



1. INTRODUCTION
A driver going the wrong way in a lane causing an incident has become one of the major concerns for road safety. It may cause hazardous traffic situations and thus, lead to serious accidents. There are nearly 2,000 wrong-way drivers on the German Autobahn each year that travel against the traffic flow (General German Automobile Club, 2015). They caused around 80 accidents and 20 fatalities in 2015. To improve road safety in an effective way, a “wrong-way” driver detection system based on kinematic Global Navigation Satellite System (GNSS) positioning, digital road maps and map-matching techniques is being developed within the Ghosthunter research project (Wang et al., Reference Wang, Metzner and Schwieger2017). For detecting wrong-way driving, a weighting-function-based map-matching algorithm was proposed in Wang et al. (Reference Wang, Metzner and Schwieger2017). This algorithm considered standard map attributes such as direction of travel and street name in the map-matching processes. In order to improve the success rate of this algorithm, this paper aims at exploring the potential use of lane-level attributes and Advanced Driver Assistance Systems (ADAS) height data in the map-matching processes.
The digital road network data used for testing the performance (success rate and time consumption) of the map-matching algorithm is provided by the commercial mapmaker HERE. The designated investigation areas in this paper are the entrance and exit areas on the German Autobahn A81 surrounding the city of Stuttgart.
The remainder of the article is structured as follows. Section 2 gives a detailed overview of existing map-matching algorithms. Section 3 explains how the commercial digital road map data is digitised and highlights general characteristics of standard and precise attribute information. The proposed enhancement of the map-matching algorithm by taking advantage of lane-level attributes and ADAS height data is presented in Section 4. In Section 5, the map-matching results are evaluated based on adequate sets of real-world and simulated vehicle trajectories. Section 6 concludes the paper and points out future challenges.
2. RELATED WORK
Wrong-way drivers usually cause serious accidents or distract other traffic participants. Often, innocent road users are involved. Safety countermeasures to prevent wrong-way driving incidents have become a matter of public concern. Before the authors started the Ghosthunter research project in 2015, there were already some methods for preventing wrong-way driving incidents. The preventive actions undertaken by motorway operators were mostly implemented at the infrastructure level by reinforcing traffic signs and road markings on highway entrances and exit ramps (Vicedo, Reference Vicedo2006; Babic and Valic, Reference Babic and Valic2010). For the last ten years, wrong-way driver detection systems based on equipment such as radio sensors, video surveillance cameras, magnetic loops and Doppler sensors have been developed and applied (Hassan et al., Reference Hassan, Birch, Young and Chatwin2013; Krausz, Reference Krausz2013; Baillemont and Dumas, Reference Baillemont and Dumas2017). However, these countermeasures can be costly and for full coverage a large amount of equipment is needed. An innovative solution based on GNSS positioning and digital road maps, developed by the authors within the Ghosthunter research project, is more cost effective than the above-mentioned methods, since both a GNSS receiver and digital road maps are included in current automotive navigation systems. Thus, no additional hardware costs are incurred.
Map-matching is a technique that is widely used in current driver assistance systems to unambiguously assign vehicle positions to the correct road links. With the rapid progress in the fields of driver assistance and safety systems, map-matching is becoming increasingly important. Various algorithms have been developed during the past decade focusing on different application needs. In this section an overview of existing map-matching algorithms with emphasis on their limitations and problems is presented.
The general map-matching algorithm without a decision-making process can be roughly divided into three steps. The first step involves selecting candidate roads from the underlying digital road network. This step is usually simplified and accelerated by limiting the number of candidate roads using a buffer around the (estimated) vehicle position (Hashemi and Karimi, Reference Hashemi and Karimi2016). The second step involves identifying the correct road segment among candidates using suitable matching criteria. The third step involves determining the vehicle location on the selected road segment, for example by using orthogonal projection (Velaga et al., Reference Velaga, Quddus and Bristow2009).
