



1. Introduction
The wake of biological locomotion (Dabiri Reference Dabiri2009; Shyy et al. Reference Shyy, Aono, Chimakurthi, Trizila, Kang, Cesnik and Liu2010; Wu Reference Wu2011; Phan & Park Reference Phan and Park2019) and aerial/underwater vehicles (Jiménez, Hultmark & Smits Reference Jiménez, Hultmark and Smits2010; Park et al. Reference Park, Chang, Huang and Sung2014; Bhat et al. Reference Bhat, Zhao, Sheridan, Hourigan and Thompson2020), similar to the footprint, can reveal rich physical information of the moving body. In particular, the shedding vortical structures propagate downstream in the far wake with measurable velocity and vorticity fields, e.g. in the wake of a flying bird (Hubel et al. Reference Hubel, Riskin, Swartz and Breuer2010) or swimming fish (Lauder Reference Lauder2015; Mendelson & Techet Reference Mendelson and Techet2015). These structures can be utilized to infer the forces exerted on the moving body.
The experimental measurement of biological locomotion in the far wake is more feasible than the near-wall measurement of forces owing to the complex boundary condition of the moving body. Thus, the shedding vortical structures in the wake have been extensively investigated in experiments and numerical simulations (e.g. Lauder & Drucker Reference Lauder and Drucker2002; Spedding, Rosén & Hedenström Reference Spedding, Rosén and Hedenström2003; Dong, Mittal & Najjar Reference Dong, Mittal and Najjar2006; King, Kumar & Green Reference King, Kumar and Green2018; Chen et al. Reference Chen, Ryu, Liu and Sung2020; Oh et al. Reference Oh, Lee, Park, Choi and Kim2020). To mimic the wing/fin motion of a flying animal/swimming fish, the flapping plate is a useful model problem to study the vortex dynamics in wake structures (e.g. Li & Lu Reference Li and Lu2012; Buchner, Honnery & Soria Reference Buchner, Honnery and Soria2017; Wang, He & Liu Reference Wang, He and Liu2019).
The ring-like vortical structures have been widely observed in the wake of the flapping plate or foil and used as a simple vortex model to estimate forces on the moving body (see Blondeaux et al. Reference Blondeaux, Fornarelli, Guglielmini, Triantafyllou and Verzicco2005; Buchholz & Smits Reference Buchholz and Smits2006, Reference Buchholz and Smits2008; Li & Dong Reference Li and Dong2016). For a flapping foil with a low aspect ratio, Dong et al. (Reference Dong, Mittal and Najjar2006) numerically investigated the wake topology to understand the hydrodynamic performance of fish fins. They found that the wake is dominated by two sets of ring-like vortical structures during periodical flapping motion, and these structures evolve into vortex rings as they propagate downstream. Dabiri (Reference Dabiri2009) explained the vortex formation process related to the propulsion in biological and bio-inspired systems. For the flapping plate with a large aspect ratio, the wake topology is represented by interconnected vortical structures (Wang, He & Zhang Reference Wang, He and Zhang2015), and the geometry of the vortical structures can be very convoluted in biological locomotion such as birds and bats (Hedenström, Rosén & Spedding Reference Hedenström, Rosén and Spedding2006; Hedenström et al. Reference Hedenström, Johansson, Wolf, von Busse, Winter and Spedding2007).
The wake information can be utilized to estimate forces owing to the momentum transfer from the moving body to the fluid (see Drucker & Lauder Reference Drucker and Lauder1999; Lauder & Drucker Reference Lauder and Drucker2002; Spedding et al. Reference Spedding, Rosén and Hedenström2003; Lee et al. Reference Lee, Park, Jeong, Cho and Kim2013; Park et al. Reference Park, Park, Lee, Cho and Choi2016). If a wake can be represented by distinct closed-loop and discrete vortices, forces were directly estimated through the vortical impulse of a discrete vortex. Lauder & Drucker (Reference Lauder and Drucker2002) simplified wake structures near the moving body as vortex rings and calculated the time-averaged thrust using the vortical impulse during the flapping cycle. The vortical impulse of vortex rings is calculated through the spanwise vorticity on the spanwise symmetry plane (Müeller et al. Reference Müeller, Van den Heuvel, Stamhuis and Videler1997; Gharib, Rambod & Shariff Reference Gharib, Rambod and Shariff1998), and has been used to estimate the thrust from the wake (Li & Lu Reference Li and Lu2012). Dabiri (Reference Dabiri2005) incorporated the vortex-added-mass force into the vortex-ring model to improve the force estimation. On the other hand, if the shape of vortical structure is very different from a ring, the over-simplification of vortex rings can introduce a large discrepancy into the force estimation (Lauder Reference Lauder2015).
Compared with the simple vortex-ring model under phenomenological assumptions, a general theory of aerodynamic forces has been developed to reveal the relationship between the forces on the moving body and local vortex dynamics (see Wu, Ma & Zhou Reference Wu, Ma and Zhou2015). From the structure level, Wu, Liu & Liu (Reference Wu, Liu and Liu2018) summarized the vortex-force theory and impulse theory for calculating forces from local vortical structures with derivative-moment transformations. Moreover, Chang (Reference Chang1992) developed the force-element theory based on potential flows, which was applied to analyse the forces on an impulsively started finite plate (Lee et al. Reference Lee, Hsieh, Chang and Chu2012) and a heaving plate (Lin et al. Reference Lin, Tzeng, Hsieh, Chang and Chu2018).
In the classical vortex-force theory (Prandtl Reference Prandtl1918) in inviscid incompressible flow, the force can be solely determined by the Lamb vector, sometimes referred to as the vortex force. Wu, Lu & Zhuang (Reference Wu, Lu and Zhuang2007) developed the unsteady vortex-force theory to indicate that the force exerted on the moving body is dominated by the vortex force. Wang et al. (Reference Wang, He and Liu2019) proposed the wake-sectional Kutta–Joukowski model to estimate lift based on the vortex-force theory from the wake velocity data on the Trefftz plane for complex wake structures in flapping flight.
In the impulse theory (Wu Reference Wu1981; Lighthill Reference Lighthill1986), the force acting on the body is directly related to the change of the fluid impulse (Burgers Reference Burgers1920), so the impulse theory can be used to estimate forces from wake vortical structures. Birch & Dickinson (Reference Birch and Dickinson2003) investigated the influence of wing–wake interactions on aerodynamic forces in flapping flight based on the time derivative of the vortical impulse. Wang & Wu (Reference Wang and Wu2010) identified the role of vortex rings and their mutual interactions in force production/reduction for a flapping flight using the vorticity moment of wake structures.
The general impulse theory with an arbitrary integral domain was proposed by Noca, Shiels & Jeon (Reference Noca, Shiels and Jeon1997, Reference Noca, Shiels and Jeon1999) to evaluate time-dependent aerodynamic forces on the body. Kang et al. (Reference Kang, Liu, Su and Wu2018) developed the minimum-domain impulse theory to minimize the integral domain to calculate unsteady aerodynamic forces, indicating that the force exerted on the moving body is dominated by vortical structures connecting to the body (Li & Lu Reference Li and Lu2012). The criterion for splitting the minimum domain, however, is very strict, hindering the application of the minimum-domain impulse theory to three-dimensional flows. Furthermore, the impulse was calculated from the vortical structure enclosing the moving body in previous studies, so its practical value is limited compared with the direct calculation of forces from the body boundary. Hence, it is necessary to extend the impulse theory to estimate forces from shedding vortical structures in the far wake for applications.
For structure-based force estimation, the identification and segmentation of vortical structures are crucial for the accuracy and applicability. Eulerian vortex identification methods (e.g. Hunt, Wray & Moin Reference Hunt, Wray and Moin1988; Jeong & Hussain Reference Jeong and Hussain1995) based on the local velocity gradient were usually applied to identify vortical structures, but they cannot ensure the time coherence in the tracking of a particular vortical structure and they have no explicit link to the vorticity-based, vortex-force/impulse theories. Yang & Pullin (Reference Yang and Pullin2010) developed the vortex-surface field (VSF), a Lagrangian-based identification method, and the VSF has been applied to various flows to elucidate the vortex dynamics (e.g. Zhao, Yang & Chen Reference Zhao, Yang and Chen2016; Xiong & Yang Reference Xiong and Yang2019) and develop structure-based force models (Zheng et al. Reference Zheng, Ruan, Yang, He and Chen2019) from a Lagrangian-like view. In particular, Tong, Yang & Wang (Reference Tong, Yang and Wang2020) applied the VSF to the flow past a stationary finite plate to characterize three-dimensional features of vortex surfaces. Additionally, the modal decomposition can extract dominant modes in the flow field (Taira et al. Reference Taira, Brunton, Dawson, Rowley, Colonius, McKeon, Schmidt, Gordeyev, Theofilis and Ukeiley2017), and proper orthogonal decomposition was applied to analyse forces based on the dominant modes for a low-aspect-ratio plate (Li, Dong & Liang Reference Li, Dong and Liang2016).
In the present study, we extend the VSF to flows past a flapping plate to elucidate vortex generation and shedding mechanisms. Then, we simplify the finite-domain impulse theory based on a particular vortex surface, and develop models to infer thrust from shedding vortex surfaces in the far wake. The outline of this paper is as follows. In § 2, we describe the numerical implementation for calculating the velocity field and the VSF for flows past a flapping plate. In § 3, we elucidate the shedding mechanism of vortex surfaces. In § 4, we develop near-wake and far-wake models to estimate the thrust from the shedding vortex surfaces. Some conclusions are drawn in § 5.
2. Simulation overview
2.1. Immersed boundary method
We carry out the direct numerical simulation (DNS) of a three-dimensional uniform flow past a flapping plate with the free-stream velocity  $U$. The zero-thickness plate heaves vertically and pitches around the centre of the plate. The plate has the chord length
$U$. The zero-thickness plate heaves vertically and pitches around the centre of the plate. The plate has the chord length  $c$ and fixed wing span
$c$ and fixed wing span  $b=R_A c$, where
$b=R_A c$, where  $R_A$ is the aspect ratio. Figure 1(a) sketches the flapping plate and the Cartesian coordinate system with the
$R_A$ is the aspect ratio. Figure 1(a) sketches the flapping plate and the Cartesian coordinate system with the  $x$-axis along the streamwise direction, the
$x$-axis along the streamwise direction, the  $y$-axis along the spanwise direction and the
$y$-axis along the spanwise direction and the  $z$-axis along the vertical direction. The kinematics of the flapping plate is characterized by the angle of attack
$z$-axis along the vertical direction. The kinematics of the flapping plate is characterized by the angle of attack
 \begin{equation} \alpha(t)=\alpha_{0}+\alpha_{m} \cos (2 {\rm \pi}f t) ,\end{equation}
\begin{equation} \alpha(t)=\alpha_{0}+\alpha_{m} \cos (2 {\rm \pi}f t) ,\end{equation}and the vertical position of the plate centre
 \begin{equation} z_{c}(t)=z_{c 0}+A \sin (2{\rm \pi} f t), \end{equation}
\begin{equation} z_{c}(t)=z_{c 0}+A \sin (2{\rm \pi} f t), \end{equation}
where  $\alpha _m$ and
$\alpha _m$ and  $A$ respectively denote the pitching and heaving amplitudes,
$A$ respectively denote the pitching and heaving amplitudes,  $\alpha _0$ and
$\alpha _0$ and  $z_{c0}$ respectively denote the time-averaged
$z_{c0}$ respectively denote the time-averaged  $\alpha$ and
$\alpha$ and  $z_c$,
$z_c$,  $f$ is the flapping frequency and
$f$ is the flapping frequency and  $t$ is the physical time. All the variable and parameters in the present study are non-dimensionalized by
$t$ is the physical time. All the variable and parameters in the present study are non-dimensionalized by  $U$ and
$U$ and  $c$.
$c$.

Figure 1. Schematic diagrams of the coordinate system and local-refined mesh. (a) Flow past a flapping plate with the coordinate system  $O$-
$O$- $xyz$. (b) Flow-field domain
$xyz$. (b) Flow-field domain  $\varOmega$ and VSF domain
$\varOmega$ and VSF domain  $\varOmega _{\phi }$ on the
$\varOmega _{\phi }$ on the  $x$–
$x$– $z$ plane at
$z$ plane at  $y=0$. The white line denotes the plate, and the
$y=0$. The white line denotes the plate, and the  $x$-coordinate denotes the streamwise position non-dimensionalized by the chord length.
$x$-coordinate denotes the streamwise position non-dimensionalized by the chord length.
Motivated by the numerical simulations (Dong et al. Reference Dong, Mittal and Najjar2006; Li & Lu Reference Li and Lu2012; Wang et al. Reference Wang, Zhang, He and Liu2013; Li & Dong Reference Li and Dong2016) and experiments (Buchholz & Smits Reference Buchholz and Smits2006, Reference Buchholz and Smits2008) of low-aspect-ratio flapping wings, we conduct a series of DNS cases with the varying parameters listed in table 1. Here,  $Re=Uc/\nu$ is the Reynolds number with the kinematic viscosity
$Re=Uc/\nu$ is the Reynolds number with the kinematic viscosity  $\nu$, and
$\nu$, and  $St = 2Af/U$ is the Strouhal number. Case 1 with
$St = 2Af/U$ is the Strouhal number. Case 1 with  $St=0.6$ is mainly used to study of the VSF evolution and force modelling. This case has a discrete wake dominated by two sets of isolated vortical structures, similar to the wake topology observed in Dong et al. (Reference Dong, Mittal and Najjar2006), Li & Lu (Reference Li and Lu2012), Li & Dong (Reference Li and Dong2016) and Li et al. (Reference Li, Dong and Liang2016). Furthermore, the wake can be more convoluted with the increase of
$St=0.6$ is mainly used to study of the VSF evolution and force modelling. This case has a discrete wake dominated by two sets of isolated vortical structures, similar to the wake topology observed in Dong et al. (Reference Dong, Mittal and Najjar2006), Li & Lu (Reference Li and Lu2012), Li & Dong (Reference Li and Dong2016) and Li et al. (Reference Li, Dong and Liang2016). Furthermore, the wake can be more convoluted with the increase of  $Re$,
$Re$,  $St$ or
$St$ or  $R_A$ (Dong et al. Reference Dong, Mittal and Najjar2006; Wang et al. Reference Wang, Zhang, He and Liu2013; Liu, Dong & Li Reference Liu, Dong and Li2016).
