



1 Introduction
Pele’s hair, which are thin strands of volcanic glass formed in the air during the fountaining of molten lava, is an impressive example of the stretching ability of highly viscous fluids. Named after Pele, the Hawaiian goddess of volcanoes, a single strand with a diameter of less than 0.5 mm can extend up to a length of  $2~\text{m}$ (Shimozuru Reference Shimozuru1994; Eggers & Villermaux Reference Eggers and Villermaux2008). If such viscous strands are pinned at one end, as in the case of honey dripping from a spoon under its own weight, gravity acts as the stretching tool for the viscous fluid, producing very thin and stable liquid threads (Senchenko & Bohr Reference Senchenko and Bohr2005; Javadi et al. Reference Javadi, Eggers, Bonn, Habibi and Ribe2013). The cross-section of such threads varies continually as the jet accelerates downstream in the direction of gravity, before breaking into drops.
$2~\text{m}$ (Shimozuru Reference Shimozuru1994; Eggers & Villermaux Reference Eggers and Villermaux2008). If such viscous strands are pinned at one end, as in the case of honey dripping from a spoon under its own weight, gravity acts as the stretching tool for the viscous fluid, producing very thin and stable liquid threads (Senchenko & Bohr Reference Senchenko and Bohr2005; Javadi et al. Reference Javadi, Eggers, Bonn, Habibi and Ribe2013). The cross-section of such threads varies continually as the jet accelerates downstream in the direction of gravity, before breaking into drops.
Physically, the breakup of the jet into drops begins with the excitation of a suitable temporally or spatially amplifying mode due to weak external disturbances. In practice, this weak agitation is usually imposed by a controlled harmonic perturbation, either from within or at the outlet of the nozzle, to generate spatially amplifying waves leading to jet breakup. In this direction, the primary objective of this paper is to evaluate the response of an incompressible jet, falling in the presence of gravity, to externally imposed harmonic perturbations characterised by a fixed frequency and amplitude, and to find the optimal forcing that generates the most amplified response.
The external forcing is vital in the production of controlled micrometre-sized droplets, a feature essential to several application as in inkjet printers (Basaran Reference Basaran2002; Wijshoff Reference Wijshoff2010; Basaran, Gao & Bhat Reference Basaran, Gao and Bhat2013), pharmaceuticals (Bennett et al. Reference Bennett, Brown, Zeman, Hu, Scheuch and Sommerer2002) and powder technology (van Deventer, Houben & Koldeweij Reference van Deventer, Houben and Koldeweij2013), to name but a few. In view of the limitations linked to the fabrication of such small droplets, most of the devices used for the production of drops depend on the generation of very thin liquid threads whose diameters are several orders of magnitude smaller than the nozzle diameter. Some common methods for producing such threads use tangential electrical stresses (in electrospinning devices (Doshi & Reneker Reference Doshi and Reneker1995; Loscertales et al. Reference Loscertales, Barrero, Guerrero, Cortijo, Marquez and Ganan-Calvo2002)), outer co-flows (Marín, Campo-Cortés & Gordillo Reference Marín, Campo-Cortés and Gordillo2009) or a rotating spinneret (in fibre spinning applications (Pearson & Matovich Reference Pearson and Matovich1969)). Rubio-Rubio, Sevilla & Gordillo (Reference Rubio-Rubio, Sevilla and Gordillo2013) showed an alternative method for producing highly elongated jets through the use of gravity, in which the mass conservation of the liquid jet forces its thinning as the liquid accelerates downstream.
The breakup of a liquid thread into drops, governed by the relative strength of the surface tension effect over the viscous and inertial effects, was first explained by Plateau (Reference Plateau1873) and Rayleigh (Reference Rayleigh1879) for a uniform column of fluid. What adds complexity to the well-understood viscous jet breakup mechanism is the presence of gravity, which significantly stretches the base flow shape. The stability of the such spatially varying gravity jets should ideally be examined using global stability analysis and by including the non-parallel effects of the base flow. A similar difficulty linked to the non-parallel nature of the flow results from the adaptation of the flow from a wall-bounded flow within the nozzle to a free jet (Sevilla Reference Sevilla2011). Turning back to falling jets stretched by gravity, Le Dizès (Reference Le Dizès1997) and later on Sauter & Buggisch (Reference Sauter and Buggisch2005) were among the first to approach the problem theoretically by defining a linear global mode that correlated with the self-sustained oscillations of the falling jet, observed during the jetting (globally stable) to dripping (globally unstable) transition. The work of Sauter & Buggisch (Reference Sauter and Buggisch2005) was extended by Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013) experimentally and theoretically by increasing the range of liquid viscosities and nozzle diameters. Additionally they retained the entire expression of the curvature term for the formulation of their stability analysis, a feature that helped them to accurately predict the critical flow rate for the stability transition and the oscillating mode compared to the previous authors. However, none of these studies predicted the jet stable length as a function of the flow rate and fluid properties, a question that was pursued by Javadi et al. (Reference Javadi, Eggers, Bonn, Habibi and Ribe2013) experimentally and theoretically.
More recently, Le Dizès & Villermaux (Reference Le Dizès and Villermaux2017) determined theoretically the stable jet length, wavelength at breakup and resulting drop size due to the most dangerous perturbation either applied at the nozzle exit or affecting the jet all along its length for different jet viscosities. Their analysis accounted for both the base-state deformation and modification of local instability dispersion relation as the jet thins in the direction of gravity. Notably, extending the work of previous authors (Tomotika Reference Tomotika1936; Frankel & Weihs Reference Frankel and Weihs1985; Leib & Goldstein Reference Leib and Goldstein1986; Frankel & Weihs Reference Frankel and Weihs1987; Sauter & Buggisch Reference Sauter and Buggisch2005; Senchenko & Bohr Reference Senchenko and Bohr2005; Javadi et al. Reference Javadi, Eggers, Bonn, Habibi and Ribe2013) they used the local plane-wave decomposition – the WKBJ (Wentzel–Kramers–Brillouin–Jeffreys) approximation – for their analysis. It is important to note that the perturbation gain definitions used by Le Dizès & Villermaux (Reference Le Dizès and Villermaux2017) and Javadi et al. (Reference Javadi, Eggers, Bonn, Habibi and Ribe2013) were different. Le Dizès & Villermaux (Reference Le Dizès and Villermaux2017) defined the gain as the exponential of the spatial growth rate, whereas Javadi et al. (Reference Javadi, Eggers, Bonn, Habibi and Ribe2013) expressed the gain using the exponential of the temporal growth rate. Additionally, Le Dizès & Villermaux (Reference Le Dizès and Villermaux2017) computed the resulting gain from a perturbation by considering only the exponential  $(\text{e})$ terms of the WKBJ approximation. Finally, an ad hoc spatial gain of
$(\text{e})$ terms of the WKBJ approximation. Finally, an ad hoc spatial gain of  $\text{e}^{7}$ of the linear perturbations was assumed to be sufficient for breakup. Thus the level of noise was considered fixed for all the theoretical analysis.
$\text{e}^{7}$ of the linear perturbations was assumed to be sufficient for breakup. Thus the level of noise was considered fixed for all the theoretical analysis.
For non-parallel flows other than the free interface jet under gravity, the successful implementation of the WKBJ approximation has been performed by Gaster, Kit & Wygnanski (Reference Gaster, Kit and Wygnanski1985), Huerre & Rossi (Reference Huerre and Rossi1998) and Viola, Arratia & Gallaire (Reference Viola, Arratia and Gallaire2016), among others, for analysing the dominant frequency selection mechanism in shear layers and trailing vortices. In the latter reference, an excellent agreement was observed between the WKBJ approach and a so-called resolvent analysis, which consists in determining the optimal time-periodic forcing that maximises the permanent response norm. In other words, it consists in maximising the transfer function norm (Trefethen et al. Reference Trefethen, Trefethen, Reddy and Driscoll1993) for each frequency. This method was first applied to parallel flows characterised by a non-normal linearised stability operator, like plane Couette or plane Poiseuille flow (see Schmid & Henningson Reference Schmid and Henningson1994), and later to non-parallel flows (Åkervik et al. Reference Åkervik, Ehrenstein, Gallaire and Henningson2008; Alizard, Cherubini & Robinet Reference Alizard, Cherubini and Robinet2009; Nichols & Lele Reference Nichols and Lele2010). The principal aspect of the resolvent analysis lies in its ability to capture the entire non-normal flow behaviour by evaluating the resolvent norm directly from the linearised Navier–Stokes operator (Marquet & Sipp Reference Marquet and Sipp2010; Monokrousos et al. Reference Monokrousos, Åkervik, Brandt and Henningson2010; Nichols & Lele Reference Nichols and Lele2011; Sipp & Marquet Reference Sipp and Marquet2013; Boujo & Gallaire Reference Boujo and Gallaire2015). Following a similar approach, Garnaud et al. (Reference Garnaud, Lesshafft, Schmid and Huerre2013) provided the preferred frequency selection and the associated spatial structures for non-parallel jet flows.
In this paper, we go beyond the global stability analysis of the gravity jets, and always operate in the stable regime where the jet behaves inherently as an amplifier. Precisely, we look at the receptivity of the jet in this regime to external perturbations, through nonlinear simulations and resolvent analysis, with the aim of finding the optimal forcing that results in the most amplified disturbance. We consider an external forcing characterised by different amplitudes. The effect of forcing amplitude on the breakup length of very high-speed jets has been numerically analysed by Hilbing & Heister (Reference Hilbing and Heister1996). However, a clear understanding of its effect in the case of spatially varying jets is still missing. Our analysis exemplifies the effect of forcing amplitude on the breakup length and the optimal forcing frequency. We also investigate the jet response using the WKBJ approximation and assess its validity for the spatially varying gravity jet. Our entire study is based on the slender-jet approximation (Eggers & Dupont Reference Eggers and Dupont1994) of the Navier–Stokes equation for an axisymmetric jet. The reduced one-dimensional (1-D) model has turned out to be extremely valuable for the realistic representation of jets (Ambravaneswaran, Wilkes & Basaran Reference Ambravaneswaran, Wilkes and Basaran2002; van Hoeve et al. Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010) by accurately capturing the jet interface close to the breakup as well as the formation of ‘satellite’ drops. These equations are similar to the 1-D models for slender axisymmetric viscous liquid jets of García & Castellanos (Reference García and Castellanos1994), who deduced not only the same leading-order 1-D equations, but also higher-order equations like the parabolic and averaged 1-D models. During the final stage of this work, we became aware of the work of Consoli-Lizzi, Coenen & Sevilla (Reference Consoli-Lizzi, Coenen and Sevilla2014), which is further detailed in Consoli-Lizzi (Reference Consoli-Lizzi2016). With an identical aim to ours, the authors compared a linear response analysis to experimental results of forced and unforced jets. In particular, their global response frequency analysis revealed the dependence of the optimal frequency on the forcing amplitude (for forced jets) or on the noise level (in the case of unforced jets).
The paper is structured as follows. In § 2 we describe the governing equations. Then in § 3 we discuss the nonlinear simulations where the results are detailed in § 3.3. The local stability analysis of the gravity jet is performed in § 4, where we compare the jet response using stability analysis in § 4.3 and the WKBJ formulation in § 4.4. We then operate in the global framework in § 5, where the significance of the resolvent analysis is elucidated in § 5.2. We show that the resolvent analysis is self-sufficient in predicting the optimal forcing frequency and the breakup length as obtained through the nonlinear simulations. Finally, we apply a white-noise disturbance on the jet inlet to explore its behaviour in comparison to the expected response to the optimal forcing in § 6. The conclusion and some perspectives related to the present work are summarised in § 7.
2 Mathematical formulation
We consider an axisymmetric viscous jet falling vertically from a nozzle under the effect of gravity  $g$. At the nozzle outlet, the jet has a fixed radius
$g$. At the nozzle outlet, the jet has a fixed radius  $\bar{h}_{0}$ and velocity
$\bar{h}_{0}$ and velocity  $\bar{u}_{0}$. The surrounding medium is considered evanescent and is neglected. The density, dynamic viscosity and surface tension of the jet are denoted by
$\bar{u}_{0}$. The surrounding medium is considered evanescent and is neglected. The density, dynamic viscosity and surface tension of the jet are denoted by  $\unicode[STIX]{x1D70C}$,
$\unicode[STIX]{x1D70C}$,  $\unicode[STIX]{x1D707}$ and
$\unicode[STIX]{x1D707}$ and  $\unicode[STIX]{x1D6FE}$, respectively.
$\unicode[STIX]{x1D6FE}$, respectively.
The behaviour of the jet is analysed using the leading-order 1-D mass and momentum equations, derived by Eggers & Dupont (Reference Eggers and Dupont1994). The dimensionless form of the equations, obtained by choosing  $\bar{h}_{0}$ as the characteristic length scale, the inertial time
$\bar{h}_{0}$ as the characteristic length scale, the inertial time  $\unicode[STIX]{x1D70F}_{i}=(\unicode[STIX]{x1D70C}\bar{h}_{0}^{3}/\unicode[STIX]{x1D6FE})^{1/2}$ as the characteristic time scale and
$\unicode[STIX]{x1D70F}_{i}=(\unicode[STIX]{x1D70C}\bar{h}_{0}^{3}/\unicode[STIX]{x1D6FE})^{1/2}$ as the characteristic time scale and  $\unicode[STIX]{x1D6FE}/\bar{h}_{0}^{2}$ as the pressure scale, are written as
$\unicode[STIX]{x1D6FE}/\bar{h}_{0}^{2}$ as the pressure scale, are written as
 $$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}t}=-\frac{1}{2h}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}(h^{2}u), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}t}=-\frac{1}{2h}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}(h^{2}u), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}t}=-u\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}-\frac{\unicode[STIX]{x2202}p}{\unicode[STIX]{x2202}z}+3Oh_{in}\left(2\frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}z}\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}\frac{1}{h}+\frac{\unicode[STIX]{x2202}^{2}u}{\unicode[STIX]{x2202}z^{2}}\right)+Bo_{in}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}t}=-u\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}-\frac{\unicode[STIX]{x2202}p}{\unicode[STIX]{x2202}z}+3Oh_{in}\left(2\frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}z}\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}\frac{1}{h}+\frac{\unicode[STIX]{x2202}^{2}u}{\unicode[STIX]{x2202}z^{2}}\right)+Bo_{in}, & \displaystyle\end{eqnarray}$$ $p(z,t)$ is expressed as
$p(z,t)$ is expressed as  $$\begin{eqnarray}p=\left(\frac{1}{\displaystyle h\left[1+\left(\frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}z}\right)^{2}\right]^{1/2}}-\frac{\displaystyle \frac{\unicode[STIX]{x2202}^{2}h}{\unicode[STIX]{x2202}z^{2}}}{\displaystyle \left[1+\left(\frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}z}\right)^{2}\right]^{3/2}}\right).\end{eqnarray}$$
$$\begin{eqnarray}p=\left(\frac{1}{\displaystyle h\left[1+\left(\frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}z}\right)^{2}\right]^{1/2}}-\frac{\displaystyle \frac{\unicode[STIX]{x2202}^{2}h}{\unicode[STIX]{x2202}z^{2}}}{\displaystyle \left[1+\left(\frac{\unicode[STIX]{x2202}h}{\unicode[STIX]{x2202}z}\right)^{2}\right]^{3/2}}\right).\end{eqnarray}$$ In (2.1),  $h(z,t)$ and
$h(z,t)$ and  $u(z,t)$ represent the radius of the jet interface and the velocity at the axial distance
$u(z,t)$ represent the radius of the jet interface and the velocity at the axial distance  $z$. The system of equations (2.1) are governed by the dimensionless Ohnesorge (
$z$. The system of equations (2.1) are governed by the dimensionless Ohnesorge ( $Oh_{in}$) and Bond (
$Oh_{in}$) and Bond ( $Bo_{in}$) numbers defined at the inlet. The Ohnesorge number, expressed as
$Bo_{in}$) numbers defined at the inlet. The Ohnesorge number, expressed as  $Oh_{in}=\unicode[STIX]{x1D707}/(\unicode[STIX]{x1D70C}\unicode[STIX]{x1D6FE}\bar{h}_{0})^{1/2}$, relates the viscous forces to inertial and surface tension forces. The Bond (Eötvös) number, denoted by
$Oh_{in}=\unicode[STIX]{x1D707}/(\unicode[STIX]{x1D70C}\unicode[STIX]{x1D6FE}\bar{h}_{0})^{1/2}$, relates the viscous forces to inertial and surface tension forces. The Bond (Eötvös) number, denoted by  $Bo_{in}=\unicode[STIX]{x1D70C}g{\bar{h}_{0}}^{2}/\unicode[STIX]{x1D6FE}$, measures the strength of the surface tension forces to body forces. A high
$Bo_{in}=\unicode[STIX]{x1D70C}g{\bar{h}_{0}}^{2}/\unicode[STIX]{x1D6FE}$, measures the strength of the surface tension forces to body forces. A high  $Oh_{in}$ or
$Oh_{in}$ or  $Bo_{in}$ leads to a stabilised jet interface, thus increasing the stability of the base flow.
$Bo_{in}$ leads to a stabilised jet interface, thus increasing the stability of the base flow.
Using the associated characteristic velocity  $\bar{h}_{0}/\unicode[STIX]{x1D70F}_{i}$, the non-dimensional boundary conditions for the jet at nozzle inlet are reduced to
$\bar{h}_{0}/\unicode[STIX]{x1D70F}_{i}$, the non-dimensional boundary conditions for the jet at nozzle inlet are reduced to
 $$\begin{eqnarray}\displaystyle & \displaystyle h(0,t)=1, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle h(0,t)=1, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle u(0,t)=\sqrt{We_{in}}. & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle u(0,t)=\sqrt{We_{in}}. & \displaystyle\end{eqnarray}$$ $We_{in}$ represents the Weber number defined at the nozzle inlet,
$We_{in}$ represents the Weber number defined at the nozzle inlet,  $We_{in}=\unicode[STIX]{x1D70C}\bar{h}_{0}\bar{u}_{0}^{2}/\unicode[STIX]{x1D6FE}$, and measures the ratio between the kinetic energy and the surface energy.
$We_{in}=\unicode[STIX]{x1D70C}\bar{h}_{0}\bar{u}_{0}^{2}/\unicode[STIX]{x1D6FE}$, and measures the ratio between the kinetic energy and the surface energy. The steady-state form of the continuity equation (2.1a) gives the relation between the steady-state shape  $h_{b}$ and velocity
$h_{b}$ and velocity  $u_{b}$ as
$u_{b}$ as
 $$\begin{eqnarray}h_{b}^{2}u_{b}=Q=\sqrt{We_{in}},\end{eqnarray}$$
$$\begin{eqnarray}h_{b}^{2}u_{b}=Q=\sqrt{We_{in}},\end{eqnarray}$$ where  $Q$ is the dimensionless flow rate, obtained from the nozzle conditions. This gives
$Q$ is the dimensionless flow rate, obtained from the nozzle conditions. This gives  $u_{b}=\sqrt{We_{in}}/h_{b}^{2}$. Using the relation (2.4), the steady-state momentum equation (2.1b) reduces to
$u_{b}=\sqrt{We_{in}}/h_{b}^{2}$. Using the relation (2.4), the steady-state momentum equation (2.1b) reduces to
 $$\begin{eqnarray}2Q^{2}h_{b}^{\prime }-h_{b}^{5}C^{\prime }+6QOh_{in}(h_{b}{h_{b}^{\prime }}^{2}-h_{b}^{2}h_{b}^{\prime \prime })+h_{b}^{5}Bo_{in}=0,\end{eqnarray}$$
$$\begin{eqnarray}2Q^{2}h_{b}^{\prime }-h_{b}^{5}C^{\prime }+6QOh_{in}(h_{b}{h_{b}^{\prime }}^{2}-h_{b}^{2}h_{b}^{\prime \prime })+h_{b}^{5}Bo_{in}=0,\end{eqnarray}$$ where derivatives are with respect to  $z$ and
$z$ and  $C$ is the jet interfacial curvature, expressed as
$C$ is the jet interfacial curvature, expressed as
 $$\begin{eqnarray}-h_{b}^{2}C^{\prime }=\frac{h_{b}^{\prime }}{[1+(h_{b}^{\prime })^{2}]^{1/2}}+\frac{h_{b}h_{b}^{\prime }h_{b}^{\prime \prime }+h_{b}^{2}h_{b}^{\prime \prime \prime }}{[1+(h_{b}^{\prime })^{2}]^{3/2}}-\frac{3h_{b}^{2}h_{b}^{\prime }(h_{b}^{\prime \prime })^{2}}{[1+(h_{b}^{\prime })^{2}]^{5/2}}.\end{eqnarray}$$
$$\begin{eqnarray}-h_{b}^{2}C^{\prime }=\frac{h_{b}^{\prime }}{[1+(h_{b}^{\prime })^{2}]^{1/2}}+\frac{h_{b}h_{b}^{\prime }h_{b}^{\prime \prime }+h_{b}^{2}h_{b}^{\prime \prime \prime }}{[1+(h_{b}^{\prime })^{2}]^{3/2}}-\frac{3h_{b}^{2}h_{b}^{\prime }(h_{b}^{\prime \prime })^{2}}{[1+(h_{b}^{\prime })^{2}]^{5/2}}.\end{eqnarray}$$ For the fixed nozzle inlet, equation (2.5) is subject to boundary condition  $h_{b}=1$ at
$h_{b}=1$ at  $z=0$. Two more boundary conditions are needed to well define this differential problem of order three. However, exempting the jet tip from the base flow calculation gives us the liberty to impose a constant slope (
$z=0$. Two more boundary conditions are needed to well define this differential problem of order three. However, exempting the jet tip from the base flow calculation gives us the liberty to impose a constant slope ( $h_{b}^{\prime }=0$) and curvature (
$h_{b}^{\prime }=0$) and curvature ( $h_{b}^{\prime \prime }=0$) at the exit of the jet. It should be noted that the boundary conditions applied at the jet exit should be treated as a way to close the differential problem rather than depicting physical boundary conditions. We made sure that these boundary conditions did not impact the overall base-state solution by computing the solution over a large enough domain where the base-state solution naturally converges to a solution with
$h_{b}^{\prime \prime }=0$) at the exit of the jet. It should be noted that the boundary conditions applied at the jet exit should be treated as a way to close the differential problem rather than depicting physical boundary conditions. We made sure that these boundary conditions did not impact the overall base-state solution by computing the solution over a large enough domain where the base-state solution naturally converges to a solution with  $h_{b}^{\prime }=0$ and
$h_{b}^{\prime }=0$ and  $h_{b}^{\prime \prime }=0$.
$h_{b}^{\prime \prime }=0$.
3 Nonlinear simulations
The strength of a nonlinear simulation lies in its ability to capture the exact response of the jet interface, including the shape close to the breakup point where the interface radius  $h$ approaches a zero value. Often, the external forcing does not result in the breakup of fixed-sized drops; rather the regular-sized drops are followed by much smaller ‘satellite drops’.
$h$ approaches a zero value. Often, the external forcing does not result in the breakup of fixed-sized drops; rather the regular-sized drops are followed by much smaller ‘satellite drops’.
Keeping this in view, we analyse the response of the jet in the presence of an external forcing. We aim to find the optimal forcing that results in the most unstable jet. The breakup length, which is the length of the stable jet between the nozzle and the breakup point, is chosen as the quantifier to compare the effect of different forcings, with the optimal forcing resulting in the shortest possible breakup length.
We begin with the description of the modified nonlinear governing equations used for the simulations, followed by the numerical scheme implemented to capture jet breakup. Finally, we present the comparison of breakup characteristics of the jet for different inlet forcings.
3.1 Governing equations
In order to remove the singularity in expression (2.2) for the pressure, when  $h(z,t)\rightarrow 0$, we define the interface radius
$h(z,t)\rightarrow 0$, we define the interface radius  $h(z,t)$ in terms of the function
$h(z,t)$ in terms of the function  $a(z,t)$ where
$a(z,t)$ where  $a=h^{2}$. The governing equations (2.1) thus transform into
$a=h^{2}$. The governing equations (2.1) thus transform into
 $$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}a}{\unicode[STIX]{x2202}t}=-\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}(au), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}a}{\unicode[STIX]{x2202}t}=-\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}(au), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}t}=-u\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}-\frac{\unicode[STIX]{x2202}p}{\unicode[STIX]{x2202}z}+3Oh_{in}\left(\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}\left(a\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}\right)\frac{1}{a}\right)+Bo_{in}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}t}=-u\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}-\frac{\unicode[STIX]{x2202}p}{\unicode[STIX]{x2202}z}+3Oh_{in}\left(\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}\left(a\frac{\unicode[STIX]{x2202}u}{\unicode[STIX]{x2202}z}\right)\frac{1}{a}\right)+Bo_{in}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle p=\left(\frac{\displaystyle \left(2-\frac{\unicode[STIX]{x2202}^{2}a}{\unicode[STIX]{x2202}z^{2}}\right)a+\left(\frac{\unicode[STIX]{x2202}a}{\unicode[STIX]{x2202}z}\right)^{2}}{\displaystyle 2\left(\frac{1}{4}\left(\frac{\unicode[STIX]{x2202}a}{\unicode[STIX]{x2202}z}\right)^{2}+a\right)^{3/2}}\right). & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle p=\left(\frac{\displaystyle \left(2-\frac{\unicode[STIX]{x2202}^{2}a}{\unicode[STIX]{x2202}z^{2}}\right)a+\left(\frac{\unicode[STIX]{x2202}a}{\unicode[STIX]{x2202}z}\right)^{2}}{\displaystyle 2\left(\frac{1}{4}\left(\frac{\unicode[STIX]{x2202}a}{\unicode[STIX]{x2202}z}\right)^{2}+a\right)^{3/2}}\right). & \displaystyle\end{eqnarray}$$ $(a_{b}=h_{b}^{2})$ is obtained by solving (2.5). We model the external forcing on the jet by perturbing only the inlet velocity using a forcing of the form
$(a_{b}=h_{b}^{2})$ is obtained by solving (2.5). We model the external forcing on the jet by perturbing only the inlet velocity using a forcing of the form  $$\begin{eqnarray}u_{f}(0,t)=\text{Re}(\unicode[STIX]{x1D716}\text{e}^{\text{i}\unicode[STIX]{x1D714}t}),\end{eqnarray}$$
$$\begin{eqnarray}u_{f}(0,t)=\text{Re}(\unicode[STIX]{x1D716}\text{e}^{\text{i}\unicode[STIX]{x1D714}t}),\end{eqnarray}$$ where  $\unicode[STIX]{x1D716}$ represents the amplitude of the forcing and
$\unicode[STIX]{x1D716}$ represents the amplitude of the forcing and  $\unicode[STIX]{x1D714}$ represents the angular forcing frequency. In the presence of the forcing, the boundary conditions at the inlet are modified to
$\unicode[STIX]{x1D714}$ represents the angular forcing frequency. In the presence of the forcing, the boundary conditions at the inlet are modified to  $a(0,t)=1$ and
$a(0,t)=1$ and  $u(0,t)=\sqrt{We_{in}}+u_{f}$. No boundary conditions are defined at the other extremity of the domain close to the tip. Nonetheless, a special treatment is applied for the tip, as explained in the next section.
$u(0,t)=\sqrt{We_{in}}+u_{f}$. No boundary conditions are defined at the other extremity of the domain close to the tip. Nonetheless, a special treatment is applied for the tip, as explained in the next section.
3.2 Numerical scheme
The governing equations (3.1) are first discretised in space, after which the resulting ordinary differential equations (ODEs) are integrated in time. Diffusion terms are evaluated using second-order finite differences, with a central scheme for intermediate nodes and a forward or backward scheme for boundary nodes. Advection terms are obtained using a weighted upwind scheme inspired by Spalding’s (Reference Spalding1972) hybrid difference scheme. Unlike the latter, which approximates the convective derivative using a combination of central and upwind schemes, we evaluate the derivative based on a combination of forward and backward finite differences. An advection term  $\text{d}A/\text{d}z$ is evaluated at node
$\text{d}A/\text{d}z$ is evaluated at node  $i$ as
$i$ as
 $$\begin{eqnarray}\left(\frac{\text{d}A}{\text{d}z}\right)_{i}=\unicode[STIX]{x1D6FD}\left(\frac{\text{d}A}{\text{d}z}\right)_{i,b}+(1-\unicode[STIX]{x1D6FD})\left(\frac{\text{d}A}{\text{d}z}\right)_{i,f},\end{eqnarray}$$
$$\begin{eqnarray}\left(\frac{\text{d}A}{\text{d}z}\right)_{i}=\unicode[STIX]{x1D6FD}\left(\frac{\text{d}A}{\text{d}z}\right)_{i,b}+(1-\unicode[STIX]{x1D6FD})\left(\frac{\text{d}A}{\text{d}z}\right)_{i,f},\end{eqnarray}$$ where indices  $b$ and
$b$ and  $f$ refer to the backward and forward finite difference schemes, and
$f$ refer to the backward and forward finite difference schemes, and  $\unicode[STIX]{x1D6FD}$ is a weight coefficient that depends on the local value of velocity
$\unicode[STIX]{x1D6FD}$ is a weight coefficient that depends on the local value of velocity  $u$ at node
$u$ at node  $i$ together with a parameter
$i$ together with a parameter  $\unicode[STIX]{x1D6FC}$:
$\unicode[STIX]{x1D6FC}$:
 $$\begin{eqnarray}\unicode[STIX]{x1D6FD}=\frac{\tanh (\unicode[STIX]{x1D6FC}u_{i})+1}{2}.\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D6FD}=\frac{\tanh (\unicode[STIX]{x1D6FC}u_{i})+1}{2}.\end{eqnarray}$$ For the range of feed velocities considered in this study, numerical stability was always ensured by using a 10-point stencil. Thus, the backward difference term relies on a stencil that spans nodes  $i-5$ to
$i-5$ to  $i+4$, and the forward difference term employs nodes
$i+4$, and the forward difference term employs nodes  $i-4$ to
$i-4$ to  $i+5$. For large enough downstream or upstream velocities,
$i+5$. For large enough downstream or upstream velocities,  $\unicode[STIX]{x1D6FD}$ will tend to
$\unicode[STIX]{x1D6FD}$ will tend to  $1$ or
$1$ or  $0$, respectively; hence (3.3) reduces to a regular upwind difference scheme. For smaller velocity magnitudes in between, (3.3) produces a weighted combination of backward and forward differences. In our simulations, we choose
$0$, respectively; hence (3.3) reduces to a regular upwind difference scheme. For smaller velocity magnitudes in between, (3.3) produces a weighted combination of backward and forward differences. In our simulations, we choose  $\unicode[STIX]{x1D6FC}=50$ so that the transition between the backward and forward difference schemes mostly occurs when
$\unicode[STIX]{x1D6FC}=50$ so that the transition between the backward and forward difference schemes mostly occurs when  $|u|<0.05$. Finally, advection terms at nodes close to the boundary are evaluated based on the values of the closest nine adjoining nodes.
$|u|<0.05$. Finally, advection terms at nodes close to the boundary are evaluated based on the values of the closest nine adjoining nodes.
After obtaining all spatial derivatives, the resulting ODEs are integrated using the MATLAB solver ode23tb, which implements a trapezoidal rule and a backward differentiation formula known as TR-BDF2 (Bank et al. Reference Bank, Coughran, Fichtner, Grosse, Rose and Smith1985), and uses a variable time step to reduce the overall simulation time.
The numerical domain  $L$ is taken sufficiently large to capture the breakup of the jet. The jet interface is initialised by the solution of (2.5) obtained numerically with the MATLAB bvp4c solver. The corresponding velocity at each axial location is then obtained by equating the interface radius with the constant inlet flow rate
$L$ is taken sufficiently large to capture the breakup of the jet. The jet interface is initialised by the solution of (2.5) obtained numerically with the MATLAB bvp4c solver. The corresponding velocity at each axial location is then obtained by equating the interface radius with the constant inlet flow rate  $Q$. The validation of the numerically obtained base-state solution for the jet interface is presented in § A.1. It should be noted that the jet is initialised only for a segment of the domain
$Q$. The validation of the numerically obtained base-state solution for the jet interface is presented in § A.1. It should be noted that the jet is initialised only for a segment of the domain  $L$ with the steady-state equation. For the remaining segment of the domain, both the jet radius and its velocity are initialised to zero. Defining the initial conditions with the base-state solution only for a part of the domain
$L$ with the steady-state equation. For the remaining segment of the domain, both the jet radius and its velocity are initialised to zero. Defining the initial conditions with the base-state solution only for a part of the domain  $L$ helps to reduce the computational cost without any loss in the accuracy of the results obtained. The axial span of the base-state solution does not affect the quasi-steady jet characteristics, which are the focal point of our numerical analysis. A validation for the same is presented in § A.2.
$L$ helps to reduce the computational cost without any loss in the accuracy of the results obtained. The axial span of the base-state solution does not affect the quasi-steady jet characteristics, which are the focal point of our numerical analysis. A validation for the same is presented in § A.2.
At every time step, the solution is evaluated for three conditions:
(i) Pinch-off (breakup). This is defined as when the value of
 $a$ passes below a threshold value of $10^{-5}$. The corresponding time $t_{po}$ is saved and the position of the jet tip is updated as $N_{tip}=N_{po}$, where $N_{po}$ is the pinch-off location. The solution for $a$ and $u$ beyond $N_{tip}$ is set to zero. For subsequent time steps, $N_{tip}$ has two possibilities – it can either advance or recede, which requires the following two conditions.
$a$ passes below a threshold value of $10^{-5}$. The corresponding time $t_{po}$ is saved and the position of the jet tip is updated as $N_{tip}=N_{po}$, where $N_{po}$ is the pinch-off location. The solution for $a$ and $u$ beyond $N_{tip}$ is set to zero. For subsequent time steps, $N_{tip}$ has two possibilities – it can either advance or recede, which requires the following two conditions.(ii) Advancing jet. The values of
$a$ at nodes $N_{tip}-1$ and $N_{tip}$ are extrapolated to find $a$ at $N_{tip}+1$. If the extrapolated value is larger than a predefined value of $5\times 10^{-3}$, the parameter $N_{tip}$ is incremented by 1, and $a$ and $u$ at the new $N_{tip}$ are assigned values extrapolated from its previous two neighbours.(iii) Receding jet. If the value of
$f$ at $N_{tip}$ falls below a predefined value of $10^{-3}$, $a$ and $u$ at $N_{tip}$ are set to zero and the parameter $N_{tip}$ is reduced by 1.


