As described in Blazquez et al. (Reference Blazquez, Ries, Leon and Miranda2018), map-matching has been widely studied for decades and existing algorithms have usually been classified depending on the level of complexity. Quddus et al. (Reference Quddus, Ochieng and Noland2007) categorised map-matching approaches in the literature into four groups: geometric, topological, probabilistic and advanced algorithms. Hashemi and Karimi (Reference Hashemi and Karimi2016) preferred to group existing map-matching methods into simple, weight-based and advanced. A more precise and comprehensive classification was presented in Wang et al. (Reference Wang, Wachsmuth, Metzner and Schwieger2018): geometric, topological and attribute-based. Moreover, taking stochastic and decision-making methods into account, map-matching processes can be further optimised.
In early map-matching studies, for example Bernstein and Kornhauser (Reference Bernstein and Kornhauser1996) and Czommer (Reference Czommer2000), solely geometric information that describes the absolute position and the shape of the vehicle trajectories or the digital road segments, was used. The three most common geometric map-matching methods are “point-to-point”, “point-to-curve” and “curve-to-curve” (Quddus et al., Reference Quddus, Ochieng and Noland2007). Such simple algorithms are easy to implement and fast, but mostly unreliable. For example, “point-to-curve” matching determines the most likely road segment on which the vehicle is traveling purely by the shortest distance measure between a single vehicle position and the road segments. However, due to the inaccurate matching criterion, a map-matching error may occur frequently, particularly when the vehicle is crossing a complex intersection, travelling on highways with parallel roads, or in urban environments with poor GNSS signal quality. To improve the performance of the conventional “point-to-curve” matching algorithm, Oran and Jailet (Reference Oran and Jaillet2013) proposed a more precise criterion that considers the cumulative distribution function over an entire road segment in computing a point-wise proximity weight instead of the classical shortest distance measure. Although the shortest distance (closeness) criterion can be effectively improved in this way, performance of a purely geometric map-matching algorithm in urban scenarios is still limited, due to high road density.
Topological map-matching methods additionally take advantages of topological constraints such as road connectivity, contiguity and turn restrictions to minimise the map-matching error. As stated in Blazquez et al. (Reference Blazquez, Ries, Leon and Miranda2018), topological map-matching algorithms are most commonly applied for vehicle localisation and navigation. They usually employ different matching criteria (for example closeness, heading difference and link connectivity) and the corresponding weight coefficients to identify the most probable segment among candidates (Hashemi and Karimi, Reference Hashemi and Karimi2016; Quddus and Washington, Reference Quddus and Washington2015). However, unsuitable weight coefficients can result in performance degradation of map-matching. Velaga et al. (Reference Velaga, Quddus and Bristow2009) identified the best weight coefficients by repeating map-matching processes with random values between 1 and 100 for urban, suburban and rural areas. In the currently proposed map-matching algorithm, the three selected criteria (heading, closeness and link connectivity) are equally weighted (see Section 4). This algorithm performed well in Autobahn entrance and exit areas and it was verified to be robust, reliable and efficient by extensive experimentation (Wang et al., Reference Wang, Metzner and Schwieger2017).
Map-matching algorithms can be further optimised with the consideration of map attributes (such as direction of travel and street name), or by combining with stochastic approaches (Kalman filters, particle filtering and Hidden Markov models) and decision-making processes (Fuzzy Logic, Bayesian inference and multi-hypothesis techniques) (Wang et al., Reference Wang, Wachsmuth, Metzner and Schwieger2018).
In this paper, an enhanced map-matching algorithm is presented by adding lane-level attributes and height data. This algorithm is expected to correctly determine the road segment that the vehicle is actually travelling on.
3. DIGITAL ROAD NETWORK DATA
This section provides detailed information about the digital road network data of the commercial map provider HERE. This was first used for testing the performance of the proposed map-matching algorithms in Wang et al. (Reference Wang, Metzner and Schwieger2017) and afterwards in this paper. Wang et al. (Reference Wang, Metzner and Schwieger2017) focused mainly on the applied weighting-function related to heading, closeness and link connectivity criteria and gave illustrative results on GNSS-based real-world and simulated vehicle trajectory datasets. The aim of this paper is to investigate whether the precise attribute information (lane-level and ADAS height) can contribute effectively to improving the proposed algorithm introduced in Wang et al. (Reference Wang, Metzner and Schwieger2017) in terms of success rate and computational time.