$R_A$ (Dong et al. Reference Dong, Mittal and Najjar2006; Wang et al. Reference Wang, Zhang, He and Liu2013; Liu, Dong & Li Reference Liu, Dong and Li2016).
Table 1. Parameters for the flapping plate in the DNS.

The incompressible flow past a flapping plate is governed by the Navier–Stokes equations
 $$\begin{gather} \frac{\partial \boldsymbol{u}}{\partial t}+\boldsymbol{u} \boldsymbol{\cdot} \boldsymbol{\nabla} \boldsymbol{u}={-}\boldsymbol{\nabla} p+\frac{1}{R e} \nabla^{2} \boldsymbol{u}+\boldsymbol{f}, \end{gather}$$
$$\begin{gather} \frac{\partial \boldsymbol{u}}{\partial t}+\boldsymbol{u} \boldsymbol{\cdot} \boldsymbol{\nabla} \boldsymbol{u}={-}\boldsymbol{\nabla} p+\frac{1}{R e} \nabla^{2} \boldsymbol{u}+\boldsymbol{f}, \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{u}=0, \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{u}=0, \end{gather}$$
where  $\boldsymbol {u}$,
$\boldsymbol {u}$,  $p$ and
$p$ and  $\boldsymbol {f}$ denote the non-dimensional velocity, pressure and body force, respectively. We use the immersed boundary method with the discrete streamfunction (Wang & Zhang Reference Wang and Zhang2011) to solve (2.3) and (2.4). The geometry and kinematics of the plate are described by Lagrangian marker points uniformly distributed on the immersed boundary. The interpolation and spreading of forces on Eulerian and Lagrangian points are linked by the regularized delta function
$\boldsymbol {f}$ denote the non-dimensional velocity, pressure and body force, respectively. We use the immersed boundary method with the discrete streamfunction (Wang & Zhang Reference Wang and Zhang2011) to solve (2.3) and (2.4). The geometry and kinematics of the plate are described by Lagrangian marker points uniformly distributed on the immersed boundary. The interpolation and spreading of forces on Eulerian and Lagrangian points are linked by the regularized delta function  $\delta _h$ (Peskin Reference Peskin2002) as
$\delta _h$ (Peskin Reference Peskin2002) as
 \begin{equation} \sum_{j=1}^{M}\left(\sum_{\boldsymbol{x}} \delta_{h}(\boldsymbol{x}-\boldsymbol{X}_{j}) \delta_{h}(\boldsymbol{x}-\boldsymbol{X}_{k})(\Delta s)^{2}(\Delta x )^{3}\right) \boldsymbol{F}(\boldsymbol{X}_{j}) =\frac{\boldsymbol{U}_b(\boldsymbol{X}_{k})-\boldsymbol{U}^{*}(\boldsymbol{X}_{k})}{\Delta t} , \end{equation}
\begin{equation} \sum_{j=1}^{M}\left(\sum_{\boldsymbol{x}} \delta_{h}(\boldsymbol{x}-\boldsymbol{X}_{j}) \delta_{h}(\boldsymbol{x}-\boldsymbol{X}_{k})(\Delta s)^{2}(\Delta x )^{3}\right) \boldsymbol{F}(\boldsymbol{X}_{j}) =\frac{\boldsymbol{U}_b(\boldsymbol{X}_{k})-\boldsymbol{U}^{*}(\boldsymbol{X}_{k})}{\Delta t} , \end{equation}and
 \begin{equation} \boldsymbol{f}(x)=\sum_{j=1}^{M} \boldsymbol{F}(\boldsymbol{X}_{j}) \delta_{h}(\boldsymbol{x}-\boldsymbol{X}_{j})(\Delta s)^{2}, \end{equation}
\begin{equation} \boldsymbol{f}(x)=\sum_{j=1}^{M} \boldsymbol{F}(\boldsymbol{X}_{j}) \delta_{h}(\boldsymbol{x}-\boldsymbol{X}_{j})(\Delta s)^{2}, \end{equation}
where  $\boldsymbol {x}$ and
$\boldsymbol {x}$ and  $\boldsymbol {X}$ are Eulerian and Lagrangian points, respectively,
$\boldsymbol {X}$ are Eulerian and Lagrangian points, respectively,  $\boldsymbol {f}$ and
$\boldsymbol {f}$ and  $\boldsymbol {F}$ are the forces on Eulerian and Lagrangian points, respectively,
$\boldsymbol {F}$ are the forces on Eulerian and Lagrangian points, respectively,  $\Delta s$ and
$\Delta s$ and  $\Delta x$ are Lagrangian and Eulerian grid spacings, respectively,
$\Delta x$ are Lagrangian and Eulerian grid spacings, respectively,  $\boldsymbol {U}_b$ and
$\boldsymbol {U}_b$ and  $\boldsymbol {U}^*$ are specified and predicted velocities at
$\boldsymbol {U}^*$ are specified and predicted velocities at  $k$th Lagrangian points, respectively, and
$k$th Lagrangian points, respectively, and  $M$ is the total number of Lagrangian points on the immersed boundary. The details and validation of our implementation of the immersed boundary method can be found in Wang & Zhang (Reference Wang and Zhang2011) and Wang et al. (Reference Wang, Zhang, He and Liu2013).
$M$ is the total number of Lagrangian points on the immersed boundary. The details and validation of our implementation of the immersed boundary method can be found in Wang & Zhang (Reference Wang and Zhang2011) and Wang et al. (Reference Wang, Zhang, He and Liu2013).
The thrust coefficient of the flapping plate is
 \begin{equation} C_{T}=\frac{F_T}{\frac{1}{2} \rho U^{2} R_{A}c^2}, \end{equation}
\begin{equation} C_{T}=\frac{F_T}{\frac{1}{2} \rho U^{2} R_{A}c^2}, \end{equation}
where  $F_T$ is the thrust of the flapping plate. From the DNS data, it is calculated by
$F_T$ is the thrust of the flapping plate. From the DNS data, it is calculated by
 \begin{equation} C_{T}={-}\frac{\displaystyle\sum_{k=1}^{M} F_{x}(\boldsymbol{X}_{k})(\Delta s)^{2}}{\frac{1}{2} \rho U^{2} R_{A}c^2}, \end{equation}
\begin{equation} C_{T}={-}\frac{\displaystyle\sum_{k=1}^{M} F_{x}(\boldsymbol{X}_{k})(\Delta s)^{2}}{\frac{1}{2} \rho U^{2} R_{A}c^2}, \end{equation}
where  $F_x$ denotes the
$F_x$ denotes the  $x$-component of the force on Lagrangian points.
$x$-component of the force on Lagrangian points.
As shown in figure 1(b), the present simulation is performed in a rectangular domain of  $\varOmega \in [-14,22]\times [-18,18]\times [-18,18]$. The uniform inflow velocity
$\varOmega \in [-14,22]\times [-18,18]\times [-18,18]$. The uniform inflow velocity  $U$ is prescribed at the inlet and the fixed pressure condition is specified at the outlet. The slip-wall condition is used at the other four boundaries and the no-slip condition is specified on the plate. The initial condition for the flow is
$U$ is prescribed at the inlet and the fixed pressure condition is specified at the outlet. The slip-wall condition is used at the other four boundaries and the no-slip condition is specified on the plate. The initial condition for the flow is  $\boldsymbol {u}=(U,0,0)$. A locally refined mesh with the minimum spacing
$\boldsymbol {u}=(U,0,0)$. A locally refined mesh with the minimum spacing  $\Delta x=0.0125$ is applied around the immersed boundary to achieve the high spatial resolution near the plate, and the maximum spacing
$\Delta x=0.0125$ is applied around the immersed boundary to achieve the high spatial resolution near the plate, and the maximum spacing  $\Delta x=0.4$ is applied in the far field to reduce the computational cost. The total number of grid points is
$\Delta x=0.4$ is applied in the far field to reduce the computational cost. The total number of grid points is  $12$ million. The effectiveness of the present mesh spacing and computational domain has been validated by a convergence test via varying the grid size and computational domain in Appendix A.
$12$ million. The effectiveness of the present mesh spacing and computational domain has been validated by a convergence test via varying the grid size and computational domain in Appendix A.
2.2. VSF method
The VSF is a smooth scalar field satisfying the constraint (see Yang & Pullin Reference Yang and Pullin2010)
 \begin{equation} \boldsymbol{\omega} \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_v=0, \end{equation}
\begin{equation} \boldsymbol{\omega} \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_v=0, \end{equation}
where  $\boldsymbol {\omega }=\boldsymbol {\nabla } \times \boldsymbol {u}$ is the vorticity, so that the isosurface of
$\boldsymbol {\omega }=\boldsymbol {\nabla } \times \boldsymbol {u}$ is the vorticity, so that the isosurface of  $\phi _v$ is a vortex surface consisting of vortex lines. Given a time series of the velocity–vorticity field obtained by solving (2.3) and (2.4), the calculation of the VSF can be implemented as a postprocessing step.
$\phi _v$ is a vortex surface consisting of vortex lines. Given a time series of the velocity–vorticity field obtained by solving (2.3) and (2.4), the calculation of the VSF can be implemented as a postprocessing step.
The two-time method (Yang & Pullin Reference Yang and Pullin2011) with source terms exerted on the immersed boundary (Tong et al. Reference Tong, Yang and Wang2020) is used for calculating the temporal evolution of VSF. For each physical time step, it involves prediction and correction substeps. In the prediction substep, the temporary VSF solution is advanced in the physical time as
 \begin{equation} \frac{\partial \phi_{v}^{*}(\boldsymbol{x}, t)}{\partial t}+\boldsymbol{u}(\boldsymbol{x}, t) \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_{v}^{*}(\boldsymbol{x}, t)=q(\boldsymbol{x}),\quad t \geq 0, \end{equation}
\begin{equation} \frac{\partial \phi_{v}^{*}(\boldsymbol{x}, t)}{\partial t}+\boldsymbol{u}(\boldsymbol{x}, t) \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_{v}^{*}(\boldsymbol{x}, t)=q(\boldsymbol{x}),\quad t \geq 0, \end{equation}
where  $\phi _{v}^{*}$ is a temporary VSF solution which can be deviated from the accurate VSF. In the correction substep,
$\phi _{v}^{*}$ is a temporary VSF solution which can be deviated from the accurate VSF. In the correction substep,  $\phi _{v}^{*}$ is transported along the frozen vorticity as
$\phi _{v}^{*}$ is transported along the frozen vorticity as
 \begin{equation} \frac{\partial \phi_{v}(\boldsymbol{x}, t ; \tau)}{\partial \tau}+\boldsymbol{\omega}(\boldsymbol{x}, t) \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_{v}(\boldsymbol{x}, t ; \tau)=q_{\tau}(\boldsymbol{x}), \quad 0 \leq \tau \leq T_{\tau}, \end{equation}
\begin{equation} \frac{\partial \phi_{v}(\boldsymbol{x}, t ; \tau)}{\partial \tau}+\boldsymbol{\omega}(\boldsymbol{x}, t) \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_{v}(\boldsymbol{x}, t ; \tau)=q_{\tau}(\boldsymbol{x}), \quad 0 \leq \tau \leq T_{\tau}, \end{equation}with
 \begin{equation} \phi_{v}(\boldsymbol{x}, t; \tau=0)=\phi_{v}^{*}(\boldsymbol{x}, t). \end{equation}
\begin{equation} \phi_{v}(\boldsymbol{x}, t; \tau=0)=\phi_{v}^{*}(\boldsymbol{x}, t). \end{equation}
In (2.10) and (2.11), the external VSF source terms  $q(\boldsymbol {x})$ and
$q(\boldsymbol {x})$ and  $q_{\tau }(\boldsymbol {x})$ defined on Eulerian grid points are used to satisfy
$q_{\tau }(\boldsymbol {x})$ defined on Eulerian grid points are used to satisfy  $\phi _v=\phi _v^{B}$ at the immersed boundary, with constant
$\phi _v=\phi _v^{B}$ at the immersed boundary, with constant  $\phi _v^B=1$ on the plate. Finally,
$\phi _v^B=1$ on the plate. Finally,  $\phi _v$ is updated by
$\phi _v$ is updated by  $\phi _{v}(\boldsymbol {x}, t ; \tau =T_{\tau })$ after the pseudo-time evolution, where
$\phi _{v}(\boldsymbol {x}, t ; \tau =T_{\tau })$ after the pseudo-time evolution, where  $T_{\tau }$ is the maximum pseudo-time to ensure the convergence of
$T_{\tau }$ is the maximum pseudo-time to ensure the convergence of  $\phi _v$ in (2.11), and it is typically less than 100 times of
$\phi _v$ in (2.11), and it is typically less than 100 times of  $\Delta t$ in (2.10).
$\Delta t$ in (2.10).
As shown in figure 1(b), the VSF calculation is implemented in a subdomain  $\varOmega _{\phi } \in [-1.0, 7.5] \times [-1.5, 1,5] \times [-3.5, 3.5]$ around the plate and near wake with strong vorticity. In
$\varOmega _{\phi } \in [-1.0, 7.5] \times [-1.5, 1,5] \times [-3.5, 3.5]$ around the plate and near wake with strong vorticity. In  $\varOmega _{\phi }$, the high-resolution uniform mesh with
$\varOmega _{\phi }$, the high-resolution uniform mesh with  $\Delta x=0.02$ is set to ensure the smoothness of numerical VSF solutions. The velocity and vorticity fields in
$\Delta x=0.02$ is set to ensure the smoothness of numerical VSF solutions. The velocity and vorticity fields in  $\varOmega _{\phi }$ are interpolated from
$\varOmega _{\phi }$ are interpolated from  $\varOmega$ through the quadratic Shepard method (Franke Reference Franke1982).
