{equation} -\int_{T_{n}}^{T_{n+1}}\exp({-{\rm i}kX(\tau)})\sin kc(t-\tau){\rm d}\tau \end{equation}is equal to
 $$\begin{gather} \frac{\exp({-{\rm i}k\left[X(T_{n})+V_{n}(t-T_{n})\right]})}{2k} \left[\frac{\exp({ {\rm i}k(c+V_{n})(T_{n+1}-T_{{n}})})-1}{c+V_{n}}\right.\nonumber\\ \left. +\frac{\exp({-{\rm i}k(c-V_{n})(T_{n+1}-T_{n})})-1}{c-V_{n}}\right] \end{gather}$$
$$\begin{gather} \frac{\exp({-{\rm i}k\left[X(T_{n})+V_{n}(t-T_{n})\right]})}{2k} \left[\frac{\exp({ {\rm i}k(c+V_{n})(T_{n+1}-T_{{n}})})-1}{c+V_{n}}\right.\nonumber\\ \left. +\frac{\exp({-{\rm i}k(c-V_{n})(T_{n+1}-T_{n})})-1}{c-V_{n}}\right] \end{gather}$$for a load moving at a constant speed and
 $$\begin{gather} {\rm i}\frac{\exp({-{\rm i}kX(T_{n})})}{2} \left[\exp({{\rm i}kc(t-T_{n})})I_{n}(T_{n+1}-T_{n},c)\right.\nonumber\\ \left.-\exp({-{\rm i}kc(t-T_{n})})I_{n}(T_{n+1}-T_{n},-c)\right] \end{gather}$$
$$\begin{gather} {\rm i}\frac{\exp({-{\rm i}kX(T_{n})})}{2} \left[\exp({{\rm i}kc(t-T_{n})})I_{n}(T_{n+1}-T_{n},c)\right.\nonumber\\ \left.-\exp({-{\rm i}kc(t-T_{n})})I_{n}(T_{n+1}-T_{n},-c)\right] \end{gather}$$
for an accelerating load where  $\gamma _{n}^{2}={k A_{n} }/{2}$,
$\gamma _{n}^{2}={k A_{n} }/{2}$,  $\alpha _{n}=(c+V_{n})/\!{ A_{n}}$,
$\alpha _{n}=(c+V_{n})/\!{ A_{n}}$,
 \begin{equation} I_{n}(t,c)=\frac{\exp({{\rm i}\gamma_{n}^{2}\alpha_{n}^{2}})}{\gamma_{n}} [{\mathcal{F}}^{{\ast}}(\gamma_{n}(t+\alpha_{n})-{\mathcal{F}}^{{\ast}}(\gamma_{n}\alpha_{n})], \end{equation}
\begin{equation} I_{n}(t,c)=\frac{\exp({{\rm i}\gamma_{n}^{2}\alpha_{n}^{2}})}{\gamma_{n}} [{\mathcal{F}}^{{\ast}}(\gamma_{n}(t+\alpha_{n})-{\mathcal{F}}^{{\ast}}(\gamma_{n}\alpha_{n})], \end{equation}and
 \begin{equation} {\mathcal{F}}(z) = \int_0^z {\rm e}^{{\rm i}s^2}\,{\rm d}s = \sqrt{\frac{\rm \pi}{2}} C\left(\sqrt{\frac{2}{\rm \pi}}z\right) + {\rm i} \sqrt{\frac{\rm \pi}{2}} S\left(\sqrt{\frac{2}{\rm \pi}}z\right) \end{equation}
\begin{equation} {\mathcal{F}}(z) = \int_0^z {\rm e}^{{\rm i}s^2}\,{\rm d}s = \sqrt{\frac{\rm \pi}{2}} C\left(\sqrt{\frac{2}{\rm \pi}}z\right) + {\rm i} \sqrt{\frac{\rm \pi}{2}} S\left(\sqrt{\frac{2}{\rm \pi}}z\right) \end{equation}is the Fresnel integral.
The solution of (2.8) may then be expressed in terms of  $I_n(t,c)$. Thus taking
$I_n(t,c)$. Thus taking  $J=0$,
$J=0$,  $T_0=0$,
$T_0=0$,  $V_0=0$,
$V_0=0$,  $A_0=A$,
$A_0=A$,  $\gamma _0^2=kA/2$ and
$\gamma _0^2=kA/2$ and  $\alpha _{0}=c/A$, the leftward and rightward propagating terms in (2.8) are
$\alpha _{0}=c/A$, the leftward and rightward propagating terms in (2.8) are
 \begin{equation} I(c)\exp({{\rm i}k(x+ct)})=I_0(t,c)\exp({{\rm i}k(x+ct)}), \end{equation}
\begin{equation} I(c)\exp({{\rm i}k(x+ct)})=I_0(t,c)\exp({{\rm i}k(x+ct)}), \end{equation}and
 \begin{equation} I({-}c)\exp({{\rm i}k(x-ct)})=I_0(t,-c)\exp({{\rm i}k(x-ct)}), \end{equation}
\begin{equation} I({-}c)\exp({{\rm i}k(x-ct)})=I_0(t,-c)\exp({{\rm i}k(x-ct)}), \end{equation}respectively.
Figures 7–9 depict deflection snapshots we found for an impulsively started uniformly accelerating load using the Takizawa data in each of the three regimes  $V>\sqrt {gH}, \,c_{min}< V<\sqrt {gH}$ and
$V>\sqrt {gH}, \,c_{min}< V<\sqrt {gH}$ and  $V< c_{min}$, illustrating successive contributions as anticipated for a time-dependent load speed at the end of § 1. Thus the early quasi-static form in figure 7 is supplemented by supercritical contributions when the load accelerates beyond the critical speed
$V< c_{min}$, illustrating successive contributions as anticipated for a time-dependent load speed at the end of § 1. Thus the early quasi-static form in figure 7 is supplemented by supercritical contributions when the load accelerates beyond the critical speed  $c_{min}$ (cf. figure 8) and then the gravity wave speed
$c_{min}$ (cf. figure 8) and then the gravity wave speed  $\sqrt {gH}$ (cf. figure 9). The position of the load as seen by a stationary observer is here and henceforth denoted by a red or blue arrow, showing that the maximum amplitude of the deflection tends to fall further behind the load as the load speed increases. The very high constant acceleration
$\sqrt {gH}$ (cf. figure 9). The position of the load as seen by a stationary observer is here and henceforth denoted by a red or blue arrow, showing that the maximum amplitude of the deflection tends to fall further behind the load as the load speed increases. The very high constant acceleration  $A=14$ m s
$A=14$ m s $^{-2}$ assumed in figures 7–9 was chosen to reconsider the calculation in Miles & Sneyd (Reference Miles and Sneyd2003). A more likely practical value
$^{-2}$ assumed in figures 7–9 was chosen to reconsider the calculation in Miles & Sneyd (Reference Miles and Sneyd2003). A more likely practical value  $A=1$ m s
$A=1$ m s $^{-2}$ was chosen to re-calculate the response at the load speed
$^{-2}$ was chosen to re-calculate the response at the load speed  $V=9.8$ m s
$V=9.8$ m s $^{-1}$ as shown in figure 10, but now with the relevant initial static response included (blue plot) for comparison with the response due to the impulsively started load (red plot). This confirms that the response is largely determined by the acceleration, with similar larger dominant deflection amplitudes and somewhat different transients behind the load. The validity of the linearity criterion
$^{-1}$ as shown in figure 10, but now with the relevant initial static response included (blue plot) for comparison with the response due to the impulsively started load (red plot). This confirms that the response is largely determined by the acceleration, with similar larger dominant deflection amplitudes and somewhat different transients behind the load. The validity of the linearity criterion  $|\eta | < h$ has become less clear, however, with nonlinear theory expected to be required at later times or for heavier loads than in Takizawa's experiments (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). We also found there is no singularity in the deflection due to the uniformly accelerating load, but could not reproduce figure 1(c) of Miles & Sneyd (Reference Miles and Sneyd2003).
$|\eta | < h$ has become less clear, however, with nonlinear theory expected to be required at later times or for heavier loads than in Takizawa's experiments (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). We also found there is no singularity in the deflection due to the uniformly accelerating load, but could not reproduce figure 1(c) of Miles & Sneyd (Reference Miles and Sneyd2003).