3.1. Road network digitisation and standard map attributes
Vector map data consists of sequentially ordered pairs of the World Geodetic System 1984 (WGS84) geographic coordinates (latitude, longitude) which are transformed into Universal Transverse Mercator (UTM) coordinates, further used as inputs for the map-matching algorithm.
Figure 1 illustrates an example of a junction that connects the Autobahn A81 and a tertiary road. The Autobahn junctions that involve data errors (highlighted with yellow arrows and ellipses in Figure 1), need special consideration in the map-matching process. Such map data errors often result in a failure of map-matching. The missing road links in the digital road network are also quite challenging to deal with. Generally, the completeness and correctness of the digital road network data depends significantly on functional classification of roads defined by each map provider. A certain number of roads of lower functional classifications like tertiary and quaternary roads are often not included in the database (HERE, 2015). In addition to geometric data, map attributes (for example direction of travel, ramp type and street name) provide additional traffic-relevant information that is required by most automotive navigation systems. The inaccuracies in the digital road map data, for example roads with simplified geometry and inaccurate map attributes, may greatly impact on the performance of map-matching algorithms.

Figure 1. Autobahn junction Hildrizhausen (digital road map of HERE in comparison with Google Satellite Maps).
3.2. Data elimination for wrong-way driver detection
The digital road network database contains auxiliary files related to road markings, traffic signs, restricted and prohibited driving manoeuvres, etc, which generally need to be considered for route planning (HERE, 2015). Nevertheless, the driving restrictions cannot be used for detecting wrong-way driving, since it cannot be assumed that all the vehicles travel in directions normally allowed in real traffic situations.
Figure 2 illustrates two example scenarios of wrong-way driving: in scenario A, the vehicle has crossed over the divider (maybe solid line or shaded area markings in real situations) from an entrance ramp and entered the Autobahn through an exit ramp; in scenario B, the vehicle has performed a 180 degree rotation to travel in the opposite direction (Beckmann et al., Reference Beckmann, Frankl, Wang, Metzner, Schwieger, Pany and Eissfeller2017).

Figure 2. Wrong-way driving scenario A and B, right-hand traffic example (Beckmann et al., Reference Beckmann, Frankl, Wang, Metzner, Schwieger, Pany and Eissfeller2017).
Both driving manoeuvres shown in Figure 2 are hazardous and may lead to extremely serious accidents. The implemented map-matching algorithm in the desired wrong-way driving detection system does not assume that the vehicle always travels legally on the road. The digital map data associated to driving restrictions such as prohibited directions of travel, turn restrictions and lane crossing restrictions are not taken into account in the map-matching process, but later on for wrong-way driving detection.
3.3. Precise map attributes
In this subsection, lane-level attributes and the ADAS product provided by HERE are introduced. The HERE lane-level attribute table consists of 16 different types of lane-level information, such as lane type, lane divider and lane direction (HERE, 2015). HERE's ADAS product is supplied as an extension to the standard map products. It contains WGS84 coordinates (geographic three-dimensional (3D): latitude, longitude and ellipsoidal height) and precise geometric information (curvature, heading direction and angle of slope) for road segments with enhanced geometry. A road link for which ADAS data is available means that it satisfies the requirements of ADAS applications, with an absolute positional accuracy of 5 m and a shape accuracy of 1 m (HERE, 2015).
Figure 3 illustrates a road link (an entrance ramp to the German Autobahn A81 with orange arrowheads indicating the direction of traffic flow) marked with a black arrow in the right panel of the figure, while its spline representation in the HERE map data is shown as a thin solid red line on the left. The shape of this road link cannot be regarded as convex or concave, but fluctuates from being convex to concave at one inflection point, and then from being concave to convex at the other inflection point, in contrast to the connecting line between the nodes A and B (the blue line in the left panel) with a length of more than 300 m. More precise information on direction change can be acquired by using this ADAS product. This data is commonly used in driver assistance systems, for example to trigger warnings of dangerous curves, in addition to road signs. In this paper, only the ADAS height coordinates are integrated into the map-matching algorithm to test if the desired improvement can be achieved.