$\varOmega$ through the quadratic Shepard method (Franke Reference Franke1982).
To solve (2.10) and (2.11), the marching of  $t$ and
$t$ and  $\tau$ is approximated by the second-order total-variation-diminishing Runge–Kutta method, and the convection term is calculated by the fifth-order weighted essentially non-oscillatory (WENO) scheme. The numerical diffusion in the WENO scheme serves as the numerical dissipation regularization for smoothing VSFs.
$\tau$ is approximated by the second-order total-variation-diminishing Runge–Kutta method, and the convection term is calculated by the fifth-order weighted essentially non-oscillatory (WENO) scheme. The numerical diffusion in the WENO scheme serves as the numerical dissipation regularization for smoothing VSFs.
An initial VSF  $\phi _{v0}$ needs to be specified to solve (2.10). The initial set-up implies that
$\phi _{v0}$ needs to be specified to solve (2.10). The initial set-up implies that  $\boldsymbol {\omega }=0$ at
$\boldsymbol {\omega }=0$ at  $t=0$, and
$t=0$, and  $\boldsymbol {\omega }$ is generated at
$\boldsymbol {\omega }$ is generated at  $t>0$. Since the vorticity is dominated on the spanwise direction and
$t>0$. Since the vorticity is dominated on the spanwise direction and  $|\boldsymbol {\omega }|$ is close to an exact VSF at very early times (see Tong et al. Reference Tong, Yang and Wang2020), we use
$|\boldsymbol {\omega }|$ is close to an exact VSF at very early times (see Tong et al. Reference Tong, Yang and Wang2020), we use  $|\boldsymbol {\omega }|$ at
$|\boldsymbol {\omega }|$ at  $t=t_0=0.02$ to set
$t=t_0=0.02$ to set
 \begin{equation} \phi_{v 0}(\boldsymbol{x}, t_{0} ; \tau=0)=\sqrt{\frac{|\boldsymbol{\omega}(\boldsymbol{x})|}{|\boldsymbol{\omega}(\boldsymbol{x})|_{max}}}, \end{equation}
\begin{equation} \phi_{v 0}(\boldsymbol{x}, t_{0} ; \tau=0)=\sqrt{\frac{|\boldsymbol{\omega}(\boldsymbol{x})|}{|\boldsymbol{\omega}(\boldsymbol{x})|_{max}}}, \end{equation}and then the initial VSF
 \begin{equation} \phi_{v 0}=\phi_{v 0}(\boldsymbol{x}, t_{0} ; \tau=T_{\tau}) \end{equation}
\begin{equation} \phi_{v 0}=\phi_{v 0}(\boldsymbol{x}, t_{0} ; \tau=T_{\tau}) \end{equation}
at  $t=t_0$ is obtained by solving (2.11), where
$t=t_0$ is obtained by solving (2.11), where  $|\boldsymbol {\omega }(\boldsymbol {x})|_{max}$ denotes the maximum of
$|\boldsymbol {\omega }(\boldsymbol {x})|_{max}$ denotes the maximum of  $|\boldsymbol {\omega }(\boldsymbol {x})|$ in
$|\boldsymbol {\omega }(\boldsymbol {x})|$ in  $\varOmega _\phi$.
$\varOmega _\phi$.
We remark that the numerical dissipation in the VSF convection can cause the artificial decay of the numerical VSF solution, so we compensate the numerical VSF before each physical time step in the two-time method based on the volume-averaged VSF  $\langle \phi _{v0}\rangle$ and local
$\langle \phi _{v0}\rangle$ and local  $|\boldsymbol {\omega }|$. Since
$|\boldsymbol {\omega }|$. Since  $\phi _v$ decays along with
$\phi _v$ decays along with  $x$, we empirically augment the VSF solution downstream as
$x$, we empirically augment the VSF solution downstream as
 \begin{equation} \phi_v(\boldsymbol{x},t) = \tilde{\phi}_v(\boldsymbol{x},t) \gamma^{{(\alpha_l|\boldsymbol{\omega}(\boldsymbol{x})|)}/{|\boldsymbol{\omega}(\boldsymbol{x})|_{max}}}, \end{equation}
\begin{equation} \phi_v(\boldsymbol{x},t) = \tilde{\phi}_v(\boldsymbol{x},t) \gamma^{{(\alpha_l|\boldsymbol{\omega}(\boldsymbol{x})|)}/{|\boldsymbol{\omega}(\boldsymbol{x})|_{max}}}, \end{equation}
where  $\tilde {\phi }_v$ denotes an intermediate VSF solution before the augmentation,
$\tilde {\phi }_v$ denotes an intermediate VSF solution before the augmentation,  $\gamma =\langle \phi _{v0}\rangle /\langle \tilde {\phi }_{v}(\boldsymbol {x},t)\rangle > 1$ is an augmentation factor and
$\gamma =\langle \phi _{v0}\rangle /\langle \tilde {\phi }_{v}(\boldsymbol {x},t)\rangle > 1$ is an augmentation factor and  $\alpha _l = l_x/(l_x+x^3)$ is an empirical parameter with the streamwise length
$\alpha _l = l_x/(l_x+x^3)$ is an empirical parameter with the streamwise length  $l_x$ of
$l_x$ of  $\varOmega _{\phi }$. From numerical experiments, we find that this augmentation can effectively reduce the VSF dissipation or the volume shrinking of a particular VSF isosurface in the present simulation.
$\varOmega _{\phi }$. From numerical experiments, we find that this augmentation can effectively reduce the VSF dissipation or the volume shrinking of a particular VSF isosurface in the present simulation.
Starting from the constructed  $\phi _{v0}$, the numerical VSF solution is calculated by solving (2.10) and (2.11) with (2.15). The deviation of the numerical VSF from the exact VSF is monitored by the cosine of angle between the vorticity and VSF gradient as
$\phi _{v0}$, the numerical VSF solution is calculated by solving (2.10) and (2.11) with (2.15). The deviation of the numerical VSF from the exact VSF is monitored by the cosine of angle between the vorticity and VSF gradient as
 \begin{equation} \lambda_{\boldsymbol{\omega}} \equiv \frac{\boldsymbol{\omega} \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_{v}}{|\boldsymbol{\omega}||\boldsymbol{\nabla} \phi_{v}|}. \end{equation}
\begin{equation} \lambda_{\boldsymbol{\omega}} \equiv \frac{\boldsymbol{\omega} \boldsymbol{\cdot} \boldsymbol{\nabla} \phi_{v}}{|\boldsymbol{\omega}||\boldsymbol{\nabla} \phi_{v}|}. \end{equation}
We find that the volumed-averaged VSF deviation  $\langle |\lambda _{\boldsymbol {\omega }}| \rangle$ over
$\langle |\lambda _{\boldsymbol {\omega }}| \rangle$ over  $\varOmega _\phi$ is controlled to within approximately
$\varOmega _\phi$ is controlled to within approximately  $4\,\%$, indicating that the VSF solution is sufficiently accurate for the further characterization of vortex surfaces and modelling of forces.
$4\,\%$, indicating that the VSF solution is sufficiently accurate for the further characterization of vortex surfaces and modelling of forces.
3. Shedding of vortex surfaces
The discussion in this section is based on the typical Case 1, in which wake structures are dominated by a series of vortex pairs, and each pair contains two discrete vortex surfaces formed in a flapping period  $T=1/f$. We elucidate the shedding mechanism of vortex surfaces from the flapping plate using a particular VSF isosurface of
$T=1/f$. We elucidate the shedding mechanism of vortex surfaces from the flapping plate using a particular VSF isosurface of  $\phi _v=0.3$. This isocontour-level selection considers the balance between the largest volume enclosed by VSF isosurfaces and the effective segmentation of discrete VSF isosurfaces in the wake.
$\phi _v=0.3$. This isocontour-level selection considers the balance between the largest volume enclosed by VSF isosurfaces and the effective segmentation of discrete VSF isosurfaces in the wake.
From the morphology of vortex surfaces and lines, we divide the VSF evolution into three stages: (i) formation of the ring-like vortex surfaces during the first quarter of the flapping cycle; (ii) generation of spoon-like vortex surfaces during a half-cycle; (iii) periodic generation and shedding of spoon-like vortex surfaces.
3.1. Formation of ring-like vortex surfaces
At the initial time, the plate is located at  $z_c=0$ with the maximum angle of attack
$z_c=0$ with the maximum angle of attack  $\alpha =30^{\circ }$. The plate heaves upwards to the highest point at
$\alpha =30^{\circ }$. The plate heaves upwards to the highest point at  $t=T/4$ by (2.2). In the meantime, the positive
$t=T/4$ by (2.2). In the meantime, the positive  $\alpha$ decreases to
$\alpha$ decreases to  $0\,^{\circ }$ during this quarter cycle by (2.1). As shown in figure 2(a), the bulge-like vortex surface
$0\,^{\circ }$ during this quarter cycle by (2.1). As shown in figure 2(a), the bulge-like vortex surface  $V_1$ with counterclockwise vortex lines from the top view is generated around the tip and the trailing edge of the plate. The VSF isosurface is color-coded by
$V_1$ with counterclockwise vortex lines from the top view is generated around the tip and the trailing edge of the plate. The VSF isosurface is color-coded by  $|\boldsymbol {\omega }|$, and in general
$|\boldsymbol {\omega }|$, and in general  $\phi _v$ is positively correlated to
$\phi _v$ is positively correlated to  $|\boldsymbol {\omega }|$.
$|\boldsymbol {\omega }|$.

Figure 2. Temporal evolution of VSF isosurfaces during the downstroke. Left column: the red solid line denotes the plate at the present time and the red dashed line shows the previous location of the plate. Right column: the VSF isosurfaces are colour coded by the vorticity magnitude, with vortex lines integrated from points on the surface. Black and yellow lines represent the counterclockwise and clockwise vortex lines, respectively. (a)  $t=0.25T$,
$t=0.25T$,  $\phi _v=0.3$; (b)
$\phi _v=0.3$; (b)  $t=0.35T$,
$t=0.35T$,  $\phi _v=0.9$ (dark inner surface) and
$\phi _v=0.9$ (dark inner surface) and  $\phi _v=0.3$ (light outer surface). The black line is integrated on the surface of
$\phi _v=0.3$ (light outer surface). The black line is integrated on the surface of  $\phi _v=0.3$ and the yellow line is integrated on the surface of
$\phi _v=0.3$ and the yellow line is integrated on the surface of  $\phi _v=0.9$; (c)
$\phi _v=0.9$; (c)  $t=0.5T$,
$t=0.5T$,  $\phi _v=0.6$ (dark inner surface) and
$\phi _v=0.6$ (dark inner surface) and  $\phi _v=0.3$ (light outer surface). The tip vortex line is integrated on the surface of
$\phi _v=0.3$ (light outer surface). The tip vortex line is integrated on the surface of  $\phi _v=0.3$ and the other lines are integrated on the surface of
$\phi _v=0.3$ and the other lines are integrated on the surface of  $\phi _v=0.6$.
$\phi _v=0.6$.
The plate begins to heave downwards at the end of the upstroke at  $t=T/4$. During the downstroke, the vortex surface around the plate with negative
$t=T/4$. During the downstroke, the vortex surface around the plate with negative  $\alpha$ generates a secondary bulge
$\alpha$ generates a secondary bulge  $V_2$ consisting of clockwise vortex lines from the top view. As shown in figure 2(b), the inner vortical structure
$V_2$ consisting of clockwise vortex lines from the top view. As shown in figure 2(b), the inner vortical structure  $V_2$ with
$V_2$ with  $\phi _v=0.9$ is wrapped by the outer structure
$\phi _v=0.9$ is wrapped by the outer structure  $V_1$ with
$V_1$ with  $\phi _v = 0.3$ at the trailing edge, where the additional isocontour level
$\phi _v = 0.3$ at the trailing edge, where the additional isocontour level  $\phi _v=0.9$ is selected to represent a vortex surface in the high vorticity region. At the junction of
$\phi _v=0.9$ is selected to represent a vortex surface in the high vorticity region. At the junction of  $V_1$ and
$V_1$ and  $V_2$ on the upper surface of the plate, the cancellation of clockwise and counterclockwise vortex lines significantly weakens the vorticity magnitude. Then,
$V_2$ on the upper surface of the plate, the cancellation of clockwise and counterclockwise vortex lines significantly weakens the vorticity magnitude. Then,  $V_1$ moves downstream and is gradually shed from the plate owing to the alternating sign of
$V_1$ moves downstream and is gradually shed from the plate owing to the alternating sign of  $\alpha$. By contrast, in the flow past a stationary plate with positive
$\alpha$. By contrast, in the flow past a stationary plate with positive  $\alpha$, vortex surfaces with counterclockwise vortex lines are persistently rolled up from the tip region (see Tong et al. Reference Tong, Yang and Wang2020).
$\alpha$, vortex surfaces with counterclockwise vortex lines are persistently rolled up from the tip region (see Tong et al. Reference Tong, Yang and Wang2020).
During the downstroke in figure 2(c), we distinguish two types of vortex lines according to their original locations. The vortex lines generated at the trailing edge and the tip region are referred to as the trailing-edge and tip vortex lines, respectively. We observe that  $V_1$ is dominated by the ring-like trailing-edge vortex lines in figure 2(c). The junction of outer
$V_1$ is dominated by the ring-like trailing-edge vortex lines in figure 2(c). The junction of outer  $V_1$ with
$V_1$ with  $\phi _v=0.3$ and inner
$\phi _v=0.3$ and inner  $V_2$ with an additional isocontour level
$V_2$ with an additional isocontour level  $\phi _v=0.6$ is dominated by the tip vortex lines with weak vorticity magnitude, and then
$\phi _v=0.6$ is dominated by the tip vortex lines with weak vorticity magnitude, and then  $V_1$ is gradually shed off with disappearing tip vortex lines.