These three conditions enable the numerical integration of the governing equations in a way that captures accurately the breakup of the jet and the motion of the tip. A validation of the numerical scheme is presented in § A.3.
3.3 Nonlinear simulation results
Using the numerical scheme presented in the previous section, nonlinear simulations were performed for a jet governed by (3.1) for fixed inlet characteristics:  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $We_{in}=1.75$ and
$We_{in}=1.75$ and  $Bo_{in}=0.1$. The jet inlet velocity is subjected to time-harmonic forcing of the form given by (3.2) with a fixed amplitude
$Bo_{in}=0.1$. The jet inlet velocity is subjected to time-harmonic forcing of the form given by (3.2) with a fixed amplitude  $\unicode[STIX]{x1D716}$ and for forcing frequency
$\unicode[STIX]{x1D716}$ and for forcing frequency $\unicode[STIX]{x1D714}=[0.4-3.2]$.
$\unicode[STIX]{x1D714}=[0.4-3.2]$.
The simulations were run for a sufficiently long time to enter a permanent regime wherein the jet breaks up at regular intervals of time and at fixed axial location. In the quasi-steady regime, the breakup period  $\unicode[STIX]{x0394}T_{po}$ is defined as the time difference between two consecutive breakups or pinch-offs and the breakup length
$\unicode[STIX]{x0394}T_{po}$ is defined as the time difference between two consecutive breakups or pinch-offs and the breakup length  $l_{c}$ as the stable length of the jet between the nozzle and the pinch-off location. We use
$l_{c}$ as the stable length of the jet between the nozzle and the pinch-off location. We use  $l_{c}$ as the quantifier to determine the stability of the jet to external forcing such that the most amplified disturbance caused by the optimal frequency
$l_{c}$ as the quantifier to determine the stability of the jet to external forcing such that the most amplified disturbance caused by the optimal frequency  $\unicode[STIX]{x1D714}_{opt}$ will compel the jet to have the shortest possible breakup length.
$\unicode[STIX]{x1D714}_{opt}$ will compel the jet to have the shortest possible breakup length.

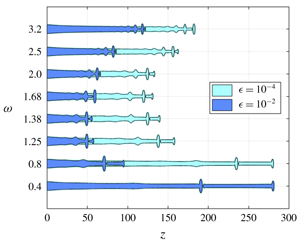
Figure 1. The jet intact shape along the axial direction  $z$ for a gravity jet defined by
$z$ for a gravity jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$ and perturbed by different inlet forcing frequencies
$We_{in}=1.75$ and perturbed by different inlet forcing frequencies  $\unicode[STIX]{x1D714}$ and forcing amplitudes
$\unicode[STIX]{x1D714}$ and forcing amplitudes  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $\unicode[STIX]{x1D716}=10^{-4}$. For clarity, only the shape corresponding to the shortest breakup length for every frequency is plotted. The forcing frequencies are in steps of
$\unicode[STIX]{x1D716}=10^{-4}$. For clarity, only the shape corresponding to the shortest breakup length for every frequency is plotted. The forcing frequencies are in steps of  $\unicode[STIX]{x1D6FF}=0.4$ except for certain intermediate ranges highlighted by the axis break symbol. The jets of two different colours represent the shape at the same forcing frequency but different forcing amplitudes
$\unicode[STIX]{x1D6FF}=0.4$ except for certain intermediate ranges highlighted by the axis break symbol. The jets of two different colours represent the shape at the same forcing frequency but different forcing amplitudes  $\unicode[STIX]{x1D716}$. We see that for
$\unicode[STIX]{x1D716}$. We see that for  $\unicode[STIX]{x1D716}=10^{-2}$ the breakup length is the minimum for
$\unicode[STIX]{x1D716}=10^{-2}$ the breakup length is the minimum for  $\unicode[STIX]{x1D714}=1.38$ and for
$\unicode[STIX]{x1D714}=1.38$ and for  $\unicode[STIX]{x1D716}=10^{-4}$ it is minimum for
$\unicode[STIX]{x1D716}=10^{-4}$ it is minimum for  $\unicode[STIX]{x1D714}=1.68$. The box in red shows the zoomed image of the jet close to a breakup, highlighting the existence of a satellite and a main drop. The zoomed image has radial
$\unicode[STIX]{x1D714}=1.68$. The box in red shows the zoomed image of the jet close to a breakup, highlighting the existence of a satellite and a main drop. The zoomed image has radial  $h$ and axial
$h$ and axial  $z$ dimensions drawn to the same scale, each representing a dimensionless size of 6. The red bar in both the plots represents a dimensionless radial length scale of 2, which is also the size of the dimensionless nozzle diameter.
$z$ dimensions drawn to the same scale, each representing a dimensionless size of 6. The red bar in both the plots represents a dimensionless radial length scale of 2, which is also the size of the dimensionless nozzle diameter.
We begin our analysis for fixed amplitudes  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $\unicode[STIX]{x1D716}=10^{-4}$. The response of the jet due to different forcing frequency
$\unicode[STIX]{x1D716}=10^{-4}$. The response of the jet due to different forcing frequency  $\unicode[STIX]{x1D714}$ in the permanent regime for the two above-mentioned amplitudes can be seen in figure 1. Jets enforced by the same disturbance amplitude at the inlet are represented by the same colour. For visual clarity we plot the response only for certain frequencies and for the jet shape pertaining to the shortest breakup length. First, figure 1 clearly shows the existence of a main drop and a satellite drop for all the frequencies. Second, for
$\unicode[STIX]{x1D714}$ in the permanent regime for the two above-mentioned amplitudes can be seen in figure 1. Jets enforced by the same disturbance amplitude at the inlet are represented by the same colour. For visual clarity we plot the response only for certain frequencies and for the jet shape pertaining to the shortest breakup length. First, figure 1 clearly shows the existence of a main drop and a satellite drop for all the frequencies. Second, for  $\unicode[STIX]{x1D716}=10^{-2}$ we conclude that the optimal forcing frequency is
$\unicode[STIX]{x1D716}=10^{-2}$ we conclude that the optimal forcing frequency is  $\unicode[STIX]{x1D714}_{opt}=1.38$ because it manifests the jet to have the shortest
$\unicode[STIX]{x1D714}_{opt}=1.38$ because it manifests the jet to have the shortest  $l_{c}$. Third, and most strikingly, we notice that for a lower forcing amplitude of
$l_{c}$. Third, and most strikingly, we notice that for a lower forcing amplitude of  $\unicode[STIX]{x1D716}=10^{-4}$, the optimal forcing increases to
$\unicode[STIX]{x1D716}=10^{-4}$, the optimal forcing increases to  $\unicode[STIX]{x1D714}_{opt}=1.68$. We would like to highlight here that a similar inverse relation between the forcing amplitude and the optimal forcing frequency for gravitationally stretched jets can also be observed through the linear response analysis results presented in Consoli-Lizzi et al. (Reference Consoli-Lizzi, Coenen and Sevilla2014) and Consoli-Lizzi (Reference Consoli-Lizzi2016). Finally, at all forcing frequencies, the breakup length for the jet with
$\unicode[STIX]{x1D714}_{opt}=1.68$. We would like to highlight here that a similar inverse relation between the forcing amplitude and the optimal forcing frequency for gravitationally stretched jets can also be observed through the linear response analysis results presented in Consoli-Lizzi et al. (Reference Consoli-Lizzi, Coenen and Sevilla2014) and Consoli-Lizzi (Reference Consoli-Lizzi2016). Finally, at all forcing frequencies, the breakup length for the jet with  $\unicode[STIX]{x1D716}=10^{-4}$ is always larger than for
$\unicode[STIX]{x1D716}=10^{-4}$ is always larger than for  $\unicode[STIX]{x1D716}=10^{-2}$.
$\unicode[STIX]{x1D716}=10^{-2}$.
To investigate further the breakup characteristics for the amplitudes  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $\unicode[STIX]{x1D716}=10^{-4}$ due to
$\unicode[STIX]{x1D716}=10^{-4}$ due to  $\unicode[STIX]{x1D714}_{opt}$, we plot the interface evolution in the permanent regime as shown in figures 2(a) and 2(c), where regular-sized main drop formation is followed by the release of a satellite drop. For both the amplitudes, we see a distinct difference between the main and satellite drop radii.
$\unicode[STIX]{x1D714}_{opt}$, we plot the interface evolution in the permanent regime as shown in figures 2(a) and 2(c), where regular-sized main drop formation is followed by the release of a satellite drop. For both the amplitudes, we see a distinct difference between the main and satellite drop radii.

Figure 2. Breakup characteristics for a gravity jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$ and perturbed with
$We_{in}=1.75$ and perturbed with  $\unicode[STIX]{x1D714}_{opt}$. Panels (a,b) correspond to a forcing with
$\unicode[STIX]{x1D714}_{opt}$. Panels (a,b) correspond to a forcing with  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $\unicode[STIX]{x1D714}_{opt}=1.38$; and panels (c,d) refer to a forcing with
$\unicode[STIX]{x1D714}_{opt}=1.38$; and panels (c,d) refer to a forcing with  $\unicode[STIX]{x1D716}=10^{-4}$ and
$\unicode[STIX]{x1D716}=10^{-4}$ and  $\unicode[STIX]{x1D714}_{opt}=1.68$. In panels (a,c) is elaborated the interface profile at the time of breakup with the existence of a satellite drop after the main drop is released. The main and satellite drop radii for both the cases have been highlighted. The axial and radial dimensions of (a,c) represent the same length scale. In panels (b,d) is represented the breakup period
$\unicode[STIX]{x1D714}_{opt}=1.68$. In panels (a,c) is elaborated the interface profile at the time of breakup with the existence of a satellite drop after the main drop is released. The main and satellite drop radii for both the cases have been highlighted. The axial and radial dimensions of (a,c) represent the same length scale. In panels (b,d) is represented the breakup period  $\unicode[STIX]{x0394}T_{po}$. The black triangles refer to
$\unicode[STIX]{x0394}T_{po}$. The black triangles refer to  $\unicode[STIX]{x0394}T_{po}$ between consecutive drops and the blue circles represent that between two consecutive main (or satellite) drops. The breakup frequency
$\unicode[STIX]{x0394}T_{po}$ between consecutive drops and the blue circles represent that between two consecutive main (or satellite) drops. The breakup frequency  $\unicode[STIX]{x1D714}_{po}$ is equal to 1.38 and 1.68 in (b,d) respectively.
$\unicode[STIX]{x1D714}_{po}$ is equal to 1.38 and 1.68 in (b,d) respectively.
The breakup period  $\unicode[STIX]{x0394}T_{po}$ resulting from the forcing imposed in figures 2(a) and 2(c) are plotted in figures 2(b) and 2(d), respectively, where the black triangles represent the
$\unicode[STIX]{x0394}T_{po}$ resulting from the forcing imposed in figures 2(a) and 2(c) are plotted in figures 2(b) and 2(d), respectively, where the black triangles represent the  $\unicode[STIX]{x0394}T_{po}$ obtained for two consecutive pinch-offs whereas the blue circles denote
$\unicode[STIX]{x0394}T_{po}$ obtained for two consecutive pinch-offs whereas the blue circles denote  $\unicode[STIX]{x0394}T_{po}$ obtained for two consecutive main (or satellite) drop pinch-offs. The latter is observed to be the same for the main and satellite drop formation (as shown in blue circles). However, the time of formation of a satellite drop does not lie exactly midway between the time of formation of the main drops and vice versa. This results in obtaining two oscillating breakup periods (as shown by the black triangles). We further observe that the frequency of breakup (
$\unicode[STIX]{x0394}T_{po}$ obtained for two consecutive main (or satellite) drop pinch-offs. The latter is observed to be the same for the main and satellite drop formation (as shown in blue circles). However, the time of formation of a satellite drop does not lie exactly midway between the time of formation of the main drops and vice versa. This results in obtaining two oscillating breakup periods (as shown by the black triangles). We further observe that the frequency of breakup ( $\unicode[STIX]{x1D714}_{po}=2\unicode[STIX]{x03C0}/\unicode[STIX]{x0394}T_{po}$) obtained using the breakup period for consecutive main (or satellite) drops responds to the externally applied forcing at the jet inlet. For forcing amplitudes
$\unicode[STIX]{x1D714}_{po}=2\unicode[STIX]{x03C0}/\unicode[STIX]{x0394}T_{po}$) obtained using the breakup period for consecutive main (or satellite) drops responds to the externally applied forcing at the jet inlet. For forcing amplitudes  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $10^{-4}$,
$10^{-4}$,  $\unicode[STIX]{x1D714}_{po}=1.38$ and
$\unicode[STIX]{x1D714}_{po}=1.38$ and  $1.68$, respectively.
$1.68$, respectively.
Finally, for the constant flow rate of the jet, the breakup period related to the consecutive pinch-offs is used to obtain the drop radius for the satellite and main drops. Note here that the definition of the main and satellite drop radii coincide with the classical definition of volume-equivalent radii. We notice that, at the optimal forcing frequency, the main drop radius  $R_{m}$ decreases from 1.62 to 1.48 dimensionless units as
$R_{m}$ decreases from 1.62 to 1.48 dimensionless units as  $\unicode[STIX]{x1D716}$ reduces from
$\unicode[STIX]{x1D716}$ reduces from  $10^{-2}$ to
$10^{-2}$ to  $10^{-4}$. On the contrary, the satellite drop radius
$10^{-4}$. On the contrary, the satellite drop radius  $R_{s}$ increases from 0.78 to 1.08 dimensionless units for
$R_{s}$ increases from 0.78 to 1.08 dimensionless units for  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $\unicode[STIX]{x1D716}=10^{-4}$, respectively. The longer intact jet length obtained for lower forcing amplitude
$\unicode[STIX]{x1D716}=10^{-4}$, respectively. The longer intact jet length obtained for lower forcing amplitude  $\unicode[STIX]{x1D716}=10^{-4}$ results in a larger downstream velocity close to the tip due to the presence of gravity. Eventually, it results in the formation of highly stretched satellite drops in comparison to the ones obtained for lower amplitude of
$\unicode[STIX]{x1D716}=10^{-4}$ results in a larger downstream velocity close to the tip due to the presence of gravity. Eventually, it results in the formation of highly stretched satellite drops in comparison to the ones obtained for lower amplitude of  $\unicode[STIX]{x1D716}=10^{-2}$ as seen in figure 2(a,c).
$\unicode[STIX]{x1D716}=10^{-2}$ as seen in figure 2(a,c).