Figure 7. Subcritical response at  $V=0.7$ m s
$V=0.7$ m s $^{-1}< c_{min}$ for the impulsively started load uniformly accelerating from
$^{-1}< c_{min}$ for the impulsively started load uniformly accelerating from  $t=0$ using the Takizawa data, with a small central quasi-static feature amid leading and trailing transients.
$t=0$ using the Takizawa data, with a small central quasi-static feature amid leading and trailing transients.

Figure 8. The supercritical response when  $c_{min}< V=5.6$ m s
$c_{min}< V=5.6$ m s $^{-1}<\sqrt {gH}$ for the impulsively started load uniformly accelerating from
$^{-1}<\sqrt {gH}$ for the impulsively started load uniformly accelerating from  $t=0$ using the Takizawa data, with large emerging amplitudes in the neighbourhood of the load amid persistent transients.
$t=0$ using the Takizawa data, with large emerging amplitudes in the neighbourhood of the load amid persistent transients.

Figure 9. Supercritical response when  $V=9.8$ m s
$V=9.8$ m s $^{-1}>\sqrt {gH}$ for the impulsively started load uniformly accelerating from
$^{-1}>\sqrt {gH}$ for the impulsively started load uniformly accelerating from  $t=0$ using the Takizawa data, showing an advancing load with further enhanced leading and trailing deflections. There are even larger leading wave amplitudes, and more enlarged amplitudes trailing the load where it appears the transients persist.
$t=0$ using the Takizawa data, showing an advancing load with further enhanced leading and trailing deflections. There are even larger leading wave amplitudes, and more enlarged amplitudes trailing the load where it appears the transients persist.

Figure 10. The supercritical response when  $V=9.8$ m s
$V=9.8$ m s $^{-1}>\sqrt {gH}$ for the uniformly accelerating load using the Takizawa data, when the initial static response at rest is included (blue plot) and impulsively started (red plot) for confirmation that the response is determined by the acceleration. The advancing load is associated with further enlarged leading and trailing deflections, and even more persistent transients.
$^{-1}>\sqrt {gH}$ for the uniformly accelerating load using the Takizawa data, when the initial static response at rest is included (blue plot) and impulsively started (red plot) for confirmation that the response is determined by the acceleration. The advancing load is associated with further enlarged leading and trailing deflections, and even more persistent transients.
5. Response due to a uniformly decelerating line load
We now proceed to determine the deflection produced by the load deceleration  $(-A)$ from the initial constant speed
$(-A)$ from the initial constant speed  $V$ such that
$V$ such that  $X(t)=Vt-\frac {1}{2}At^2,\, t>0$. In this case, taking
$X(t)=Vt-\frac {1}{2}At^2,\, t>0$. In this case, taking  $J=0$,
$J=0$,  $T_0=0$,
$T_0=0$,  $V_0=V$,
$V_0=V$,  $A_0=-A$,
$A_0=-A$,  $\gamma _0^2=kA_0/2$ and
$\gamma _0^2=kA_0/2$ and  $\alpha _0=(V+c)/A_0$, the leftward and rightward propagating terms in (2.8) are
$\alpha _0=(V+c)/A_0$, the leftward and rightward propagating terms in (2.8) are
 \begin{equation} I(c)\exp({{\rm i}k(x+ct)})=I_0(t,c)\exp({{\rm i}k(x+ct)}), \end{equation}
\begin{equation} I(c)\exp({{\rm i}k(x+ct)})=I_0(t,c)\exp({{\rm i}k(x+ct)}), \end{equation}and
 \begin{equation} I({-}c)\exp({{\rm i}k(x-ct)})=I_0(t,-c)\exp({{\rm i}k(x-ct)}), \end{equation}
\begin{equation} I({-}c)\exp({{\rm i}k(x-ct)})=I_0(t,-c)\exp({{\rm i}k(x-ct)}), \end{equation}respectively.
We first reconsidered the subcritical regime, and in particular the case of a load initially moving steadily at  $0.4 \,c_{min}$ that is subjected to a constant deceleration to rest in
$0.4 \,c_{min}$ that is subjected to a constant deceleration to rest in  $37.75$ s using the Takizawa data. As the snapshot at any arbitrary intervening time such as in figure 11 shows, the initial quasi-static form essentially moves with the load (its position again denoted by the red arrow), as the transient contributions from the deceleration and initial condition propagate away. This appears to be consistent with the response illustrated in figure 1(d) of Miles & Sneyd (Reference Miles and Sneyd2003). We again show the impulsively started case for comparison, together with the evolution of the initial condition for completeness – cf. the first term of the Fourier transform (A 2) for the deflection in Appendix A.
$37.75$ s using the Takizawa data. As the snapshot at any arbitrary intervening time such as in figure 11 shows, the initial quasi-static form essentially moves with the load (its position again denoted by the red arrow), as the transient contributions from the deceleration and initial condition propagate away. This appears to be consistent with the response illustrated in figure 1(d) of Miles & Sneyd (Reference Miles and Sneyd2003). We again show the impulsively started case for comparison, together with the evolution of the initial condition for completeness – cf. the first term of the Fourier transform (A 2) for the deflection in Appendix A.