Figure 3. Shape points from No. 1 to 18, and nodes A and B of an example road link (left) along with its geometric representation in HERE map data (right), in comparison with the Google Satellite Maps (middle).
4. MAP-MATCHING ALGORITHM ENHANCEMENT
In this paper, an enhancement is proposed by considering lane-level attributes and ADAS height data in the map-matching processes. The original algorithm is the weighting-function-based topological map-matching algorithm presented in Wang et al. (Reference Wang, Metzner and Schwieger2017). It employed heading, proximity (closeness) and link connectivity as similarity criteria to localise the vehicle position on the most probable candidate road link in a given digital road network, after Quddus and Washington (Reference Quddus and Washington2015) and Velaga et al. (Reference Velaga, Quddus and Bristow2009).
As shown in Figure 4, the heading angle  $\Delta \alpha$ is determined as the heading difference between the vehicle's driving direction and the direction of a candidate road link, while the proximity (closeness) criterion uses the perpendicular distance D from a point to a road link to find the nearest one (Wang et al., Reference Wang, Metzner and Schwieger2017).
$\Delta \alpha$ is determined as the heading difference between the vehicle's driving direction and the direction of a candidate road link, while the proximity (closeness) criterion uses the perpendicular distance D from a point to a road link to find the nearest one (Wang et al., Reference Wang, Metzner and Schwieger2017).

Figure 4. Heading and proximity (closeness) criterion
The third matching criterion takes the link connectivity X between the candidate road links of the current vehicle position (the red dot in the orange buffer zone) and the previous matched road link (marked blue) additionally into account in order to compensate the shortcomings of the first two criteria (Wang et al., Reference Wang, Metzner and Schwieger2017).
Additionally, Wang et al. (Reference Wang, Metzner and Schwieger2017) imposed three conditional validation processes by using empirically determined threshold values to reduce matching errors: (1) a threshold maximum value of 11 m for the perpendicular distance between the candidate road link and the vehicle position; (2) a threshold maximum value of 39° for the difference between the vehicle headings at two consecutive epochs (one-second interval); (3) a threshold maximum value of 5 m for the difference between the height coordinates of the current measured vehicle position and its projected position on the identified digital road link. The aforementioned three matching criteria are integrated into a weighting-function for computing the Total Weighting Score (TWS) for each successive vehicle position (see Equation (1)). Since the heading angle of the first fixed vehicle position may be inaccurate, it is not used in the algorithm; therefore the map-matching process begins with the epoch number i = 2. As the second vehicle position has no previously matched road link, the parameter X defined for link connectivity is considered from i = 3. The variable b represents half of the side length of the square buffer zone (see the orange square in Figure 5).

Figure 5. Illustration of the link connectivity criterion after Wang et al. (Reference Wang, Metzner and Schwieger2017).
 $$TWS_i=\begin{cases} \frac{1}{2}\cos (\Delta \alpha)+\frac{1}{2}\left(\frac{\sqrt{2}b-D}{\sqrt{2}b}\right), & i=2;\\ \noalign{\vskip6pt} \frac{1}{3}\cos (\Delta \alpha)+\frac{1}{3}\left(\frac{\sqrt{2}b-D}{\sqrt{2}b}\right)+\frac{1}{3}X, & i\geq 3;\end{cases}$$
$$TWS_i=\begin{cases} \frac{1}{2}\cos (\Delta \alpha)+\frac{1}{2}\left(\frac{\sqrt{2}b-D}{\sqrt{2}b}\right), & i=2;\\ \noalign{\vskip6pt} \frac{1}{3}\cos (\Delta \alpha)+\frac{1}{3}\left(\frac{\sqrt{2}b-D}{\sqrt{2}b}\right)+\frac{1}{3}X, & i\geq 3;\end{cases}$$It should be noted that the three selected matching criteria (heading, proximity and link connectivity) are equally weighted in the map-matching processes. This has been empirically proven to be the most appropriate weighting method for map-matching in Autobahn entrance and exit areas where wrong-way driving is most likely to occur. Through extensive experimentation with real-world and simulated trajectories, this algorithm is verified to be robust. The results in Wang et al. (Reference Wang, Metzner and Schwieger2017) showed that the vehicle position can still be matched to the correct road segment even if digital road map data or GNSS measurements are inaccurate. Nevertheless, the weighting method may need to be optimised in other specific environmental settings such as dense urban or rural areas. Calibration methods for identifying well-performing or optimal weight parameter values are described in Blazquez et al. (Reference Blazquez, Ries, Leon and Miranda2018), Oran and Jailet (2013) and Velaga et al. (Reference Velaga, Quddus and Bristow2009).