Figure 3. The breakup length  $l_{c}$ as a function of forcing frequency
$l_{c}$ as a function of forcing frequency  $\unicode[STIX]{x1D714}$ for a gravity jet defined by
$\unicode[STIX]{x1D714}$ for a gravity jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$. Each curve is indicative of a fixed forcing amplitude
$We_{in}=1.75$. Each curve is indicative of a fixed forcing amplitude  $\unicode[STIX]{x1D716}$. For a fixed
$\unicode[STIX]{x1D716}$. For a fixed  $\unicode[STIX]{x1D716}$, the optimal forcing frequency related to the shortest
$\unicode[STIX]{x1D716}$, the optimal forcing frequency related to the shortest  $l_{c}$ is represented by a red cross. We observe that the optimal frequency increases as
$l_{c}$ is represented by a red cross. We observe that the optimal frequency increases as  $\unicode[STIX]{x1D716}$ decreases and does not appear to saturate even for lower amplitudes of
$\unicode[STIX]{x1D716}$ decreases and does not appear to saturate even for lower amplitudes of  $10^{-8}$. The black circles represent the data from numerical simulations.
$10^{-8}$. The black circles represent the data from numerical simulations.
We now return to the most salient feature observed in figure 1, where the optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}$ increased with a decrease in forcing amplitude. To explore if this effect existed for smaller amplitudes, we simulated the same system for different forcing amplitudes
$\unicode[STIX]{x1D714}_{opt}$ increased with a decrease in forcing amplitude. To explore if this effect existed for smaller amplitudes, we simulated the same system for different forcing amplitudes  $\unicode[STIX]{x1D716}=[10^{-2}{-}10^{-8}]$, and plotted the breakup length
$\unicode[STIX]{x1D716}=[10^{-2}{-}10^{-8}]$, and plotted the breakup length  $l_{c}$ as a function of the forcing frequency
$l_{c}$ as a function of the forcing frequency  $\unicode[STIX]{x1D714}$ as shown in figure 3, where the optimal forcing frequency for a fixed
$\unicode[STIX]{x1D714}$ as shown in figure 3, where the optimal forcing frequency for a fixed  $\unicode[STIX]{x1D716}$ is marked with a red cross. The results show an increase in
$\unicode[STIX]{x1D716}$ is marked with a red cross. The results show an increase in  $l_{c}$ and
$l_{c}$ and  $\unicode[STIX]{x1D714}_{opt}$ as
$\unicode[STIX]{x1D714}_{opt}$ as  $\unicode[STIX]{x1D716}$ decreases, which is in qualitative agreement with the linear response analysis results presented in Consoli-Lizzi (Reference Consoli-Lizzi2016). The increase in breakup length is obvious due to the decreasing destabilising strength of the forcing amplitude. The increase in optimal forcing frequency, however, is the most interesting observation drawn from the numerical results, since it is expected to saturate for small enough forcing amplitudes. The increase in
$\unicode[STIX]{x1D716}$ decreases, which is in qualitative agreement with the linear response analysis results presented in Consoli-Lizzi (Reference Consoli-Lizzi2016). The increase in breakup length is obvious due to the decreasing destabilising strength of the forcing amplitude. The increase in optimal forcing frequency, however, is the most interesting observation drawn from the numerical results, since it is expected to saturate for small enough forcing amplitudes. The increase in  $\unicode[STIX]{x1D714}_{opt}$ as
$\unicode[STIX]{x1D714}_{opt}$ as  $\unicode[STIX]{x1D716}$ decreases from
$\unicode[STIX]{x1D716}$ decreases from  $10^{-2}$ to
$10^{-2}$ to  $10^{-8}$ is a consequence of the stretched base state due to gravity, which results in the downstream stretching of the perturbation wavelength initiated at the nozzle. As the forcing amplitude decreases, the stable jet length
$10^{-8}$ is a consequence of the stretched base state due to gravity, which results in the downstream stretching of the perturbation wavelength initiated at the nozzle. As the forcing amplitude decreases, the stable jet length  $l_{c}$ increases and so does the stretching close to the jet tip. Thus to compensate for the larger stretching, the breakup potential of the forcing is sustained by increasing the forcing frequency.
$l_{c}$ increases and so does the stretching close to the jet tip. Thus to compensate for the larger stretching, the breakup potential of the forcing is sustained by increasing the forcing frequency.
To conclude, the numerical simulations confirm the dependence of  $\unicode[STIX]{x1D714}_{opt}$ on the forcing amplitude, a factor generally neglected for linear stability analysis as long as
$\unicode[STIX]{x1D714}_{opt}$ on the forcing amplitude, a factor generally neglected for linear stability analysis as long as  $\unicode[STIX]{x1D716}\ll 1$. The trend also constitutes a major difference from a jet with no gravity effect (
$\unicode[STIX]{x1D716}\ll 1$. The trend also constitutes a major difference from a jet with no gravity effect ( $Bo_{in}=0$), where
$Bo_{in}=0$), where  $\unicode[STIX]{x1D714}_{opt}$ is independent of
$\unicode[STIX]{x1D714}_{opt}$ is independent of  $\unicode[STIX]{x1D716}$ (see figure 20 in § A.4). Finally, we confirm that the preferred-mode analysis carried out for the jet is solely due to the effect of external forcing. For the given parameter range, the jet tip did not induce any self-sustained breakups.
$\unicode[STIX]{x1D716}$ (see figure 20 in § A.4). Finally, we confirm that the preferred-mode analysis carried out for the jet is solely due to the effect of external forcing. For the given parameter range, the jet tip did not induce any self-sustained breakups.
4 Local stability analysis
The linear stability theory is applicable for small forcing amplitudes ( $\unicode[STIX]{x1D716}\ll 1$) and does not take into account its absolute value, a parameter that has already been shown in § 3.3 to influence the optimal forcing frequency. Nevertheless, we begin our analysis in the local framework by first obtaining the dispersion relation for parallel viscous jets in the absence of gravity, which is used as a basis for obtaining the absolute–convective instability transition criteria in § 4.2. Next, the dispersion relation for parallel jets is suitably modified to include the spatial variation of the gravitationally stretched base flow and the spatial stability of the jet is performed in § 4.3. Since the base state is spatially evolving, we extend our stability analysis using the WKBJ formulation in § 4.4.
$\unicode[STIX]{x1D716}\ll 1$) and does not take into account its absolute value, a parameter that has already been shown in § 3.3 to influence the optimal forcing frequency. Nevertheless, we begin our analysis in the local framework by first obtaining the dispersion relation for parallel viscous jets in the absence of gravity, which is used as a basis for obtaining the absolute–convective instability transition criteria in § 4.2. Next, the dispersion relation for parallel jets is suitably modified to include the spatial variation of the gravitationally stretched base flow and the spatial stability of the jet is performed in § 4.3. Since the base state is spatially evolving, we extend our stability analysis using the WKBJ formulation in § 4.4.
4.1 Local stability analysis for jets in the absence of gravity
We derive the dispersion relation for the coupled equations (2.1), governing the growth of small perturbations about the base state. Considering the normal-mode expansion, the flow variables  $h(z,t)$ and
$h(z,t)$ and  $u(z,t)$ are decomposed as
$u(z,t)$ are decomposed as
 $$\begin{eqnarray}\displaystyle & \displaystyle h(z,t)=h_{b}+\unicode[STIX]{x1D716}{\hat{h}}\text{e}^{\text{i}(kz-\unicode[STIX]{x1D714}t)}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle h(z,t)=h_{b}+\unicode[STIX]{x1D716}{\hat{h}}\text{e}^{\text{i}(kz-\unicode[STIX]{x1D714}t)}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle u(z,t)=u_{b}+\unicode[STIX]{x1D716}\hat{u} \text{e}^{\text{i}(kz-\unicode[STIX]{x1D714}t)}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle u(z,t)=u_{b}+\unicode[STIX]{x1D716}\hat{u} \text{e}^{\text{i}(kz-\unicode[STIX]{x1D714}t)}, & \displaystyle\end{eqnarray}$$ $\unicode[STIX]{x1D716}\ll 1$, with
$\unicode[STIX]{x1D716}\ll 1$, with  ${\hat{h}}$ and
${\hat{h}}$ and  $\hat{u}$ as complex constants, and where
$\hat{u}$ as complex constants, and where  $k$ and
$k$ and  $\unicode[STIX]{x1D714}$ are, respectively, the dimensionless spatial wavenumber and the temporal frequency, which may both be complex. Similarly, for the variable representing the square of interface,
$\unicode[STIX]{x1D714}$ are, respectively, the dimensionless spatial wavenumber and the temporal frequency, which may both be complex. Similarly, for the variable representing the square of interface,  $a(z,t)$ is decomposed as
$a(z,t)$ is decomposed as  $$\begin{eqnarray}a(z,t)=a_{b}+\unicode[STIX]{x1D716}\hat{a}\text{e}^{\text{i}(kz-\unicode[STIX]{x1D714}t)},\end{eqnarray}$$
$$\begin{eqnarray}a(z,t)=a_{b}+\unicode[STIX]{x1D716}\hat{a}\text{e}^{\text{i}(kz-\unicode[STIX]{x1D714}t)},\end{eqnarray}$$ where  $a_{b}=h_{b}^{2}$ and
$a_{b}=h_{b}^{2}$ and  $\hat{a}=2h_{b}{\hat{h}}$. Inserting the above expansion into (2.1), linearising about
$\hat{a}=2h_{b}{\hat{h}}$. Inserting the above expansion into (2.1), linearising about  $(h_{b},u_{b})$ and replacing
$(h_{b},u_{b})$ and replacing  $h^{2}\rightarrow a$ will lead to a linearised system of equations, which can be formulated as an eigenvalue problem with the eigenmodes represented by
$h^{2}\rightarrow a$ will lead to a linearised system of equations, which can be formulated as an eigenvalue problem with the eigenmodes represented by  $\hat{\boldsymbol{q}}=[\hat{a},\hat{u} ]$.
$\hat{\boldsymbol{q}}=[\hat{a},\hat{u} ]$.
In the absence of gravity,  $\hat{\boldsymbol{q}}$ represents a constant independent of
$\hat{\boldsymbol{q}}$ represents a constant independent of  $z$,
$z$,  $u_{b}=\sqrt{We}$ and
$u_{b}=\sqrt{We}$ and  $h_{b}=1$. Combining both the linearised continuity and momentum equations leads to the dispersion relation
$h_{b}=1$. Combining both the linearised continuity and momentum equations leads to the dispersion relation
 $$\begin{eqnarray}\unicode[STIX]{x1D714}=\sqrt{We}\,k-\frac{3\text{i}Ohk^{2}}{2}\pm \text{i}\sqrt{\frac{(k^{2}-k^{4})}{2}+\frac{9Oh^{2}k^{4}}{4}},\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D714}=\sqrt{We}\,k-\frac{3\text{i}Ohk^{2}}{2}\pm \text{i}\sqrt{\frac{(k^{2}-k^{4})}{2}+\frac{9Oh^{2}k^{4}}{4}},\end{eqnarray}$$ where  $Oh$ is constant throughout the domain. The dispersion relation is used to perform a spatio-temporal stability analysis, which includes the effect of advection speed of the jet on its stability properties. In this framework, we define the impulse response of a system to a localised perturbation that generates a wavepacket growing in space and time. In the laboratory framework, the spatio-temporal behaviour of the wavepacket can be described in terms of the complex absolute wavenumber
$Oh$ is constant throughout the domain. The dispersion relation is used to perform a spatio-temporal stability analysis, which includes the effect of advection speed of the jet on its stability properties. In this framework, we define the impulse response of a system to a localised perturbation that generates a wavepacket growing in space and time. In the laboratory framework, the spatio-temporal behaviour of the wavepacket can be described in terms of the complex absolute wavenumber  $k_{0}$ and the corresponding complex absolute frequency
$k_{0}$ and the corresponding complex absolute frequency  $\unicode[STIX]{x1D714}_{0}=\unicode[STIX]{x1D714}(k_{0})$ whose imaginary part
$\unicode[STIX]{x1D714}_{0}=\unicode[STIX]{x1D714}(k_{0})$ whose imaginary part  $\unicode[STIX]{x1D714}_{0,i}$ will determine the temporal evolution of the wavepacket. For
$\unicode[STIX]{x1D714}_{0,i}$ will determine the temporal evolution of the wavepacket. For  $\unicode[STIX]{x1D714}_{0,i}>0$ the system is absolutely unstable since the disturbance grows fast enough to invade the entire domain in the laboratory frame; and for
$\unicode[STIX]{x1D714}_{0,i}>0$ the system is absolutely unstable since the disturbance grows fast enough to invade the entire domain in the laboratory frame; and for  $\unicode[STIX]{x1D714}_{0,i}<0$ the system is convectively unstable as the localised perturbations are allowed to convect downstream before they grow in the laboratory frame. The complex pair (
$\unicode[STIX]{x1D714}_{0,i}<0$ the system is convectively unstable as the localised perturbations are allowed to convect downstream before they grow in the laboratory frame. The complex pair ( $k_{0},\unicode[STIX]{x1D714}_{0}$) is defined using the saddle point condition or the Briggs–Bers zero-group-velocity criterion, together with the dispersion relation
$k_{0},\unicode[STIX]{x1D714}_{0}$) is defined using the saddle point condition or the Briggs–Bers zero-group-velocity criterion, together with the dispersion relation
 $$\begin{eqnarray}\frac{\text{d}\unicode[STIX]{x1D6E5}(\unicode[STIX]{x1D714}_{0},k_{0})}{\text{d}k}=0,\quad \unicode[STIX]{x1D6E5}(\unicode[STIX]{x1D714}_{0},k_{0})=0,\end{eqnarray}$$
$$\begin{eqnarray}\frac{\text{d}\unicode[STIX]{x1D6E5}(\unicode[STIX]{x1D714}_{0},k_{0})}{\text{d}k}=0,\quad \unicode[STIX]{x1D6E5}(\unicode[STIX]{x1D714}_{0},k_{0})=0,\end{eqnarray}$$ where  $\unicode[STIX]{x1D6E5}$ represents the dispersion relation (4.3) and
$\unicode[STIX]{x1D6E5}$ represents the dispersion relation (4.3) and
 $$\begin{eqnarray}\frac{\unicode[STIX]{x2202}\unicode[STIX]{x1D6E5}}{\unicode[STIX]{x2202}k}=\sqrt{We}-3\text{i}Ohk\pm \text{i}\frac{1-2k^{2}+(3Ohk)^{2}}{\sqrt{2(1-k^{2})+(3Ohk)^{2}}}.\end{eqnarray}$$
$$\begin{eqnarray}\frac{\unicode[STIX]{x2202}\unicode[STIX]{x1D6E5}}{\unicode[STIX]{x2202}k}=\sqrt{We}-3\text{i}Ohk\pm \text{i}\frac{1-2k^{2}+(3Ohk)^{2}}{\sqrt{2(1-k^{2})+(3Ohk)^{2}}}.\end{eqnarray}$$ Equation (4.4) identifies the critical dimensionless speed  $We_{crit}$, for a fixed
$We_{crit}$, for a fixed  $Oh$, which signifies the transition of the jet from an absolutely unstable to a convectively unstable system as shown in figure 4 with the full and dashed lines. The two curves are obtained for a system initialised either using a low or a high
$Oh$, which signifies the transition of the jet from an absolutely unstable to a convectively unstable system as shown in figure 4 with the full and dashed lines. The two curves are obtained for a system initialised either using a low or a high  $Oh$, respectively. For the intermediate values of
$Oh$, respectively. For the intermediate values of  $Oh$, we obtain two saddle points, thus giving two distinct values of the critical curve.
$Oh$, we obtain two saddle points, thus giving two distinct values of the critical curve.

Figure 4. The absolute–convective transition (represented by full and dashed lines) for viscous jets ( $Bo_{in}=0$). The local variation in
$Bo_{in}=0$). The local variation in  $Oh_{z}$ and
$Oh_{z}$ and  $We_{z}$ for three jets with different
$We_{z}$ for three jets with different  $We_{in}$ (constant
$We_{in}$ (constant  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$,
$Bo_{in}=0.1$,  $L=50$) are plotted with different markers, where the red cross for each represents the inlet condition at
$L=50$) are plotted with different markers, where the red cross for each represents the inlet condition at  $z=0$. The distance between consecutive markers for the same jet represents an axial gap of 10 units.
$z=0$. The distance between consecutive markers for the same jet represents an axial gap of 10 units.
4.2 Local stability analysis for jets in the presence of gravity
Extending the formalism for parallel jets to spatially varying jets, we derive the dispersion relation for the coupled equations (2.1), governing the growth of small perturbations about the base state. The linearised system of equations obtained around the spatially varying base flow can be formulated as an eigenvalue problem with the eigenmodes represented by  $\hat{\boldsymbol{q}}(\boldsymbol{z})=[\hat{a}(z),\hat{u} (z)]$ as functions of
$\hat{\boldsymbol{q}}(\boldsymbol{z})=[\hat{a}(z),\hat{u} (z)]$ as functions of  $z$. Next we express the local stability of a gravity jet by introducing the terms
$z$. Next we express the local stability of a gravity jet by introducing the terms  $Oh_{z}$ and
$Oh_{z}$ and  $We_{z}$, which are the local dimensionless numbers at an axial distance of
$We_{z}$, which are the local dimensionless numbers at an axial distance of  $z$ from the nozzle. They are expressed as
$z$ from the nozzle. They are expressed as
 $$\begin{eqnarray}\displaystyle & \displaystyle Oh_{z}=Oh_{in}\sqrt{\frac{h_{b}(0)}{h_{b}(z)}}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle Oh_{z}=Oh_{in}\sqrt{\frac{h_{b}(0)}{h_{b}(z)}}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle We_{z}=h_{b}(z)u_{b}^{2}(z). & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle We_{z}=h_{b}(z)u_{b}^{2}(z). & \displaystyle\end{eqnarray}$$ $Oh_{z}$ and
$Oh_{z}$ and  $We_{z}$ along the entire axial domain
$We_{z}$ along the entire axial domain  $L$ above the absolute–convective transition curve in figure 4. The variation in local
$L$ above the absolute–convective transition curve in figure 4. The variation in local  $Oh_{z}$ and
$Oh_{z}$ and  $We_{z}$ along the jet defined within a domain size
$We_{z}$ along the jet defined within a domain size  $L=50$ for
$L=50$ for  $Oh_{in}=0.3$ and
$Oh_{in}=0.3$ and  $Bo_{in}=0.1$ and for three different inlet Weber numbers
$Bo_{in}=0.1$ and for three different inlet Weber numbers  $We_{in}=[1.75,0.25,0.002]$ are represented by the different markers in figure 4. The gap between consecutive markers is representative of an axial interval of 10 units. In each case, the red cross represents the inlet of the jet whose base state is shown in figure 5. We remind the reader that the case with
$We_{in}=[1.75,0.25,0.002]$ are represented by the different markers in figure 4. The gap between consecutive markers is representative of an axial interval of 10 units. In each case, the red cross represents the inlet of the jet whose base state is shown in figure 5. We remind the reader that the case with  $We_{in}=1.75$ corresponds to the jet whose numerical analysis has been presented in § 3.3.
$We_{in}=1.75$ corresponds to the jet whose numerical analysis has been presented in § 3.3. For  $We_{in}=1.75$ and
$We_{in}=1.75$ and  $0.002$, the entire jet exists in the convective and absolute region, respectively. For intermediate
$0.002$, the entire jet exists in the convective and absolute region, respectively. For intermediate  $We_{in}=0.25$, there exists a small pocket of absolute instability close to the nozzle, after which the local parameters modify along the downstream direction, resulting in the transfer of the jet into a convectively unstable regime.
$We_{in}=0.25$, there exists a small pocket of absolute instability close to the nozzle, after which the local parameters modify along the downstream direction, resulting in the transfer of the jet into a convectively unstable regime.
The parameter  $Bo_{in}$ indirectly affects the instability of the jet through the base-state solution. Since
$Bo_{in}$ indirectly affects the instability of the jet through the base-state solution. Since  $Bo_{in}$ is constant, its relative strength for the stretching of the jet interface depends on the corresponding value of
$Bo_{in}$ is constant, its relative strength for the stretching of the jet interface depends on the corresponding value of  $We_{in}$, with the effect being more pronounced for lower values of
$We_{in}$, with the effect being more pronounced for lower values of  $We_{in}$ as shown in figure 5.
$We_{in}$ as shown in figure 5.

Figure 5. The stretching (or necking) close to the nozzle of the base flow due to the presence of gravity for a jet with  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and three different
$Bo_{in}=0.1$ and three different  $We_{in}$. Clearly, the effect of gravity is prominent for the jet with the smallest
$We_{in}$. Clearly, the effect of gravity is prominent for the jet with the smallest  $We_{in}$.
$We_{in}$.
Next, for the spatially varying base flow, we perform the stability analysis in a local framework wherein the system is considered parallel at each axial location. The local dispersion relation, which now includes the local spatially varying base flow properties, is given by
 $$\begin{eqnarray}\unicode[STIX]{x1D714}^{2}-2u_{b}(z)\unicode[STIX]{x1D714}k+\left(\frac{1}{2\sqrt{a_{b}(z)}}+u_{b}(z)^{2}+3\text{i}Oh_{z}\unicode[STIX]{x1D714}\right)k^{2}-3\text{i}Oh_{z}u_{b}(z)k^{3}-\frac{\sqrt{a_{b}(z)}}{2}k^{4}=0.\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D714}^{2}-2u_{b}(z)\unicode[STIX]{x1D714}k+\left(\frac{1}{2\sqrt{a_{b}(z)}}+u_{b}(z)^{2}+3\text{i}Oh_{z}\unicode[STIX]{x1D714}\right)k^{2}-3\text{i}Oh_{z}u_{b}(z)k^{3}-\frac{\sqrt{a_{b}(z)}}{2}k^{4}=0.\end{eqnarray}$$ For the convectively unstable jet ( $We_{in}=1.75$), the solution of the dispersion relation (4.7) for a given range of complex
$We_{in}=1.75$), the solution of the dispersion relation (4.7) for a given range of complex  $\unicode[STIX]{x1D714}$ (with
$\unicode[STIX]{x1D714}$ (with  $\unicode[STIX]{x1D714}_{i}>0$) results in obtaining four spatial branches, which are expressed as the roots of the fourth-order polynomial (4.7). The solution consists of upstream-propagating (denoted
$\unicode[STIX]{x1D714}_{i}>0$) results in obtaining four spatial branches, which are expressed as the roots of the fourth-order polynomial (4.7). The solution consists of upstream-propagating (denoted  $k^{-}$) and downstream-propagating (denoted
$k^{-}$) and downstream-propagating (denoted  $k^{+}$) branches. To identify these branches, we successively add an artificial
$k^{+}$) branches. To identify these branches, we successively add an artificial  $\unicode[STIX]{x1D714}_{i}$ so as to separate the branches into the upper
$\unicode[STIX]{x1D714}_{i}$ so as to separate the branches into the upper  $k_{i}>0$ and lower
$k_{i}>0$ and lower  $k_{i}<0$ planes (Huerre & Rossi Reference Huerre and Rossi1998; Gallaire & Brun Reference Gallaire and Brun2017). For a downstream-propagating
$k_{i}<0$ planes (Huerre & Rossi Reference Huerre and Rossi1998; Gallaire & Brun Reference Gallaire and Brun2017). For a downstream-propagating  $k^{+}$ branch damped in space, the associated
$k^{+}$ branch damped in space, the associated  $k_{i}>0$. Based on this analysis, we obtain two downstream- and two upstream-propagating waves for the dispersion relation (4.7). The
$k_{i}>0$. Based on this analysis, we obtain two downstream- and two upstream-propagating waves for the dispersion relation (4.7). The  $k$ branches for the localised dimensionless numbers at the nozzle inlet (
$k$ branches for the localised dimensionless numbers at the nozzle inlet ( $z=0$) and domain end (
$z=0$) and domain end ( $z=50$) are shown in figure 6(a) and 6(b), respectively, with the two
$z=50$) are shown in figure 6(a) and 6(b), respectively, with the two  $k^{+}$ branches denoted by the black and green colours and the two
$k^{+}$ branches denoted by the black and green colours and the two  $k^{-}$ waves by the red and blue colours. The presence of two
$k^{-}$ waves by the red and blue colours. The presence of two  $k^{+}$ and
$k^{+}$ and  $k^{-}$ waves is not specific to the present jet characteristics but rather exists for all the tested cases in the range of
$k^{-}$ waves is not specific to the present jet characteristics but rather exists for all the tested cases in the range of  $Oh_{in}=[0.1,~10]$,
$Oh_{in}=[0.1,~10]$,  $We_{in}=[0.8,~10]$ and
$We_{in}=[0.8,~10]$ and  $Bo_{in}=[0,~1]$ for
$Bo_{in}=[0,~1]$ for  $L=50$.
$L=50$.

Figure 6. The four  $k$ branches shown in four different colours, obtained as a solution of the dispersion relation for complex
$k$ branches shown in four different colours, obtained as a solution of the dispersion relation for complex  $\unicode[STIX]{x1D714}$ and for increasing values of
$\unicode[STIX]{x1D714}$ and for increasing values of  $\unicode[STIX]{x1D714}_{i}$ for a jet defined by
$\unicode[STIX]{x1D714}_{i}$ for a jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$ at (a) the nozzle outlet
$We_{in}=1.75$ at (a) the nozzle outlet  $z=0$ and (b) the jet exit
$z=0$ and (b) the jet exit  $z=L=50$. The arrows represent the direction of movement of the waves for increasing values of
$z=L=50$. The arrows represent the direction of movement of the waves for increasing values of  $\unicode[STIX]{x1D714}_{i}$.
$\unicode[STIX]{x1D714}_{i}$.
4.3 Spatial stability analysis
Since the base flow with  $We_{in}=1.75$ exists in the convectively unstable regime (see figure 4), we then proceed to analyse the base flow using the spatial stability framework, wherein the spatial growth rate for the imposed real frequency determines the flow stability.
$We_{in}=1.75$ exists in the convectively unstable regime (see figure 4), we then proceed to analyse the base flow using the spatial stability framework, wherein the spatial growth rate for the imposed real frequency determines the flow stability.