Figure 11. Snapshot at an arbitrary intervening time for a subcritical decelerating load using the Takizawa data, showing the initial quasi-static form moving with the load as the transient contributions from the deceleration and initial condition propagate away.
For the slightly different Lake Saroma data in table 1 of Dinvay et al. (Reference Dinvay, Kalisch and Parau2019), we found evolving surface and strain profiles for a 235 kg load decelerating from the steady state at the initial constant speed  $V=10$ m s
$V=10$ m s $^{-1}$ to rest, as shown in figure 12, which resembles their figure 11(b,d, f), except that the predicted deflection and strain are larger as one would expect in the simple line load model without dissipation. The strain was calculated to be
$^{-1}$ to rest, as shown in figure 12, which resembles their figure 11(b,d, f), except that the predicted deflection and strain are larger as one would expect in the simple line load model without dissipation. The strain was calculated to be  $\epsilon =(h/2)\, \partial ^2 \eta /\partial x^2$ as in Dinvay et al. (Reference Dinvay, Kalisch and Parau2019), and in passing we observe that the linearity criterion
$\epsilon =(h/2)\, \partial ^2 \eta /\partial x^2$ as in Dinvay et al. (Reference Dinvay, Kalisch and Parau2019), and in passing we observe that the linearity criterion  $|\eta | < h$ is challenged but still satisfied. We then chose to further pursue the response for loads decelerating from supercritical speeds, in cases where constructive interference due to the catch up of predominantly gravity waves can reinforce the response. In particular, the results obtained for Hercules aircraft landing at McMurdo Sound and the Lockheed Electra aircraft accident in the Canadian Arctic are now discussed.
$|\eta | < h$ is challenged but still satisfied. We then chose to further pursue the response for loads decelerating from supercritical speeds, in cases where constructive interference due to the catch up of predominantly gravity waves can reinforce the response. In particular, the results obtained for Hercules aircraft landing at McMurdo Sound and the Lockheed Electra aircraft accident in the Canadian Arctic are now discussed.

Figure 12. Evolving surface and strain profiles for a 235 kg load decelerating from the steady state at the initial constant speed  $V=10$ m s
$V=10$ m s $^{-1}$ to rest, using the Takizawa data in Dinvay et al. (Reference Dinvay, Kalisch and Parau2019) for direct comparison with their figure 11. The measurement location is at 200 m, and the load comes to rest after 50 s.
$^{-1}$ to rest, using the Takizawa data in Dinvay et al. (Reference Dinvay, Kalisch and Parau2019) for direct comparison with their figure 11. The measurement location is at 200 m, and the load comes to rest after 50 s.
On assuming an initial supercritical load speed in landing within the wavenumber interval  $(k_1, k_2)$ identified in figure 1, we have: (i)
$(k_1, k_2)$ identified in figure 1, we have: (i)  $\gamma$ ranging from
$\gamma$ ranging from  $\sqrt {\frac {1}{2}k_1 A}$ to
$\sqrt {\frac {1}{2}k_1 A}$ to  $\sqrt {\frac {1}{2}k_2 A}\;$ and (ii)
$\sqrt {\frac {1}{2}k_2 A}\;$ and (ii)  $(V-c)/A$ ranging from zero to a maximum
$(V-c)/A$ ranging from zero to a maximum  $(V-c_{min})/A$ and back to zero. The recommended runway length for the Hercules aircraft is approximately 1500 m, so an average deceleration
$(V-c_{min})/A$ and back to zero. The recommended runway length for the Hercules aircraft is approximately 1500 m, so an average deceleration  $A$ would be at least 1 m s
$A$ would be at least 1 m s $^{-2}$ over a landing time of approximately a minute for a steady landing approach speed
$^{-2}$ over a landing time of approximately a minute for a steady landing approach speed  $V$ of 120 knots or so (approximately
$V$ of 120 knots or so (approximately  $60$ m s
$60$ m s $^{-1}$) as is typically recommended to pilots. This approach speed is just above the long wavelength gravity wave speed
$^{-1}$) as is typically recommended to pilots. This approach speed is just above the long wavelength gravity wave speed  $\sqrt {gH} \simeq 58.6$ m s
$\sqrt {gH} \simeq 58.6$ m s $^{-1}$ (in the limit
$^{-1}$ (in the limit  $k\rightarrow 0$) shown in figure 1, when there are no trailing predominantly gravity waves supplementing the shorter wavelength leading waves before the load decelerates below
$k\rightarrow 0$) shown in figure 1, when there are no trailing predominantly gravity waves supplementing the shorter wavelength leading waves before the load decelerates below  $\sqrt {gH}$, until entering the subcritical regime below the critical load speed
$\sqrt {gH}$, until entering the subcritical regime below the critical load speed  $c_{min}\simeq 22.5$ m s
$c_{min}\simeq 22.5$ m s $^{-1}$ at wavenumber
$^{-1}$ at wavenumber  $k_{min} \simeq 2\times 10^{-2}$ m
$k_{min} \simeq 2\times 10^{-2}$ m $^{-1}$ where the response contribution becomes quasi-static. We adopted the parameters of Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996), where the Young's modulus
$^{-1}$ where the response contribution becomes quasi-static. We adopted the parameters of Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996), where the Young's modulus  $E=5 \times 10^{9}$ Pa and the sea ice thickness
$E=5 \times 10^{9}$ Pa and the sea ice thickness  $h=2.5$ m. As previously indicated, for a time-dependent load speed the representative horizontal line in figure 1 may be envisaged to sweep down through each of the three regimes
$h=2.5$ m. As previously indicated, for a time-dependent load speed the representative horizontal line in figure 1 may be envisaged to sweep down through each of the three regimes  $V>\sqrt {gH}, \,c_{min}< V<\sqrt {gH}$ and
$V>\sqrt {gH}, \,c_{min}< V<\sqrt {gH}$ and  $V< c_{min}$.
$V< c_{min}$.
Let us first ignore the steady-state deflection from a constant supercritical approach speed  $V=60$ m s
$V=60$ m s $^{-1}$, and consider a constant deceleration
$^{-1}$, and consider a constant deceleration  $A=-1$ m s
$A=-1$ m s $^{-2}$ until the load comes to rest after
$^{-2}$ until the load comes to rest after  $t=60$ s – i.e. from
$t=60$ s – i.e. from  $V=60$ m s
$V=60$ m s $^{-1}$ just above the gravity wave speed
$^{-1}$ just above the gravity wave speed  $\sqrt {gH} \simeq 58.6$ m s
$\sqrt {gH} \simeq 58.6$ m s $^{-1}$ for the assumed water depth
$^{-1}$ for the assumed water depth  $H=350$ m, encompassing all three response regimes during the deceleration. Then, as shown in figure 13 for the McMurdo Sound parameters, we find that the early predominantly flexural contribution generated ahead of the decelerating load persists but its amplitude is soon exceeded near the load, attributed to the predominantly gravity waves generated behind continually catching up. It is also notable that there is no singularity in the predicted evolving deflection for the uniformly decelerating load.
$H=350$ m, encompassing all three response regimes during the deceleration. Then, as shown in figure 13 for the McMurdo Sound parameters, we find that the early predominantly flexural contribution generated ahead of the decelerating load persists but its amplitude is soon exceeded near the load, attributed to the predominantly gravity waves generated behind continually catching up. It is also notable that there is no singularity in the predicted evolving deflection for the uniformly decelerating load.