In this paper, the efficiency of applying lane-level attributes and ADAS height data in enhancing the success rate of matching results is to be discussed and demonstrated through extensive testing based on both real-world and simulated vehicle trajectory data. The lane-level attributes and height data aid in identifying the correct road link for the vehicle position. Before comparing the computed probability values of the defined TWS function of all candidate road links selected using a buffer zone, additional tests should be performed to facilitate positive identification of the correct road link on which the vehicle is currently travelling (Wang et al., Reference Wang, Metzner and Schwieger2017). Details will be presented in Sections 4.1 and 4.2.
4.1. Enhancing the algorithm using lane-level attributes
The digital road maps used in this paper are not precise lane-level road maps. This means that the roads are not digitised separately for each lane. For example, a two-lane unidirectional ramp is represented by a single solid line in the digital road map (see Figure 6 lower left). Figure 6 gives an example of a situation in which lane-level attributes are essential for avoiding matching errors. As shown in Figure 6, a Y-shaped bifurcation (commonly known as a “Y-junction”) consists of three road links, numbered 1, 2, and 3. It would be quite challenging to correctly identify the corresponding road link in this case, especially when the vehicle moves between the road links 1 and 2 (see Figure 6) after entering the junction. By using lane-level attributes such as lane types and lane divider types, this Y-junction problem can be efficiently solved. A result example is given in Section 5.1.

Figure 6. An illustrative example of the benefits of using lane-level attributes in a map-matching process: a top view of the German Autobahn junction Stuttgart in Google Satellite Maps (upper left), geometric representation of a selected junction area including a Y-shaped bifurcation in the digital road network of HERE (lower left), a closer look at the selected area in Google Satellite Maps (right).
4.2. Enhancing the algorithm using ADAS height data
Another problematic situation, as mentioned in Velaga et al. (Reference Velaga, Quddus and Bristow2009), in which matching errors may occur, is in underpass/overpass areas. As presented in Figure 7, on the southwest corner of the German Autobahn junction Tuningen, the divided Autobahn A81 (marked with yellow arrows) crosses above a country road (marked with a white arrow) which belongs to the third class of roads in the HERE digital road map database. If the information about the driving restrictions is not taken into account for wrong-way driver detection (as mentioned in Section 3.2), it is difficult to distinguish whether an overpass exists or whether these two roads intersect. So, the identification of the proper candidate road link, which represents the correct road link, can hardly be performed by applying standard digital road map data.