$V_1$ is gradually shed off with disappearing tip vortex lines.
3.2. Generation of spoon-like vortex surfaces
In the downstroke period from  $t=0.25T$ to
$t=0.25T$ to  $0.75T$, the plate heaves from its highest to its lowest position, generating strong tip vortex lines on
$0.75T$, the plate heaves from its highest to its lowest position, generating strong tip vortex lines on  $V_2$. Subsequently,
$V_2$. Subsequently,  $V_2$ evolves into a spoon-like structure, composed of a bowl-like structure and a spinous handle in figure 3. Its geometry is very different from the ring-like
$V_2$ evolves into a spoon-like structure, composed of a bowl-like structure and a spinous handle in figure 3. Its geometry is very different from the ring-like  $V_1$ generated in the first upstroke period from
$V_1$ generated in the first upstroke period from  $t=0$ to
$t=0$ to  $0.25T$.
$0.25T$.

Figure 3. Temporal evolution of the VSF isosurface of  $\phi _v=0.3$ during formation and shedding of spoon-like structures. The notations are the same as in figure 2: (a)
$\phi _v=0.3$ during formation and shedding of spoon-like structures. The notations are the same as in figure 2: (a)  $t=0.75T$; (b)
$t=0.75T$; (b)  $t=T$; (c)
$t=T$; (c)  $t=1.25T$.
$t=1.25T$.
When the plate retains a negative  $\alpha$ in the downstroke, vortex surface
$\alpha$ in the downstroke, vortex surface  $V_2$ continuously deforms in the leading-edge and tip regions. We divide
$V_2$ continuously deforms in the leading-edge and tip regions. We divide  $V_2$ into two parts by the isosurface of
$V_2$ into two parts by the isosurface of  $\omega _x=0$ (Tong et al. Reference Tong, Yang and Wang2020), where
$\omega _x=0$ (Tong et al. Reference Tong, Yang and Wang2020), where  $\omega _x$ is the streamwise vorticity component. In figure 3(a), the upstream part generated from the leading edge is referred to as the leading-edge vortex (LEV), and the downstream part generated from the tip region is referred to as the tip vortex (TIV). The TIV lines connecting the LEV and TIV constitute the main structure in the later evolution. The trailing-edge vortex lines are wrapped up by outer TIV lines. They gradually vanish owing to the vorticity cancellation under the intensive swirling motion induced by TIV lines with strong entrainment (Taira & Colonius Reference Taira and Colonius2009; Lee et al. Reference Lee, Hsieh, Chang and Chu2012).
$\omega _x$ is the streamwise vorticity component. In figure 3(a), the upstream part generated from the leading edge is referred to as the leading-edge vortex (LEV), and the downstream part generated from the tip region is referred to as the tip vortex (TIV). The TIV lines connecting the LEV and TIV constitute the main structure in the later evolution. The trailing-edge vortex lines are wrapped up by outer TIV lines. They gradually vanish owing to the vorticity cancellation under the intensive swirling motion induced by TIV lines with strong entrainment (Taira & Colonius Reference Taira and Colonius2009; Lee et al. Reference Lee, Hsieh, Chang and Chu2012).
At the end of downstroke, the plate heaves upwards, generating another counterclockwise vortex bulge  $V_3$ in figure 3(b,c). In the meantime,
$V_3$ in figure 3(b,c). In the meantime,  $V_2$ is shed off from the plate, which is similar to the shedding of
$V_2$ is shed off from the plate, which is similar to the shedding of  $V_1$ in § 3.1 owing to the cancellation of opposite vorticities in the region between
$V_1$ in § 3.1 owing to the cancellation of opposite vorticities in the region between  $V_2$ and
$V_2$ and  $V_3$. In the evolution of
$V_3$. In the evolution of  $V_2$ in figure 3(a), the ring-like TIV lines are lifted in the upstream (marked by the light grey arrow) owing to the continuous rolling up of vortex surfaces at the leading edge during the downstroke period. The TIV lines are stretched in the streamwise direction by the mean shear, and are compressed in the spanwise direction by the induced velocity of two TIVs downstream (marked by dark grey arrows). The TIVs then evolve into spoon-like structures in figure 3(b) with the merging of two TIVs, which was not observed for the VSF evolution of the flow past a stationary plate in Tong et al. (Reference Tong, Yang and Wang2020). Subsequently,
$V_2$ in figure 3(a), the ring-like TIV lines are lifted in the upstream (marked by the light grey arrow) owing to the continuous rolling up of vortex surfaces at the leading edge during the downstroke period. The TIV lines are stretched in the streamwise direction by the mean shear, and are compressed in the spanwise direction by the induced velocity of two TIVs downstream (marked by dark grey arrows). The TIVs then evolve into spoon-like structures in figure 3(b) with the merging of two TIVs, which was not observed for the VSF evolution of the flow past a stationary plate in Tong et al. (Reference Tong, Yang and Wang2020). Subsequently,  $V_2$ is shed off as a discrete spoon-like vortex surface in the wake in figure 3(c).
$V_2$ is shed off as a discrete spoon-like vortex surface in the wake in figure 3(c).
3.3. Periodic shedding of vortex surfaces
The shedding of spoon-like vortex surfaces from the flapping plate is periodic. In a time period of  $0.5T$, the counterclockwise or clockwise vortex surface is created during the upstroke or downstroke, respectively. Then, the newly generated, discrete vortex surfaces propagate downstream.
$0.5T$, the counterclockwise or clockwise vortex surface is created during the upstroke or downstroke, respectively. Then, the newly generated, discrete vortex surfaces propagate downstream.
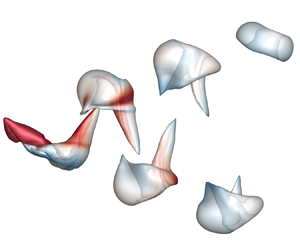
Figure 4 depicts the top and side views of the VSF isosurface of  $\phi _v=0.3$ at
$\phi _v=0.3$ at  $t=3T$. There are two sets of discrete vortex surfaces propagating towards the positive and negative
$t=3T$. There are two sets of discrete vortex surfaces propagating towards the positive and negative  $z$-directions. Each set is composed of discrete vortex surfaces generated at the end of upstroke or downstroke of the plate. From the top view in figure 4(a), a row of circular wake structures are compressed in the spanwise direction induced by TIVs. From the side view in figure 4(b), almost all the spoon-like vortex surfaces consist of TIV lines, except ring-like
$z$-directions. Each set is composed of discrete vortex surfaces generated at the end of upstroke or downstroke of the plate. From the top view in figure 4(a), a row of circular wake structures are compressed in the spanwise direction induced by TIVs. From the side view in figure 4(b), almost all the spoon-like vortex surfaces consist of TIV lines, except ring-like  $V_1$ dominated by trailing-edge vortex lines.
$V_1$ dominated by trailing-edge vortex lines.

Figure 4. The VSF isosurface of  $\phi _v=0.3$ at
$\phi _v=0.3$ at  $t=3T$ in (a) top view and (b) side view, where
$t=3T$ in (a) top view and (b) side view, where  $D_1$ (black solid line) and
$D_1$ (black solid line) and  $D_2$ (blue dashed line) are two types of integral domains enclosing the plate for calculating the total force in (4.3). (c) Contour of the spanwise vorticity on the spanwise symmetry plane at
$D_2$ (blue dashed line) are two types of integral domains enclosing the plate for calculating the total force in (4.3). (c) Contour of the spanwise vorticity on the spanwise symmetry plane at  $y=0$.
$y=0$.
We extract and label the discrete vortex surfaces by an automatic searching and flooding algorithm, and then track their evolution in the wake. At a particular time  $t$, we count the total number,
$t$, we count the total number,  $N(t)$, of discrete vortex surfaces, e.g.
$N(t)$, of discrete vortex surfaces, e.g.  $N(t=3T)=7$ in figure 4(b). For the
$N(t=3T)=7$ in figure 4(b). For the  $N(t)$ vortex surfaces, the
$N(t)$ vortex surfaces, the  $i$th one is labelled as
$i$th one is labelled as  $V_i$ in an ascending sequence according to its shedding time, i.e.
$V_i$ in an ascending sequence according to its shedding time, i.e.  $i=1$ is for the first shedding surface, and
$i=1$ is for the first shedding surface, and  $i=N(t)$ is for the surface enclosing the plate.
$i=N(t)$ is for the surface enclosing the plate.
The evolution of spoon-like vortex surfaces in the wake in figure 4(b) can be roughly split into two phases. First, the vortex surface evolves with the local induction of adjacent vortex surfaces. The upstream part of a vortex surface (e.g.  $V_4$) is lifted to form a ‘nose’ by the induction of TIVs of its upstream spoon-like vortex surface (e.g.
$V_4$) is lifted to form a ‘nose’ by the induction of TIVs of its upstream spoon-like vortex surface (e.g.  $V_5$), similar to the vortex contrail structure observed in Dong et al. (Reference Dong, Mittal and Najjar2006). In the second phase, the vortex surface evolves almost independently owing to the diminishing induction effect among separating vortex surfaces. As the spoon-like vortex surface convects downstream, its upstream nose-like structure and downstream handle-like structure are gradually smoothed out, evolving into a ring-like vortex surface (e.g.
$V_5$), similar to the vortex contrail structure observed in Dong et al. (Reference Dong, Mittal and Najjar2006). In the second phase, the vortex surface evolves almost independently owing to the diminishing induction effect among separating vortex surfaces. As the spoon-like vortex surface convects downstream, its upstream nose-like structure and downstream handle-like structure are gradually smoothed out, evolving into a ring-like vortex surface (e.g.  $V_2$).
$V_2$).
The discrete vortex surface in the wake was simplified as a vortex ring for further theoretical analysis, which is detailed in Appendix B. As sketched in figure 4(c), the radius  $a$ and the inclination angle
$a$ and the inclination angle  $\beta$ of the vortex ring are determined by the spanwise vorticity
$\beta$ of the vortex ring are determined by the spanwise vorticity  $\omega _y$ on the spanwise symmetry plane.
$\omega _y$ on the spanwise symmetry plane.
4. Estimating forces from the wake
4.1. Impulse theory for a finite domain
From the wake information of a flapping plate, we estimate aerodynamic forces acting on the plate using the impulse theory (see Wu Reference Wu1981; Wu et al. Reference Wu, Ma and Zhou2015). In a three-dimensional incompressible viscous flow, the total force on a moving body is
 \begin{equation} \boldsymbol{F}={-}\frac{\mathrm{d} \boldsymbol{I}_{f \infty}}{\mathrm{d} t}+\frac{1}{2} \frac{\mathrm{d}}{\mathrm{d} t} \int_{\partial B} \boldsymbol{x} \times(\boldsymbol{n} \times \rho \boldsymbol{u}) \,\mathrm{d} S, \end{equation}
\begin{equation} \boldsymbol{F}={-}\frac{\mathrm{d} \boldsymbol{I}_{f \infty}}{\mathrm{d} t}+\frac{1}{2} \frac{\mathrm{d}}{\mathrm{d} t} \int_{\partial B} \boldsymbol{x} \times(\boldsymbol{n} \times \rho \boldsymbol{u}) \,\mathrm{d} S, \end{equation}where
 \begin{equation} \boldsymbol{I}_{f \infty} = \tfrac{1}{2} \int_{\mathcal{V}_{f \infty}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
\begin{equation} \boldsymbol{I}_{f \infty} = \tfrac{1}{2} \int_{\mathcal{V}_{f \infty}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
is the vortical impulse in the entire fluid domain  $\mathcal {V}_{f \infty }$,
$\mathcal {V}_{f \infty }$,  $\partial B$ is the body surface and
$\partial B$ is the body surface and  $\boldsymbol {n}$ is the unit surface normal.
$\boldsymbol {n}$ is the unit surface normal.