Figure 13. Deflection evolution for an impulsively started load subject to constant load deceleration  $1$ m s
$1$ m s $^{-2}$ to rest from a hypothetical initial speed of
$^{-2}$ to rest from a hypothetical initial speed of  $60$ m s
$60$ m s $^{-1}$, in the McMurdo Sound context. The successive snapshot times shown here are
$^{-1}$, in the McMurdo Sound context. The successive snapshot times shown here are  $t=17.93, 29.88, 41,83, 47.81, 53.79, 59.76$ s. The leading predominantly flexural wave stays ahead of the load, but the trailing predominantly gravity wave appears to catch up and reinforce the deflection near the load location denoted by the red arrow.
$t=17.93, 29.88, 41,83, 47.81, 53.79, 59.76$ s. The leading predominantly flexural wave stays ahead of the load, but the trailing predominantly gravity wave appears to catch up and reinforce the deflection near the load location denoted by the red arrow.
Let us now introduce the initial steady-state deflection in the underlying ice runway calculated at the lower constant aircraft speed  $V=50$ m s
$V=50$ m s $^{-1}<\sqrt {gH}$ previously considered in Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996), as shown in figure 14. This slower aircraft speed is just above the recognised safety minimum for touchdown. A representative response during a continual constant deceleration
$^{-1}<\sqrt {gH}$ previously considered in Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996), as shown in figure 14. This slower aircraft speed is just above the recognised safety minimum for touchdown. A representative response during a continual constant deceleration  $A=-1$ m s
$A=-1$ m s $^{-2}$ is shown in figure 15, where a substantial reinforcement is apparent. Thus, although the early deceleration effect over the load speed interval
$^{-2}$ is shown in figure 15, where a substantial reinforcement is apparent. Thus, although the early deceleration effect over the load speed interval  $\sqrt {gH}< V<50$ m s
$\sqrt {gH}< V<50$ m s $^{-1}$ is avoided, the subsequent response in figure 15 not only reflects the initial supercritical speed steady-state deflection in figure 14 but also a large response at the load, attributed to catchup of the trailing predominantly gravity wave produced by the deceleration effect over the range
$^{-1}$ is avoided, the subsequent response in figure 15 not only reflects the initial supercritical speed steady-state deflection in figure 14 but also a large response at the load, attributed to catchup of the trailing predominantly gravity wave produced by the deceleration effect over the range  $50$ m s
$50$ m s $^{-1}< V< c_{min}$.
$^{-1}< V< c_{min}$.

Figure 14. Steady-state deflection in the McMurdo Sound ice cover of thickness 2.5 m for the constant supercritical approach speed  $50$ m s
$50$ m s $^{-1}$ assumed in Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996).
$^{-1}$ assumed in Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996).

Figure 15. Localised reinforced response at the load denoted by the red arrow, attributed to catchup of the trailing predominantly gravity waves during constant deceleration  $A=-1$ m s
$A=-1$ m s $^{-2}$ to the load speed
$^{-2}$ to the load speed  $V=6$ m s
$V=6$ m s $^{-1}$ from the constant Hercules approach speed
$^{-1}$ from the constant Hercules approach speed  $V=50$ m s
$V=50$ m s $^{-1}$ at McMurdo Sound previously considered by Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996). Both the steady-state and impulsive starts are shown for comparison, together with the evolution of the initial condition.
$^{-1}$ at McMurdo Sound previously considered by Davys et al. in Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996). Both the steady-state and impulsive starts are shown for comparison, together with the evolution of the initial condition.
The trailing predominantly gravity wave is avoided in the initial steady state at the recommended higher approach speed of approximately  $60$ m s
$60$ m s $^{-1}$ above
$^{-1}$ above  ${>}\sqrt{gH}$. Moreover, a pilot may apply reverse thrust retardation between
${>}\sqrt{gH}$. Moreover, a pilot may apply reverse thrust retardation between  $80$ and
$80$ and  $60$ knots (between
$60$ knots (between  $40$ and
$40$ and  $30$ m s
$30$ m s $^{-1}$ say) that can quite quickly lead to subcritical load speeds
$^{-1}$ say) that can quite quickly lead to subcritical load speeds  $V< c_{min}$, largely avoiding much of the predominantly gravity wave generation over the load speed range
$V< c_{min}$, largely avoiding much of the predominantly gravity wave generation over the load speed range  $40$ m s
$40$ m s $^{-1}< V< c_{min}=22.5$ m s
$^{-1}< V< c_{min}=22.5$ m s $^{-1}$ that would otherwise accrue in the absence of the reverse thrust. For illustration, the response for the case when the load is decelerated at
$^{-1}$ that would otherwise accrue in the absence of the reverse thrust. For illustration, the response for the case when the load is decelerated at  $A=-1$ m s
$A=-1$ m s $^{-2}$ from the approach speed
$^{-2}$ from the approach speed  $V=60$ m s
$V=60$ m s $^{-1}$ until
$^{-1}$ until  $V=40$ m s
$V=40$ m s $^{-1}$ and then at
$^{-1}$ and then at  $A=-4$ m s
$A=-4$ m s $^{-2}$ to subcritical speed in less than
$^{-2}$ to subcritical speed in less than  $5$ s is compared in figure 16 with the case of constant deceleration at
$5$ s is compared in figure 16 with the case of constant deceleration at  $A=-1$ m s
$A=-1$ m s $^{-2}$. Thus, whereas panel (a) and to some extent (b) in figure 13 may represent the deflection due to the common earlier deceleration at
$^{-2}$. Thus, whereas panel (a) and to some extent (b) in figure 13 may represent the deflection due to the common earlier deceleration at  $A=-1$ m s
$A=-1$ m s $^{-2}$ from the landing speed of
$^{-2}$ from the landing speed of  $V=60$ m s
$V=60$ m s $^{-1}$ to
$^{-1}$ to  $V=40$ m s
$V=40$ m s $^{-1}$ in each case, the reinforcement at later times suggested by the other
$^{-1}$ in each case, the reinforcement at later times suggested by the other  $4$ panels in figure 13 may largely be avoided when the reverse thrust is activated. Figure 16(c–f) shows the deflection for the reverse thrust case (load position denoted by the blue arrow) increasingly resembles the subcritical quasi-static form whereas the constant deceleration case (load position denoted by the red arrow) also reflects the longer supercritical exposure involved, and the magnitudes are notably less than the reinforced deflection for the case of constant deceleration from the lower approach speed
$4$ panels in figure 13 may largely be avoided when the reverse thrust is activated. Figure 16(c–f) shows the deflection for the reverse thrust case (load position denoted by the blue arrow) increasingly resembles the subcritical quasi-static form whereas the constant deceleration case (load position denoted by the red arrow) also reflects the longer supercritical exposure involved, and the magnitudes are notably less than the reinforced deflection for the case of constant deceleration from the lower approach speed  $V=50$ m s
$V=50$ m s $^{-1}$ shown in figure 15. Bearing in mind the known weight and dimensions of the Hercules aircraft, on introducing the
$^{-1}$ shown in figure 15. Bearing in mind the known weight and dimensions of the Hercules aircraft, on introducing the  $p_0/(2 {\rm \pi}\rho )$ factor it appears that the deflection on the thick ice at McMurdo Sound can typically be a few centimetres over a hundred metres or more, which should be measurable but hardly dangerous. The flexural-gravity waves generated were of course originally detected several kilometres away from where the Hercules aircraft were landing by John Davys and colleagues from the University of Waikato (New Zealand), which prompted many of the theoretical advances discussed in chapter 5 of Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996).
$p_0/(2 {\rm \pi}\rho )$ factor it appears that the deflection on the thick ice at McMurdo Sound can typically be a few centimetres over a hundred metres or more, which should be measurable but hardly dangerous. The flexural-gravity waves generated were of course originally detected several kilometres away from where the Hercules aircraft were landing by John Davys and colleagues from the University of Waikato (New Zealand), which prompted many of the theoretical advances discussed in chapter 5 of Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996).