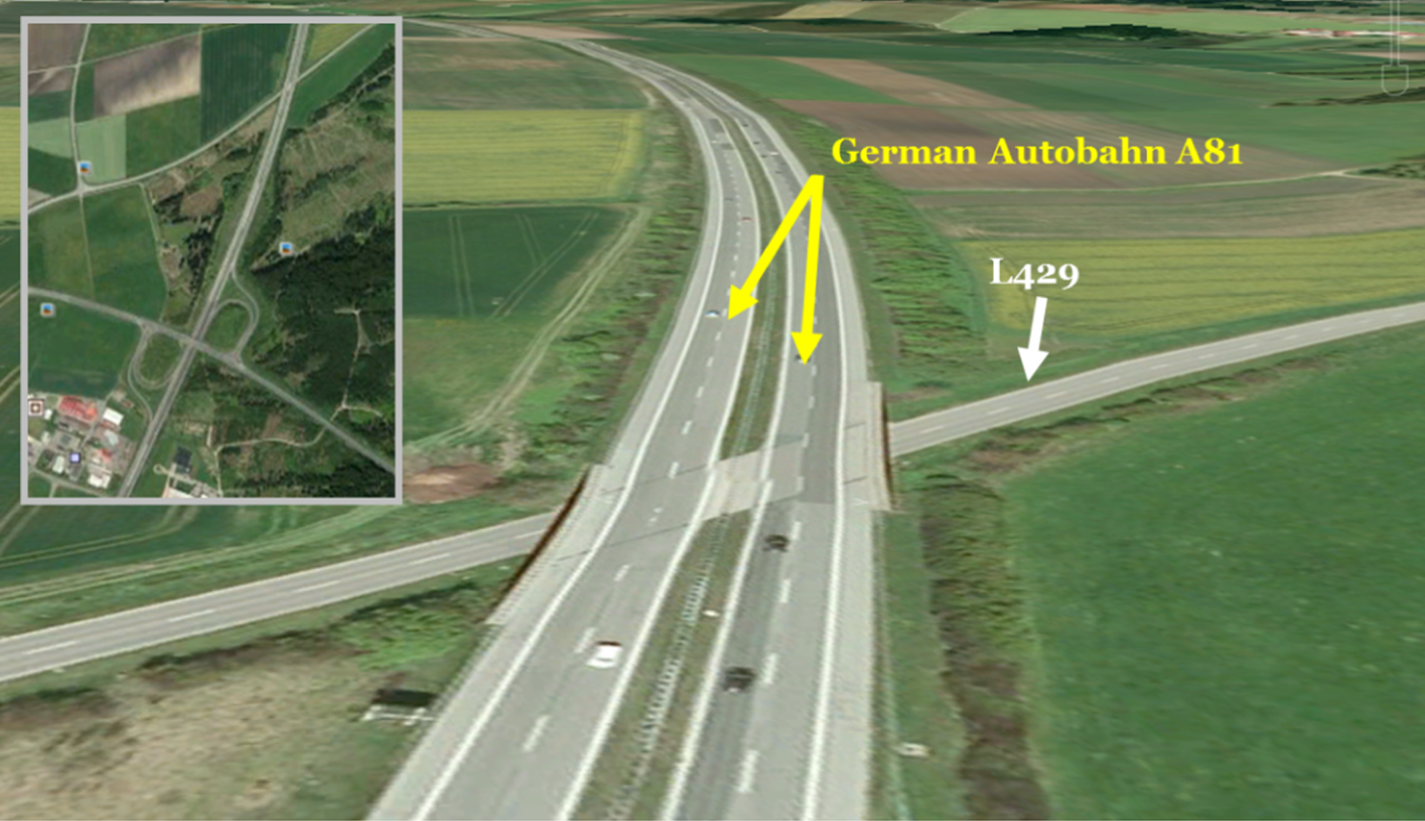
Figure 7. An illustrative example of the benefits of using ADAS height data in a map-matching process: an overpass segment that crosses over a bidirectional country road named L429, with a top view in Google Satellite Maps on the upper left corner.
To tackle the problem, one potential method is to use HERE ADAS height data to attempt to support the map-matching algorithm. Without consideration of height data of roads or other related information, the map-matching algorithm allows impossible moves like jumps between overpasses and streets. To avoid such matching errors, an attempt was made to determine an empirical threshold value of 5 m for checking whether one road crosses over another one or two road links actually intersect. That is to say, if a vehicle goes up through the overpass, its height coordinate (WGS84 ellipsoidal height) should differ at least 5 m from the other roads (Wang et al., Reference Wang, Metzner and Schwieger2017).