Figure 7. (a) Growth rate  $-k_{i}$ for a jet defined by
$-k_{i}$ for a jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$, plotted as a function of the frequency for the four
$We_{in}=1.75$, plotted as a function of the frequency for the four  $k$ branches at the nozzle exit with the dominant
$k$ branches at the nozzle exit with the dominant  $k$ branch represented in black. (b) The growth rate corresponding to the dominant
$k$ branch represented in black. (b) The growth rate corresponding to the dominant  $k$ branch at different axial locations. The inset shows the evolution of the locus of the real and imaginary parts of
$k$ branch at different axial locations. The inset shows the evolution of the locus of the real and imaginary parts of  $\hat{u} _{r}$ and
$\hat{u} _{r}$ and  $\hat{u} _{i}$ at the optimal frequency as
$\hat{u} _{i}$ at the optimal frequency as  $z$ increases. (c) The growth rate
$z$ increases. (c) The growth rate  $-k_{i}$ of the dominant
$-k_{i}$ of the dominant  $k$ branch as a function of
$k$ branch as a function of  $z$ for various
$z$ for various  $\unicode[STIX]{x1D714}$. (d) The
$\unicode[STIX]{x1D714}$. (d) The  $k_{r}$ related to the optimal growth rate in (b) as a function of real frequency. The coloured markers (●) in (b) and (d) correspond to the same forcing frequency and the axial location.
$k_{r}$ related to the optimal growth rate in (b) as a function of real frequency. The coloured markers (●) in (b) and (d) correspond to the same forcing frequency and the axial location.
Given the polynomial nature of the dispersion relation, there are four spatial waves. We have verified that two of them are  $k^{+}$, downstream-propagating, waves while the remaining two are
$k^{+}$, downstream-propagating, waves while the remaining two are  $k^{-}$, upstream-propagating, waves (see figure 6). For a more detailed account on the nature of spatial waves in capillary jets, depending on the flow model, the reader is referred to Guerrero, González & García (Reference Guerrero, González and García2016).
$k^{-}$, upstream-propagating, waves (see figure 6). For a more detailed account on the nature of spatial waves in capillary jets, depending on the flow model, the reader is referred to Guerrero, González & García (Reference Guerrero, González and García2016).
Among the four  $k$ waves, only one of the
$k$ waves, only one of the  $k^{+}$ waves is seen to be amplified. To obtain this dominant
$k^{+}$ waves is seen to be amplified. To obtain this dominant  $k$ wave, we plot the spatial growth rate
$k$ wave, we plot the spatial growth rate  $-k_{i}$ as a function of the real forcing frequency
$-k_{i}$ as a function of the real forcing frequency  $\unicode[STIX]{x1D714}$ at the nozzle inlet. As shown in figure 7(a), among the four
$\unicode[STIX]{x1D714}$ at the nozzle inlet. As shown in figure 7(a), among the four  $k$ branches, only the branch denoted in black has a growth rate that is positive in its propagation direction. We chose the
$k$ branches, only the branch denoted in black has a growth rate that is positive in its propagation direction. We chose the  $k$ wave corresponding to this amplified
$k$ wave corresponding to this amplified  $k^{+}$ branch as the dominant wavenumber for all frequencies. The relevant
$k^{+}$ branch as the dominant wavenumber for all frequencies. The relevant  $k(z)$ branches are then obtained for different
$k(z)$ branches are then obtained for different  $z$ along the jet as shown in figure 7(b,d) by imposing the spatially dependent base flow and
$z$ along the jet as shown in figure 7(b,d) by imposing the spatially dependent base flow and  $Oh_{z}$ in (4.7). Figure 7(b) shows that the most amplified frequency shifts to higher values as one travels away from the nozzle. The associated eigenmode
$Oh_{z}$ in (4.7). Figure 7(b) shows that the most amplified frequency shifts to higher values as one travels away from the nozzle. The associated eigenmode  $\hat{\boldsymbol{q}}(z)$ also changes as one progresses downstream. Imposing
$\hat{\boldsymbol{q}}(z)$ also changes as one progresses downstream. Imposing  $\Vert \hat{\boldsymbol{q}}\Vert =1$ at every axial location as the normalisation condition, together with
$\Vert \hat{\boldsymbol{q}}\Vert =1$ at every axial location as the normalisation condition, together with  $\hat{a}_{i}=0$ to set the phase, we see in figure 7(c) the evolution of the locus of the real and imaginary parts of the remaining degrees of freedom
$\hat{a}_{i}=0$ to set the phase, we see in figure 7(c) the evolution of the locus of the real and imaginary parts of the remaining degrees of freedom  $\hat{u} _{r}$ and
$\hat{u} _{r}$ and  $\hat{u} _{i}$ as
$\hat{u} _{i}$ as  $z$ increases (remember that
$z$ increases (remember that  $\hat{u} _{r}^{2}+\hat{u} _{i}^{2}+\hat{a}_{r}^{2}=1$). While this locus is difficult to interpret from a physical point of view, it highlights the change of the eigenmode along the jet axis in such non-parallel gravity-driven jets.
$\hat{u} _{r}^{2}+\hat{u} _{i}^{2}+\hat{a}_{r}^{2}=1$). While this locus is difficult to interpret from a physical point of view, it highlights the change of the eigenmode along the jet axis in such non-parallel gravity-driven jets.
The knowledge of the relevant  $k^{+}$ wave obtained for a given
$k^{+}$ wave obtained for a given  $\unicode[STIX]{x1D714}$ allows us to evaluate the leading-order response due to different forcing frequencies imposed on the base flow, conveniently expressed as
$\unicode[STIX]{x1D714}$ allows us to evaluate the leading-order response due to different forcing frequencies imposed on the base flow, conveniently expressed as
 $$\begin{eqnarray}\boldsymbol{q}^{\prime }(z,t)=\hat{\boldsymbol{q}}(\unicode[STIX]{x1D714},z)\exp \!\left[\text{i}\left(\int _{0}^{z}k(\unicode[STIX]{x1D714},z^{\prime })\,\text{d}z^{\prime }-\unicode[STIX]{x1D714}t\right)\right].\end{eqnarray}$$
$$\begin{eqnarray}\boldsymbol{q}^{\prime }(z,t)=\hat{\boldsymbol{q}}(\unicode[STIX]{x1D714},z)\exp \!\left[\text{i}\left(\int _{0}^{z}k(\unicode[STIX]{x1D714},z^{\prime })\,\text{d}z^{\prime }-\unicode[STIX]{x1D714}t\right)\right].\end{eqnarray}$$ The overall response norm defined in a domain size  $L$ is then given as
$L$ is then given as
 $$\begin{eqnarray}G_{s}(\unicode[STIX]{x1D714},L)=\left\Vert \int _{0}^{L}\hat{\boldsymbol{q}}(\unicode[STIX]{x1D714},z)\exp \!\left[\text{i}\left(\int _{0}^{z}k(\unicode[STIX]{x1D714},z^{\prime })\,\text{d}z^{\prime }-\unicode[STIX]{x1D714}t\right)\right]\right\Vert .\end{eqnarray}$$
$$\begin{eqnarray}G_{s}(\unicode[STIX]{x1D714},L)=\left\Vert \int _{0}^{L}\hat{\boldsymbol{q}}(\unicode[STIX]{x1D714},z)\exp \!\left[\text{i}\left(\int _{0}^{z}k(\unicode[STIX]{x1D714},z^{\prime })\,\text{d}z^{\prime }-\unicode[STIX]{x1D714}t\right)\right]\right\Vert .\end{eqnarray}$$ This allows us to determine the optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}$ that results in the maximal gain
$\unicode[STIX]{x1D714}_{opt}$ that results in the maximal gain
 $$\begin{eqnarray}G_{s,max}(L)=\underset{\unicode[STIX]{x1D714}}{\max }\;[G_{s}(\unicode[STIX]{x1D714},L)],\end{eqnarray}$$
$$\begin{eqnarray}G_{s,max}(L)=\underset{\unicode[STIX]{x1D714}}{\max }\;[G_{s}(\unicode[STIX]{x1D714},L)],\end{eqnarray}$$ attained at a frequency  $\unicode[STIX]{x1D714}_{opt}$. Figure 8 (in dotted lines) shows the spatial gain as a function of forcing frequency for two arbitrary domain sizes
$\unicode[STIX]{x1D714}_{opt}$. Figure 8 (in dotted lines) shows the spatial gain as a function of forcing frequency for two arbitrary domain sizes  $L=50$ and
$L=50$ and  $60$. We notice that
$60$. We notice that  $\unicode[STIX]{x1D714}_{opt}$ shifts from 1.16 to 1.21 as we increase the domain size.
$\unicode[STIX]{x1D714}_{opt}$ shifts from 1.16 to 1.21 as we increase the domain size.

Figure 8. Comparison of the total gain  $G$ at different frequencies
$G$ at different frequencies  $\unicode[STIX]{x1D714}$ from the resolvent analysis and the spatial analysis for domain sizes (a)
$\unicode[STIX]{x1D714}$ from the resolvent analysis and the spatial analysis for domain sizes (a)  $L=50$ and (b)
$L=50$ and (b)  $L=60$ and for the jet defined by
$L=60$ and for the jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$. The resolvent gain is computed by using the transfer function and the direct mode obtained from the spatial analysis. All the theories predict a shift in
$We_{in}=1.75$. The resolvent gain is computed by using the transfer function and the direct mode obtained from the spatial analysis. All the theories predict a shift in  $\unicode[STIX]{x1D714}_{opt}$ as
$\unicode[STIX]{x1D714}_{opt}$ as  $L$ is increased.
$L$ is increased.
4.4 Weakly non-parallel stability analysis (WKBJ)
In order to further incorporate the non-parallelism of the base flow, we extend our spatial analysis by including the WKBJ formalism introduced by Gaster et al. (Reference Gaster, Kit and Wygnanski1985) and Huerre & Rossi (Reference Huerre and Rossi1998) for a spatial mixing layer and applied by Viola et al. (Reference Viola, Arratia and Gallaire2016) for swirling flows.
In this framework, we introduce a slow streamwise scale  $Z$, which relates to the fast scale
$Z$, which relates to the fast scale  $z$ as
$z$ as  $Z=\unicode[STIX]{x1D702}z$, where
$Z=\unicode[STIX]{x1D702}z$, where  $\unicode[STIX]{x1D702}\ll 1$ is a measure of the weak non-parallelism. The new base flow depends only on
$\unicode[STIX]{x1D702}\ll 1$ is a measure of the weak non-parallelism. The new base flow depends only on  $Z$ and the global response to inlet forcing takes the modulated wave form
$Z$ and the global response to inlet forcing takes the modulated wave form
 $$\begin{eqnarray}\boldsymbol{q}^{\prime }(Z,t)\sim A(Z)\hat{\boldsymbol{q}}(Z,0)\exp \!\left[\text{i}\left(\frac{1}{\unicode[STIX]{x1D702}}\int _{0}^{Z}k(\unicode[STIX]{x1D714},Z^{\prime })\,\text{d}Z^{\prime }-\unicode[STIX]{x1D714}t\right)\right],\end{eqnarray}$$
$$\begin{eqnarray}\boldsymbol{q}^{\prime }(Z,t)\sim A(Z)\hat{\boldsymbol{q}}(Z,0)\exp \!\left[\text{i}\left(\frac{1}{\unicode[STIX]{x1D702}}\int _{0}^{Z}k(\unicode[STIX]{x1D714},Z^{\prime })\,\text{d}Z^{\prime }-\unicode[STIX]{x1D714}t\right)\right],\end{eqnarray}$$ where  $\hat{\boldsymbol{q}}(\unicode[STIX]{x1D714},Z)$ is the local eigenmode and
$\hat{\boldsymbol{q}}(\unicode[STIX]{x1D714},Z)$ is the local eigenmode and  $k(\unicode[STIX]{x1D714},Z)$ the local wavenumber at section
$k(\unicode[STIX]{x1D714},Z)$ the local wavenumber at section  $Z$ and a fixed forcing frequency
$Z$ and a fixed forcing frequency  $\unicode[STIX]{x1D714}$. The amplitude function
$\unicode[STIX]{x1D714}$. The amplitude function  $A(Z)$ acts as an envelope, smoothly connecting the progressive slices of the parallel spatial analysis. At each axial location, we impose
$A(Z)$ acts as an envelope, smoothly connecting the progressive slices of the parallel spatial analysis. At each axial location, we impose  $\hat{\boldsymbol{q}}^{\text{H}}\boldsymbol{\cdot }\hat{\boldsymbol{q}}=1$, where
$\hat{\boldsymbol{q}}^{\text{H}}\boldsymbol{\cdot }\hat{\boldsymbol{q}}=1$, where  $(\cdot )^{\text{H}}$ is the transconjugate. As described in § A.6, imposing an asymptotic expansion and a compatibility condition, the local stability analysis is retrieved at zeroth order in
$(\cdot )^{\text{H}}$ is the transconjugate. As described in § A.6, imposing an asymptotic expansion and a compatibility condition, the local stability analysis is retrieved at zeroth order in  $\unicode[STIX]{x1D702}$, while at first order in
$\unicode[STIX]{x1D702}$, while at first order in  $\unicode[STIX]{x1D702}$ the following amplitude equation is obtained:
$\unicode[STIX]{x1D702}$ the following amplitude equation is obtained:
 $$\begin{eqnarray}M(Z)\frac{\text{d}A(Z)}{\text{d}Z}+N(Z)A(Z)=0,\end{eqnarray}$$
$$\begin{eqnarray}M(Z)\frac{\text{d}A(Z)}{\text{d}Z}+N(Z)A(Z)=0,\end{eqnarray}$$whose solution is given as
 $$\begin{eqnarray}A(Z)=A_{0}\exp \!\left(-\int _{0}^{Z}\frac{N(Z^{\prime })}{M(Z^{\prime })}\,\text{d}Z^{\prime }\right).\end{eqnarray}$$
$$\begin{eqnarray}A(Z)=A_{0}\exp \!\left(-\int _{0}^{Z}\frac{N(Z^{\prime })}{M(Z^{\prime })}\,\text{d}Z^{\prime }\right).\end{eqnarray}$$ The functions  $M(Z)$ and
$M(Z)$ and  $N(Z)$ are defined in § A.6. The amplitude at the inlet is set as
$N(Z)$ are defined in § A.6. The amplitude at the inlet is set as  $A(0)=1$, which simplifies the forcing expression at the inlet to
$A(0)=1$, which simplifies the forcing expression at the inlet to  $\boldsymbol{q}^{\prime }(0,t)=\hat{\boldsymbol{q}}(0)\exp (\text{i}\unicode[STIX]{x1D714}t)$. Finally, we express the total spatial gain at first order as
$\boldsymbol{q}^{\prime }(0,t)=\hat{\boldsymbol{q}}(0)\exp (\text{i}\unicode[STIX]{x1D714}t)$. Finally, we express the total spatial gain at first order as
 $$\begin{eqnarray}G_{Amp}^{2}(\unicode[STIX]{x1D714},L)=\frac{\displaystyle \int _{0}^{z}A^{\text{H}}(z^{\prime })A(z^{\prime })(\hat{\boldsymbol{q}}^{\text{H}}(z^{\prime })\boldsymbol{\cdot }\hat{\boldsymbol{q}}(z^{\prime }))\left[\exp \left(\int _{0}^{z^{\prime }}-2k_{i}(z^{\prime \prime })\,\text{d}z^{\prime \prime }\right)\right]\,\text{d}z^{\prime }}{\hat{\boldsymbol{q}}^{\text{H}}(0)\boldsymbol{\cdot }\hat{\boldsymbol{q}}(0)}.\end{eqnarray}$$
$$\begin{eqnarray}G_{Amp}^{2}(\unicode[STIX]{x1D714},L)=\frac{\displaystyle \int _{0}^{z}A^{\text{H}}(z^{\prime })A(z^{\prime })(\hat{\boldsymbol{q}}^{\text{H}}(z^{\prime })\boldsymbol{\cdot }\hat{\boldsymbol{q}}(z^{\prime }))\left[\exp \left(\int _{0}^{z^{\prime }}-2k_{i}(z^{\prime \prime })\,\text{d}z^{\prime \prime }\right)\right]\,\text{d}z^{\prime }}{\hat{\boldsymbol{q}}^{\text{H}}(0)\boldsymbol{\cdot }\hat{\boldsymbol{q}}(0)}.\end{eqnarray}$$ The global gain of the response due to the forcing frequency, for fixed domain sizes, is reported in figure 8, where  $\unicode[STIX]{x1D714}_{opt}=1.24$ and
$\unicode[STIX]{x1D714}_{opt}=1.24$ and  $1.30$ for
$1.30$ for  $L=50$ and
$L=50$ and  $60$, respectively. The WKBJ approximation greatly modifies the gain when compared to the zeroth-order analysis and shifts the optimal forcing frequency predicted from the spatial analysis, which excludes the amplitude equation. However, to truly assess the validity of the amplitude equation, one needs to analyse the base flow in the global framework using the resolvent analysis, which will be the focus of our discussion in the next section.
$60$, respectively. The WKBJ approximation greatly modifies the gain when compared to the zeroth-order analysis and shifts the optimal forcing frequency predicted from the spatial analysis, which excludes the amplitude equation. However, to truly assess the validity of the amplitude equation, one needs to analyse the base flow in the global framework using the resolvent analysis, which will be the focus of our discussion in the next section.
5 Global stability analysis
Unlike the local stability analysis, the global stability framework allows taking into consideration the axially varying base state due to the stretching effect of gravity. The global stability analysis of the leading-order 1-D model was performed by Sauter & Buggisch (Reference Sauter and Buggisch2005), and refined later on by Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013). Following the work of the previous authors, we first evaluate the inherent global stability of the base flow in § 5.1. We next perform a resolvent analysis in § 5.2 on the globally stable base flow to evaluate its response in the presence of a given perturbation.
5.1 Global stability
Since the base flow is spatially varying, the perturbations imposed on it are no longer sought in the form of Fourier modes but are expanded in the form
 $$\begin{eqnarray}\displaystyle & \displaystyle h(z,t)=h_{b}(z)+\unicode[STIX]{x1D716}\tilde{h}(z)\text{e}^{\unicode[STIX]{x1D706}t}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle h(z,t)=h_{b}(z)+\unicode[STIX]{x1D716}\tilde{h}(z)\text{e}^{\unicode[STIX]{x1D706}t}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle u(z,t)=u_{b}(z)+\unicode[STIX]{x1D716}\tilde{u} (z)\text{e}^{\unicode[STIX]{x1D706}t}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle u(z,t)=u_{b}(z)+\unicode[STIX]{x1D716}\tilde{u} (z)\text{e}^{\unicode[STIX]{x1D706}t}, & \displaystyle\end{eqnarray}$$ $\unicode[STIX]{x1D716}\ll 1$, and
$\unicode[STIX]{x1D716}\ll 1$, and  $\tilde{h}(z)$ and
$\tilde{h}(z)$ and  $\tilde{u} (z)$ are the global stability modes related to the complex growth rate
$\tilde{u} (z)$ are the global stability modes related to the complex growth rate  $\unicode[STIX]{x1D706}$. Substituting expressions (5.1) in (2.1) and linearising around the base state
$\unicode[STIX]{x1D706}$. Substituting expressions (5.1) in (2.1) and linearising around the base state  $(h_{b},u_{b})$ results in the general eigenvalue problem of the form
$(h_{b},u_{b})$ results in the general eigenvalue problem of the form  $$\begin{eqnarray}\unicode[STIX]{x1D706}\unicode[STIX]{x1D644}\left[\begin{array}{@{}c@{}}\tilde{h}\\ \tilde{u} \end{array}\right]=\unicode[STIX]{x1D648}\left[\begin{array}{@{}c@{}}\tilde{h}\\ \tilde{u} \end{array}\right],\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D706}\unicode[STIX]{x1D644}\left[\begin{array}{@{}c@{}}\tilde{h}\\ \tilde{u} \end{array}\right]=\unicode[STIX]{x1D648}\left[\begin{array}{@{}c@{}}\tilde{h}\\ \tilde{u} \end{array}\right],\end{eqnarray}$$ with boundary conditions  $\tilde{h}(0,t)=0$ and
$\tilde{h}(0,t)=0$ and  $\tilde{u} (0,t)=0$. We do not impose any boundary conditions at the end of the domain,
$\tilde{u} (0,t)=0$. We do not impose any boundary conditions at the end of the domain,  $z=L$, since it is not possible a priori to distinguish between amplifying perturbations and transient disturbances. This will occur in any problem that involves an ‘active system’ and can support amplifying waves (Briggs Reference Briggs1964; Leib & Goldstein Reference Leib and Goldstein1986). The global stability analysis presented in Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013) does not impose any boundary conditions for
$z=L$, since it is not possible a priori to distinguish between amplifying perturbations and transient disturbances. This will occur in any problem that involves an ‘active system’ and can support amplifying waves (Briggs Reference Briggs1964; Leib & Goldstein Reference Leib and Goldstein1986). The global stability analysis presented in Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013) does not impose any boundary conditions for  $z=L$ since the numerical method naturally converges to the most regular asymptotic solution of the base flow equation (2.5) and eigenvalue problem (5.2), as
$z=L$ since the numerical method naturally converges to the most regular asymptotic solution of the base flow equation (2.5) and eigenvalue problem (5.2), as  $z\rightarrow \infty$. Nonetheless, we checked that the dominant eigenvalue and eigenmode were unaffected by the presence of a Neumann boundary condition at
$z\rightarrow \infty$. Nonetheless, we checked that the dominant eigenvalue and eigenmode were unaffected by the presence of a Neumann boundary condition at  $z=L$, namely
$z=L$, namely  $\text{d}\tilde{u} (L)/\text{d}z=0$.
$\text{d}\tilde{u} (L)/\text{d}z=0$.
The complete expressions for the linear operator  $\unicode[STIX]{x1D648}$ can be found in § A.5. The solution of (5.2) results in a set of eigenmodes (
$\unicode[STIX]{x1D648}$ can be found in § A.5. The solution of (5.2) results in a set of eigenmodes ( $\tilde{h},\tilde{u}$), whose growth rate and frequency are given by the real (
$\tilde{h},\tilde{u}$), whose growth rate and frequency are given by the real ( $\unicode[STIX]{x1D706}_{r}$) and imaginary (
$\unicode[STIX]{x1D706}_{r}$) and imaginary ( $\unicode[STIX]{x1D706}_{i}$) parts of the related eigenvalue. A base state is stable to self-induced oscillations provided
$\unicode[STIX]{x1D706}_{i}$) parts of the related eigenvalue. A base state is stable to self-induced oscillations provided  $\unicode[STIX]{x1D706}_{r}<0$.
$\unicode[STIX]{x1D706}_{r}<0$.
To solve the eigenvalue problem, the Chebyshev collocation method is used to obtain the differential operators. Derivatives with respect to  $z$ are calculated using the standard Chebyshev differentiation matrices. Denoting the non-dimensional physical domain as
$z$ are calculated using the standard Chebyshev differentiation matrices. Denoting the non-dimensional physical domain as  $L$, the domain is mapped into the interval
$L$, the domain is mapped into the interval  $-1\leqslant y\leqslant 1$ by using the transformation
$-1\leqslant y\leqslant 1$ by using the transformation  $z=[(L/2)\times (y+1)]$. The global stability scheme is validated against the results of Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013).
$z=[(L/2)\times (y+1)]$. The global stability scheme is validated against the results of Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013).

Figure 9. (a,c) Eigenvalue spectrum  $\unicode[STIX]{x1D706}$ obtained for three different resolutions
$\unicode[STIX]{x1D706}$ obtained for three different resolutions  $N_{1}=100$,
$N_{1}=100$,  $N_{2}=125$ and
$N_{2}=125$ and  $N_{3}=150$ and (b,d) the real and imaginary parts of the leading eigenfunction
$N_{3}=150$ and (b,d) the real and imaginary parts of the leading eigenfunction  $\tilde{h}$, for
$\tilde{h}$, for  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$,
$Bo_{in}=0.1$,  $L=50$ and evaluated for two different values of inlet Weber number. Panels (a,b) correspond to
$L=50$ and evaluated for two different values of inlet Weber number. Panels (a,b) correspond to  $We_{in}=0.25$ where the leading eigenvalue has an eigenfrequency
$We_{in}=0.25$ where the leading eigenvalue has an eigenfrequency  $\unicode[STIX]{x1D706}_{i}=0.55$. Panels (c,d) correspond to
$\unicode[STIX]{x1D706}_{i}=0.55$. Panels (c,d) correspond to  $We_{in}=1.75$ with
$We_{in}=1.75$ with  $\unicode[STIX]{x1D706}_{i}=1.97$. For both Weber numbers, the entire spectrum has
$\unicode[STIX]{x1D706}_{i}=1.97$. For both Weber numbers, the entire spectrum has  $\unicode[STIX]{x1D706}_{r}<0$, rendering the system globally stable.
$\unicode[STIX]{x1D706}_{r}<0$, rendering the system globally stable.
For the three cases of jets described in figure 5, with  $L=50$,
$L=50$,  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and three different values of
$Bo_{in}=0.1$ and three different values of  $We_{in}$, a global stability analysis is carried out using different resolutions (
$We_{in}$, a global stability analysis is carried out using different resolutions ( $N_{1}=100,N_{2}=125,N_{3}=150$) to exclude spurious eigenvalues. The eigenvalue spectra for
$N_{1}=100,N_{2}=125,N_{3}=150$) to exclude spurious eigenvalues. The eigenvalue spectra for  $We_{in}=0.25$,
$We_{in}=0.25$,  $1.75$ and
$1.75$ and  $0.002$ are represented in figures 9(a), 9(c) and 10(a), respectively. The dominant eigenvalues have
$0.002$ are represented in figures 9(a), 9(c) and 10(a), respectively. The dominant eigenvalues have  $\unicode[STIX]{x1D706}_{r}<0$ (for
$\unicode[STIX]{x1D706}_{r}<0$ (for  $We_{in}=0.25$ and
$We_{in}=0.25$ and  $1.75$) and
$1.75$) and  $\unicode[STIX]{x1D706}_{r}>0$ (for
$\unicode[STIX]{x1D706}_{r}>0$ (for  $We_{in}=0.0025$), thus representing globally stable and unstable jets, respectively. Note, however, that the local stability analysis of the globally stable flow with
$We_{in}=0.0025$), thus representing globally stable and unstable jets, respectively. Note, however, that the local stability analysis of the globally stable flow with  $We_{in}=0.25$ predicts the jet to have a small ‘pocket’ of absolute instability close to the nozzle.
$We_{in}=0.25$ predicts the jet to have a small ‘pocket’ of absolute instability close to the nozzle.
Eigenmodes corresponding to the dominant eigenvalues are presented in the accompanying figures. We note that the dominant eigenmode, as represented in figures 9(b), 9(d) and 10(b), has an amplitude that grows downstream. Figure 10(b) also shows that the wavelength grows downstream. This is a consequence of the fluid acceleration caused by gravity (Tomotika Reference Tomotika1936; Rubio-Rubio et al. Reference Rubio-Rubio, Sevilla and Gordillo2013) and can be interpreted from figure 7(d), where  $k_{r}$ is seen to decrease with increasing
$k_{r}$ is seen to decrease with increasing  $z$ for a fixed forcing frequency
$z$ for a fixed forcing frequency  $\unicode[STIX]{x1D714}$. Further we see that, close to the outlet, the eigenmodes evolve at a much larger length scale compared to that related to the variations in a steady-state jet, thus strengthening the argument that weakly non-parallel stability analysis should be used with care for predicting the global stability of the gravity jet. A similar warning for the use of local analysis under strong stretching is one of the main conclusions of the work presented in Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013).
$\unicode[STIX]{x1D714}$. Further we see that, close to the outlet, the eigenmodes evolve at a much larger length scale compared to that related to the variations in a steady-state jet, thus strengthening the argument that weakly non-parallel stability analysis should be used with care for predicting the global stability of the gravity jet. A similar warning for the use of local analysis under strong stretching is one of the main conclusions of the work presented in Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013).