Figure 16. Response due to deceleration at  $A=-1$ m s
$A=-1$ m s $^{-2}$ from the steady-state deflection, at the recommended higher Hercules approach speed
$^{-2}$ from the steady-state deflection, at the recommended higher Hercules approach speed  $V=60$ m s
$V=60$ m s $^{-1}$ until the load speed
$^{-1}$ until the load speed  $V=40$ m s
$V=40$ m s $^{-1}$, and then the increased deceleration
$^{-1}$, and then the increased deceleration  $A=-4$ m s
$A=-4$ m s $^{-2}$ due to pilot activation of reverse thrust – cf. the load location denoted by the blue arrow, already distinct in panel (b) from the load under constant deceleration
$^{-2}$ due to pilot activation of reverse thrust – cf. the load location denoted by the blue arrow, already distinct in panel (b) from the load under constant deceleration  $A=-1$ m s
$A=-1$ m s $^{-2}$ denoted by the red arrow. The trailing predominantly gravity wave from
$^{-2}$ denoted by the red arrow. The trailing predominantly gravity wave from  $V=58.6$ m s
$V=58.6$ m s $^{-1} =\sqrt {gH}$ is evident in panel (b) for both cases; but in panels (c–f) the quasi-static form generated when
$^{-1} =\sqrt {gH}$ is evident in panel (b) for both cases; but in panels (c–f) the quasi-static form generated when  $V< c_{min}=22.5$ m s
$V< c_{min}=22.5$ m s $^{-1}$ features more in the reverse thrust case than the flexural-gravity wave over the interval
$^{-1}$ features more in the reverse thrust case than the flexural-gravity wave over the interval  $c_{min}< V<\sqrt {gH}$.
$c_{min}< V<\sqrt {gH}$.
The aircraft accident off Rea Point on Melville Island in the Canadian Arctic was drawn to our attention long ago (cf. Wadhams Reference Wadhams1997), and recently we ascertained the actual circumstances that were eventually well documented in Stevenson (Reference Stevenson1976). In 1974 a Lockheed Electra L-188 Aircraft flight with 30 passengers and 4 crew mistakenly put down onto sea ice some miles short of the intended land runway, when the cargo and cockpit broke away from the remainder of the fuselage and continued together along the ice surface for some 900 feet (274 m). Only the co-pilot and flight engineer survived, after getting out onto the ice from the cockpit before it sank completely and they were rescued by searchers from the operating company's Rea Point base. The ground speed of the aircraft before it came down was reported to be  $120$ knots (cf. Stevenson Reference Stevenson1976), which is well into the high supercritical regime
$120$ knots (cf. Stevenson Reference Stevenson1976), which is well into the high supercritical regime  $V>\sqrt {gH}$ for an assumed water depth of
$V>\sqrt {gH}$ for an assumed water depth of  $100$ m say. Thus if we take the initial speed to be
$100$ m say. Thus if we take the initial speed to be  $63$ m s
$63$ m s $^{-1}$ and again assume constant deceleration over the reported
$^{-1}$ and again assume constant deceleration over the reported  $900$ feet trajectory to rest on the ice, that corresponds to
$900$ feet trajectory to rest on the ice, that corresponds to  $A=7$ m s
$A=7$ m s $^{-2}$ over some
$^{-2}$ over some  $9$ s.
$9$ s.
We again adopt Young's modulus  $E=5 \times 10^{9}$ Pa, an estimated new season ice thickness
$E=5 \times 10^{9}$ Pa, an estimated new season ice thickness  $h=0.5$ m and water depth
$h=0.5$ m and water depth  $H=100$ m. The initial steady-state deflection is first shown in figure 17, with the characteristic leading predominantly flexural wave and shadow zone at the load speed
$H=100$ m. The initial steady-state deflection is first shown in figure 17, with the characteristic leading predominantly flexural wave and shadow zone at the load speed  $63$ m s
$63$ m s $^{-1}$ considerably above the gravity wave speed
$^{-1}$ considerably above the gravity wave speed  $\sqrt {gH}=31.3$ m s
$\sqrt {gH}=31.3$ m s $^{-1}$ for the assumed water depth of
$^{-1}$ for the assumed water depth of  $100$ m in this context. We obtained the evolution of the ice response shown in figure 18, assuming the aircraft approach speed of
$100$ m in this context. We obtained the evolution of the ice response shown in figure 18, assuming the aircraft approach speed of  $63$ m s
$63$ m s $^{-1}$ and the constant deceleration of
$^{-1}$ and the constant deceleration of  $7$ m s
$7$ m s $^{-2}$ over the trajectory of the cockpit and cargo on the ice. The first panel of figure 19 corresponds to the final panel in figure 18 at the time the load (cockpit and crew) comes to rest, to more clearly illustrate the antisymmetry in the deflection over an interval of
$^{-2}$ over the trajectory of the cockpit and cargo on the ice. The first panel of figure 19 corresponds to the final panel in figure 18 at the time the load (cockpit and crew) comes to rest, to more clearly illustrate the antisymmetry in the deflection over an interval of  $20$ m or so near the load. Assuming that the load (cockpit and crew) was at least
$20$ m or so near the load. Assuming that the load (cockpit and crew) was at least  $2000$ kg, as shown in figure 19 the maximum deflection is several centimetres and the strain is of order
$2000$ kg, as shown in figure 19 the maximum deflection is several centimetres and the strain is of order  $10^{-4}$. We note that the strain maximum coincides with the load at rest, and that it approaches the value
$10^{-4}$. We note that the strain maximum coincides with the load at rest, and that it approaches the value  $2.14 \times 10^{-4}$ indicated in Goodman, Wadhams & Squire (Reference Goodman, Wadhams and Squire1980) when the ice is most likely to fracture. Thus the constructive interference due to the predominantly gravity wave catching up may indeed account for the reported rapid sinking of the cockpit as it came to rest on the ice.
$2.14 \times 10^{-4}$ indicated in Goodman, Wadhams & Squire (Reference Goodman, Wadhams and Squire1980) when the ice is most likely to fracture. Thus the constructive interference due to the predominantly gravity wave catching up may indeed account for the reported rapid sinking of the cockpit as it came to rest on the ice.