5. ALGORITHM EVALUATION
In this section, the performance evaluation of the proposed map-matching algorithm based on real-world and simulated vehicle trajectory data is described in detail. Since the success rate of the original algorithm was discussed in Wang et al. (Reference Wang, Metzner and Schwieger2017), this section focuses on illustrating the algorithm improvement achieved by using lane-level attributes and ADAS height data. Furthermore, the computational time needed for identifying the correct road link for the vehicle position is compared and analysed.
5.1. Matching results
This section shows two examples associated with the potential use of precise attribute information (described in Sections 4.1 and 4.2) for improving the success rate of the proposed map-matching method.
Figure 8 depicts the map-matching results at a German Autobahn junction, where the five-lane Autobahn (the road link No. 3 in Figure 6) diverges into two adjacent roads: one two-lane exit ramp (the road link No. 2 in Figure 6) and one three-lane auxiliary Autobahn (the road link No. 1 in Figure 6). In this situation, the link connectivity criterion would lead to unexpected matching errors (see Figure 8, left panel, the blue line marked with a red arrow).

Figure 8. An illustrative example of map-matching results: without (left) and with (right) use of lane-level attributes.
The actual driving direction is derived from the GNSS-based vehicle position of G29 and the heading angle of the wrongly identified road link consequently differ little from each other and both the correct and the incorrectly identified roads are connected to the previously matched road. To distinguish if the vehicle is located at a junction, lane types and lane divider types are utilised as additional information. In this case, the link connectivity between the previously identified road link and each candidate road link should not be considered so that the weights for the other two matching criteria - heading and proximity (closeness) - can be increased from 1/3 to 1/2. Thus, the computed TWS of the road link No. 2 is raised from 54·02% to 80·32% (greater than the TWS of the road link No. 1). In this way, the matching error is corrected effectively by adjusting the weight coefficient values. However, the influence of a change in the weight coefficients on the TWS also depends considerably on the other matching criteria (heading angle  $\Delta \alpha$ and the perpendicular distance D).
$\Delta \alpha$ and the perpendicular distance D).
In the example in Figure 9, one of several new simulated vehicle trajectories was used to prove the necessity of the ADAS height data for enhancing the success rate of the proposed algorithm. As mentioned in Section 4, additional tests regarding the empirically determined threshold value of 5 m enable the algorithm to distinguish if the vehicle is travelling on an overpass. As illustrated in Figure 9, the vehicle positions denoted with black asterisks that are matched to a wrong road link are depicted with a red arrow. It can obviously be seen that the matching error (red arrow in Figure 9, left panel) at the simulated vehicle position G12 is eliminated. The correct road link is identified by employing ADAS height data (blue arrow in Figure 9, right panel).

Figure 9. An illustrative example of map-matching results: without (left) and with (right) use of ADAS height data.
The examples in Figures 8 and 9 demonstrate the fact that map-matching errors occurring at junctions and overpasses can be tackled in a quite effective way by applying lane-level attributes and ADAS height data. The proposed map-matching algorithm performs well in entrance and exit areas to highways, and it has attained a high level of success rate (99·5% with real-world vehicle trajectories, see Table 1) in identifying the road on which the vehicle is travelling, compared with other existing map-matching algorithms, for example presented in Blazquez et al. (Reference Blazquez, Ries, Leon and Miranda2017), Quddus and Washington (Reference Quddus and Washington2015) and Velaga et al. (Reference Velaga, Quddus and Bristow2010) with 97·9%, 98·6% and 97·8% chances of success. Additionally, as can be seen in Table 1, the accuracies of vehicle positioning data may strongly impact the performance of map-matching algorithms. The success rate of the algorithm has been slightly reduced (98·2%) due to inaccuracies of the simulated vehicle positions. The algorithm's improvement on success rate of approximately 0·06% is observed when compared against the previous version. Although the percentage of the performance improvement delivered by the proposed algorithm is small, it is of greater importance in correcting map-matching errors at junctions and overpasses and thus ensures algorithm's reliability, especially for safety-critical applications.