Figure 10. (a) Eigenvalue spectrum  $\unicode[STIX]{x1D706}$ obtained for three different resolutions
$\unicode[STIX]{x1D706}$ obtained for three different resolutions  $N_{1}=100$,
$N_{1}=100$,  $N_{2}=125$ and
$N_{2}=125$ and  $N_{3}=150$ and (b) the real and imaginary parts of the leading eigenfunction
$N_{3}=150$ and (b) the real and imaginary parts of the leading eigenfunction  $\bar{h}$, for
$\bar{h}$, for  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$,
$Bo_{in}=0.1$,  $We_{in}=0.002$ and
$We_{in}=0.002$ and  $L=50$. We note that the leading eigenvalue has a positive growth rate
$L=50$. We note that the leading eigenvalue has a positive growth rate  $\unicode[STIX]{x1D706}_{r}>0$, thus rendering the system globally unstable.
$\unicode[STIX]{x1D706}_{r}>0$, thus rendering the system globally unstable.
5.2 Global resolvent
Analysing the linear response of the base state for an external harmonic forcing at frequency  $\unicode[STIX]{x1D714}$ is only well defined if the linear operator is stable, or, in other words, the base state is stable, where the imposed perturbations are allowed to travel downstream before spreading in the entire domain under consideration. Otherwise the algebraically amplified solution is superimposed by the unforced naturally growing exponential mode. Keeping this in mind, in this section we present the resolvent analysis for the stable gravity jet (
$\unicode[STIX]{x1D714}$ is only well defined if the linear operator is stable, or, in other words, the base state is stable, where the imposed perturbations are allowed to travel downstream before spreading in the entire domain under consideration. Otherwise the algebraically amplified solution is superimposed by the unforced naturally growing exponential mode. Keeping this in mind, in this section we present the resolvent analysis for the stable gravity jet ( $We_{in}=1.75$). We would like to remind the reader that a similar response analysis along the lines of the present work was presented in Consoli-Lizzi et al. (Reference Consoli-Lizzi, Coenen and Sevilla2014), and can also be found in Consoli-Lizzi (Reference Consoli-Lizzi2016). To compare our linear resolvent results with the nonlinear simulations of § 3, we impose similar inlet forcing conditions and approximate the gain predicted by the resolvent analysis in terms of the forcing amplitude.
$We_{in}=1.75$). We would like to remind the reader that a similar response analysis along the lines of the present work was presented in Consoli-Lizzi et al. (Reference Consoli-Lizzi, Coenen and Sevilla2014), and can also be found in Consoli-Lizzi (Reference Consoli-Lizzi2016). To compare our linear resolvent results with the nonlinear simulations of § 3, we impose similar inlet forcing conditions and approximate the gain predicted by the resolvent analysis in terms of the forcing amplitude.
5.2.1 Problem formulation
The external force  $f$ is modelled as an incoming perturbation in the form of an unsteady upstream boundary condition of the 1-D Eggers and Dupont equations (2.1). The resulting linearised equation is represented as
$f$ is modelled as an incoming perturbation in the form of an unsteady upstream boundary condition of the 1-D Eggers and Dupont equations (2.1). The resulting linearised equation is represented as
 $$\begin{eqnarray}\unicode[STIX]{x1D644}\unicode[STIX]{x2202}_{t}[\boldsymbol{s}]=\unicode[STIX]{x1D648}[\boldsymbol{s}]+\unicode[STIX]{x1D63D}_{f}f,\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D644}\unicode[STIX]{x2202}_{t}[\boldsymbol{s}]=\unicode[STIX]{x1D648}[\boldsymbol{s}]+\unicode[STIX]{x1D63D}_{f}f,\end{eqnarray}$$ where, as in the eigenvalue problem (5.2) with  $N$ as the resolution number,
$N$ as the resolution number,  $\boldsymbol{s}=[h,u]$,
$\boldsymbol{s}=[h,u]$,  $\unicode[STIX]{x1D644}$ represents the identity matrix of rank
$\unicode[STIX]{x1D644}$ represents the identity matrix of rank  $2N\times 2N$,
$2N\times 2N$,  $\unicode[STIX]{x1D648}$ is the linear operator of rank
$\unicode[STIX]{x1D648}$ is the linear operator of rank  $2N\times 2N$ (detailed in § A.5) and
$2N\times 2N$ (detailed in § A.5) and  $\unicode[STIX]{x1D63D}_{f}$ is a
$\unicode[STIX]{x1D63D}_{f}$ is a  $2N\times 2N$ prolongation operator that maps the inlet forcing
$2N\times 2N$ prolongation operator that maps the inlet forcing  $f$ (
$f$ ( $2N\times 1$) onto the bulk equation (Garnaud et al. Reference Garnaud, Lesshafft, Schmid and Huerre2013; Viola et al. Reference Viola, Arratia and Gallaire2016). Considering a time-harmonic forcing,
$2N\times 1$) onto the bulk equation (Garnaud et al. Reference Garnaud, Lesshafft, Schmid and Huerre2013; Viola et al. Reference Viola, Arratia and Gallaire2016). Considering a time-harmonic forcing,  $f=\tilde{f}\exp (-\text{i}\unicode[STIX]{x1D714}t)$, results in an asymptotic flow response
$f=\tilde{f}\exp (-\text{i}\unicode[STIX]{x1D714}t)$, results in an asymptotic flow response  $\boldsymbol{s}=\tilde{\boldsymbol{s}}\exp (-\text{i}\unicode[STIX]{x1D714}t)$ at the same frequency. Here
$\boldsymbol{s}=\tilde{\boldsymbol{s}}\exp (-\text{i}\unicode[STIX]{x1D714}t)$ at the same frequency. Here  $\tilde{\boldsymbol{s}}=[\tilde{h},\tilde{u} ]$. Imposing these transformations in (5.3) we obtain
$\tilde{\boldsymbol{s}}=[\tilde{h},\tilde{u} ]$. Imposing these transformations in (5.3) we obtain
 $$\begin{eqnarray}-\!(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})\tilde{\boldsymbol{s}}=\unicode[STIX]{x1D63D}_{f}\tilde{f}.\end{eqnarray}$$
$$\begin{eqnarray}-\!(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})\tilde{\boldsymbol{s}}=\unicode[STIX]{x1D63D}_{f}\tilde{f}.\end{eqnarray}$$ Equation (5.4) is subjected to two inlet and two outlet boundary conditions. The solution forced only in  $u$ at the nozzle satisfies
$u$ at the nozzle satisfies  $\tilde{h}=0$ and
$\tilde{h}=0$ and  $\tilde{u} =1$, while for the one that is forced in both
$\tilde{u} =1$, while for the one that is forced in both  $h$ and
$h$ and  $u$,
$u$,  $\tilde{h}$ and
$\tilde{h}$ and  $\tilde{u}$ can be chosen arbitrarily. We use the former when comparing the results with the nonlinear simulations (where the forcing was applied using the form (3.2)) whereas the latter when comparing to the spatial and WKBJ analysis of §§ 4.3 and 4.4.
$\tilde{u}$ can be chosen arbitrarily. We use the former when comparing the results with the nonlinear simulations (where the forcing was applied using the form (3.2)) whereas the latter when comparing to the spatial and WKBJ analysis of §§ 4.3 and 4.4.
Based on the results of the local and global analysis at  $We_{in}=1.75$, the convective instability of the flow ensures that, at the outlet, any existing
$We_{in}=1.75$, the convective instability of the flow ensures that, at the outlet, any existing  $k^{+}$ branch, obtained from the spatial analysis, will be transmitted downstream. Since the relevant
$k^{+}$ branch, obtained from the spatial analysis, will be transmitted downstream. Since the relevant  $k^{+}(\unicode[STIX]{x1D714},L)$ branch for a given
$k^{+}(\unicode[STIX]{x1D714},L)$ branch for a given  $\unicode[STIX]{x1D714}$ and at
$\unicode[STIX]{x1D714}$ and at  $z=L$ can be obtained from the local analysis of § 4.3, we impose for the solution of (5.4) at
$z=L$ can be obtained from the local analysis of § 4.3, we impose for the solution of (5.4) at  $z=L$ the spatial response, specifically,
$z=L$ the spatial response, specifically,  $\tilde{h}(L)={\hat{h}}\exp (\text{i}kL)$ and
$\tilde{h}(L)={\hat{h}}\exp (\text{i}kL)$ and  $\tilde{u} (L)=\hat{u} \exp (\text{i}kL)$,
$\tilde{u} (L)=\hat{u} \exp (\text{i}kL)$,  $k$ being the unique root of the dispersion relation corresponding to a downstream amplified wavenumber. It should be noted that, for active systems, such as the jet falling under the influence of gravity, it is not possible a priori to impose unique boundary conditions at the outlet. Thus, substitution of the resolvent response by the spatial response at the outlet should be treated as an approach to close the differential problem of (5.4) rather than depicting the physical boundary conditions. To ensure that these boundary conditions do not affect the final response over a given domain size
$k$ being the unique root of the dispersion relation corresponding to a downstream amplified wavenumber. It should be noted that, for active systems, such as the jet falling under the influence of gravity, it is not possible a priori to impose unique boundary conditions at the outlet. Thus, substitution of the resolvent response by the spatial response at the outlet should be treated as an approach to close the differential problem of (5.4) rather than depicting the physical boundary conditions. To ensure that these boundary conditions do not affect the final response over a given domain size  $L$, we impose them for a domain size
$L$, we impose them for a domain size  $L^{\prime }>L$, such that the response for all the frequencies over
$L^{\prime }>L$, such that the response for all the frequencies over  $L$ is independent of the imposed boundary condition.
$L$ is independent of the imposed boundary condition.
Finally, we express the magnitude of the response  $\tilde{\boldsymbol{s}}$ due to the externally applied forcing in terms of the gain
$\tilde{\boldsymbol{s}}$ due to the externally applied forcing in terms of the gain  $G$, with the maximum gain expressed as
$G$, with the maximum gain expressed as
 $$\begin{eqnarray}G_{max}^{2}(L)=\underset{\unicode[STIX]{x1D714}}{\max }\frac{\Vert \tilde{\boldsymbol{s}}\Vert ^{2}}{\Vert \tilde{f}\Vert ^{2}}=\underset{\unicode[STIX]{x1D714}}{\max }\frac{\Vert (\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1}\unicode[STIX]{x1D63D}_{f}\tilde{f}\Vert ^{2}}{\Vert \tilde{f}\Vert ^{2}},\end{eqnarray}$$
$$\begin{eqnarray}G_{max}^{2}(L)=\underset{\unicode[STIX]{x1D714}}{\max }\frac{\Vert \tilde{\boldsymbol{s}}\Vert ^{2}}{\Vert \tilde{f}\Vert ^{2}}=\underset{\unicode[STIX]{x1D714}}{\max }\frac{\Vert (\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1}\unicode[STIX]{x1D63D}_{f}\tilde{f}\Vert ^{2}}{\Vert \tilde{f}\Vert ^{2}},\end{eqnarray}$$ attained at  $\unicode[STIX]{x1D714}_{opt}$. To measure the amplitude of the response and the forcing, we define
$\unicode[STIX]{x1D714}_{opt}$. To measure the amplitude of the response and the forcing, we define  $\unicode[STIX]{x1D64C}$ and
$\unicode[STIX]{x1D64C}$ and  $\unicode[STIX]{x1D64C}_{f}$ as the weight matrices of the discretised energy norm (
$\unicode[STIX]{x1D64C}_{f}$ as the weight matrices of the discretised energy norm ( $\Vert \tilde{\boldsymbol{s}}\Vert ^{2}=\boldsymbol{s}^{\dagger }\unicode[STIX]{x1D64C}\boldsymbol{s}$) and the forcing norm (
$\Vert \tilde{\boldsymbol{s}}\Vert ^{2}=\boldsymbol{s}^{\dagger }\unicode[STIX]{x1D64C}\boldsymbol{s}$) and the forcing norm ( $\Vert \tilde{f}\Vert ^{2}=f^{\dagger }\unicode[STIX]{x1D64C}_{f}f$), respectively, obtained for the Chebyshev space on the physical domain
$\Vert \tilde{f}\Vert ^{2}=f^{\dagger }\unicode[STIX]{x1D64C}_{f}f$), respectively, obtained for the Chebyshev space on the physical domain  $L$ that is mapped into the interval
$L$ that is mapped into the interval  $-1\leqslant y\leqslant 1$ by using the transformation
$-1\leqslant y\leqslant 1$ by using the transformation  $z=[(L/2)\times (y+1)]$. Here
$z=[(L/2)\times (y+1)]$. Here  $\unicode[STIX]{x1D64C}_{f}$ is a
$\unicode[STIX]{x1D64C}_{f}$ is a  $2N\times 2N$ matrix enabling us to distinguish forcing on
$2N\times 2N$ matrix enabling us to distinguish forcing on  $u$ only or on both components
$u$ only or on both components  $u$ and
$u$ and  $h$. Following the optimisation method using singular value decomposition (SVD) described in Marquet & Sipp (Reference Marquet and Sipp2010) and Garnaud et al. (Reference Garnaud, Lesshafft, Schmid and Huerre2013), we then express the optimal gain using the following eigenvalue problem:
$h$. Following the optimisation method using singular value decomposition (SVD) described in Marquet & Sipp (Reference Marquet and Sipp2010) and Garnaud et al. (Reference Garnaud, Lesshafft, Schmid and Huerre2013), we then express the optimal gain using the following eigenvalue problem:
 $$\begin{eqnarray}\unicode[STIX]{x1D64C}_{f}^{-1}\unicode[STIX]{x1D63D}_{f}^{\dagger }(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1\dagger }\unicode[STIX]{x1D64C}^{\dagger }(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1}\unicode[STIX]{x1D63D}_{f}\tilde{f}=\unicode[STIX]{x1D706}\tilde{f},\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D64C}_{f}^{-1}\unicode[STIX]{x1D63D}_{f}^{\dagger }(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1\dagger }\unicode[STIX]{x1D64C}^{\dagger }(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1}\unicode[STIX]{x1D63D}_{f}\tilde{f}=\unicode[STIX]{x1D706}\tilde{f},\end{eqnarray}$$ whose leading eigenvalue solution  $\unicode[STIX]{x1D706}$ gives
$\unicode[STIX]{x1D706}$ gives  $G_{max}^{2}$ and the associated eigenmode solution
$G_{max}^{2}$ and the associated eigenmode solution  $\tilde{f}$ yields the optimal normalised forcing amplitude in
$\tilde{f}$ yields the optimal normalised forcing amplitude in  $(h,u)$ to be applied at the inlet.
$(h,u)$ to be applied at the inlet.
Since the linear analysis is based on small perturbations, the exact amplitude of the perturbation is unaccounted for in expression (5.5). For the resolvent analysis we then define  $G_{h,fu}$ as the gain in
$G_{h,fu}$ as the gain in  $h$ from a solution forced only in
$h$ from a solution forced only in  $u$ and
$u$ and  $G_{q,fq}$ as the gain in
$G_{q,fq}$ as the gain in  $\boldsymbol{q}$ for a solution forced in
$\boldsymbol{q}$ for a solution forced in  $\boldsymbol{q}$, where
$\boldsymbol{q}$, where  $\boldsymbol{q}=[a,u]$. The two expressions for the gain,
$\boldsymbol{q}=[a,u]$. The two expressions for the gain,  $G_{h,fu}$ and
$G_{h,fu}$ and  $G_{q,fq}$, are formulated to replicate the forcing and gain definitions in the nonlinear simulations (§ 3) and the spatial analysis (§ 4.3 and § 4.4), respectively.
$G_{q,fq}$, are formulated to replicate the forcing and gain definitions in the nonlinear simulations (§ 3) and the spatial analysis (§ 4.3 and § 4.4), respectively.
Looking for the gain in  $G_{q,fq}$ requires the inclusion of additional operators
$G_{q,fq}$ requires the inclusion of additional operators  $\unicode[STIX]{x1D64B}$ and
$\unicode[STIX]{x1D64B}$ and  $\unicode[STIX]{x1D643}$, which express
$\unicode[STIX]{x1D643}$, which express  $\boldsymbol{q}$ in terms of
$\boldsymbol{q}$ in terms of  $\boldsymbol{s}$, and are given by
$\boldsymbol{s}$, and are given by
 $$\begin{eqnarray}\displaystyle & \displaystyle \tilde{\boldsymbol{q}}=\unicode[STIX]{x1D64B}\tilde{\boldsymbol{s}}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \tilde{\boldsymbol{q}}=\unicode[STIX]{x1D64B}\tilde{\boldsymbol{s}}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle \tilde{f}_{q}=\unicode[STIX]{x1D643}\tilde{f}. & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \tilde{f}_{q}=\unicode[STIX]{x1D643}\tilde{f}. & \displaystyle\end{eqnarray}$$ $\unicode[STIX]{x1D643}$ modifies the imposed boundary conditions in terms of
$\unicode[STIX]{x1D643}$ modifies the imposed boundary conditions in terms of  $\tilde{a}$, whereas the operator
$\tilde{a}$, whereas the operator  $\unicode[STIX]{x1D64B}$ adequately expresses the response in
$\unicode[STIX]{x1D64B}$ adequately expresses the response in  $\tilde{a}$ in terms of
$\tilde{a}$ in terms of  $\tilde{h}$ such that
$\tilde{h}$ such that  $\tilde{a}=2h_{b}\tilde{h}$. Additionally, to have an explicit comparison with the spatial analysis, we apply a forcing at the inlet which is obtained as the eigenmode solution of the spatial problem in § 4.3. Thus,
$\tilde{a}=2h_{b}\tilde{h}$. Additionally, to have an explicit comparison with the spatial analysis, we apply a forcing at the inlet which is obtained as the eigenmode solution of the spatial problem in § 4.3. Thus,  $$\begin{eqnarray}\tilde{f}_{q}=\hat{\boldsymbol{q}}(z=0).\end{eqnarray}$$
$$\begin{eqnarray}\tilde{f}_{q}=\hat{\boldsymbol{q}}(z=0).\end{eqnarray}$$The gain for the imposed forcing is then obtained as
 $$\begin{eqnarray}G_{q,fq}^{2}(\unicode[STIX]{x1D714})=\frac{\Vert \tilde{\boldsymbol{q}}\Vert ^{2}}{\Vert \tilde{f_{q}}\Vert ^{2}}=\frac{\Vert \unicode[STIX]{x1D64B}(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1}\unicode[STIX]{x1D63D}_{f}\unicode[STIX]{x1D643}^{-1}\tilde{f}_{q}\Vert ^{2}}{\Vert \tilde{f}_{q}\Vert ^{2}}.\end{eqnarray}$$
$$\begin{eqnarray}G_{q,fq}^{2}(\unicode[STIX]{x1D714})=\frac{\Vert \tilde{\boldsymbol{q}}\Vert ^{2}}{\Vert \tilde{f_{q}}\Vert ^{2}}=\frac{\Vert \unicode[STIX]{x1D64B}(\unicode[STIX]{x1D648}+\text{i}\unicode[STIX]{x1D714}\unicode[STIX]{x1D644})^{-1}\unicode[STIX]{x1D63D}_{f}\unicode[STIX]{x1D643}^{-1}\tilde{f}_{q}\Vert ^{2}}{\Vert \tilde{f}_{q}\Vert ^{2}}.\end{eqnarray}$$ Note, however, that even though this formalism allows a direct comparison with the spatial analysis, the gain  $G_{q,fq}(\unicode[STIX]{x1D714})$ does not represent the maximum optimal gain since we do not impose the optimisation of the inlet forcing vector using an SVD formalism as was done in (5.6). Figure 11 demonstrates the difference between the gain and
$G_{q,fq}(\unicode[STIX]{x1D714})$ does not represent the maximum optimal gain since we do not impose the optimisation of the inlet forcing vector using an SVD formalism as was done in (5.6). Figure 11 demonstrates the difference between the gain and  $\unicode[STIX]{x1D714}_{opt}$ computed using the direct mode from spatial analysis (in black) and through an optimisation problem that solves for the optimal mode (in blue). Indeed, the resolvent gain based on the optimised mode is much larger in magnitude.
$\unicode[STIX]{x1D714}_{opt}$ computed using the direct mode from spatial analysis (in black) and through an optimisation problem that solves for the optimal mode (in blue). Indeed, the resolvent gain based on the optimised mode is much larger in magnitude.

Figure 11. Comparison of the total gain at different frequencies from the resolvent analysis for domain sizes (a)  $L=50$ and (b)
$L=50$ and (b)  $L=60$ and for the jet defined by
$L=60$ and for the jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$. The gain computed by applying the transfer function on the direct eigenmode from the spatial analysis is shown in black and the maximal optimal gain computed through the SVD analysis is shown in blue.
$We_{in}=1.75$. The gain computed by applying the transfer function on the direct eigenmode from the spatial analysis is shown in black and the maximal optimal gain computed through the SVD analysis is shown in blue.
5.2.2 Results: comparison with spatial stability analysis
To replicate the type of forcing and the expression of gain used in the spatial analysis in §§ 4.3 and 4.4, we impose the eigenmode solution at the nozzle exit obtained from the spatial analysis as the forcing vector in the resolvent analysis. The resulting gains  $G_{q,fq}$ for two different fixed domain sizes
$G_{q,fq}$ for two different fixed domain sizes  $L=50$ and
$L=50$ and  $L=60$ are shown in figure 8. We observe from that figure that the inclusion of the amplitude equation in evaluating the spatial response by far improves the estimation of the true gain obtained from the resolvent analysis. Moreover, the predicted
$L=60$ are shown in figure 8. We observe from that figure that the inclusion of the amplitude equation in evaluating the spatial response by far improves the estimation of the true gain obtained from the resolvent analysis. Moreover, the predicted  $\unicode[STIX]{x1D714}_{opt}$ producing the largest
$\unicode[STIX]{x1D714}_{opt}$ producing the largest  $G_{q,fq}$ from the WKBJ analysis is in close agreement with that of the resolvent analysis. The response norm obtained using the different approaches agrees qualitatively (see figure 22 later). Its non-monotonic behaviour at
$G_{q,fq}$ from the WKBJ analysis is in close agreement with that of the resolvent analysis. The response norm obtained using the different approaches agrees qualitatively (see figure 22 later). Its non-monotonic behaviour at  $\unicode[STIX]{x1D714}=1.5$ (see figure 22c–d) is well captured and is in accordance with the work presented in Consoli-Lizzi (Reference Consoli-Lizzi2016). However, the difference in gain between the three methods originates as a result of the quantitative disparity in the response obtained at different frequencies. The divergence between the spatial and resolvent analysis is due to the stretching effect of gravity on the base flow. For a parallel base flow, the results obtained from both methods are found to be identical (as shown in § A.4, figure 21).
$\unicode[STIX]{x1D714}=1.5$ (see figure 22c–d) is well captured and is in accordance with the work presented in Consoli-Lizzi (Reference Consoli-Lizzi2016). However, the difference in gain between the three methods originates as a result of the quantitative disparity in the response obtained at different frequencies. The divergence between the spatial and resolvent analysis is due to the stretching effect of gravity on the base flow. For a parallel base flow, the results obtained from both methods are found to be identical (as shown in § A.4, figure 21).
5.2.3 Results: comparison with nonlinear simulations
We compare the resolvent analysis with the nonlinear simulations of § 3.3. Classically, the optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}$ resulting in the maximum gain can be deduced by plotting the gain
$\unicode[STIX]{x1D714}_{opt}$ resulting in the maximum gain can be deduced by plotting the gain  $G_{h,fu}$ as a function of
$G_{h,fu}$ as a function of  $\unicode[STIX]{x1D714}$ for a fixed domain size
$\unicode[STIX]{x1D714}$ for a fixed domain size  $L$. For capillary jets, however, the domain size over which the perturbation grows cannot be fixed a priori. It is merely an outcome of the analysis, which should compare well with the value of
$L$. For capillary jets, however, the domain size over which the perturbation grows cannot be fixed a priori. It is merely an outcome of the analysis, which should compare well with the value of  $l_{c}$ measured in the nonlinear simulations.
$l_{c}$ measured in the nonlinear simulations.
In order to circumvent this lack of consistency and in the absence of the knowledge of  $l_{c}$, we first plot
$l_{c}$, we first plot  $G_{h,fu}$ as a function of increasing domain sizes
$G_{h,fu}$ as a function of increasing domain sizes  $L$ and for fixed
$L$ and for fixed  $\unicode[STIX]{x1D714}$ as shown in figure 12(a), where the gain
$\unicode[STIX]{x1D714}$ as shown in figure 12(a), where the gain  $G_{h,fu}(\unicode[STIX]{x1D714},L)$ is computed for
$G_{h,fu}(\unicode[STIX]{x1D714},L)$ is computed for  $\unicode[STIX]{x1D714}=[1{-}2.5]$ with
$\unicode[STIX]{x1D714}=[1{-}2.5]$ with  $\unicode[STIX]{x0394}\unicode[STIX]{x1D714}=0.01$ and for
$\unicode[STIX]{x0394}\unicode[STIX]{x1D714}=0.01$ and for  $L=[10{-}240]$ with
$L=[10{-}240]$ with  $\unicode[STIX]{x0394}L=10$. This results in a bundle of constant-frequency curves, intersecting each other at different locations in
$\unicode[STIX]{x0394}L=10$. This results in a bundle of constant-frequency curves, intersecting each other at different locations in  $L$. In figure 12(a) we now define the dominant frequency at a given
$L$. In figure 12(a) we now define the dominant frequency at a given  $L$ as the frequency with the maximum gain at
$L$ as the frequency with the maximum gain at  $L$. A close examination reveals that there is a continuous transition in the dominant frequency as one moves along increasing domain sizes. This is shown in figure 12(b) where for clarity we plot only the envelope
$L$. A close examination reveals that there is a continuous transition in the dominant frequency as one moves along increasing domain sizes. This is shown in figure 12(b) where for clarity we plot only the envelope  $G_{opt}(L)$ of the dominant frequency for all values of
$G_{opt}(L)$ of the dominant frequency for all values of  $L$. Thus
$L$. Thus  $G_{opt}(L)$ is attained for
$G_{opt}(L)$ is attained for  $\unicode[STIX]{x1D714}_{opt}(L)$.
$\unicode[STIX]{x1D714}_{opt}(L)$.