Figure 17. Steady-state deflection at the reported initial ground speed  $63$ m s
$63$ m s $^{-1}$ before the Rea Point crash.
$^{-1}$ before the Rea Point crash.

Figure 18. Deflection evolution in the Lockheed Electra crash on the sea ice off Rea Point for a constant deceleration of  $7$ m s
$7$ m s $^{-2}$ to rest at the end of the
$^{-2}$ to rest at the end of the  $900$ feet trajectory on the ice, from the steady state at the reported aircraft approach ground speed of
$900$ feet trajectory on the ice, from the steady state at the reported aircraft approach ground speed of  $63$ m s
$63$ m s $^{-1}$ (blue curve). The red dashed curve shows the deflection has additional trailing transients when the initial steady state is ignored.
$^{-1}$ (blue curve). The red dashed curve shows the deflection has additional trailing transients when the initial steady state is ignored.

Figure 19. The ice deflection in metres and associated strain in the Lockheed Electra crash off Rea Point when the initial steady-state deflection at the reported aircraft approach ground speed of  $63$ m s
$63$ m s $^{-1}$ is included, assuming a constant deceleration of
$^{-1}$ is included, assuming a constant deceleration of  $7$ m s
$7$ m s $^{-2}$ until the load (cockpit and crew) came to rest at the end of the
$^{-2}$ until the load (cockpit and crew) came to rest at the end of the  $900$ feet trajectory on the ice. The blue dashed curve shows the deflection has additional trailing transients when the initial steady state is ignored.
$900$ feet trajectory on the ice. The blue dashed curve shows the deflection has additional trailing transients when the initial steady state is ignored.
6. Conclusion
We have reconsidered the two-dimensional model for a line load moving at variable load speed on a floating ice plate, originally published in Miles & Sneyd (Reference Miles and Sneyd2003). Firstly, our calculations clarify and extend their results for an impulsively started steadily moving load using the Takizawa data, showing more completely how the responses due to a steadily moving line load on a floating ice sheet evolve in all three regimes  $V>\sqrt {gH}$,
$V>\sqrt {gH}$,  $\,c_{min}< V<\sqrt {gH}$ and
$\,c_{min}< V<\sqrt {gH}$ and  $V< c_{min}$ (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). The deflection due to a uniformly accelerating line load was also found to always be regular and to continually increase, with maximum amplitude becoming quite large a little further behind the load as it moves through the critical speed (
$V< c_{min}$ (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996). The deflection due to a uniformly accelerating line load was also found to always be regular and to continually increase, with maximum amplitude becoming quite large a little further behind the load as it moves through the critical speed ( $V=c_{min}$) and beyond. We first calculated the contribution from the acceleration alone, but then introduced the initial quasi-static state to produce the appropriate combined result.
$V=c_{min}$) and beyond. We first calculated the contribution from the acceleration alone, but then introduced the initial quasi-static state to produce the appropriate combined result.
The response due to a uniformly decelerating load was extensively investigated, with the relevant initial steady state included or not (designated as ‘impulsively started’). The singularities in the deflection predicted in the non-dissipative linear theory for a steadily moving line load (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996) were always found to be avoided when the load is uniformly decelerated, extending the conclusion in Miles & Sneyd (Reference Miles and Sneyd2003) for the uniformly accelerated load that we confirmed as mentioned above. We retained the earlier Takizawa data in showing that an initial quasi-static deflection due to a constant subcritical load speed propagates with the load as it decelerates. Evolving surface and strain profiles were also found to resemble those in figure 11 of Dinvay et al. (Reference Dinvay, Kalisch and Parau2019) for their Takizawa data, although the deflection and strain predicted by the present line load model are larger in the absence of dissipation.
We further explored the recent prediction that the deflection due to an initially supercritical load decelerating towards rest is significantly reinforced in the neighbourhood of the load, attributed to constructive interference as the erstwhile trailing predominantly gravity wave catches up with the load (cf. Dinvay et al. Reference Dinvay, Kalisch and Parau2019). This phenomenon was investigated in the context of the landing of Hercules transport aircraft on thick sea ice at McMurdo Sound in Antarctica, and then an aircraft accident in the Canadian Arctic. The maximum deflection of several centimetres over 100 m or more may even be smaller under the recommended Hercules landing procedure when reverse thrust is applied – whereas in the accident off Rea Point in the Canadian Arctic, a deflection of several centimetres over 20 m or so on the seasonal thinner sea ice can account for the reported rapid sinking of the cockpit when it came to rest.
Linear theory originally identified the critical speed as a singularity in the deflection due to a steadily moving load on a floating ice plate, and the singularities predicted were also first investigated asymptotically for an impulsively started steadily moving load on a thin elastic or anelastic plate (cf. Squire et al. Reference Squire, Hosking, Kerr and Langhorne1996; Nugroho et al. Reference Nugroho, Wang, Hosking and Milinazzo1999; Wang et al. Reference Wang, Hosking and Milinazzo2004). The linearity assumption is expected to be acceptable when the maximum magnitudes of the steady-state or time-dependent deflections are smaller than the assumed thin plate thickness (as in this article), but that may not always be the case for an accelerating load or for a load decelerating from supercritical speed. The nonlinear problem for a steadily moving load (initially prompted by the predicted singularity at critical speed) has received increasing attention in recent years. However, the inclusion of anelasticity and extension of the existing nonlinear numerical calculations in Guyenne & Parau (Reference Guyenne and Parau2014) to accelerating or decelerating loads is now suggested for future investigation.