Table 1. Map-Matching results

5.2. Performance evaluation results
For reliable wrong-way driver detection in real time, it should be ensured that the vehicle position at each epoch (of 1 second) is matched to the correct road link as quickly as possible. Therefore, another relevant aspect for real-time applications is its response time. To state if the proposed map-matching algorithm is suitable for real-time execution, performance evaluation regarding its computational time for each epoch is presented in this section. For this purpose, simulated vehicle trajectory data was created based on a Google Earth path. This passes through three junctions on the German Autobahn A81 and includes 950 consecutive vehicle positions at 1 s time intervals. The major advantage of the trajectory simulations is that the sampling rate can be set individually. For instance, a simulated vehicle trajectory with sampling rates of 5 Hz and 10 Hz can be derived from the original one at 1 Hz.
The plots depicted in Figure 10 show the computational time needed to identify the correct corresponding road link of each vehicle position. The computational time is mainly dependent on the number of candidate road links and the complexity of the local road connectivity. In principle, at junctions or in overpass/underpass areas, more computational time is required to perform the map-matching procedure.

Figure 10. Analysis of time consumption of the proposed map-matching algorithm based on a simulated trajectory dataset: with consideration of both lane-level attributes and ADAS height data (upper panel), neither of them (lower panel).
Table 2 gives a summary of the results illustrated in Figure 10. Due to computational simplicity of the proposed algorithm, it consumes less than 0·15 s on average. However, while integrating ADAS height data into the map-matching process, the algorithm is more than four times slower at selecting the correct road link. The data structure of the ADAS attribute tables must be optimised to reduce the computational time.
Table 2. Performance evaluation in summary

Whether the proposed map-matching algorithm is appropriate for hard or soft real-time systems or not depends on the required temporal constraints which should be investigated while developing a prototype for the desired wrong-way driver detection system. The amount of lane-level information is small compared to the ADAS attributes, so the time needed for accessing the lane-level data can be neglected. In comparison with the sampling interval of 1 second, the mean computational time of 0·146 seconds can be considered acceptable for the map-matching process in real time.
6. CONCLUSION AND FUTURE RESEARCH TRENDS
An enhanced map-matching algorithm is proposed for wrong-way driving detection on the German Autobahn, which takes advantage of lane-level map attributes and ADAS height data. The performance (success rate and computational time) have been verified and compared with the weighting-function-based topological map-matching algorithm introduced in the authors' previous paper. The experimental results show that the enhanced map-matching algorithm performs quite well in the Autobahn entrance and exit areas, with high success rates of 99·5% and 98·2% in identifying the road on which the vehicle is travelling while real-world and simulated vehicle trajectories are used. These results also confirm that the usage of lane-level map attributes and ADAS height data can effectively help to detect and correct mismatches at junctions and overpasses. The algorithm's improvement on success rate of approximately 0·06% is observed when compared against its previous version. Although the percentage of the performance improvement delivered by the proposed algorithm is small, it is of greater importance in correcting map-matching errors at junctions and overpasses and thus ensures the algorithm's reliability, especially for safety-critical applications. Moreover, experimental results indicate that the average computational time of the proposed algorithm is under 0·15 seconds which is considered acceptable for real-time map-matching processes with 1 Hz vehicle positioning data. However, the ADAS height data is not suitable for real-time map-matching processes, due to excessive computational time.
It should be noted that the real-time performance of the proposed map-matching algorithm needs to be tested under real-world traffic conditions. More effort is still required to develop a functional prototype for the desired wrong-way driver detection system in a hard real-time environment under strict temporal constraints. To avoid consuming excessive computational time used for performing a lookup in large database tables, the data structure of the ADAS attribute tables must be optimised and this also represents future work.
ACKNOWLEDGEMENTS
This work results from the research project Ghosthunter which is granted by the German Federal Ministry for Economic Affairs and Energy (BMWi) and the German Aerospace Centre (DLR) under grant number 50 NA 1524. The authors gratefully acknowledge the cooperation with the Institute of Space Technology and Space Applications at the University of the Federal Armed Forces Munich in this project.