Figure 12. (a) Resolvent gain computed for  $\tilde{h}$ with a forcing applied only in
$\tilde{h}$ with a forcing applied only in  $u$ for different values of domain sizes for a jet defined by
$u$ for different values of domain sizes for a jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$. Each curve is representative of a constant frequency. (b) The dominant frequency envelope as a function of the domain size
$We_{in}=1.75$. Each curve is representative of a constant frequency. (b) The dominant frequency envelope as a function of the domain size  $L$. The gain represented by
$L$. The gain represented by  $10^{2}$,
$10^{2}$,  $10^{4}$ and
$10^{4}$ and  $10^{6}$ is related to forcing amplitudes
$10^{6}$ is related to forcing amplitudes  $\unicode[STIX]{x1D716}=10^{-2}$,
$\unicode[STIX]{x1D716}=10^{-2}$,  $10^{-4}$ and
$10^{-4}$ and  $10^{-6}$, respectively. A horizontal projection from the respective gain on the frequency envelope yields
$10^{-6}$, respectively. A horizontal projection from the respective gain on the frequency envelope yields  $\unicode[STIX]{x1D714}_{opt}$, and a vertical projection from the
$\unicode[STIX]{x1D714}_{opt}$, and a vertical projection from the  $\unicode[STIX]{x1D714}_{opt}$ on
$\unicode[STIX]{x1D714}_{opt}$ on  $L$ determines the breakup length
$L$ determines the breakup length  $l_{c}$.
$l_{c}$.

Figure 13. Comparison of breakup characteristics obtained from the nonlinear simulations (figure 3) and the resolvent analysis (figure 12) for a jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$ for (a) the optimal forcing frequency
$We_{in}=1.75$ for (a) the optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}$ and (b) the breakup length
$\unicode[STIX]{x1D714}_{opt}$ and (b) the breakup length  $l_{c}$ at different inverse forcing amplitudes
$l_{c}$ at different inverse forcing amplitudes  $1/\unicode[STIX]{x1D716}$.
$1/\unicode[STIX]{x1D716}$.
As discussed previously,  $L$ represents the breakup location along the jet where the nonlinear effects appear. Broadly speaking, nonlinearity enters the system when a small perturbation
$L$ represents the breakup location along the jet where the nonlinear effects appear. Broadly speaking, nonlinearity enters the system when a small perturbation  $\unicode[STIX]{x1D716}$ gives rise to a response of the order of 1, which suggests approximating
$\unicode[STIX]{x1D716}$ gives rise to a response of the order of 1, which suggests approximating  $l_{c}$ by the value of
$l_{c}$ by the value of  $L$ at which
$L$ at which
 $$\begin{eqnarray}G_{opt}(l_{c})\approx \frac{1}{\unicode[STIX]{x1D716}}.\end{eqnarray}$$
$$\begin{eqnarray}G_{opt}(l_{c})\approx \frac{1}{\unicode[STIX]{x1D716}}.\end{eqnarray}$$ In other words, the gain at the breakup location  $L=l_{c}$ should be equal to
$L=l_{c}$ should be equal to  $1/\unicode[STIX]{x1D716}$.
$1/\unicode[STIX]{x1D716}$.
Using (5.10), we locate the gain in figure 12(b) for different forcing amplitudes  $\unicode[STIX]{x1D716}=[10^{-2}{-}10^{-6}]$. At the given value of
$\unicode[STIX]{x1D716}=[10^{-2}{-}10^{-6}]$. At the given value of  $G_{h,fu}$, a horizontal projection on the dominant frequency envelope will then decide the optimal forcing frequency for the given
$G_{h,fu}$, a horizontal projection on the dominant frequency envelope will then decide the optimal forcing frequency for the given  $\unicode[STIX]{x1D716}$. Finally, a vertical projection on
$\unicode[STIX]{x1D716}$. Finally, a vertical projection on  $L$ from the intersection point on the dominant frequency envelope will provide the relevant breakup length
$L$ from the intersection point on the dominant frequency envelope will provide the relevant breakup length  $l_{c}$ for the forcing amplitude
$l_{c}$ for the forcing amplitude  $\unicode[STIX]{x1D716}$. Extracting the results from figure 12(b), we compare the optimal forcing frequency and the breakup length for different
$\unicode[STIX]{x1D716}$. Extracting the results from figure 12(b), we compare the optimal forcing frequency and the breakup length for different  $\unicode[STIX]{x1D716}$ with the nonlinear solutions of § 3.3 in figure 13. The close quantitative agreement between the two approaches shows the strength of the resolvent analysis in predicting the
$\unicode[STIX]{x1D716}$ with the nonlinear solutions of § 3.3 in figure 13. The close quantitative agreement between the two approaches shows the strength of the resolvent analysis in predicting the  $\unicode[STIX]{x1D714}_{opt}$ and
$\unicode[STIX]{x1D714}_{opt}$ and  $l_{c}$ especially without any prior information from the nonlinear simulations. In figure 13 the small difference in values in the two methods can probably be attributed to ad hoc definition of the required threshold for nonlinear effects to kick in and breakup to occur. Finally, we would like to remind the reader that the dependence of
$l_{c}$ especially without any prior information from the nonlinear simulations. In figure 13 the small difference in values in the two methods can probably be attributed to ad hoc definition of the required threshold for nonlinear effects to kick in and breakup to occur. Finally, we would like to remind the reader that the dependence of  $\unicode[STIX]{x1D714}_{opt}$ and
$\unicode[STIX]{x1D714}_{opt}$ and  $l_{c}$ on the forcing amplitude
$l_{c}$ on the forcing amplitude  $\unicode[STIX]{x1D716}$, from the linear and nonlinear analysis presented above, qualitatively agrees with the linear results reported in Consoli-Lizzi (Reference Consoli-Lizzi2016).
$\unicode[STIX]{x1D716}$, from the linear and nonlinear analysis presented above, qualitatively agrees with the linear results reported in Consoli-Lizzi (Reference Consoli-Lizzi2016).
Note here that the jet breakup is a local phenomenon and conventionally the norm of the signal at  $L$ is used to define the breakup. However, in a global analysis, the pointwise norm of the field is not a definite norm. Using the infinity norm to define the breakup would have been an option, but is really not well suited to optimal growth calculations (see Foures, Caulfield & Schmid (Reference Foures, Caulfield and Schmid2013) for a discussion). Hence, in our resolvent, spatial and WKBJ analysis, we always use an integral norm, the 2-norm, for the definition of the spatial gain.
$L$ is used to define the breakup. However, in a global analysis, the pointwise norm of the field is not a definite norm. Using the infinity norm to define the breakup would have been an option, but is really not well suited to optimal growth calculations (see Foures, Caulfield & Schmid (Reference Foures, Caulfield and Schmid2013) for a discussion). Hence, in our resolvent, spatial and WKBJ analysis, we always use an integral norm, the 2-norm, for the definition of the spatial gain.
6 Response to white noise
Up to now, we have only been interested in the response of the jet to an external disturbance characterised by a constant forcing frequency. However, in reality, the external disturbance is more likely to be composed of a broadband frequency rather than being harmonic. Thus, to model this physical perturbation, we carry out nonlinear simulations consistent with the scheme presented in § 3 by exciting the jet at the nozzle by white noise  $\unicode[STIX]{x1D709}(t)$ defined in the time interval
$\unicode[STIX]{x1D709}(t)$ defined in the time interval  $[0,~T]$ and formulated in a similar way as in Mantič-Lugo & Gallaire (Reference Mantič-Lugo and Gallaire2016). The white noise signal
$[0,~T]$ and formulated in a similar way as in Mantič-Lugo & Gallaire (Reference Mantič-Lugo and Gallaire2016). The white noise signal  $\unicode[STIX]{x1D709}(t)$ is characterised by a constant power spectral density (PSD)
$\unicode[STIX]{x1D709}(t)$ is characterised by a constant power spectral density (PSD)  $S_{\unicode[STIX]{x1D709}\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})=|\hat{\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})|^{2}$, where
$S_{\unicode[STIX]{x1D709}\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})=|\hat{\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})|^{2}$, where  $\hat{\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})$ is the Fourier transform of
$\hat{\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})$ is the Fourier transform of  $\unicode[STIX]{x1D709}(t)$ and has an infinite power
$\unicode[STIX]{x1D709}(t)$ and has an infinite power  $P$ defined as
$P$ defined as
 $$\begin{eqnarray}P=\frac{1}{T}\int _{0}^{T}|\unicode[STIX]{x1D709}_{T}(t)|^{2}\,\text{d}t=\frac{1}{\unicode[STIX]{x03C0}}\int _{0}^{\infty }|\hat{\unicode[STIX]{x1D709}}|^{2}\,\text{d}\unicode[STIX]{x1D714}=\unicode[STIX]{x1D70E}^{2},\end{eqnarray}$$
$$\begin{eqnarray}P=\frac{1}{T}\int _{0}^{T}|\unicode[STIX]{x1D709}_{T}(t)|^{2}\,\text{d}t=\frac{1}{\unicode[STIX]{x03C0}}\int _{0}^{\infty }|\hat{\unicode[STIX]{x1D709}}|^{2}\,\text{d}\unicode[STIX]{x1D714}=\unicode[STIX]{x1D70E}^{2},\end{eqnarray}$$ where  $\unicode[STIX]{x1D70E}$ is the variance. Even though pure white noise has infinite power (as
$\unicode[STIX]{x1D70E}$ is the variance. Even though pure white noise has infinite power (as  $S_{\unicode[STIX]{x1D709}\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})>0$), physical systems are usually characterised by a band-limited white noise. We thus filter the digital random signal
$S_{\unicode[STIX]{x1D709}\unicode[STIX]{x1D709}}(\unicode[STIX]{x1D714})>0$), physical systems are usually characterised by a band-limited white noise. We thus filter the digital random signal  $\unicode[STIX]{x1D709}_{d}(t)$ with a band limiting frequency
$\unicode[STIX]{x1D709}_{d}(t)$ with a band limiting frequency  $\unicode[STIX]{x1D714}_{b}/2\unicode[STIX]{x03C0}=1$ to obtain the band-limited white noise
$\unicode[STIX]{x1D714}_{b}/2\unicode[STIX]{x03C0}=1$ to obtain the band-limited white noise  $\unicode[STIX]{x1D709}_{b}(t)$ as shown in figure 14. For
$\unicode[STIX]{x1D709}_{b}(t)$ as shown in figure 14. For  $\unicode[STIX]{x1D709}_{d}(t)$, the Nyquist frequency is set by
$\unicode[STIX]{x1D709}_{d}(t)$, the Nyquist frequency is set by  $\unicode[STIX]{x1D714}_{N}/2\unicode[STIX]{x03C0}$, which depends on the time step (
$\unicode[STIX]{x1D714}_{N}/2\unicode[STIX]{x03C0}$, which depends on the time step ( $\unicode[STIX]{x1D6FF}t$) of the signal, such that
$\unicode[STIX]{x1D6FF}t$) of the signal, such that  $\unicode[STIX]{x1D714}_{N}/2\unicode[STIX]{x03C0}=1/2\unicode[STIX]{x1D6FF}t$. Here we chose
$\unicode[STIX]{x1D714}_{N}/2\unicode[STIX]{x03C0}=1/2\unicode[STIX]{x1D6FF}t$. Here we chose  $\unicode[STIX]{x1D6FF}t=0.01$. The noise
$\unicode[STIX]{x1D6FF}t=0.01$. The noise  $\unicode[STIX]{x1D709}_{b}(t)$ is normalised to have zero mean, unit variance and unit power, with a constant value for the PSD, where
$\unicode[STIX]{x1D709}_{b}(t)$ is normalised to have zero mean, unit variance and unit power, with a constant value for the PSD, where  $2|\hat{\unicode[STIX]{x1D709}_{b}}|^{2}=2\unicode[STIX]{x03C0}/\unicode[STIX]{x1D714}_{b}$, which completely depends on the band limiting frequency. Finally, we impose this filtered white noise as an inlet velocity condition for the jet defined by
$2|\hat{\unicode[STIX]{x1D709}_{b}}|^{2}=2\unicode[STIX]{x03C0}/\unicode[STIX]{x1D714}_{b}$, which completely depends on the band limiting frequency. Finally, we impose this filtered white noise as an inlet velocity condition for the jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$ and governed by the equations (3.1) by replacing the boundary condition (3.2) with
$We_{in}=1.75$ and governed by the equations (3.1) by replacing the boundary condition (3.2) with
 $$\begin{eqnarray}\left.\frac{\text{d}u}{\text{d}t}\right|_{(0,t)}=\unicode[STIX]{x1D716}\unicode[STIX]{x1D709}_{b}(t),\end{eqnarray}$$
$$\begin{eqnarray}\left.\frac{\text{d}u}{\text{d}t}\right|_{(0,t)}=\unicode[STIX]{x1D716}\unicode[STIX]{x1D709}_{b}(t),\end{eqnarray}$$ where  $\unicode[STIX]{x1D716}$ is the amplitude of the white noise signal. The forcing is applied at two different amplitudes,
$\unicode[STIX]{x1D716}$ is the amplitude of the white noise signal. The forcing is applied at two different amplitudes,  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $10^{-4}$, and for large times (
$10^{-4}$, and for large times ( $T=2000$) so as to achieve results that are time-independent. For the MATLAB solver ode23tb with varying step size, the maximum time step size is set as
$T=2000$) so as to achieve results that are time-independent. For the MATLAB solver ode23tb with varying step size, the maximum time step size is set as  $\unicode[STIX]{x1D6FF}t$ and white noise for intermediate time steps is obtained through interpolation.
$\unicode[STIX]{x1D6FF}t$ and white noise for intermediate time steps is obtained through interpolation.

Figure 14. (a) White noise signal with unit power, comparing a signal without filter and filtered using a band limiting frequency  $\unicode[STIX]{x1D714}_{b}/2\unicode[STIX]{x03C0}$. (b) PSD comparison of these two signals with their theoretical value. The PSD is estimated using a Welch method in MATLAB.
$\unicode[STIX]{x1D714}_{b}/2\unicode[STIX]{x03C0}$. (b) PSD comparison of these two signals with their theoretical value. The PSD is estimated using a Welch method in MATLAB.
At every pinch-off on the jet, we note the breakup length  $l_{c}$, the pinch-off period
$l_{c}$, the pinch-off period  $\unicode[STIX]{x0394}T_{po}$ and the drop radius
$\unicode[STIX]{x0394}T_{po}$ and the drop radius  $R_{drop}$ at the time of breakup. The distribution of the breakup characteristics is shown as a histogram in figures 15 and 16 and compared with the expected response of the jet in the presence of the pure
$R_{drop}$ at the time of breakup. The distribution of the breakup characteristics is shown as a histogram in figures 15 and 16 and compared with the expected response of the jet in the presence of the pure  $\unicode[STIX]{x1D714}_{opt}(\unicode[STIX]{x1D716})$, which corresponds to
$\unicode[STIX]{x1D714}_{opt}(\unicode[STIX]{x1D716})$, which corresponds to  $\unicode[STIX]{x1D714}_{opt}=1.38$ and
$\unicode[STIX]{x1D714}_{opt}=1.38$ and  $1.65$ for
$1.65$ for  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $10^{-4}$, respectively. The breakup characteristics for
$10^{-4}$, respectively. The breakup characteristics for  $\unicode[STIX]{x1D714}_{opt}$ have been discussed in figure 2 and are depicted by red bars in figures 15 and 16.
$\unicode[STIX]{x1D714}_{opt}$ have been discussed in figure 2 and are depicted by red bars in figures 15 and 16.
The drop size distribution shown in figure 15(a) highlights the two distribution peaks concentrated around  ${\approx}0.9$ and
${\approx}0.9$ and  ${\approx}1.65$, representing the group of satellite and main drops, respectively. This behaviour also exists for smaller
${\approx}1.65$, representing the group of satellite and main drops, respectively. This behaviour also exists for smaller  $\unicode[STIX]{x1D716}=10^{-4}$, where the radius is aggregated at
$\unicode[STIX]{x1D716}=10^{-4}$, where the radius is aggregated at  ${\approx}1.05$ and
${\approx}1.05$ and  ${\approx}1.45$. The results for the main drop size are coherent with the ones obtained in the presence of pure optimal forcing, where
${\approx}1.45$. The results for the main drop size are coherent with the ones obtained in the presence of pure optimal forcing, where  $R_{drop}=1.62$ and
$R_{drop}=1.62$ and  $1.45$ for
$1.45$ for  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $10^{-4}$, respectively. Thus, even in the presence of white noise, the response of the jet is dominated by its expected behaviour at
$10^{-4}$, respectively. Thus, even in the presence of white noise, the response of the jet is dominated by its expected behaviour at  $\unicode[STIX]{x1D714}_{opt}$.
$\unicode[STIX]{x1D714}_{opt}$.

Figure 15. Comparison of the normalised frequency of the drop radius  $R_{drop}$ for a jet defined by
$R_{drop}$ for a jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$ and being forced at amplitude (a)
$We_{in}=1.75$ and being forced at amplitude (a)  $\unicode[STIX]{x1D716}=10^{-2}$ and (b)
$\unicode[STIX]{x1D716}=10^{-2}$ and (b)  $\unicode[STIX]{x1D716}=10^{-4}$ by their respective optimal forcing frequency
$\unicode[STIX]{x1D716}=10^{-4}$ by their respective optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}$ (in red bars) and white noise (in cyan bars). For both the amplitudes, the white noise data are concentrated around two main drop sizes, representatives of the main and satellite drops. The most frequent drop sizes are
$\unicode[STIX]{x1D714}_{opt}$ (in red bars) and white noise (in cyan bars). For both the amplitudes, the white noise data are concentrated around two main drop sizes, representatives of the main and satellite drops. The most frequent drop sizes are  $R_{drop}=1.65$ and
$R_{drop}=1.65$ and  $1.45$ for
$1.45$ for  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $10^{-4}$, respectively. These values are close to the ones predicted by the nonlinear simulations of figure 2, where the main drop size was predicted to be
$10^{-4}$, respectively. These values are close to the ones predicted by the nonlinear simulations of figure 2, where the main drop size was predicted to be  $1.62$ and
$1.62$ and  $1.48$ for
$1.48$ for  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $10^{-4}$, respectively.
$10^{-4}$, respectively.

Figure 16. (a,b) Comparison of the normalised frequency of the breakup length  $l_{c}$ and (c,d) comparison of the normalised frequency of the breakup period
$l_{c}$ and (c,d) comparison of the normalised frequency of the breakup period  $\unicode[STIX]{x0394}T_{po}$, each for a jet defined by
$\unicode[STIX]{x0394}T_{po}$, each for a jet defined by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $Bo_{in}=0.1$ and
$Bo_{in}=0.1$ and  $We_{in}=1.75$: (a,c) are subjected to a forcing amplitude
$We_{in}=1.75$: (a,c) are subjected to a forcing amplitude  $\unicode[STIX]{x1D716}=10^{-2}$ and (b,d) to
$\unicode[STIX]{x1D716}=10^{-2}$ and (b,d) to  $\unicode[STIX]{x1D716}=10^{-4}$. The data in red correspond to the optimal forcing frequency
$\unicode[STIX]{x1D716}=10^{-4}$. The data in red correspond to the optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}$ and data in cyan to white noise. The most frequent white noise breakup length is close to the
$\unicode[STIX]{x1D714}_{opt}$ and data in cyan to white noise. The most frequent white noise breakup length is close to the  $l_{c}$ prediction in the presence of the
$l_{c}$ prediction in the presence of the  $\unicode[STIX]{x1D714}_{opt}$. For
$\unicode[STIX]{x1D714}_{opt}$. For  $\unicode[STIX]{x1D716}=10^{-2}$ and
$\unicode[STIX]{x1D716}=10^{-2}$ and  $10^{-4}$, the peak breakup period
$10^{-4}$, the peak breakup period  $\unicode[STIX]{x0394}T_{po}=2.45$ and
$\unicode[STIX]{x0394}T_{po}=2.45$ and  $1.35$, respectively, and is in close proximity to the results obtained from the nonlinear simulations of figure 2.
$1.35$, respectively, and is in close proximity to the results obtained from the nonlinear simulations of figure 2.
Unlike the drop radius, the peak of the distribution of breakup length obtained by imposing the white noise is not in close agreement with that of the optimal forcing as shown in figure 16(a,b). Yet, we clearly see that the distribution spectrum shifts to large values of breakup length as  $\unicode[STIX]{x1D716}$ is decreased, a behaviour similar to the one predicted by
$\unicode[STIX]{x1D716}$ is decreased, a behaviour similar to the one predicted by  $\unicode[STIX]{x1D714}_{opt}$, where
$\unicode[STIX]{x1D714}_{opt}$, where  $l_{c}$ increases from
$l_{c}$ increases from  ${\approx}50$ to
${\approx}50$ to  ${\approx}125$ as
${\approx}125$ as  $\unicode[STIX]{x1D716}$ is decreased. The distribution spectrum shifts due to the presence of forcing frequencies other than the optimal one, owing to which the breakup length is known to show a large variation, as is evident from figure 1. In the absence of white noise, a similar rationale should not be applied when evaluating the effect of a given pair of forcing frequencies. Indeed, their collective effect on the breakup characteristics could be different from their individual responses, as was demonstrated in the case of parallel jets (Driessen et al. Reference Driessen, Sleutel, Dijksman, Jeurissen and Lohse2014).
$\unicode[STIX]{x1D716}$ is decreased. The distribution spectrum shifts due to the presence of forcing frequencies other than the optimal one, owing to which the breakup length is known to show a large variation, as is evident from figure 1. In the absence of white noise, a similar rationale should not be applied when evaluating the effect of a given pair of forcing frequencies. Indeed, their collective effect on the breakup characteristics could be different from their individual responses, as was demonstrated in the case of parallel jets (Driessen et al. Reference Driessen, Sleutel, Dijksman, Jeurissen and Lohse2014).
Similar conclusions can be drawn for the comparison of  $\unicode[STIX]{x0394}T_{po}$ between white noise forcing and forcing with
$\unicode[STIX]{x0394}T_{po}$ between white noise forcing and forcing with  $\unicode[STIX]{x1D714}_{opt}$ from figure 16(c,d) where we plot the breakup period between two consecutive drops.
$\unicode[STIX]{x1D714}_{opt}$ from figure 16(c,d) where we plot the breakup period between two consecutive drops.
7 Conclusion and perspectives
In this work, we inspect the response of a spatially varying gravitationally stretched jet subjected to an inlet velocity perturbation. The forcing is characterised through the frequency and the amplitude, the latter playing a major role in the determination of the optimal forcing frequency. The results of the numerical simulations performed on the nonlinear 1-D Eggers & Dupont (Reference Eggers and Dupont1994) equations show an increase in optimal forcing frequency and the breakup length as the forcing amplitude is decreased. We found that the amplitude-dependent preferred mode is a characteristic of gravity-driven jets only. A pure capillary jet, the base state of which is independent of gravity-induced stretching, does not sustain such behaviour. In such cases, decreasing the forcing amplitude only resulted in an increase of the breakup length, with the optimal frequency remaining fixed at all amplitudes.
The linear stability theory characterised the jet flow used for nonlinear simulations as locally unstable and globally stable. Based on the absolute–convective transition criteria, we analysed the local stability at each section along the axial direction. The solution of the dispersion relation and the subsequent analysis for the downstream-propagating spatial waves helped in confirming the predominant wave to be used for the zeroth-order spatial gain expression. The strong non-parallelism of the base flow close to the nozzle motivated the incorporation of the WKBJ framework, which markedly improved the prediction of the optimal forcing frequency in comparison to the resolvent analysis. However, the spatial gain was still observed to be lower than the resolvent. As suggested by Le Dizès & Villermaux (Reference Le Dizès and Villermaux2017), using advanced stability tools (Schmid Reference Schmid2007), which accounts for non-parallel effects and non-modal growth, leads to an estimation of a more realistic spatial response.
This task was tackled using a resolvent analysis, which accurately captured the linear response of stable jets in the presence of an external forcing. Assuming a simple global amplitude breakup threshold criterion, the linear resolvent analysis becomes capable of predicting both the breakup length and the optimal forcing frequency given the amplitude of the forcing. The results of the nonlinear simulations and the resolvent for different forcing amplitudes are quantitatively comparable, thus underlining the importance of the resolvent analysis. Additionally, the results have a qualitative agreement with the linear response analysis presented in Consoli-Lizzi (Reference Consoli-Lizzi2016). Besides forcing the jet inlet with a fixed frequency, we also studied the response to white noise, to analyse its natural response to a distributed forcing frequency range. Surprisingly, even in the presence of white noise, the dominant response of the jet is close to that seen from the optimal frequency at that amplitude. These simulations also indicate the plausible reasons behind the large deviation observed for the frequency and breakup length in the unforced jet experiments of Consoli-Lizzi (Reference Consoli-Lizzi2016).
In the presence of external forcing, a dominant feature seen from the nonlinear simulations is the formation of a main and a satellite drop at the time of breakup. Nevertheless, to properly examine the consequence of the forcing amplitude on the final drop size, there is a need to enhance the nonlinear model by including the physics of drop coalescence and disintegration, as done by Driessen & Jeurissen (Reference Driessen and Jeurissen2011). Post breakup, the state of the jet after the pinch-off should be inferred from the system before the breakup. Additionally, the choice for drop curvature is of paramount importance since a given breakup can possess a variety of drop shapes – each on a different length scale (Kowalewski Reference Kowalewski1996).
On a different note, if the final aim is to eliminate the presence of satellite drops, the forcing should be modified such that it leads to the selective production of equi-sized drops. In this direction the work of Chaudhary & Redekopp (Reference Chaudhary and Redekopp1980), who controlled satellite drops by forcing the jet with a suitable harmonic added to the fundamental, and Driessen et al. (Reference Driessen, Sleutel, Dijksman, Jeurissen and Lohse2014), who controlled the size of the droplet breaking off from a parallel jet by imposing a superposition of two Rayleigh–Plateau-unstable modes on the jet, could serve as the basis for formulating a theory for spatially varying gravity jets.
Acknowledgements
I.S. thanks the Swiss National Science Foundation (grant no. 200021-159957). The authors would like to thank E. Yim for extremely valuable discussions on the modelling of white noise disturbance and in the interpretation of the local/global response. The authors would also like to thank T. Ansaldi and G. Rocca, who worked on the foundation of the numerical code for parallel jets, as well as A. J. P. Bressy for efficiently performing several simulations on the enhanced version of the numerical code provided to him.
Declaration of interests
The authors report no conflict of interest.
Appendix A
A.1 Numerical base-state solution validation
In this appendix, we show the validation of our numerically obtained base-state solution of the governing equation (2.5) with the experimental results of Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013) for three different jet flows. The MATLAB bvp4c solver along with the boundary conditions stated in § 2 accurately capture the stretching (necking) close to the nozzle due to the effect of  $Bo_{in}$ as shown in figure 17.
$Bo_{in}$ as shown in figure 17.