Supplementary material
Supplementary material is available at https://doi.org/10.1017/jfm.2022.109.
Declaration of interests
The authors report no conflict of interest.
Appendix A
As noted in § 3, our results for the deflection due to an impulsively started load and to a load initially moving at a constant speed and then decelerating were obtained by approximating the inverse Fourier transform. While the integrand of (2.4) has no poles on the real  $k$ axis and the inverse transform can be applied directly, the integrand which results when the initial condition corresponding to an initial steady state has poles on the real axis when
$k$ axis and the inverse transform can be applied directly, the integrand which results when the initial condition corresponding to an initial steady state has poles on the real axis when  $V^2-c^2=0$. Moreover, the results for accelerating and decelerating loads are expressed in terms of Fresnel integrals. The details of approximations and calculations required to handle these issues are provided below. Estimates of the accuracy of the methods are also given.
$V^2-c^2=0$. Moreover, the results for accelerating and decelerating loads are expressed in terms of Fresnel integrals. The details of approximations and calculations required to handle these issues are provided below. Estimates of the accuracy of the methods are also given.
A.1. Approximating the inverse Fourier transform
As in Miles & Sneyd (Reference Miles and Sneyd2003), the integral with respect to  $t$ corresponding to an impulsively started load steadily moving which was previously uniformly accelerating or decelerating is evaluated analytically. The integral in
$t$ corresponding to an impulsively started load steadily moving which was previously uniformly accelerating or decelerating is evaluated analytically. The integral in  $k$ in (2.4) is approximated as a discrete Fourier transform and the fast Fourier transform algorithm is used to obtain an approximation of the deflection. The discretisation starts by selecting
$k$ in (2.4) is approximated as a discrete Fourier transform and the fast Fourier transform algorithm is used to obtain an approximation of the deflection. The discretisation starts by selecting  $K_{max},$ corresponding to the largest wavenumber to be resolved and the interval
$K_{max},$ corresponding to the largest wavenumber to be resolved and the interval  $-K_{max}< k< K_{max}$ is sub-divided into
$-K_{max}< k< K_{max}$ is sub-divided into  $N$ equal parts of size
$N$ equal parts of size  $\Delta k=2K_{max}/N$. The interval on which the deflection is to be approximated given by
$\Delta k=2K_{max}/N$. The interval on which the deflection is to be approximated given by  $-LH< x< LH$, where
$-LH< x< LH$, where  $L>0$ and
$L>0$ and  $H$ is the depth of the water, is also sub-divided into
$H$ is the depth of the water, is also sub-divided into  $N$ equal parts of size
$N$ equal parts of size  $\Delta x=2LH/N$. The result is the familiar relationship between the discrete Fourier transform of the deflection at the points
$\Delta x=2LH/N$. The result is the familiar relationship between the discrete Fourier transform of the deflection at the points  $k_{j}=j\;\Delta k$ for
$k_{j}=j\;\Delta k$ for  $j$ from
$j$ from  $-N$ to
$-N$ to  $N$ and the approximation of the deflection at
$N$ and the approximation of the deflection at  $x_{j}=j\;\Delta x$ for
$x_{j}=j\;\Delta x$ for  $j$ from
$j$ from  $-N$ to
$-N$ to  $N$. Provided that
$N$. Provided that  $\Delta x\;\Delta k=2{\rm \pi} /N$ the fast Fourier transform algorithm can be used to obtain the discrete approximation of the deflection from its Fourier transform.
$\Delta x\;\Delta k=2{\rm \pi} /N$ the fast Fourier transform algorithm can be used to obtain the discrete approximation of the deflection from its Fourier transform.
For fixed  $N$,
$N$,  $\Delta k={{\rm \pi} }/{LH}$ and
$\Delta k={{\rm \pi} }/{LH}$ and  $K_{max}=({N}/{2})({{\rm \pi} }/{LH})$ so that
$K_{max}=({N}/{2})({{\rm \pi} }/{LH})$ so that  $L$ and
$L$ and  $N$ must be selected such that the contribution to the integral in (2.4) for
$N$ must be selected such that the contribution to the integral in (2.4) for  $|k|>K_{max}$ is sufficiently small. For the results presented in this article,
$|k|>K_{max}$ is sufficiently small. For the results presented in this article,  $N=8192$ and
$N=8192$ and  $L=100$. Values of
$L=100$. Values of  $N$ between
$N$ between  $1024$ and
$1024$ and  $16\,384$ and values of
$16\,384$ and values of  $L$ between
$L$ between  $100$ and
$100$ and  $200$ were used to assess the accuracy of our approximations. As a strong accuracy test for the Rea Point data, we adopted the initial speed
$200$ were used to assess the accuracy of our approximations. As a strong accuracy test for the Rea Point data, we adopted the initial speed  $63$ m s
$63$ m s $^{-1}$ and the small deceleration of
$^{-1}$ and the small deceleration of  $-1$ m s
$-1$ m s $^{-2}$ to rest at time
$^{-2}$ to rest at time  $t=63\,$s. In figure 20 where
$t=63\,$s. In figure 20 where  $L=100$ is used in all cases, the blue curve corresponds to the deflection obtained when
$L=100$ is used in all cases, the blue curve corresponds to the deflection obtained when  $N=8192$, the red circles when
$N=8192$, the red circles when  $N=4096$, the green circles when
$N=4096$, the green circles when  $N=16\,384$ and the black circles to numerical integration in (2.8) from
$N=16\,384$ and the black circles to numerical integration in (2.8) from  $0$ to
$0$ to  $2K_{max}$. Figure 21 compares the deflections computed using
$2K_{max}$. Figure 21 compares the deflections computed using  $N=8192$, where the blue curve corresponds to
$N=8192$, where the blue curve corresponds to  $L=100$ and the green circles to
$L=100$ and the green circles to  $L=200$. The accuracy is impressive, although larger values of
$L=200$. The accuracy is impressive, although larger values of  $N$ could be needed for larger time
$N$ could be needed for larger time  $t$ than involved in our numerical calculations.
$t$ than involved in our numerical calculations.