From the impulse theory for a finite domain  $\mathcal {V}_{f}$ bounded by surface
$\mathcal {V}_{f}$ bounded by surface  $\varSigma$ in flows with discrete wake vortices (see Wu et al. Reference Wu, Lu and Zhuang2007; Kang et al. Reference Kang, Liu, Su and Wu2018), the total force on the plate becomes
$\varSigma$ in flows with discrete wake vortices (see Wu et al. Reference Wu, Lu and Zhuang2007; Kang et al. Reference Kang, Liu, Su and Wu2018), the total force on the plate becomes
 \begin{equation} \boldsymbol{F}={-}\frac{\mathrm{d} \boldsymbol{I}_{f}}{\mathrm{d} t}- \boldsymbol{L}+\boldsymbol{F}_{\partial B}+\boldsymbol{F}_{\omega_n}+\boldsymbol{F}_{\varSigma}. \end{equation}
\begin{equation} \boldsymbol{F}={-}\frac{\mathrm{d} \boldsymbol{I}_{f}}{\mathrm{d} t}- \boldsymbol{L}+\boldsymbol{F}_{\partial B}+\boldsymbol{F}_{\omega_n}+\boldsymbol{F}_{\varSigma}. \end{equation}Here,
 \begin{equation} \boldsymbol{I}_{f} = \tfrac{1}{2} \int_{\mathcal{V}_{f}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V, \end{equation}
\begin{equation} \boldsymbol{I}_{f} = \tfrac{1}{2} \int_{\mathcal{V}_{f}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V, \end{equation}
denotes the vortical impulse in the finite domain  $\mathcal {V}_{f}$,
$\mathcal {V}_{f}$,
 \begin{equation} \boldsymbol{L}=\int_{\mathcal{V}_{f}} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V, \end{equation}
\begin{equation} \boldsymbol{L}=\int_{\mathcal{V}_{f}} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V, \end{equation}
denotes the integral of the Lamb vector  $\boldsymbol {\omega } \times \boldsymbol {u}$,
$\boldsymbol {\omega } \times \boldsymbol {u}$,
 \begin{equation} \boldsymbol{F}_{\partial B} = \tfrac{1}{2} \int_{\partial B} \boldsymbol{x} \times(\boldsymbol{n} \times \rho \boldsymbol{a}) \,\mathrm{d} S+\tfrac{1}{2} \int_{\partial B} \boldsymbol{x} \times \rho \boldsymbol{u} \omega_{n} \,\mathrm{d} S, \end{equation}
\begin{equation} \boldsymbol{F}_{\partial B} = \tfrac{1}{2} \int_{\partial B} \boldsymbol{x} \times(\boldsymbol{n} \times \rho \boldsymbol{a}) \,\mathrm{d} S+\tfrac{1}{2} \int_{\partial B} \boldsymbol{x} \times \rho \boldsymbol{u} \omega_{n} \,\mathrm{d} S, \end{equation}
denotes the force contributed by the body motion and deformation with the acceleration  $\boldsymbol {a}$ of the body and the vorticity component
$\boldsymbol {a}$ of the body and the vorticity component  $\omega _{n}$ normal to
$\omega _{n}$ normal to  $\partial B$,
$\partial B$,
 \begin{equation} \boldsymbol{F}_{\omega_n}=\tfrac{1}{2} \int_{\varSigma} \boldsymbol{x} \times \rho \boldsymbol{u} \omega_{n} \,\mathrm{d} S, \end{equation}
\begin{equation} \boldsymbol{F}_{\omega_n}=\tfrac{1}{2} \int_{\varSigma} \boldsymbol{x} \times \rho \boldsymbol{u} \omega_{n} \,\mathrm{d} S, \end{equation}
denotes the force due to the normal vorticity on  $\varSigma$ with the vorticity component
$\varSigma$ with the vorticity component  $\omega _n$ normal to
$\omega _n$ normal to  $\varSigma$ and
$\varSigma$ and
 \begin{equation} \boldsymbol{F}_{\varSigma} = \tfrac{1}{2} \int_{\varSigma}(\boldsymbol{x} \times \rho \boldsymbol{\sigma}+\boldsymbol{\tau}) \,\mathrm{d} S \end{equation}
\begin{equation} \boldsymbol{F}_{\varSigma} = \tfrac{1}{2} \int_{\varSigma}(\boldsymbol{x} \times \rho \boldsymbol{\sigma}+\boldsymbol{\tau}) \,\mathrm{d} S \end{equation}
is the viscous force calculated on  $\varSigma$ with the diffusive vorticity flux
$\varSigma$ with the diffusive vorticity flux  $\boldsymbol {\sigma }=\nu \partial \boldsymbol {\omega } / \partial n$ and the shear stress
$\boldsymbol {\sigma }=\nu \partial \boldsymbol {\omega } / \partial n$ and the shear stress  $\boldsymbol {\tau }=\mu \boldsymbol {\omega } \times \boldsymbol {n}$. We validate that the relative discrepancy between the total forces calculated from (4.3) in the impulse theory and directly from the DNS data for the present cases is only approximately
$\boldsymbol {\tau }=\mu \boldsymbol {\omega } \times \boldsymbol {n}$. We validate that the relative discrepancy between the total forces calculated from (4.3) in the impulse theory and directly from the DNS data for the present cases is only approximately  $1\,\%$.
$1\,\%$.
Some terms in (4.3) can be neglected in the present cases. The thin plate with negligible deformation implies  $\boldsymbol {F}_{\partial B} = 0$ owing to the vanishing
$\boldsymbol {F}_{\partial B} = 0$ owing to the vanishing  $\omega _{n}$ on the body surface and opposite
$\omega _{n}$ on the body surface and opposite  $\boldsymbol {n}$ on the top and bottom plates. For high
$\boldsymbol {n}$ on the top and bottom plates. For high  $Re$,
$Re$,  $\boldsymbol {F}_{\varSigma }$ for the viscous effect is neglected. In the present simulation with
$\boldsymbol {F}_{\varSigma }$ for the viscous effect is neglected. In the present simulation with  $Re=200$, the contribution of
$Re=200$, the contribution of  $\boldsymbol {F}_{\varSigma }$ on the total force is only approximately
$\boldsymbol {F}_{\varSigma }$ on the total force is only approximately  $0.1\,\%$. Thus, the total force of the flapping plate is determined by the vortical impulse, the Lamb-vector integral and the surface integral
$0.1\,\%$. Thus, the total force of the flapping plate is determined by the vortical impulse, the Lamb-vector integral and the surface integral  $\boldsymbol {F}_{\omega _n}$ over the boundary of a finite fluid domain in (4.3).
$\boldsymbol {F}_{\omega _n}$ over the boundary of a finite fluid domain in (4.3).
4.2. Impulse theory based on vortex surfaces
In order to further simplify (4.3), it is crucial to choose an appropriate domain boundary  $\varSigma$ to minimize
$\varSigma$ to minimize  $\boldsymbol F_\omega$ in (4.7).
$\boldsymbol F_\omega$ in (4.7).
First, Kang et al. (Reference Kang, Liu, Su and Wu2018) proposed a strict constraint,  $\boldsymbol {\omega }=0$ at and near
$\boldsymbol {\omega }=0$ at and near  $\varSigma$, to eliminate
$\varSigma$, to eliminate  $\boldsymbol {F}_{\omega _n}$ in the minimum-domain impulse theory, but this condition is hard to satisfy in three-dimensional flows. Second, a simple domain facilitates the calculation of the surface integral in
$\boldsymbol {F}_{\omega _n}$ in the minimum-domain impulse theory, but this condition is hard to satisfy in three-dimensional flows. Second, a simple domain facilitates the calculation of the surface integral in  $\boldsymbol {F}_{\omega _n}$, e.g. a rectangular domain
$\boldsymbol {F}_{\omega _n}$, e.g. a rectangular domain  $\mathcal {V}_{f}$ enclosing the body (Wang et al. Reference Wang, Zhang, He and Liu2013). However,
$\mathcal {V}_{f}$ enclosing the body (Wang et al. Reference Wang, Zhang, He and Liu2013). However,  $\boldsymbol {F}_{\omega _n}$ is non-vanishing in (4.3), e.g. the positive contribution of
$\boldsymbol {F}_{\omega _n}$ is non-vanishing in (4.3), e.g. the positive contribution of  $\boldsymbol {F}_{\omega _n}$ to the time-averaged thrust can be approximately
$\boldsymbol {F}_{\omega _n}$ to the time-averaged thrust can be approximately  $50\,\%$ in our Case 1 with
$50\,\%$ in our Case 1 with  $\mathcal {V}_{f} = D_1$ enclosed by the black solid line in figure 4(b). Third, an integral domain cutting a small portion of vorticity is another option to minimize
$\mathcal {V}_{f} = D_1$ enclosed by the black solid line in figure 4(b). Third, an integral domain cutting a small portion of vorticity is another option to minimize  $\boldsymbol F_\omega$. Li & Lu (Reference Li and Lu2012) chose a domain enclosing two discrete vortical structures near the plate, e.g.
$\boldsymbol F_\omega$. Li & Lu (Reference Li and Lu2012) chose a domain enclosing two discrete vortical structures near the plate, e.g.  $\mathcal {V}_{f} = D_2$ enclosed by the blue dashed curve in figure 4(b), but
$\mathcal {V}_{f} = D_2$ enclosed by the blue dashed curve in figure 4(b), but  $D_2$ should move with the vortical structure at different times and its geometry varies with different flow parameters, so it has to be determined ad hoc for different cases.
$D_2$ should move with the vortical structure at different times and its geometry varies with different flow parameters, so it has to be determined ad hoc for different cases.
Compared with the existing options for  $\varSigma$, the VSF isosurface is a more natural choice, because it has
$\varSigma$, the VSF isosurface is a more natural choice, because it has  $\boldsymbol {F}_{\omega _n}=0$ with
$\boldsymbol {F}_{\omega _n}=0$ with  $\omega _n=0$ on
$\omega _n=0$ on  $\varSigma$ and evolves with time. Based on the VSF, we choose
$\varSigma$ and evolves with time. Based on the VSF, we choose  $\varSigma$ as a particular vortex surface
$\varSigma$ as a particular vortex surface  $\varSigma _{b}$ enclosing the plate in figure 5. In this way, (4.3) is simplified to
$\varSigma _{b}$ enclosing the plate in figure 5. In this way, (4.3) is simplified to
 \begin{equation} \boldsymbol{F}={-}\frac{\mathrm{d} \boldsymbol{I}_{b}}{\mathrm{d} t}-\boldsymbol{L}_b, \end{equation}
\begin{equation} \boldsymbol{F}={-}\frac{\mathrm{d} \boldsymbol{I}_{b}}{\mathrm{d} t}-\boldsymbol{L}_b, \end{equation}where
 \begin{equation} \boldsymbol{I}_{b} = \tfrac{1}{2} \int_{\mathcal{V}_{b}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
\begin{equation} \boldsymbol{I}_{b} = \tfrac{1}{2} \int_{\mathcal{V}_{b}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
denotes the vortical impulse in a finite fluid domain  $\mathcal {V}_{b}$ enclosed by
$\mathcal {V}_{b}$ enclosed by  $\varSigma _{b}$, and
$\varSigma _{b}$, and
 \begin{equation} \boldsymbol{L}_b=\int_{\mathcal{V}_{b}} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V \end{equation}
\begin{equation} \boldsymbol{L}_b=\int_{\mathcal{V}_{b}} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V \end{equation}
denotes the Lamb-vector integral over  $\mathcal {V}_{b}$. As sketched in figure 5,
$\mathcal {V}_{b}$. As sketched in figure 5,  $\boldsymbol F$ is only determined by the velocity–vorticity field within
$\boldsymbol F$ is only determined by the velocity–vorticity field within  $\mathcal {V}_{b}$. Then we obtain the thrust force
$\mathcal {V}_{b}$. Then we obtain the thrust force
 \begin{equation} F_T=\frac{\mathrm{d} I_{b,x}}{\mathrm{d} t}+ L_{b,x}, \end{equation}
\begin{equation} F_T=\frac{\mathrm{d} I_{b,x}}{\mathrm{d} t}+ L_{b,x}, \end{equation}
where  $I_{b,x}$ and
$I_{b,x}$ and  $L_{b,x}$ are the streamwise components of
$L_{b,x}$ are the streamwise components of  $\boldsymbol {I}_{b}$ and
$\boldsymbol {I}_{b}$ and  $\boldsymbol {L}_b$, respectively.
$\boldsymbol {L}_b$, respectively.

Figure 5. Sketch of vortex surfaces in the near wake and far wake of a flapping plate.
In the present cases, the time-averaged thrust can be determined by
 \begin{equation} \bar{F}_T =\overline{\frac{\mathrm{d} I_{b,x}}{\mathrm{d} t}}+\bar{L}_{b,x} \end{equation}
\begin{equation} \bar{F}_T =\overline{\frac{\mathrm{d} I_{b,x}}{\mathrm{d} t}}+\bar{L}_{b,x} \end{equation}
over a half-period  $T_f=T/2$ within either one downstroke or upstroke owing to the periodic flapping motion of the plate, where
$T_f=T/2$ within either one downstroke or upstroke owing to the periodic flapping motion of the plate, where  $\bar {f}$ denotes the time average of a function
$\bar {f}$ denotes the time average of a function  $f$ over
$f$ over  $T_f$. Without loss of generality, we choose one downstroke period to estimate
$T_f$. Without loss of generality, we choose one downstroke period to estimate  $\bar {F}_T$. Figure 6 sketches the formation and shedding of the
$\bar {F}_T$. Figure 6 sketches the formation and shedding of the  $i$th vortex surface
$i$th vortex surface  $V_i$ from the plate with
$V_i$ from the plate with  $i \geq 3$. We define the beginning time
$i \geq 3$. We define the beginning time  $t_i'=T/4+(i-2)T_f$ of downstroke in figure 6(a), the end time
$t_i'=T/4+(i-2)T_f$ of downstroke in figure 6(a), the end time  $t_i''=T/4+(i-1)T_f$ of downstroke in figure 6(b) and the shedding time
$t_i''=T/4+(i-1)T_f$ of downstroke in figure 6(b) and the shedding time  $t_i^s \approx t_i''+T_f = T/4+i T_f$ of
$t_i^s \approx t_i''+T_f = T/4+i T_f$ of  $V_i$ in figure 6(c) when
$V_i$ in figure 6(c) when  $V_i$ is just shed from the plate.
$V_i$ is just shed from the plate.

Figure 6. Sketch of formation and shedding of vortex surface  $V_i$ at different times: (a)
$V_i$ at different times: (a)  $t=t_i'$, the beginning time of downstroke; (b)
$t=t_i'$, the beginning time of downstroke; (b)  $t=t_i''$, the end time of downstroke; (c)
$t=t_i''$, the end time of downstroke; (c)  $t=t_i^s$, the shedding time of
$t=t_i^s$, the shedding time of  $V_i$. The vortex surfaces with counterclockwise and clockwise vortex lines are coloured in blue and yellow, respectively. The Lagrangian-like evolution of
$V_i$. The vortex surfaces with counterclockwise and clockwise vortex lines are coloured in blue and yellow, respectively. The Lagrangian-like evolution of  $\varSigma _b$ labelled at
$\varSigma _b$ labelled at  $t = t_i'$ is marked by the red dashed curves.
$t = t_i'$ is marked by the red dashed curves.