Figure 17. Comparison of the steady-state solution with results from Rubio-Rubio et al. (Reference Rubio-Rubio, Sevilla and Gordillo2013) for: (a)  $Oh_{in}=2.117$,
$Oh_{in}=2.117$,  $We_{in}=2.62\times 10^{-2}$,
$We_{in}=2.62\times 10^{-2}$,  $Bo_{in}=0.71$; (b)
$Bo_{in}=0.71$; (b)  $Oh_{in}=0.4799$,
$Oh_{in}=0.4799$,  $We_{in}=6.06\times 10^{-3}$,
$We_{in}=6.06\times 10^{-3}$,  $Bo_{in}=1.81$; and (c)
$Bo_{in}=1.81$; and (c)  $Oh_{in}=0.7238$,
$Oh_{in}=0.7238$,  $We_{in}=1.85\times 10^{-3}$,
$We_{in}=1.85\times 10^{-3}$,  $Bo_{in}=5.53$.
$Bo_{in}=5.53$.
A.2 Effect of initial condition on breakup characteristics
This section demonstrates the effect on breakup characteristics due to different initial conditions of the jet. Using the scheme described in § 3.2, we perform numerical solutions for a jet with  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $We_{in}=1.75$ and
$We_{in}=1.75$ and  $Bo_{in}=0.1$ excited with a forcing of amplitude
$Bo_{in}=0.1$ excited with a forcing of amplitude  $\unicode[STIX]{x1D716}=10^{-2}$ and frequency
$\unicode[STIX]{x1D716}=10^{-2}$ and frequency  $\unicode[STIX]{x1D714}=0.8$. In the first case, the jet is initialised as a circular tip of radius 1 (figure 18a), and in the second case with the base-state solution obtained by solving (2.5) defined for an axial length of 100 (figure 18b). In both cases the numerical domain is considered large enough to capture all the breakups. As shown in figure 18, both the jets with different initial conditions have different transient dynamics up to
$\unicode[STIX]{x1D714}=0.8$. In the first case, the jet is initialised as a circular tip of radius 1 (figure 18a), and in the second case with the base-state solution obtained by solving (2.5) defined for an axial length of 100 (figure 18b). In both cases the numerical domain is considered large enough to capture all the breakups. As shown in figure 18, both the jets with different initial conditions have different transient dynamics up to  $t=55$ (tip) and
$t=55$ (tip) and  $t=40$ (base state) after which they enter the permanent regime. In this regime, the breakup length
$t=40$ (base state) after which they enter the permanent regime. In this regime, the breakup length  $l_{c}$ and period
$l_{c}$ and period  $\unicode[STIX]{x0394}T_{po}$ are identical as shown in figure 18(c,d), respectively. It is thus safe to conclude that, in the permanent regime, the jet breakup is independent of the initial base-state solution.
$\unicode[STIX]{x0394}T_{po}$ are identical as shown in figure 18(c,d), respectively. It is thus safe to conclude that, in the permanent regime, the jet breakup is independent of the initial base-state solution.

Figure 18. Time-sequence plot of a simulation with  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $We_{in}=1.75$ and
$We_{in}=1.75$ and  $Bo_{in}=0.1$ excited with a forcing of amplitude
$Bo_{in}=0.1$ excited with a forcing of amplitude  $\unicode[STIX]{x1D716}=10^{-2}$ and frequency
$\unicode[STIX]{x1D716}=10^{-2}$ and frequency  $\unicode[STIX]{x1D714}=0.8$ and initialised (a) as a tip and (b) using the base-state solution. Comparisons of the breakup length and period for the two cases are presented in (c) and (d), respectively.
$\unicode[STIX]{x1D714}=0.8$ and initialised (a) as a tip and (b) using the base-state solution. Comparisons of the breakup length and period for the two cases are presented in (c) and (d), respectively.
A.3 Numerical scheme validation
In this appendix, we show the validation of our numerical scheme described in § 3.2 for the simulations of reduced 1-D Eggers & Dupont (Reference Eggers and Dupont1994) equations represented by equation (3.1). For the purpose of validation, we use the numerical data of van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010), which are described for micro-jets of initial radius  $h_{0}=18.5~\unicode[STIX]{x03BC}\text{m}$ with density
$h_{0}=18.5~\unicode[STIX]{x03BC}\text{m}$ with density  $\unicode[STIX]{x1D70C}=1098~\text{kg}~\text{m}^{-3}$, viscosity
$\unicode[STIX]{x1D70C}=1098~\text{kg}~\text{m}^{-3}$, viscosity  $\unicode[STIX]{x1D702}=3.65~\text{mPa}~\text{s}$ and surface tension
$\unicode[STIX]{x1D702}=3.65~\text{mPa}~\text{s}$ and surface tension  $\unicode[STIX]{x1D6FE}=67.9~\text{mN}~\text{m}^{-1}$. The jet is injected at a constant flow rate
$\unicode[STIX]{x1D6FE}=67.9~\text{mN}~\text{m}^{-1}$. The jet is injected at a constant flow rate  $Q=0.35~\text{ml}~\text{min}^{-1}$, corresponding to an initial jet velocity
$Q=0.35~\text{ml}~\text{min}^{-1}$, corresponding to an initial jet velocity  $U_{0}=Q/(\unicode[STIX]{x03C0}h_{0}^{2})=5.4~\text{m}~\text{s}^{-1}$. The flow can thus be described by the dimensionless numbers
$U_{0}=Q/(\unicode[STIX]{x03C0}h_{0}^{2})=5.4~\text{m}~\text{s}^{-1}$. The flow can thus be described by the dimensionless numbers  $Oh_{in}=0.1$ and
$Oh_{in}=0.1$ and  $We_{in}=8.7$. Since the gravity effects are not considered in the experiment, we inject
$We_{in}=8.7$. Since the gravity effects are not considered in the experiment, we inject  $Bo_{in}=0$ in (3.1). To initiate jet breakup in their numerical simulations, a harmonic modulation of the dimensional nozzle radius is applied as follows:
$Bo_{in}=0$ in (3.1). To initiate jet breakup in their numerical simulations, a harmonic modulation of the dimensional nozzle radius is applied as follows:
 $$\begin{eqnarray}h(z=0,t)=h_{0}+\unicode[STIX]{x1D6FF}\sin (2\unicode[STIX]{x03C0}nt),\end{eqnarray}$$
$$\begin{eqnarray}h(z=0,t)=h_{0}+\unicode[STIX]{x1D6FF}\sin (2\unicode[STIX]{x03C0}nt),\end{eqnarray}$$ with  $\unicode[STIX]{x1D6FF}/h_{0}\approx 0.005$ the forcing amplitude and
$\unicode[STIX]{x1D6FF}/h_{0}\approx 0.005$ the forcing amplitude and  $n$ the driving frequency. The latter is selected to match the optimum wavelength
$n$ the driving frequency. The latter is selected to match the optimum wavelength  $\unicode[STIX]{x1D706}_{opt}$ for jet breakup, that is,
$\unicode[STIX]{x1D706}_{opt}$ for jet breakup, that is,  $n=U_{0}/\unicode[STIX]{x1D706}_{opt}$. To ensure a constant flow rate
$n=U_{0}/\unicode[STIX]{x1D706}_{opt}$. To ensure a constant flow rate  $Q$ through the nozzle, the dimensional velocity is modulated correspondingly as
$Q$ through the nozzle, the dimensional velocity is modulated correspondingly as
 $$\begin{eqnarray}u_{0}(z=0,t)=\frac{h_{0}^{2}U_{0}}{[h(z=0,t)]^{2}}.\end{eqnarray}$$
$$\begin{eqnarray}u_{0}(z=0,t)=\frac{h_{0}^{2}U_{0}}{[h(z=0,t)]^{2}}.\end{eqnarray}$$ The amplitude of the wave imparted by the forcing at the nozzle grows until it equals the radius of the jet. Pinch-off or jet breakup is then defined as when the minimum width of the jet is below a predefined value set to  $10^{-3}h_{0}$.
$10^{-3}h_{0}$.

Figure 19. Numerical solutions of the governing equation (3.1) for a jet in an inert medium with  $Oh_{in}=0.1$,
$Oh_{in}=0.1$,  $We_{in}=8.7$ and
$We_{in}=8.7$ and  $Bo_{in}=0$. (a) Results from our numerical scheme described in § 3.2 and (b) experimentally validated numerical results of van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010). The red bar corresponds to a length scale of
$Bo_{in}=0$. (a) Results from our numerical scheme described in § 3.2 and (b) experimentally validated numerical results of van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010). The red bar corresponds to a length scale of  $200~\unicode[STIX]{x03BC}\text{m}$.
$200~\unicode[STIX]{x03BC}\text{m}$.

Figure 20. Nonlinear simulation results for optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}$ carried out for jet characteristics
$\unicode[STIX]{x1D714}_{opt}$ carried out for jet characteristics  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $We_{in}=1.75$ and
$We_{in}=1.75$ and  $Bo_{in}=0$. The breakup length
$Bo_{in}=0$. The breakup length  $l_{c}$ is plotted as a function of forcing frequency
$l_{c}$ is plotted as a function of forcing frequency  $\unicode[STIX]{x1D714}$ for different forcing amplitudes
$\unicode[STIX]{x1D714}$ for different forcing amplitudes  $\unicode[STIX]{x1D716}$.
$\unicode[STIX]{x1D716}$.
In our numerical simulations, we compute solutions to the governing equation (3.1) with the same harmonic forcing and flow parameters as in van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010). A hemispherical droplet described by  $h=({h_{0}}^{2}-z^{2})^{1/2}$ is used as initial condition for the shape of the jet, the tip of which is therefore initially at
$h=({h_{0}}^{2}-z^{2})^{1/2}$ is used as initial condition for the shape of the jet, the tip of which is therefore initially at  $z=h_{0}$. The velocity is initialised to
$z=h_{0}$. The velocity is initialised to  $u_{0}$ everywhere along the jet. A fixed number of grid points, corresponding to a discretisation size
$u_{0}$ everywhere along the jet. A fixed number of grid points, corresponding to a discretisation size  $\text{d}z=0.05$, is uniformly distributed throughout the entire domain. The final validation is presented in figure 19, which shows a comparison of the time series of the dynamics of jet breakup obtained from our numerical scheme and the numerical results from van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010).
$\text{d}z=0.05$, is uniformly distributed throughout the entire domain. The final validation is presented in figure 19, which shows a comparison of the time series of the dynamics of jet breakup obtained from our numerical scheme and the numerical results from van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010).
For both parts of figure 19, the evolution of the jet shape is shown at time intervals of  $2~\unicode[STIX]{x03BC}\text{s}$. Our numerical model predicts a breakup period of
$2~\unicode[STIX]{x03BC}\text{s}$. Our numerical model predicts a breakup period of  $25~\unicode[STIX]{x03BC}\text{s}$ and a breakup length of
$25~\unicode[STIX]{x03BC}\text{s}$ and a breakup length of  $856~\unicode[STIX]{x03BC}\text{m}$. The results of van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010) have a breakup period of approximately
$856~\unicode[STIX]{x03BC}\text{m}$. The results of van Hoeve et al. (Reference van Hoeve, Gekle, Snoeijer, Versluis, Brenner and Lohse2010) have a breakup period of approximately  $26$ to
$26$ to  $30~\unicode[STIX]{x03BC}\text{s}$ and a breakup length of approximately
$30~\unicode[STIX]{x03BC}\text{s}$ and a breakup length of approximately  $800~\unicode[STIX]{x03BC}\text{m}$. The error in breakup length between the two codes can be explained by the difference in grid size. Overall, figure 19 shows a good agreement between the two sets of results and validates our numerical scheme.
$800~\unicode[STIX]{x03BC}\text{m}$. The error in breakup length between the two codes can be explained by the difference in grid size. Overall, figure 19 shows a good agreement between the two sets of results and validates our numerical scheme.

Figure 21. Comparison of gain and  $\unicode[STIX]{x1D714}_{opt}$ obtained from the resolvent analysis and spatial analysis for two different domain sizes (a)
$\unicode[STIX]{x1D714}_{opt}$ obtained from the resolvent analysis and spatial analysis for two different domain sizes (a)  $L=25$ and (b)
$L=25$ and (b)  $L=50$ for a jet in the absence of gravity and characterised by
$L=50$ for a jet in the absence of gravity and characterised by  $Oh=0.3$ and
$Oh=0.3$ and  $We=1.75$. Irrespective of the domain size and the method employed, the
$We=1.75$. Irrespective of the domain size and the method employed, the  $\unicode[STIX]{x1D714}_{opt}$ value lies in the range
$\unicode[STIX]{x1D714}_{opt}$ value lies in the range  $[0.74,~0.75]$.
$[0.74,~0.75]$.