Figure 20. The computation for the Rea Point data using  $N=4096,$
$N=4096,$  $8192$ and
$8192$ and  $16\,384$ with
$16\,384$ with  $L=100$. The blue curve corresponds to the deflection obtained when
$L=100$. The blue curve corresponds to the deflection obtained when  $N=8192$ and the coloured circles denote the other
$N=8192$ and the coloured circles denote the other  $N$ values, as indicated in the legend and stated in the text.
$N$ values, as indicated in the legend and stated in the text.

Figure 21. The computation for the Rea Point data using  $L=100$ and
$L=100$ and  $200$ with
$200$ with  $N=8192$. The blue curve corresponds to
$N=8192$. The blue curve corresponds to  $L=100$ and the green circles to
$L=100$ and the green circles to  $L=200$, as indicated in the legend and stated in the text.
$L=200$, as indicated in the legend and stated in the text.
A.2. Approximating the Fresnel integrals
The Fresnel integrals were approximated using formulae that appear in chapter 7 of Abramowitz & Stegun (Reference Abramowitz and Stegun1964) using the series expansions for  $|z|<3$ and asymptotic expansions for
$|z|<3$ and asymptotic expansions for  $|z|>3$ to evaluate the real and imaginary parts of
$|z|>3$ to evaluate the real and imaginary parts of  ${\mathcal {F}}(z)=\int _{0}^{z} {\rm e}^{{\rm i}s^{2}} \,{\rm d}s$. Specifically, the first 20 terms of the series expansions 7.3.12 and 7.3.14 were used for
${\mathcal {F}}(z)=\int _{0}^{z} {\rm e}^{{\rm i}s^{2}} \,{\rm d}s$. Specifically, the first 20 terms of the series expansions 7.3.12 and 7.3.14 were used for  $|z|<3$ together with 7.3.9 and 7.3.10 and the first terms of the asymptotic expansions 7.3.27 and 7.3.28 for
$|z|<3$ together with 7.3.9 and 7.3.10 and the first terms of the asymptotic expansions 7.3.27 and 7.3.28 for  $|z|\geq 3$. Values obtained using these approximations were compared with values shown in the tables on pages 320–321 in the Handbook, which demonstrated an accuracy better than
$|z|\geq 3$. Values obtained using these approximations were compared with values shown in the tables on pages 320–321 in the Handbook, which demonstrated an accuracy better than  $10^{-4}$. The accuracy in approximating
$10^{-4}$. The accuracy in approximating  $I(c)$ and
$I(c)$ and  $I(-c)$ was usually sufficient. However, if
$I(-c)$ was usually sufficient. However, if  $\gamma t$ is small the differences taken in evaluating
$\gamma t$ is small the differences taken in evaluating  $I(c)$ and
$I(c)$ and  $I(-c)$ respectively could lead to inaccurate approximations, so in that case the source integrals such as
$I(-c)$ respectively could lead to inaccurate approximations, so in that case the source integrals such as  $(1/\gamma )\int _{-\gamma \alpha }^{\gamma (t-\alpha )}{\rm e}^{{\rm i}s^{2}}\,{\rm d}s$ were approximated numerically using Romberg integration.
$(1/\gamma )\int _{-\gamma \alpha }^{\gamma (t-\alpha )}{\rm e}^{{\rm i}s^{2}}\,{\rm d}s$ were approximated numerically using Romberg integration.
A.3. The initial condition
The results in Miles & Sneyd (Reference Miles and Sneyd2003) envisage loads started impulsively at time  $t=0$, but for loads initially moving at constant speed
$t=0$, but for loads initially moving at constant speed  $V$ the Fourier transform of the deflection becomes
$V$ the Fourier transform of the deflection becomes
 \begin{equation} -\frac{\tanh kH}{k}\left[\frac{\cos kct-{\rm i}\frac{V}{c}\sin kct}{c^{2}-V^{2}}+\frac{k}{c}\int_{0}^{t} \exp({-{\rm i}kX(\tau)})\sin kc(t-\tau )\,{\rm d}\tau\right]. \end{equation}
\begin{equation} -\frac{\tanh kH}{k}\left[\frac{\cos kct-{\rm i}\frac{V}{c}\sin kct}{c^{2}-V^{2}}+\frac{k}{c}\int_{0}^{t} \exp({-{\rm i}kX(\tau)})\sin kc(t-\tau )\,{\rm d}\tau\right]. \end{equation}
The first term is the Fourier transform at time  $t$ of the component of the deflection due to the evolution of the initial condition and the second term is the Fourier transform of the component of the deflection at time
$t$ of the component of the deflection due to the evolution of the initial condition and the second term is the Fourier transform of the component of the deflection at time  $t$ due to the moving load at the position
$t$ due to the moving load at the position  $X(t)$. Since the second term has no poles on the real
$X(t)$. Since the second term has no poles on the real  $k$ axes for the class of load positions
$k$ axes for the class of load positions  $X(t)$ considered in this article, the discrete inverse Fourier transform can be applied directly to obtain an approximation to its inverse Fourier transform. The first term has poles on the real
$X(t)$ considered in this article, the discrete inverse Fourier transform can be applied directly to obtain an approximation to its inverse Fourier transform. The first term has poles on the real  $k$ axes at points where
$k$ axes at points where  $c^{2} -V^{2}=0$ and consequently for
$c^{2} -V^{2}=0$ and consequently for  $V>c_{min}$ the discrete Fourier transform cannot be applied directly. However, this term can be re-written in the form
$V>c_{min}$ the discrete Fourier transform cannot be applied directly. However, this term can be re-written in the form
 \begin{align} & -\frac{\tanh kH}{k} \left[\frac{\cos kct-{\rm i}\frac{V}{c}\sin kct}{c^{2}-V^{2}}\right] =\frac{\tanh kH}{c+V}t \left[\sin\frac{k(c+V)t}{2} \text{sinc} \frac{k(c-V)t}{2}\right.\nonumber\\ &\left.\qquad+{\rm i}\frac{V}{c}\left[\cos\frac{k(c+V)t}{2}\text{sinc} \frac{k(c-V)t}{2}-\text{sinc} (kVt)\right]\right]\nonumber\\ &\qquad - \frac{\tanh kH}{k}\frac{\exp({-{\rm i}kVt})}{c^{2}-V^{2}}. \end{align}
\begin{align} & -\frac{\tanh kH}{k} \left[\frac{\cos kct-{\rm i}\frac{V}{c}\sin kct}{c^{2}-V^{2}}\right] =\frac{\tanh kH}{c+V}t \left[\sin\frac{k(c+V)t}{2} \text{sinc} \frac{k(c-V)t}{2}\right.\nonumber\\ &\left.\qquad+{\rm i}\frac{V}{c}\left[\cos\frac{k(c+V)t}{2}\text{sinc} \frac{k(c-V)t}{2}-\text{sinc} (kVt)\right]\right]\nonumber\\ &\qquad - \frac{\tanh kH}{k}\frac{\exp({-{\rm i}kVt})}{c^{2}-V^{2}}. \end{align}
The term within the outside square brackets is regular on the real  $k$ axis so that the inverse Fourier transform of the corresponding expression can be approximated using the discrete inverse Fourier transform. The inverse Fourier transform of the last term (the steadily moving load contribution) can be evaluated analytically using the method of residues. The details of the contour integration can be found in the online Supplementary Materials available at https://doi.org/10.1017/jfm.2022.109. See also Davys et al. and Schulkes & Sneyd discussed in chapter 5 of Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996).
$k$ axis so that the inverse Fourier transform of the corresponding expression can be approximated using the discrete inverse Fourier transform. The inverse Fourier transform of the last term (the steadily moving load contribution) can be evaluated analytically using the method of residues. The details of the contour integration can be found in the online Supplementary Materials available at https://doi.org/10.1017/jfm.2022.109. See also Davys et al. and Schulkes & Sneyd discussed in chapter 5 of Squire et al. (Reference Squire, Hosking, Kerr and Langhorne1996).
As an illustration, figure 22 shows the steady-state solutions corresponding to the load moving in the three speed regimes:  $V< c_{min}$,
$V< c_{min}$,  $c_{min}< V<\sqrt {gH}$ and
$c_{min}< V<\sqrt {gH}$ and  $V>\sqrt {gH}$.
$V>\sqrt {gH}$.

Figure 22. Steady-state deflections at the constant subcritical and supercritical speeds consistent with the three limiting results produced in § 3 for the Takizawa data.



















































































