During the downstroke from  $t=t_i'$ to
$t=t_i'$ to  $t=t_i''$ for the generation of
$t=t_i''$ for the generation of  $V_i$, the Lagrangian-like evolution of
$V_i$, the Lagrangian-like evolution of  $\varSigma _b$ is marked by the red dashed curves in figure 6(a,b). Since the shedding of spoon-like vortex surfaces from the flapping plate is periodic, we estimate
$\varSigma _b$ is marked by the red dashed curves in figure 6(a,b). Since the shedding of spoon-like vortex surfaces from the flapping plate is periodic, we estimate
 \begin{equation} \overline{\frac{\mathrm{d} I_{b,x}}{\mathrm{d} t}} = \frac{I_{b,x}(t_i'') - I_{b,x}(t_i')}{T_f} \approx \frac{I_{i-1,x}(t_{i}'')}{T_f}\approx \frac{I_{i,x}^s}{T_f} \end{equation}
\begin{equation} \overline{\frac{\mathrm{d} I_{b,x}}{\mathrm{d} t}} = \frac{I_{b,x}(t_i'') - I_{b,x}(t_i')}{T_f} \approx \frac{I_{i-1,x}(t_{i}'')}{T_f}\approx \frac{I_{i,x}^s}{T_f} \end{equation}
in (4.13), where  $I_{i,x}^s$ denotes the streamwise component of the vortical impulse
$I_{i,x}^s$ denotes the streamwise component of the vortical impulse
 \begin{equation} \boldsymbol{I}_{i}^s = \tfrac{1}{2} \int_{V_{i}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
\begin{equation} \boldsymbol{I}_{i}^s = \tfrac{1}{2} \int_{V_{i}} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
for  $V_i$ at its shedding time
$V_i$ at its shedding time  $t=t_i^s$, and all the
$t=t_i^s$, and all the  $I_{i,x}^s = I_x^s$ are the same for
$I_{i,x}^s = I_x^s$ are the same for  $3 \le i \le N$. Then, the time-averaged thrust
$3 \le i \le N$. Then, the time-averaged thrust
 \begin{equation} \bar{F}_T =\frac{I_x^s}{T_f}+\bar{L}_{b,x} \end{equation}
\begin{equation} \bar{F}_T =\frac{I_x^s}{T_f}+\bar{L}_{b,x} \end{equation}
acting on the plate can be estimated based on the velocity–vorticity field within  $\mathcal {V}_{b}$ enclosed by the vortex surface.
$\mathcal {V}_{b}$ enclosed by the vortex surface.
For the further application, we can also estimate the force only from the shedding vortex surfaces in the near wake and far wake in §§ 4.3 and 4.4, respectively. As sketched in figure 5, the near-wake region has the discrete vortex surfaces close to the plate, and the far-wake region is remote from the plate.
4.3. Estimating thrust from the near wake
In order to estimate time-averaged forces on the plate from the wake, we extend  $\bar {L}_{b,x}$ in (4.16) based on the vortex surface enclosing the plate to an expression based on discrete vortex surfaces in the wake. Since the Lamb-vector integral
$\bar {L}_{b,x}$ in (4.16) based on the vortex surface enclosing the plate to an expression based on discrete vortex surfaces in the wake. Since the Lamb-vector integral
 \begin{equation} \int_{\mathcal{V}_{f\infty}} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V=\boldsymbol{L}_b+\boldsymbol{L}_{wake} =0 \end{equation}
\begin{equation} \int_{\mathcal{V}_{f\infty}} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V=\boldsymbol{L}_b+\boldsymbol{L}_{wake} =0 \end{equation}
vanishes in  $\mathcal {V}_{f\infty }$ (Wu et al. Reference Wu, Ma and Zhou2015), which is also validated by our DNS, we obtain
$\mathcal {V}_{f\infty }$ (Wu et al. Reference Wu, Ma and Zhou2015), which is also validated by our DNS, we obtain
 \begin{equation} \boldsymbol{L}_b={-}\boldsymbol{L}_{wake}. \end{equation}
\begin{equation} \boldsymbol{L}_b={-}\boldsymbol{L}_{wake}. \end{equation} Considering the downstroke for generating  $V_i$ from
$V_i$ from  $t=t_i'$ to
$t=t_i'$ to  $t=t_i''$ in figures 6(a) and 6(b), we approximate
$t=t_i''$ in figures 6(a) and 6(b), we approximate
 \begin{equation} \boldsymbol{L}_{wake}=\sum_{j=1}^{i-2}\boldsymbol{L}_j \end{equation}
\begin{equation} \boldsymbol{L}_{wake}=\sum_{j=1}^{i-2}\boldsymbol{L}_j \end{equation}as the sum of the Lamb-vector integral
 \begin{equation} \boldsymbol{L}_j=\int_{V_j} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V, \end{equation}
\begin{equation} \boldsymbol{L}_j=\int_{V_j} \rho \boldsymbol{\omega} \times \boldsymbol{u} \,\mathrm{d} V, \end{equation}
for the  $j$th discrete vortex surface
$j$th discrete vortex surface  $V_{j}$ in the wake.
$V_{j}$ in the wake.
Since the spoon-like vortex surface with finite  $\boldsymbol {L}_j$ evolves towards a ring-like one with
$\boldsymbol {L}_j$ evolves towards a ring-like one with  $\boldsymbol {L}_j\approx 0$ in the far wake,
$\boldsymbol {L}_j\approx 0$ in the far wake,  $\boldsymbol {L}_j$ decays quickly in the downstream. Hence, we estimate
$\boldsymbol {L}_j$ decays quickly in the downstream. Hence, we estimate
 \begin{equation} \boldsymbol{L}_{wake} \approx \boldsymbol{L}_{i-2} \end{equation}
\begin{equation} \boldsymbol{L}_{wake} \approx \boldsymbol{L}_{i-2} \end{equation}from the near-wake vortex surface in the downstroke, as shown in figures 6(a) and 6(b), and then have
 \begin{equation} \bar{L}_{b,x}={-}\bar{L}_{wake,x}\approx{-}\bar{L}_{i-2,x}, \end{equation}
\begin{equation} \bar{L}_{b,x}={-}\bar{L}_{wake,x}\approx{-}\bar{L}_{i-2,x}, \end{equation}
where  $\bar {L}_{wake,x}$ and
$\bar {L}_{wake,x}$ and  $\bar {L}_{i-2,x}$ denote the time-averaged streamwise components of
$\bar {L}_{i-2,x}$ denote the time-averaged streamwise components of  $\boldsymbol {L}_{wake}$ and
$\boldsymbol {L}_{wake}$ and  $\boldsymbol {L}_{i-2}$, respectively.
$\boldsymbol {L}_{i-2}$, respectively.
Identified by the VSF isosurface at a given time, there are  $N(t)$ vortex surfaces in an instantaneous flow field, and surface
$N(t)$ vortex surfaces in an instantaneous flow field, and surface  $V_{N-1}$ is shed into the wake in figure 5. Substituting (4.22) into (4.16) and taking
$V_{N-1}$ is shed into the wake in figure 5. Substituting (4.22) into (4.16) and taking  $i=N-1$ yields
$i=N-1$ yields
 \begin{equation} \bar{F}_T= \frac{I_x^s}{T_f}-\bar{L}_{N-3,x}. \end{equation}
\begin{equation} \bar{F}_T= \frac{I_x^s}{T_f}-\bar{L}_{N-3,x}. \end{equation}Then, we approximate
 \begin{equation} \bar{L}_{N-3,x}=\frac{1}{T_f} \int_{t_{N-1}'}^{t_{N-1}''} L_{N-3,x} \,\textrm{d}t \approx \frac{L_{N-3,x}(t_{N-1}')+L_{N-3,x}(t_{N-1}'')}{2}, \end{equation}
\begin{equation} \bar{L}_{N-3,x}=\frac{1}{T_f} \int_{t_{N-1}'}^{t_{N-1}''} L_{N-3,x} \,\textrm{d}t \approx \frac{L_{N-3,x}(t_{N-1}')+L_{N-3,x}(t_{N-1}'')}{2}, \end{equation}
where  $L_{N-3,x}(t_{N-1}')$ and
$L_{N-3,x}(t_{N-1}')$ and  $L_{N-3,x}(t_{N-1}'')$ denote the streamwise components of the Lamb-vector integral for
$L_{N-3,x}(t_{N-1}'')$ denote the streamwise components of the Lamb-vector integral for  $V_{N-3}$ at
$V_{N-3}$ at  $t=t_{N-1}'$ and
$t=t_{N-1}'$ and  $t=t_{N-1}''$, respectively. Considering the periodic shedding of vortex surfaces from the flapping plate in
$t=t_{N-1}''$, respectively. Considering the periodic shedding of vortex surfaces from the flapping plate in  $T_f$ (also see figure 6), we have
$T_f$ (also see figure 6), we have  $L_{N-3,x}(t_{N-1}') \approx L_{N-1,x}(t_{N-1}^s)$ and
$L_{N-3,x}(t_{N-1}') \approx L_{N-1,x}(t_{N-1}^s)$ and  $L_{N-3,x}(t_{N-1}'') \approx L_{N-2,x}(t_{N-1}^s)$. Finally, (4.23) is re-expressed by
$L_{N-3,x}(t_{N-1}'') \approx L_{N-2,x}(t_{N-1}^s)$. Finally, (4.23) is re-expressed by
 \begin{equation} \bar{F}_{T}= \frac{I_x^s}{T_f}-\frac{L_{N-1,x}+L_{N-2,x}}{2}, \end{equation}
\begin{equation} \bar{F}_{T}= \frac{I_x^s}{T_f}-\frac{L_{N-1,x}+L_{N-2,x}}{2}, \end{equation}
where all the terms on the right-hand side are determined at  $t=t_{N-1}^s$.
$t=t_{N-1}^s$.
The thrust model (4.25) from the near wake is validated by the DNS result calculated from (2.7). From (4.25), the mean thrust coefficient  $\bar {C}_T$ is estimated as
$\bar {C}_T$ is estimated as
 \begin{equation} \bar{C}_T^N=\bar{C}_T^{I}+\bar{C}_T^{L}. \end{equation}
\begin{equation} \bar{C}_T^N=\bar{C}_T^{I}+\bar{C}_T^{L}. \end{equation}Here, the force contribution from the vortical impulse is
 \begin{equation} \bar{C}_T^{I}=\frac{I_x^s}{\frac{1}{2} \rho U^{2} R_{A}T_fc^2}, \end{equation}
\begin{equation} \bar{C}_T^{I}=\frac{I_x^s}{\frac{1}{2} \rho U^{2} R_{A}T_fc^2}, \end{equation}and the contribution from the Lamb vector is
 \begin{equation} \bar{C}_T^{L}={-}\frac{L_{N-1,x}+L_{N-2,x}}{\rho U^{2} R_{A}c^2}. \end{equation}
\begin{equation} \bar{C}_T^{L}={-}\frac{L_{N-1,x}+L_{N-2,x}}{\rho U^{2} R_{A}c^2}. \end{equation} Table 2 compares the mean thrust coefficients calculated from (2.8), (4.26) and (4.27) in Cases 1–4 listed in table 1 with the varying angle of attack, flapping frequency and Reynolds number. It is noted that the wake in the four cases consists of discrete vortex surfaces, and the force estimation for the wakes with complex topology, Cases 5 and 6, is discussed in Appendix C. We find that  $\bar {C}_T^N$ estimated from the near-wake model agrees well with the DNS result
$\bar {C}_T^N$ estimated from the near-wake model agrees well with the DNS result  $\bar {C}_T$ and the relative errors
$\bar {C}_T$ and the relative errors
 \begin{equation} \varepsilon = \frac{|\bar{C}_T^{model} - \bar{C}_T|}{\bar{C}_T} \end{equation}
\begin{equation} \varepsilon = \frac{|\bar{C}_T^{model} - \bar{C}_T|}{\bar{C}_T} \end{equation}
are approximately  $5\,\%$, where
$5\,\%$, where  $\bar {C}_T^{model}$ denotes a model estimation of
$\bar {C}_T^{model}$ denotes a model estimation of  $\bar {C}_T$. Additionally, we validate that the near-wake model works well with
$\bar {C}_T$. Additionally, we validate that the near-wake model works well with  $\varepsilon \approx 8\,\%$ for the case of a heaving and pitching plate around the leading edge with
$\varepsilon \approx 8\,\%$ for the case of a heaving and pitching plate around the leading edge with  $Re=200$,
$Re=200$,  $St=0.6$ and discrete wake topology in Li & Lu (Reference Li and Lu2012).
$St=0.6$ and discrete wake topology in Li & Lu (Reference Li and Lu2012).
Table 2. Comparison of  $\bar {C}_T$ from DNS,
$\bar {C}_T$ from DNS,  $\bar {C}_T^N$ from the near-wake model,
$\bar {C}_T^N$ from the near-wake model,  $\bar {C}_T^I$ from the impulse model,
$\bar {C}_T^I$ from the impulse model,  $\bar {C}_T^F$ from the far-wake model and
$\bar {C}_T^F$ from the far-wake model and  $\bar {C}_T^R$ from the vortex-ring model for estimating the thrust coefficient in the cases with different parameters in table 1.
$\bar {C}_T^R$ from the vortex-ring model for estimating the thrust coefficient in the cases with different parameters in table 1.

By contrast,  $\bar {C}_T^{I}$ only considering the vortical-impulse contribution is obviously overestimated. Hence, the negative
$\bar {C}_T^{I}$ only considering the vortical-impulse contribution is obviously overestimated. Hence, the negative  $\bar {C}_T^{L}$ contributed from the Lamb vector provides a necessary correction to the impulse model, improving the prediction accuracy of
$\bar {C}_T^{L}$ contributed from the Lamb vector provides a necessary correction to the impulse model, improving the prediction accuracy of  $\bar {C}_T$ by approximately
$\bar {C}_T$ by approximately  $12\,\%$.
$12\,\%$.
In general, the VSF  $\phi _v \in [0,1]$ is positively correlated with the vorticity magnitude. We choose the particular
$\phi _v \in [0,1]$ is positively correlated with the vorticity magnitude. We choose the particular  $\phi _v=0.3$ to discretize the vortex wake. The region enclosed by the isosurface of
$\phi _v=0.3$ to discretize the vortex wake. The region enclosed by the isosurface of  $\phi _v=0.3$ captures approximately
$\phi _v=0.3$ captures approximately  $90\,\%$ of the vortical impulse of shedding vortex surfaces in the entire domain. Thus, we find that the calculation of
$90\,\%$ of the vortical impulse of shedding vortex surfaces in the entire domain. Thus, we find that the calculation of  $I_x^s$ in (4.26) for a single vortex surface is slightly underestimated by
$I_x^s$ in (4.26) for a single vortex surface is slightly underestimated by  $2\,\%$, assuming the similar
$2\,\%$, assuming the similar  $I_x^s$ distribution of all the five vortex surfaces in the wake in figure 4.