Figure 22. Resolvent and spatial response ( $|a|$ and
$|a|$ and  $|u|$) of the jet characterised by
$|u|$) of the jet characterised by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $We_{in}=1.75$ and
$We_{in}=1.75$ and  $Bo_{in}=0.1$ at (a,b)
$Bo_{in}=0.1$ at (a,b)  $\unicode[STIX]{x1D714}=1$ and (c,d)
$\unicode[STIX]{x1D714}=1$ and (c,d)  $\unicode[STIX]{x1D714}=1.5$ with a domain size
$\unicode[STIX]{x1D714}=1.5$ with a domain size  $L=50$.
$L=50$.
A.4 Comparison between resolvent and spatial analyses
In this section, we briefly show the preferred forcing frequency of the jet discussed in § 3.3 in the absence of gravity. The jet is characterised by  $Oh_{in}=0.3$,
$Oh_{in}=0.3$,  $We_{in}=1.75$ and
$We_{in}=1.75$ and  $Bo_{in}=0$. As shown in figure 20, nonlinear simulations for the governing equations (3.1) for the zero-gravity case using different forcing amplitudes
$Bo_{in}=0$. As shown in figure 20, nonlinear simulations for the governing equations (3.1) for the zero-gravity case using different forcing amplitudes  $\unicode[STIX]{x1D716}$ show that
$\unicode[STIX]{x1D716}$ show that  $\unicode[STIX]{x1D714}_{opt}$ is independent of the chosen forcing amplitude, a behaviour in contrast to the situation where gravity is present (previously shown in figure 3). Figure 21 shows the comparison of gain, in the absence of gravity, as a function of forcing frequency using spatial and resolvent analysis for two different domain sizes. For convenience, we also plot the resolvent gain
$\unicode[STIX]{x1D714}_{opt}$ is independent of the chosen forcing amplitude, a behaviour in contrast to the situation where gravity is present (previously shown in figure 3). Figure 21 shows the comparison of gain, in the absence of gravity, as a function of forcing frequency using spatial and resolvent analysis for two different domain sizes. For convenience, we also plot the resolvent gain  $G_{h,fu}$ expressed in terms of the forcing applied for the nonlinear simulations. We note that all the curves, irrespective of the domain size, predict the same optimal forcing frequency
$G_{h,fu}$ expressed in terms of the forcing applied for the nonlinear simulations. We note that all the curves, irrespective of the domain size, predict the same optimal forcing frequency  $\unicode[STIX]{x1D714}_{opt}=0.74{-}0.76$, a value close to the nonlinear prediction of figure 20. Moreover, unlike the situation with
$\unicode[STIX]{x1D714}_{opt}=0.74{-}0.76$, a value close to the nonlinear prediction of figure 20. Moreover, unlike the situation with  $Bo=0.1$, we notice that, in the absence of gravity, the magnitude of the gain at all frequencies is well captured by the spatial analysis.
$Bo=0.1$, we notice that, in the absence of gravity, the magnitude of the gain at all frequencies is well captured by the spatial analysis.
A.5 Linear operator for eigenvalue problem
For the eigenvalue problem related to the global stability in § 5.1, the matrix  $\unicode[STIX]{x1D648}$ is expressed as
$\unicode[STIX]{x1D648}$ is expressed as
 $$\begin{eqnarray}\unicode[STIX]{x1D648}=\left[\begin{array}{@{}cc@{}}\unicode[STIX]{x1D614}_{11} & \unicode[STIX]{x1D614}_{12}\\ \unicode[STIX]{x1D614}_{21} & \unicode[STIX]{x1D614}_{22}\end{array}\right],\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D648}=\left[\begin{array}{@{}cc@{}}\unicode[STIX]{x1D614}_{11} & \unicode[STIX]{x1D614}_{12}\\ \unicode[STIX]{x1D614}_{21} & \unicode[STIX]{x1D614}_{22}\end{array}\right],\end{eqnarray}$$ where the expressions  $\unicode[STIX]{x1D614}_{11}$,
$\unicode[STIX]{x1D614}_{11}$,  $\unicode[STIX]{x1D614}_{12}$,
$\unicode[STIX]{x1D614}_{12}$,  $\unicode[STIX]{x1D614}_{21}$ and
$\unicode[STIX]{x1D614}_{21}$ and  $\unicode[STIX]{x1D614}_{22}$ denote the following differential equations:
$\unicode[STIX]{x1D614}_{22}$ denote the following differential equations:
 $$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{11}=-\frac{\unicode[STIX]{x1D64C}}{h_{b}^{2}}\text{D}+\frac{\unicode[STIX]{x1D64C}h_{b}^{\prime }}{h_{b}^{3}}\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{11}=-\frac{\unicode[STIX]{x1D64C}}{h_{b}^{2}}\text{D}+\frac{\unicode[STIX]{x1D64C}h_{b}^{\prime }}{h_{b}^{3}}\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{12}=-\frac{h_{b}}{2}\text{D}-h_{b}^{\prime }\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{12}=-\frac{h_{b}}{2}\text{D}-h_{b}^{\prime }\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{21}=\mathop{\sum }_{k=1}^{4}s^{2k-1}\unicode[STIX]{x1D64F}_{k}-12Oh_{in}\unicode[STIX]{x1D64C}\left(\frac{h_{b}^{\prime 2}}{h_{b}^{2}}+\frac{h_{b}^{\prime \prime }}{h_{b}}\right)\text{D}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{21}=\mathop{\sum }_{k=1}^{4}s^{2k-1}\unicode[STIX]{x1D64F}_{k}-12Oh_{in}\unicode[STIX]{x1D64C}\left(\frac{h_{b}^{\prime 2}}{h_{b}^{2}}+\frac{h_{b}^{\prime \prime }}{h_{b}}\right)\text{D}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{22}=3Oh_{in}\left(\text{D}^{2}+\frac{2h_{b}^{\prime }}{h_{b}\text{D}}\right)-\frac{\unicode[STIX]{x1D64C}}{h_{b}^{2}}\text{D}+\frac{2\unicode[STIX]{x1D64C}h_{b}^{\prime }}{h_{b}^{3}}\unicode[STIX]{x1D644}. & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \unicode[STIX]{x1D614}_{22}=3Oh_{in}\left(\text{D}^{2}+\frac{2h_{b}^{\prime }}{h_{b}\text{D}}\right)-\frac{\unicode[STIX]{x1D64C}}{h_{b}^{2}}\text{D}+\frac{2\unicode[STIX]{x1D64C}h_{b}^{\prime }}{h_{b}^{3}}\unicode[STIX]{x1D644}. & \displaystyle\end{eqnarray}$$ $\unicode[STIX]{x1D644}$ is the identity operator,
$\unicode[STIX]{x1D644}$ is the identity operator,  $\text{D}^{n}\equiv \text{d}^{n}/\text{d}z^{n}$,
$\text{D}^{n}\equiv \text{d}^{n}/\text{d}z^{n}$,  $s(z)=[1+(h_{b}^{\prime })^{2}]^{-1/2}$ and
$s(z)=[1+(h_{b}^{\prime })^{2}]^{-1/2}$ and  $$\begin{eqnarray}\displaystyle & \displaystyle T_{1}=\frac{1}{r_{b}^{2}}\text{D}-\frac{2r_{b}^{\prime }}{r_{b}^{3}}\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle T_{1}=\frac{1}{r_{b}^{2}}\text{D}-\frac{2r_{b}^{\prime }}{r_{b}^{3}}\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle T_{2}=\text{D}^{3}+\frac{h_{b}^{\prime }}{h_{b}}\text{D}^{2}-\left[\frac{(h_{b}^{\prime })^{2}}{h_{b}^{2}}+\frac{h_{b}^{\prime \prime }}{h_{b}}\right]\text{D}-\frac{rh_{b}^{\prime }h_{b}^{\prime \prime }}{h_{b}^{2}}\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle T_{2}=\text{D}^{3}+\frac{h_{b}^{\prime }}{h_{b}}\text{D}^{2}-\left[\frac{(h_{b}^{\prime })^{2}}{h_{b}^{2}}+\frac{h_{b}^{\prime \prime }}{h_{b}}\right]\text{D}-\frac{rh_{b}^{\prime }h_{b}^{\prime \prime }}{h_{b}^{2}}\unicode[STIX]{x1D644}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle T_{3}=-6h_{b}^{\prime }h_{b}^{\prime \prime }\text{D}^{2}-3\left[\frac{(h_{b}^{\prime })^{2}h_{b}^{\prime \prime }}{h_{b}}+(h_{b}^{\prime \prime })^{2}-h_{b}^{\prime }h_{b}^{\prime \prime \prime }\right]\text{D}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle T_{3}=-6h_{b}^{\prime }h_{b}^{\prime \prime }\text{D}^{2}-3\left[\frac{(h_{b}^{\prime })^{2}h_{b}^{\prime \prime }}{h_{b}}+(h_{b}^{\prime \prime })^{2}-h_{b}^{\prime }h_{b}^{\prime \prime \prime }\right]\text{D}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle T_{4}=15(h_{b}^{\prime \prime })^{2}(h_{b}^{\prime })^{2}\text{D}. & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle T_{4}=15(h_{b}^{\prime \prime })^{2}(h_{b}^{\prime })^{2}\text{D}. & \displaystyle\end{eqnarray}$$A.6 WKBJ formulation for axisymmetric 1-D Eggers and Dupont equations
A.6.1 Linearised equations
Considering linear perturbations ( $a^{\prime },u^{\prime }$) in the jet interface and velocity around the base flow (
$a^{\prime },u^{\prime }$) in the jet interface and velocity around the base flow ( $a_{b},u_{b}$), the linearised system of equations is written as
$a_{b},u_{b}$), the linearised system of equations is written as
 $$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}a^{\prime }}{\unicode[STIX]{x2202}t}=(-A_{1}-A_{2}\text{D}_{1})a^{\prime }+(-A_{3}-A_{4}\text{D}_{1})u^{\prime }, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}a^{\prime }}{\unicode[STIX]{x2202}t}=(-A_{1}-A_{2}\text{D}_{1})a^{\prime }+(-A_{3}-A_{4}\text{D}_{1})u^{\prime }, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}u^{\prime }}{\unicode[STIX]{x2202}t}=(-B_{1}-B_{2}\text{D}_{1}-B_{3}\text{D}_{2}-B_{4}\text{D}_{3})a^{\prime }+(-B_{1}-B_{2}\text{D}_{1}-B_{3}\text{D}_{2})u^{\prime }, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle \frac{\unicode[STIX]{x2202}u^{\prime }}{\unicode[STIX]{x2202}t}=(-B_{1}-B_{2}\text{D}_{1}-B_{3}\text{D}_{2}-B_{4}\text{D}_{3})a^{\prime }+(-B_{1}-B_{2}\text{D}_{1}-B_{3}\text{D}_{2})u^{\prime }, & \displaystyle\end{eqnarray}$$ $\text{D}_{i}$ with
$\text{D}_{i}$ with  $i=1,\ldots ,3$ are the differential operators with respect to
$i=1,\ldots ,3$ are the differential operators with respect to  $z$. Equation (A 5) can be reformed as
$z$. Equation (A 5) can be reformed as  $$\begin{eqnarray}[\dot{\boldsymbol{q}}^{\prime }]=\unicode[STIX]{x1D646}[\boldsymbol{q}^{\prime }],\end{eqnarray}$$
$$\begin{eqnarray}[\dot{\boldsymbol{q}}^{\prime }]=\unicode[STIX]{x1D646}[\boldsymbol{q}^{\prime }],\end{eqnarray}$$where
 $$\begin{eqnarray}[\boldsymbol{q}^{\prime }]=\left[\begin{array}{@{}c@{}}a^{\prime }\\ u^{\prime }\end{array}\right],\quad \unicode[STIX]{x1D646}=\left[\begin{array}{@{}cc@{}}-A_{1}-A_{2}\text{D}_{1} & -A_{3}-A_{4}\text{D}_{1}\\ -B_{1}-B_{2}\text{D}_{1}-B_{3}\text{D}_{2}-B_{4}\text{D}_{3} & -B_{5}-B_{6}\text{D}_{1}-B_{7}\text{D}_{2}\\ \end{array}\right],\end{eqnarray}$$
$$\begin{eqnarray}[\boldsymbol{q}^{\prime }]=\left[\begin{array}{@{}c@{}}a^{\prime }\\ u^{\prime }\end{array}\right],\quad \unicode[STIX]{x1D646}=\left[\begin{array}{@{}cc@{}}-A_{1}-A_{2}\text{D}_{1} & -A_{3}-A_{4}\text{D}_{1}\\ -B_{1}-B_{2}\text{D}_{1}-B_{3}\text{D}_{2}-B_{4}\text{D}_{3} & -B_{5}-B_{6}\text{D}_{1}-B_{7}\text{D}_{2}\\ \end{array}\right],\end{eqnarray}$$ where the coefficients  $A_{1,\ldots ,4}$ and
$A_{1,\ldots ,4}$ and  $B_{1,\ldots ,7}$ are given as
$B_{1,\ldots ,7}$ are given as
 $$\begin{eqnarray}\displaystyle & \displaystyle A_{1}={u_{b}}^{\prime }(z), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle A_{1}={u_{b}}^{\prime }(z), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle A_{2}=u_{b}(z), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle A_{2}=u_{b}(z), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle A_{3}={a_{b}}^{\prime }(z), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle A_{3}={a_{b}}^{\prime }(z), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle A_{4}=a_{b}(z), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle A_{4}=a_{b}(z), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle B_{1} & = & \displaystyle \frac{15(-2{a_{b}}^{\prime }(z)^{3}-4a_{b}(z){a_{b}}^{\prime }(z)+{a_{b}}^{\prime }(z)^{3}(-{a_{b}}^{\prime \prime }(z))+a_{b}(z){a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z)^{2})}{16S^{7/2}}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{3(2a_{b}(z){a_{b}}^{(3)}(z)-8{a_{b}}^{\prime }(z)+{a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z)^{2}-2{a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z))}{8S^{5/2}}\nonumber\\ \displaystyle & & \displaystyle +\,\frac{{a_{b}}^{(3)}(z)}{2S^{3/2}}-\frac{3(Oh_{in}{a_{b}}^{\prime }(z){u_{b}}^{\prime }(z))}{a_{b}(z)^{2}},\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle B_{1} & = & \displaystyle \frac{15(-2{a_{b}}^{\prime }(z)^{3}-4a_{b}(z){a_{b}}^{\prime }(z)+{a_{b}}^{\prime }(z)^{3}(-{a_{b}}^{\prime \prime }(z))+a_{b}(z){a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z)^{2})}{16S^{7/2}}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{3(2a_{b}(z){a_{b}}^{(3)}(z)-8{a_{b}}^{\prime }(z)+{a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z)^{2}-2{a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z))}{8S^{5/2}}\nonumber\\ \displaystyle & & \displaystyle +\,\frac{{a_{b}}^{(3)}(z)}{2S^{3/2}}-\frac{3(Oh_{in}{a_{b}}^{\prime }(z){u_{b}}^{\prime }(z))}{a_{b}(z)^{2}},\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle B_{2} & = & \displaystyle \frac{15(-2{a_{b}}^{\prime }(z)^{4}-4a_{b}(z){a_{b}}^{\prime }(z)^{2}+{a_{b}}^{\prime }(z)^{4}(-{a_{b}}^{\prime \prime }(z))+a_{b}(z){a_{b}}^{\prime }(z)^{2}{a_{b}}^{\prime \prime }(z)^{2})}{32S^{7/2}}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{3(a_{b}(z){a_{b}}^{\prime \prime }(z)^{2}-8{a_{b}}^{\prime }(z)^{2}+a_{b}(z){a_{b}}^{(3)}(z){a_{b}}^{\prime }(z)-4{a_{b}}^{\prime }(z)^{2}{a_{b}}^{\prime \prime }(z)-4a_{b}(z))}{8S^{5/2}}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{(a_{b}^{\prime \prime }(z)+2)}{2S^{3/2}}+\frac{3Oh{u_{b}}^{\prime }(z)}{a_{b}(z)},\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle B_{2} & = & \displaystyle \frac{15(-2{a_{b}}^{\prime }(z)^{4}-4a_{b}(z){a_{b}}^{\prime }(z)^{2}+{a_{b}}^{\prime }(z)^{4}(-{a_{b}}^{\prime \prime }(z))+a_{b}(z){a_{b}}^{\prime }(z)^{2}{a_{b}}^{\prime \prime }(z)^{2})}{32S^{7/2}}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{3(a_{b}(z){a_{b}}^{\prime \prime }(z)^{2}-8{a_{b}}^{\prime }(z)^{2}+a_{b}(z){a_{b}}^{(3)}(z){a_{b}}^{\prime }(z)-4{a_{b}}^{\prime }(z)^{2}{a_{b}}^{\prime \prime }(z)-4a_{b}(z))}{8S^{5/2}}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{(a_{b}^{\prime \prime }(z)+2)}{2S^{3/2}}+\frac{3Oh{u_{b}}^{\prime }(z)}{a_{b}(z)},\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle B_{3}=\frac{3({a_{b}}^{\prime }(z)^{3}-2a_{b}(z){a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z))}{8S^{5/2}}--\frac{{a_{b}}^{\prime }(z)}{2S^{3/2}}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle B_{3}=\frac{3({a_{b}}^{\prime }(z)^{3}-2a_{b}(z){a_{b}}^{\prime }(z){a_{b}}^{\prime \prime }(z))}{8S^{5/2}}--\frac{{a_{b}}^{\prime }(z)}{2S^{3/2}}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle B_{4}=\frac{a_{b}(z)}{2S^{3/2}}, & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle B_{4}=\frac{a_{b}(z)}{2S^{3/2}}, & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle B_{5}=-{u_{b}}^{\prime }(z), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle B_{5}=-{u_{b}}^{\prime }(z), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle B_{6}=\frac{3Oh_{in}{a_{b}}^{\prime }(z)}{a_{b}(z)}-u_{b}(z), & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle B_{6}=\frac{3Oh_{in}{a_{b}}^{\prime }(z)}{a_{b}(z)}-u_{b}(z), & \displaystyle\end{eqnarray}$$ $$\begin{eqnarray}\displaystyle & \displaystyle B_{7}=3Oh. & \displaystyle\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle B_{7}=3Oh. & \displaystyle\end{eqnarray}$$ $S$ replaces the term
$S$ replaces the term  $\frac{1}{4}{a_{b}}^{\prime }(z)^{2}+a_{b}(z)$.
$\frac{1}{4}{a_{b}}^{\prime }(z)^{2}+a_{b}(z)$.A.6.2 Linearised equation expressed in terms of slow variable
For the WKBJ analysis, we then introduce the spatial scales. The fast spatial scale  $z$ is replaced by the slow scale
$z$ is replaced by the slow scale  $Z$, such that
$Z$, such that  $Z=\unicode[STIX]{x1D702}z$. The base flow is now expressed as a function of
$Z=\unicode[STIX]{x1D702}z$. The base flow is now expressed as a function of  $Z$ such that
$Z$ such that  $a_{b}(Z)$ and
$a_{b}(Z)$ and  $u_{b}(Z)$. Let us consider the following normal-mode expansion for the perturbation:
$u_{b}(Z)$. Let us consider the following normal-mode expansion for the perturbation:
 $$\begin{eqnarray}\boldsymbol{q}^{\prime }(Z,t)=\hat{\boldsymbol{q}}(Z)\exp \!\left[\text{i}\left(\frac{1}{\unicode[STIX]{x1D702}}\int _{0}^{Z}k(Z^{\prime },\unicode[STIX]{x1D714})\,\text{d}Z^{\prime }-\unicode[STIX]{x1D714}t\right)\right].\end{eqnarray}$$
$$\begin{eqnarray}\boldsymbol{q}^{\prime }(Z,t)=\hat{\boldsymbol{q}}(Z)\exp \!\left[\text{i}\left(\frac{1}{\unicode[STIX]{x1D702}}\int _{0}^{Z}k(Z^{\prime },\unicode[STIX]{x1D714})\,\text{d}Z^{\prime }-\unicode[STIX]{x1D714}t\right)\right].\end{eqnarray}$$Injecting the transformations (A 11a–d) into (A 5), the linearised equations on a weakly non-parallel base flow are expressed through (A 12)–(A 13):
 $$\begin{eqnarray}\left.\begin{array}{@{}c@{}}\displaystyle \frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}t}\rightarrow -\text{i}\unicode[STIX]{x1D714},\\ \displaystyle \frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}\rightarrow \text{i}k+\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z},\\ \displaystyle \frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}z^{2}}\rightarrow -k^{2}+\text{i}\unicode[STIX]{x1D702}\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+\unicode[STIX]{x1D702}^{2}\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}},\\ \displaystyle \begin{array}{@{}rcl@{}}\displaystyle \frac{\unicode[STIX]{x2202}^{3}}{\unicode[STIX]{x2202}z^{3}}\; & \rightarrow \; & \displaystyle -\text{i}k^{3}-3\unicode[STIX]{x1D702}k\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)\\ \; & \; & +\,\displaystyle \unicode[STIX]{x1D702}^{2}\left(3\text{i}\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}+3\text{i}k\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}}+\text{i}\frac{\unicode[STIX]{x2202}^{2}k}{\unicode[STIX]{x2202}Z^{2}}\right)+\unicode[STIX]{x1D702}^{3}\frac{\unicode[STIX]{x2202}^{3}}{\unicode[STIX]{x2202}Z^{3}},\end{array}\end{array}\!\!\right\}\end{eqnarray}$$
$$\begin{eqnarray}\left.\begin{array}{@{}c@{}}\displaystyle \frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}t}\rightarrow -\text{i}\unicode[STIX]{x1D714},\\ \displaystyle \frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}z}\rightarrow \text{i}k+\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z},\\ \displaystyle \frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}z^{2}}\rightarrow -k^{2}+\text{i}\unicode[STIX]{x1D702}\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+\unicode[STIX]{x1D702}^{2}\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}},\\ \displaystyle \begin{array}{@{}rcl@{}}\displaystyle \frac{\unicode[STIX]{x2202}^{3}}{\unicode[STIX]{x2202}z^{3}}\; & \rightarrow \; & \displaystyle -\text{i}k^{3}-3\unicode[STIX]{x1D702}k\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)\\ \; & \; & +\,\displaystyle \unicode[STIX]{x1D702}^{2}\left(3\text{i}\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}+3\text{i}k\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}}+\text{i}\frac{\unicode[STIX]{x2202}^{2}k}{\unicode[STIX]{x2202}Z^{2}}\right)+\unicode[STIX]{x1D702}^{3}\frac{\unicode[STIX]{x2202}^{3}}{\unicode[STIX]{x2202}Z^{3}},\end{array}\end{array}\!\!\right\}\end{eqnarray}$$where the continuity equation converts to
 $$\begin{eqnarray}(-\text{i}\unicode[STIX]{x1D714}+\text{i}ku_{b})\hat{a}+(\text{i}ka_{b})\hat{u} =-\unicode[STIX]{x1D702}\left[\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}(a_{b}\hat{u} +u_{b}\hat{a})\right],\end{eqnarray}$$
$$\begin{eqnarray}(-\text{i}\unicode[STIX]{x1D714}+\text{i}ku_{b})\hat{a}+(\text{i}ka_{b})\hat{u} =-\unicode[STIX]{x1D702}\left[\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}(a_{b}\hat{u} +u_{b}\hat{a})\right],\end{eqnarray}$$and the momentum equation transforms as
 $$\begin{eqnarray}\displaystyle \text{i}\unicode[STIX]{x1D714}\hat{u} & = & \displaystyle -\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}\hat{u} -\left(u_{b}-\unicode[STIX]{x1D702}\frac{3Oh}{a_{b}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}\right)\left(\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}+\text{i}k\right)\hat{u} \nonumber\\ \displaystyle & & \displaystyle +\,3Oh\left(-k^{2}+\unicode[STIX]{x1D702}\text{i}\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+\unicode[STIX]{x1D702}^{2}\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}}\right)\hat{u} -\left(\unicode[STIX]{x1D702}\frac{3}{4a_{b}^{5/2}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}\right)\hat{a}\nonumber\\ \displaystyle & & \displaystyle +\,\left(\frac{1}{2a_{b}^{3/2}}+\frac{3\unicode[STIX]{x1D702}Oh}{a_{b}}\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}\right)\left(\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}+\text{i}k\right)\hat{a}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{\unicode[STIX]{x1D702}}{2a_{b}^{3/2}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}\left(-k^{2}+\unicode[STIX]{x1D702}\text{i}\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+\unicode[STIX]{x1D702}^{2}\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}}\right)\hat{a}\nonumber\\ \displaystyle & & \displaystyle +\,\frac{1}{2a_{b}^{1/2}}\left(-\text{i}k^{3}-3\unicode[STIX]{x1D702}k\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+O(\unicode[STIX]{x1D702}^{2})\right)\hat{a}.\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle \text{i}\unicode[STIX]{x1D714}\hat{u} & = & \displaystyle -\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}\hat{u} -\left(u_{b}-\unicode[STIX]{x1D702}\frac{3Oh}{a_{b}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}\right)\left(\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}+\text{i}k\right)\hat{u} \nonumber\\ \displaystyle & & \displaystyle +\,3Oh\left(-k^{2}+\unicode[STIX]{x1D702}\text{i}\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+\unicode[STIX]{x1D702}^{2}\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}}\right)\hat{u} -\left(\unicode[STIX]{x1D702}\frac{3}{4a_{b}^{5/2}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}\right)\hat{a}\nonumber\\ \displaystyle & & \displaystyle +\,\left(\frac{1}{2a_{b}^{3/2}}+\frac{3\unicode[STIX]{x1D702}Oh}{a_{b}}\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}\right)\left(\unicode[STIX]{x1D702}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}+\text{i}k\right)\hat{a}\nonumber\\ \displaystyle & & \displaystyle -\,\frac{\unicode[STIX]{x1D702}}{2a_{b}^{3/2}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}\left(-k^{2}+\unicode[STIX]{x1D702}\text{i}\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+\unicode[STIX]{x1D702}^{2}\frac{\unicode[STIX]{x2202}^{2}}{\unicode[STIX]{x2202}Z^{2}}\right)\hat{a}\nonumber\\ \displaystyle & & \displaystyle +\,\frac{1}{2a_{b}^{1/2}}\left(-\text{i}k^{3}-3\unicode[STIX]{x1D702}k\left(\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)+O(\unicode[STIX]{x1D702}^{2})\right)\hat{a}.\end{eqnarray}$$ Defining  $\hat{\boldsymbol{q}}^{(1)}=[\hat{a}^{(1)}~\hat{u} ^{(1)}]$ and
$\hat{\boldsymbol{q}}^{(1)}=[\hat{a}^{(1)}~\hat{u} ^{(1)}]$ and  $\hat{\boldsymbol{q}}^{(2)}=[\hat{a}^{(2)}~\hat{u} ^{(2)}]$, we now consider the asymptotic expansion
$\hat{\boldsymbol{q}}^{(2)}=[\hat{a}^{(2)}~\hat{u} ^{(2)}]$, we now consider the asymptotic expansion
 $$\begin{eqnarray}\hat{\boldsymbol{q}}\sim A(Z)\hat{\boldsymbol{q}}^{(1)}(Z)+\unicode[STIX]{x1D702}\hat{\boldsymbol{q}}^{(2)}(Z)+\cdots \,,\end{eqnarray}$$
$$\begin{eqnarray}\hat{\boldsymbol{q}}\sim A(Z)\hat{\boldsymbol{q}}^{(1)}(Z)+\unicode[STIX]{x1D702}\hat{\boldsymbol{q}}^{(2)}(Z)+\cdots \,,\end{eqnarray}$$ and inject it into the governing equations (A 12)–(A 13) to obtain the local stability problem at orders  $\unicode[STIX]{x1D702}^{0}$ and
$\unicode[STIX]{x1D702}^{0}$ and  $\unicode[STIX]{x1D702}^{1}$.
$\unicode[STIX]{x1D702}^{1}$.
Order  $\unicode[STIX]{x1D702}^{0}$. At zeroth order in
$\unicode[STIX]{x1D702}^{0}$. At zeroth order in  $\unicode[STIX]{x1D702}$, the local stability problem is retrieved:
$\unicode[STIX]{x1D702}$, the local stability problem is retrieved:


 $\unicode[STIX]{x1D647}$, such that
$\unicode[STIX]{x1D647}$, such that  $$\begin{eqnarray}\unicode[STIX]{x1D647}[\hat{\boldsymbol{q}}^{(1)}]=0,\quad \text{where the linear operator }\unicode[STIX]{x1D647}=\left[\begin{array}{@{}cc@{}}\unicode[STIX]{x1D613}_{11} & \unicode[STIX]{x1D613}_{12}\\ \unicode[STIX]{x1D613}_{21} & \unicode[STIX]{x1D613}_{22}\end{array}\right].\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D647}[\hat{\boldsymbol{q}}^{(1)}]=0,\quad \text{where the linear operator }\unicode[STIX]{x1D647}=\left[\begin{array}{@{}cc@{}}\unicode[STIX]{x1D613}_{11} & \unicode[STIX]{x1D613}_{12}\\ \unicode[STIX]{x1D613}_{21} & \unicode[STIX]{x1D613}_{22}\end{array}\right].\end{eqnarray}$$ Substituting the expression for  $\hat{u} ^{(1)}$ from (A 15a) into (A 15b), we finally obtain
$\hat{u} ^{(1)}$ from (A 15a) into (A 15b), we finally obtain
 $$\begin{eqnarray}\left(-\unicode[STIX]{x1D714}^{2}+2u_{b}\unicode[STIX]{x1D714}k+\left(-\frac{1}{2\sqrt{a_{b}}}-u_{b}^{2}-3\text{i}Oh\unicode[STIX]{x1D714}\right)k^{2}+3\text{i}Ohu_{b}k^{3}+\frac{\sqrt{a_{b}}}{2}k^{4}\right)\hat{a}^{(1)}=0,\end{eqnarray}$$
$$\begin{eqnarray}\left(-\unicode[STIX]{x1D714}^{2}+2u_{b}\unicode[STIX]{x1D714}k+\left(-\frac{1}{2\sqrt{a_{b}}}-u_{b}^{2}-3\text{i}Oh\unicode[STIX]{x1D714}\right)k^{2}+3\text{i}Ohu_{b}k^{3}+\frac{\sqrt{a_{b}}}{2}k^{4}\right)\hat{a}^{(1)}=0,\end{eqnarray}$$ the solution of which gives the four roots of  $k$ for a given
$k$ for a given  $\unicode[STIX]{x1D714}$. The relevant
$\unicode[STIX]{x1D714}$. The relevant  $k$ branch is tracked as discussed in § 4. For a given
$k$ branch is tracked as discussed in § 4. For a given  $\unicode[STIX]{x1D714}$ and a predetermined
$\unicode[STIX]{x1D714}$ and a predetermined  $k$, the solution of the linear problem (A 16) gives the response
$k$, the solution of the linear problem (A 16) gives the response  $\hat{\boldsymbol{q}}^{(1)}$, a parameter needed to solve the local stability problem at order
$\hat{\boldsymbol{q}}^{(1)}$, a parameter needed to solve the local stability problem at order  $\unicode[STIX]{x1D702}^{1}$.
$\unicode[STIX]{x1D702}^{1}$.
Order  $\unicode[STIX]{x1D702}^{1}$. At first order we obtain
$\unicode[STIX]{x1D702}^{1}$. At first order we obtain
 $$\begin{eqnarray}\unicode[STIX]{x1D647}[\hat{\boldsymbol{q}}^{(2)}]=\unicode[STIX]{x1D64C}[A\hat{\boldsymbol{q}}^{(1)}],\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D647}[\hat{\boldsymbol{q}}^{(2)}]=\unicode[STIX]{x1D64C}[A\hat{\boldsymbol{q}}^{(1)}],\end{eqnarray}$$ where the operator  $\unicode[STIX]{x1D64C}$ can be split into two parts:
$\unicode[STIX]{x1D64C}$ can be split into two parts:
 $$\begin{eqnarray}\unicode[STIX]{x1D64C}[A\hat{\boldsymbol{q}}^{(1)}]=\unicode[STIX]{x1D64D}[\hat{\boldsymbol{q}}^{(1)}]\frac{\text{d}A}{\text{d}Z}+\unicode[STIX]{x1D64E}[\hat{\boldsymbol{q}}^{(1)}]A.\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D64C}[A\hat{\boldsymbol{q}}^{(1)}]=\unicode[STIX]{x1D64D}[\hat{\boldsymbol{q}}^{(1)}]\frac{\text{d}A}{\text{d}Z}+\unicode[STIX]{x1D64E}[\hat{\boldsymbol{q}}^{(1)}]A.\end{eqnarray}$$ Here the operator  $\unicode[STIX]{x1D64D}$ is expressed as
$\unicode[STIX]{x1D64D}$ is expressed as
 $$\begin{eqnarray}\unicode[STIX]{x1D64D}=\left[\begin{array}{@{}cc@{}}-u_{b} & -a_{b}\\ \displaystyle \left(\frac{1-3k^{2}a_{b}}{2a_{b}^{3/2}}\right) & (6\text{i}Ohk-u_{b})\end{array}\right],\end{eqnarray}$$
$$\begin{eqnarray}\unicode[STIX]{x1D64D}=\left[\begin{array}{@{}cc@{}}-u_{b} & -a_{b}\\ \displaystyle \left(\frac{1-3k^{2}a_{b}}{2a_{b}^{3/2}}\right) & (6\text{i}Ohk-u_{b})\end{array}\right],\end{eqnarray}$$ and  $\unicode[STIX]{x1D64E}$ is defined as
$\unicode[STIX]{x1D64E}$ is defined as

where the individual parameters are expressed as
 $$\begin{eqnarray}\displaystyle & \displaystyle s_{11}=-\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}-u_{b}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}, & \displaystyle \nonumber\\ \displaystyle & \displaystyle s_{12}=-\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}-a_{b}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}, & \displaystyle \nonumber\\ \displaystyle & \displaystyle s_{21}=\frac{3\text{i}Ohk}{a_{b}}\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}-\frac{1}{4a_{b}^{5/2}}\left((3-2k^{2}a_{b})\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}+6ka_{b}^{2}\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2a_{b}(-1+3k^{2}a_{b})\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right), & \displaystyle \nonumber\\ \displaystyle & \displaystyle s_{22}=3\text{i}Oh\left(\frac{k}{a_{b}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}+\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)-u_{b}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}-\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}. & \displaystyle \nonumber\end{eqnarray}$$
$$\begin{eqnarray}\displaystyle & \displaystyle s_{11}=-\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}-u_{b}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}, & \displaystyle \nonumber\\ \displaystyle & \displaystyle s_{12}=-\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}-a_{b}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}, & \displaystyle \nonumber\\ \displaystyle & \displaystyle s_{21}=\frac{3\text{i}Ohk}{a_{b}}\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}-\frac{1}{4a_{b}^{5/2}}\left((3-2k^{2}a_{b})\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}+6ka_{b}^{2}\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2a_{b}(-1+3k^{2}a_{b})\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right), & \displaystyle \nonumber\\ \displaystyle & \displaystyle s_{22}=3\text{i}Oh\left(\frac{k}{a_{b}}\frac{\unicode[STIX]{x2202}a_{b}}{\unicode[STIX]{x2202}Z}+\frac{\unicode[STIX]{x2202}k}{\unicode[STIX]{x2202}Z}+2k\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}\right)-u_{b}\frac{\unicode[STIX]{x2202}}{\unicode[STIX]{x2202}Z}-\frac{\unicode[STIX]{x2202}u_{b}}{\unicode[STIX]{x2202}Z}. & \displaystyle \nonumber\end{eqnarray}$$ As explained in Huerre & Rossi (Reference Huerre and Rossi1998) and Viola et al. (Reference Viola, Arratia and Gallaire2016), in order to have solutions of the inhomogeneous equation  $\unicode[STIX]{x1D647}[\hat{\boldsymbol{q}}^{(2)}]=\unicode[STIX]{x1D64C}[A\hat{\boldsymbol{q}}^{(1)}]$, the forcing term
$\unicode[STIX]{x1D647}[\hat{\boldsymbol{q}}^{(2)}]=\unicode[STIX]{x1D64C}[A\hat{\boldsymbol{q}}^{(1)}]$, the forcing term  $\unicode[STIX]{x1D64C}$ should be in the image of the operator
$\unicode[STIX]{x1D64C}$ should be in the image of the operator  $\unicode[STIX]{x1D647}$. This implies that
$\unicode[STIX]{x1D647}$. This implies that  $\unicode[STIX]{x1D64C}$ should be orthogonal to the corresponding adjoint eigenfunction
$\unicode[STIX]{x1D64C}$ should be orthogonal to the corresponding adjoint eigenfunction  $\tilde{\boldsymbol{q}}^{(1)}$ of the adjoint operator
$\tilde{\boldsymbol{q}}^{(1)}$ of the adjoint operator  $\tilde{\unicode[STIX]{x1D647}}$, with respect to the defined inner product,
$\tilde{\unicode[STIX]{x1D647}}$, with respect to the defined inner product,

This leads to the amplitude equation
 $$\begin{eqnarray}M(Z)\frac{\text{d}A}{\text{d}Z}+N(Z)A=0,\end{eqnarray}$$
$$\begin{eqnarray}M(Z)\frac{\text{d}A}{\text{d}Z}+N(Z)A=0,\end{eqnarray}$$ solving which we obtain the amplitude solution  $A(Z)$, which should then be expressed in terms of the fast length scale
$A(Z)$, which should then be expressed in terms of the fast length scale  $z$. Finally, at first order, the response if given by
$z$. Finally, at first order, the response if given by
 $$\begin{eqnarray}\boldsymbol{q}^{\prime }(z)\sim A(\unicode[STIX]{x1D702}z)\hat{\boldsymbol{q}}^{(1)}(z)\exp \left(\int _{0}^{z}-k_{i}(z)^{\prime }\,\text{d}z^{\prime }\right)\exp \left[\text{i}\left(\int _{0}^{z}k_{r}(z^{\prime })\,\text{d}z^{\prime }-\unicode[STIX]{x1D714}t\right)\right].\end{eqnarray}$$
$$\begin{eqnarray}\boldsymbol{q}^{\prime }(z)\sim A(\unicode[STIX]{x1D702}z)\hat{\boldsymbol{q}}^{(1)}(z)\exp \left(\int _{0}^{z}-k_{i}(z)^{\prime }\,\text{d}z^{\prime }\right)\exp \left[\text{i}\left(\int _{0}^{z}k_{r}(z^{\prime })\,\text{d}z^{\prime }-\unicode[STIX]{x1D714}t\right)\right].\end{eqnarray}$$






























































































































































































