$I_x^s$ distribution of all the five vortex surfaces in the wake in figure 4.
For comparison, we also estimate  $\bar {C}_T$ from the near-wake model (4.26) based on the isosurface of Eulerian vortex criteria
$\bar {C}_T$ from the near-wake model (4.26) based on the isosurface of Eulerian vortex criteria  $|\boldsymbol {\omega }|$ and
$|\boldsymbol {\omega }|$ and  $\lambda _2$, and obtain relatively large
$\lambda _2$, and obtain relatively large  $\varepsilon = 17\,\%$ and
$\varepsilon = 17\,\%$ and  $\varepsilon = 32\,\%$, respectively. The major reason is that the isosurface of
$\varepsilon = 32\,\%$, respectively. The major reason is that the isosurface of  $|\boldsymbol {\omega }|$ or
$|\boldsymbol {\omega }|$ or  $\lambda _2$ can have a notable difference from the vortex surface (Yang & Pullin Reference Yang and Pullin2011), so the contribution from the surface integral (4.7) cannot simply be neglected for these isosurfaces. We remark that the choice of the isocontour level of
$\lambda _2$ can have a notable difference from the vortex surface (Yang & Pullin Reference Yang and Pullin2011), so the contribution from the surface integral (4.7) cannot simply be neglected for these isosurfaces. We remark that the choice of the isocontour level of  $|\boldsymbol {\omega }|$ or
$|\boldsymbol {\omega }|$ or  $\lambda _2$ is ad hoc for vortex identification, and we have tuned
$\lambda _2$ is ad hoc for vortex identification, and we have tuned  $|\boldsymbol {\omega }|$ and
$|\boldsymbol {\omega }|$ and  $\lambda _2$ to minimize their corresponding
$\lambda _2$ to minimize their corresponding  $\varepsilon$.
$\varepsilon$.
In addition, the vortex-ring model (see Lauder & Drucker Reference Lauder and Drucker2002; Nauen & Lauder Reference Nauen and Lauder2002; Li & Lu Reference Li and Lu2012) can estimate the mean thrust using the vortical impulse  $I_v=\rho {\rm \pi}\varGamma a^2$ of a vortex ring, where
$I_v=\rho {\rm \pi}\varGamma a^2$ of a vortex ring, where  $\varGamma$ is the circulation of the vortex ring. In Appendix B, we simplify the spoon-like vortex surface in figure 4 to the vortex ring, and determine the mean thrust coefficient
$\varGamma$ is the circulation of the vortex ring. In Appendix B, we simplify the spoon-like vortex surface in figure 4 to the vortex ring, and determine the mean thrust coefficient  $\bar {C}_T^R$ from the modelled vortex ring. In table 2,
$\bar {C}_T^R$ from the modelled vortex ring. In table 2,  $\bar {C}_T^R$ is overestimated and has larger discrepancies than other models for our cases, perhaps owing to the over-simplification of the spoon-like vortex surfaces in figures 3 and 4 as vortex rings. We find that the time-averaged streamwise vortical impulse of ring-like
$\bar {C}_T^R$ is overestimated and has larger discrepancies than other models for our cases, perhaps owing to the over-simplification of the spoon-like vortex surfaces in figures 3 and 4 as vortex rings. We find that the time-averaged streamwise vortical impulse of ring-like  $V_1$ dominated by circular trailing-edge vortex lines is approximately 40 %–50 % larger than that of the spoon-like vortex surfaces with kinked tip vortex lines.
$V_1$ dominated by circular trailing-edge vortex lines is approximately 40 %–50 % larger than that of the spoon-like vortex surfaces with kinked tip vortex lines.
4.4. Estimating thrust from the far wake
From the practical viewpoint, estimating forces on the moving body from the far wake is very useful in the experimental investigation of biological locomotion (Lauder & Drucker Reference Lauder and Drucker2002; Spedding et al. Reference Spedding, Rosén and Hedenström2003) and underwater vehicles (Jiménez et al. Reference Jiménez, Hultmark and Smits2010). As indicated in figure 4, a pair of discrete vortex surfaces are shed form the plate within  $T$, and the wake is dominated by two rows of discrete vortex surfaces. The evolution of vortex pairs in the wake is similar owing to their periodic formation and shedding process. Thus, it is possible to estimate forces based on two arbitrary vortex surfaces in the far wake.
$T$, and the wake is dominated by two rows of discrete vortex surfaces. The evolution of vortex pairs in the wake is similar owing to their periodic formation and shedding process. Thus, it is possible to estimate forces based on two arbitrary vortex surfaces in the far wake.
We define the geometrical centre of vortex surface  $V_i$ as
$V_i$ as
 \begin{equation} \boldsymbol{x}_{c,i}=\frac{\displaystyle\int_{V_i} \boldsymbol{x} \,\mathrm{d}V}{\displaystyle\int_{V_i} \mathrm{d}V}. \end{equation}
\begin{equation} \boldsymbol{x}_{c,i}=\frac{\displaystyle\int_{V_i} \boldsymbol{x} \,\mathrm{d}V}{\displaystyle\int_{V_i} \mathrm{d}V}. \end{equation}
Figure 7(a) shows that the vortex centre moves downstream with a uniform velocity, and the streamwise vortical impulse also linearly decays for all the discrete vortex surfaces. These linear relations are utilized to infer  $I_x^s$ from the far wake.
$I_x^s$ from the far wake.

Figure 7. Temporal evolution of (a) streamwise vortex centre  $x_c$ and (b) streamwise impulse
$x_c$ and (b) streamwise impulse  $I_x$ of discrete vortex surfaces in the wake.
$I_x$ of discrete vortex surfaces in the wake.
We approximate the shedding location  $x_{c,s} = 1.5$ for all the discrete vortex surfaces, corresponding to the position where
$x_{c,s} = 1.5$ for all the discrete vortex surfaces, corresponding to the position where  $I_x^s$ is obtained. Given two arbitrary vortex surfaces
$I_x^s$ is obtained. Given two arbitrary vortex surfaces  $V_a$ and
$V_a$ and  $V_b$ with
$V_b$ with  $a,b = 3,\ldots ,N-1$ in the wake, we estimate the initial streamwise vortical impulse
$a,b = 3,\ldots ,N-1$ in the wake, we estimate the initial streamwise vortical impulse  $I_x^s$ as
$I_x^s$ as
 \begin{equation} I_x^s\approx I_x^F = I_{a,x}+\frac{I_{a,x}-I_{b,x}}{x_{c,b}-x_{c,a}}(x_{c,a}-x_{c,s}), \end{equation}
\begin{equation} I_x^s\approx I_x^F = I_{a,x}+\frac{I_{a,x}-I_{b,x}}{x_{c,b}-x_{c,a}}(x_{c,a}-x_{c,s}), \end{equation}
where  $x_{c,a}$ and
$x_{c,a}$ and  $x_{c,b}$ respectively denote streamwise vortex centres of
$x_{c,b}$ respectively denote streamwise vortex centres of  $V_a$ and
$V_a$ and  $V_b$, and
$V_b$, and  $I_{a,x}$ and
$I_{a,x}$ and  $I_{b,x}$ respectively denote streamwise vortical impulses of
$I_{b,x}$ respectively denote streamwise vortical impulses of  $V_a$ and
$V_a$ and  $V_b$. Then, we estimate the mean thrust coefficient
$V_b$. Then, we estimate the mean thrust coefficient
 \begin{equation} \bar{C}_T^{F}=\frac{A_L I_x^F}{\frac{1}{2} \rho U^{2} R_{A}T_fc^2} \end{equation}
\begin{equation} \bar{C}_T^{F}=\frac{A_L I_x^F}{\frac{1}{2} \rho U^{2} R_{A}T_fc^2} \end{equation}
from the far wake with small  $a$ and
$a$ and  $b$, where
$b$, where  $A_L=0.85$ is an attenuation factor for the Lamb-vector correction. In this far-wake model, we estimate the thrust contributed from the vortical impulse without explicitly considering the Lamb-vector integral, because it is difficult to predict
$A_L=0.85$ is an attenuation factor for the Lamb-vector correction. In this far-wake model, we estimate the thrust contributed from the vortical impulse without explicitly considering the Lamb-vector integral, because it is difficult to predict  $\boldsymbol L$ at the shedding time from the far wake owing to the fast decay of
$\boldsymbol L$ at the shedding time from the far wake owing to the fast decay of  $\boldsymbol L$ downstream. In order to incorporate the negative contribution of
$\boldsymbol L$ downstream. In order to incorporate the negative contribution of  $\boldsymbol L$ to
$\boldsymbol L$ to  $\bar {C}_T$, we alternatively apply the factor
$\bar {C}_T$, we alternatively apply the factor  $A_L=0.85$ in (4.32), which is estimated based on the overall ratio of
$A_L=0.85$ in (4.32), which is estimated based on the overall ratio of  $\bar {C}_T^N$ from the near-wake model and
$\bar {C}_T^N$ from the near-wake model and  $\bar {C}_T^I$ from the impulse model listed in table 2.
$\bar {C}_T^I$ from the impulse model listed in table 2.
The far-wake model predictions from (4.32) with  $a=4$ and
$a=4$ and  $b=3$ generally agree with the DNS results in table 2, and the relative errors
$b=3$ generally agree with the DNS results in table 2, and the relative errors  $\varepsilon \approx 9\,\%$ are, reasonably, larger than those in the near-wake model. The thrust predictions with different
$\varepsilon \approx 9\,\%$ are, reasonably, larger than those in the near-wake model. The thrust predictions with different  $a$ and
$a$ and  $b$ are very similar within
$b$ are very similar within  ${\pm }3\,\%$ variation. Furthermore, we can also calculate
${\pm }3\,\%$ variation. Furthermore, we can also calculate  $I_x^F$ and then estimate
$I_x^F$ and then estimate  $\bar {C}_T^{F}$ from the Lagrangian history of a single vortex surface at different locations at two times within a small time interval.
$\bar {C}_T^{F}$ from the Lagrangian history of a single vortex surface at different locations at two times within a small time interval.
The far-wake model (4.32) implies that the thrust of the flapping plate is determined by the vortical impulse generated during the flapping motion, and the shedding vortex surface with larger  $I_x^F$ can generate larger thrust on the moving body (Spedding et al. Reference Spedding, Rosén and Hedenström2003; Li & Lu Reference Li and Lu2012), which can guide the optimization of the kinematics parameters of the flapping plate in (2.1) and (2.2) to increase the thrust of the flapping plate by shedding the vortex surface with larger
$I_x^F$ can generate larger thrust on the moving body (Spedding et al. Reference Spedding, Rosén and Hedenström2003; Li & Lu Reference Li and Lu2012), which can guide the optimization of the kinematics parameters of the flapping plate in (2.1) and (2.2) to increase the thrust of the flapping plate by shedding the vortex surface with larger  $I_x^F$.
$I_x^F$.
Thus, we provide a possible approach to estimate thrust using only two vortex surfaces in the wake, which can facilitate the estimation of the state of the moving body in experimental investigation and practical applications. In the experimental implementation, the particle image velocimetry (PIV) can be used to measure the three-dimensional flow field in the wake (Buchholz & Smits Reference Buchholz and Smits2008; Mendelson & Techet Reference Mendelson and Techet2015). The PIV data are usually subject to noise, so the time series of raw PIV data need to be corrected, e.g. using the divergence-free smoothing method (Wang et al. Reference Wang, Gao, Wang, Wei, Li and Wang2016). Subsequently, the boundary-constraint method (Xiong & Yang Reference Xiong and Yang2017) can be applied to construct VSFs, then the thrust is estimated based on vortex surfaces in the wake. On the other hand, significant challenges still exist in the implementation, e.g. the incompleteness of velocity/vorticity measurement, accuracy of VSF calculation from under-revolved experimental data and the uncertainty quantification of the force estimation.
5. Conclusions
We investigate the VSF evolution in flows past a flapping plate with a low aspect ratio and estimate the time-averaged thrust from shedding vortex surfaces in the wake. The immersed boundary method is used to obtain the velocity–vorticity field, and the two-time method with source terms is applied to calculate the VSF solution.
The VSF evolution can be roughly split into three stages based on the morphology of vortex surfaces and lines. During the first quarter of the flapping cycle, a vortex bulge dominated by counterclockwise vortex lines is formed, and then it is shed from the trailing edge due to the vorticity cancellation between two adjacent vortex surfaces and evolves into a circular vortex ring in the wake. During the following half-flapping cycle, a spoon-like vortex surface dominated by TIV lines is generated. In the late stage, the spoon-like vortex surfaces are periodically created and shed during the alternating upstroke and downstroke. Two sets of vortex surfaces propagate downstream in the wake, and the spoon-like vortex surface gradually evolves into ring-like vortex in the far wake.
We develop near-wake and far-wake models to estimate the time-averaged thrust from the shedding vortex surfaces in the wake. First, we choose a particular vortex surface as the integral domain in the finite-domain impulse theory, so that the force on the moving body is determined by the vortical impulse and Lamb-vector integral of the vortex surface enclosing the body. Then, the force estimation is extended to that from the discrete vortex surfaces in the wake. Here, the vortical impulse is obtained at the vortex shedding time, and the force contribution from the Lamb-vector integral enclosing the body is approximated by the two discrete vortex surfaces close to the plate. Thus, the time-averaged thrust coefficient can be estimated from the near wake, and our model estimation agrees well with the DNS result in various cases with different angles of attack, flapping frequencies and Reynolds numbers. The relative errors are approximately  $5\,\%$, and they are smaller than those from predictions of the impulse model and the vortex-ring model, which implies the importance of incorporating effects of the Lamb vector in the thrust model and the over-simplification of the spoon-like vortex surfaces as vortex rings.
$5\,\%$, and they are smaller than those from predictions of the impulse model and the vortex-ring model, which implies the importance of incorporating effects of the Lamb vector in the thrust model and the over-simplification of the spoon-like vortex surfaces as vortex rings.
Furthermore, we estimate the time-averaged thrust from two arbitrary vortex surfaces in the far wake based on the self-similar formation and evolution process of vortex surfaces in the periodic flapping motion. The relative errors of the far-wake model are approximately  $9\,\%$, which are larger than the near-wake errors owing to the uncertainty of the force correction from the Lamb-vector integral. This model provides a possible approach to inferring the state of the moving body in experimental investigation and practical applications.
$9\,\%$, which are larger than the near-wake errors owing to the uncertainty of the force correction from the Lamb-vector integral. This model provides a possible approach to inferring the state of the moving body in experimental investigation and practical applications.
We remark that the thrust models developed in this study are restricted to a flapping plate with discrete vortex surfaces in the wake. In future work, the VSF method should be extended to characterize the evolution of vortex surfaces and estimate forces from more complex vortex wakes for higher  $R_A$ and
$R_A$ and  $St$, in which the vortical structures are interconnected. With further improvement, the proposed thrust model is expected to be applied to temporally resolved PIV data in experimental and practical applications.
$St$, in which the vortical structures are interconnected. With further improvement, the proposed thrust model is expected to be applied to temporally resolved PIV data in experimental and practical applications.
Acknowledgements
Numerical simulations were carried out on the TH-2A supercomputer in Guangzhou, China.
Funding
This work has been supported in part by the National Natural Science Foundation of China (Nos. 91952108, 11925201, 11988102 and 91841302) and the Xplore Prize.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Mesh convergence test
The numerical implementation of the immersed boundary method in the present study has been validated in previous studies, including the three-dimensional flow past a three-dimensional stationary plate (Wang & Zhang Reference Wang and Zhang2011) and flapping plate (Wang et al. Reference Wang, Zhang, He and Liu2013, Reference Wang, He and Liu2019). Additional validations for the effectiveness of the present mesh spacing and computational domain are given below.
We simulated the flow past a flapping plate on four meshes  $M_1$,
$M_1$,  $M_2$,
$M_2$,  $M_3$ and
$M_3$ and  $M_4$ with the minimum spacings
$M_4$ with the minimum spacings  $\Delta x=0.02$,
$\Delta x=0.02$,  $0.015$,
$0.015$,  $0.0125$ and
$0.0125$ and  $0.01$, respectively. The detail of each mesh is listed on table 3. Figure 8 shows the time-dependent thrust coefficient with four meshes for Case 1 in table 1, and we observe that the thrust coefficient is converged with the decrease of minimum spacing. The time step is chosen to keep the Courant–Friedrichs–Lewy number at 0.5.
$0.01$, respectively. The detail of each mesh is listed on table 3. Figure 8 shows the time-dependent thrust coefficient with four meshes for Case 1 in table 1, and we observe that the thrust coefficient is converged with the decrease of minimum spacing. The time step is chosen to keep the Courant–Friedrichs–Lewy number at 0.5.
Table 3. Mesh parameters in the convergence test.


Figure 8. Comparison of the time-dependent thrust coefficient for the four meshes listed in table 3.
The maximum discrepancy of the time-averaged  $C_T$ for
$C_T$ for  $M_3$ from that for
$M_3$ from that for  $M_4$ is within
$M_4$ is within  $2\,\%$, and it is confirmed that the numerical result is independent of the mesh spacing and computational domain. Thus, we simulate the present result on mesh
$2\,\%$, and it is confirmed that the numerical result is independent of the mesh spacing and computational domain. Thus, we simulate the present result on mesh  $M_3$ with minimum spacing
$M_3$ with minimum spacing  $\Delta x=0.0125$ to balance the computational cost and spatial resolution.
$\Delta x=0.0125$ to balance the computational cost and spatial resolution.
Appendix B. Vortex-ring model
A spoon-like vortex surface can be simplified as a vortex ring with the circulation  $\varGamma$, radius
$\varGamma$, radius  $a$ and inclination angle
$a$ and inclination angle  $\beta$ to estimate forces, as shown in figure 4(c). The geometry of the simplified vortex ring is determined by the spanwise vorticity on the spanwise symmetry plane
$\beta$ to estimate forces, as shown in figure 4(c). The geometry of the simplified vortex ring is determined by the spanwise vorticity on the spanwise symmetry plane  $y=0$.
$y=0$.
Considering a particular discrete vortex surface  $V_i$ at its shedding time, the centres of two projected regions of the ring on
$V_i$ at its shedding time, the centres of two projected regions of the ring on  $y=0$ are
$y=0$ are
 \begin{equation} \boldsymbol{x}_{c1}=\frac{\displaystyle\int_{S} \omega_y \boldsymbol{x} \,\mathrm{d} S} {\displaystyle\int_{S} \omega_y \,\mathrm{d} S}\quad \textrm{for}\ \omega_y<0, \end{equation}
\begin{equation} \boldsymbol{x}_{c1}=\frac{\displaystyle\int_{S} \omega_y \boldsymbol{x} \,\mathrm{d} S} {\displaystyle\int_{S} \omega_y \,\mathrm{d} S}\quad \textrm{for}\ \omega_y<0, \end{equation}and
 \begin{equation} \boldsymbol{x}_{c2}=\frac{\displaystyle\int_{S} \omega_y \boldsymbol{x} \,\mathrm{d} S} {\displaystyle\int_{S} \omega_y \,\mathrm{d} S}\quad \textrm{for}\ \omega_y>0. \end{equation}
\begin{equation} \boldsymbol{x}_{c2}=\frac{\displaystyle\int_{S} \omega_y \boldsymbol{x} \,\mathrm{d} S} {\displaystyle\int_{S} \omega_y \,\mathrm{d} S}\quad \textrm{for}\ \omega_y>0. \end{equation}
Then,  $a$ and
$a$ and  $\beta$ are obtained by
$\beta$ are obtained by  $\boldsymbol {x}_{c1}$ and
$\boldsymbol {x}_{c1}$ and  $\boldsymbol {x}_{c2}$, and
$\boldsymbol {x}_{c2}$, and
 \begin{equation} \varGamma=\int_{S} \omega_y \,\mathrm{d} S \end{equation}
\begin{equation} \varGamma=\int_{S} \omega_y \,\mathrm{d} S \end{equation}
is calculated in the region  $S$ with
$S$ with  $\omega _y>0$. The parameters
$\omega _y>0$. The parameters  $a$,
$a$,  $\beta$ and
$\beta$ and  $\varGamma$ in the present DNS cases are listed in table 4. The time-averaged thrust coefficient
$\varGamma$ in the present DNS cases are listed in table 4. The time-averaged thrust coefficient
 \begin{equation} \bar{C}_T^{R}=\frac{I_x}{\frac{1}{2} \rho U^{2} R_{A}T_fc^2}=\frac{2{\rm \pi} a^2 \varGamma \cos \beta}{U^2 R_A T_f c^2} \end{equation}
\begin{equation} \bar{C}_T^{R}=\frac{I_x}{\frac{1}{2} \rho U^{2} R_{A}T_fc^2}=\frac{2{\rm \pi} a^2 \varGamma \cos \beta}{U^2 R_A T_f c^2} \end{equation}is calculated and listed in table 2.
Table 4. Parameters of the vortex-ring model.

Appendix C. Estimating thrust from the wake with complex vortex topology
The wake is composed of a series of discrete vortex surfaces in Cases 1–4 (see table 1), whereas it becomes convoluted with an increase of the Reynolds number, Strouhal number or plate aspect ratio. As shown in figure 9(a), vortex surfaces in the wake become partially interconnected in Case 5 with  $R_A=2$.
$R_A=2$.

Figure 9. (a) The side view of the VSF isosurface of  $\phi _v=0.8$ at
$\phi _v=0.8$ at  $t=2.25T$ in Case 5. (b) The contour of the spanwise vorticity on the spanwise symmetry plane at
$t=2.25T$ in Case 5. (b) The contour of the spanwise vorticity on the spanwise symmetry plane at  $y = 0$. Green and black lines represent parts of typical VSF isocontour lines of
$y = 0$. Green and black lines represent parts of typical VSF isocontour lines of  $\phi _v=0.2$ (solid),
$\phi _v=0.2$ (solid),  $\phi _v=0.5$ (dashed) and
$\phi _v=0.5$ (dashed) and  $\phi _v=0.8$ (dotted) in
$\phi _v=0.8$ (dotted) in  $V_4$ and
$V_4$ and  $V_5$, respectively.
$V_5$, respectively.
The shedding mechanism of vortex surfaces in Case 5 is similar to that in Case 1, but a long, chain-like structure is formed in the wake for  $R_A=2$ instead of the discrete wake structures for
$R_A=2$ instead of the discrete wake structures for  $R_A=1$, hindering the estimation of thrust based on a finite-sized vortex surface. Moreover, we reduce the empirical parameter as
$R_A=1$, hindering the estimation of thrust based on a finite-sized vortex surface. Moreover, we reduce the empirical parameter as  $\alpha _l=1$ in (2.15) in the VSF calculation of Case 5, because the VSF numerical dissipation grows with the complexity of wake structures.
$\alpha _l=1$ in (2.15) in the VSF calculation of Case 5, because the VSF numerical dissipation grows with the complexity of wake structures.
In Case 5, adjacent vortex surfaces can be partially overlapping, and are not easy to separate. Figure 9(b) shows the contour of spanwise vorticity and typical VSF isocontour lines on the spanwise symmetry plane at  $y=0$. The extracted VSF isosurface is interconnected for small
$y=0$. The extracted VSF isosurface is interconnected for small  $\phi _v$, e.g.
$\phi _v$, e.g.  $\phi _v=0.2$ in figure 9(b), and it gradually becomes discrete with increasing
$\phi _v=0.2$ in figure 9(b), and it gradually becomes discrete with increasing  $\phi _v$, e.g. for
$\phi _v$, e.g. for  $\phi _v=0.8$.
$\phi _v=0.8$.
For an isolated vortex surface, we define the vortical impulse
 \begin{equation} I^s_x(C_{\phi}) = \boldsymbol{e}_x \boldsymbol{\cdot} \tfrac{1}{2} \int_{V(\phi_v \le C_{\phi})} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
\begin{equation} I^s_x(C_{\phi}) = \boldsymbol{e}_x \boldsymbol{\cdot} \tfrac{1}{2} \int_{V(\phi_v \le C_{\phi})} \boldsymbol{x} \times \rho \boldsymbol{\omega} \,\mathrm{d} V \end{equation}
over the volume  $V(\phi _v \ge C_{\phi })$ filled with VSF isosurfaces of
$V(\phi _v \ge C_{\phi })$ filled with VSF isosurfaces of  $\phi _v \ge C_{\phi }$, where
$\phi _v \ge C_{\phi }$, where  $0 \leq C_{\phi } \leq 1$ is a constant and
$0 \leq C_{\phi } \leq 1$ is a constant and  $\boldsymbol {e}_x$ denotes the unit vector in the
$\boldsymbol {e}_x$ denotes the unit vector in the  $x$-direction. In general,
$x$-direction. In general,  $I^s_x(C_{\phi })$ and
$I^s_x(C_{\phi })$ and  $V(\phi _v \le C_{\phi })$ increase with the decrease of
$V(\phi _v \le C_{\phi })$ increase with the decrease of  $C_{\phi }$.
$C_{\phi }$.
We estimate  $I^s_x = I^s_x(C_\phi =0)$ in (4.25) from
$I^s_x = I^s_x(C_\phi =0)$ in (4.25) from  $I^s_x(C_{\phi })$ of isolated vortex surfaces, where
$I^s_x(C_{\phi })$ of isolated vortex surfaces, where  $C_{\phi }$ should be large enough, e.g.
$C_{\phi }$ should be large enough, e.g.  $C_\phi = 0.8$. For Case 5, we find a linear relation of
$C_\phi = 0.8$. For Case 5, we find a linear relation of  $I^s_x(C_{\phi })$ with
$I^s_x(C_{\phi })$ with  $C_{\phi }$ for
$C_{\phi }$ for  $C_{\phi }<0.8$ as
$C_{\phi }<0.8$ as
 \begin{equation} I^s_x(C_\phi)=I^s_x(C_\phi = 0.8) + (0.8-C_\phi) k_d, \end{equation}
\begin{equation} I^s_x(C_\phi)=I^s_x(C_\phi = 0.8) + (0.8-C_\phi) k_d, \end{equation}
where  $k_d\approx 1.02$ is the decay rate of
$k_d\approx 1.02$ is the decay rate of  $I^s_x(C_{\phi })$ with
$I^s_x(C_{\phi })$ with  $C_{\phi }$. Thus, we approximate
$C_{\phi }$. Thus, we approximate  $I^s_x$ via (C2) with
$I^s_x$ via (C2) with  $C_\phi = 0$ at
$C_\phi = 0$ at  $t=2.25T$. Then we estimate
$t=2.25T$. Then we estimate  $\bar {C}_T$ from near wake, which has
$\bar {C}_T$ from near wake, which has  $\varepsilon \approx 20\,\%$. Therefore, we provide a possible method to estimate thrust from a wake consisting of partially interconnected vortex surfaces.
$\varepsilon \approx 20\,\%$. Therefore, we provide a possible method to estimate thrust from a wake consisting of partially interconnected vortex surfaces.
For larger  $St$ or
$St$ or  $R_A$ with more convoluted vortex surfaces in the wake, we cannot simply divide the VSF isosurface into discrete ones using the segmentation algorithm with any choice of
$R_A$ with more convoluted vortex surfaces in the wake, we cannot simply divide the VSF isosurface into discrete ones using the segmentation algorithm with any choice of  $\phi _v$, e.g. in Case 6. Hence, it is difficult to estimate thrust from an isolated vortex surface in the wake via the simplified thrust formula (4.25), and we have to consider all the interconnected vortex surfaces near the plate. We find that the thrust can be estimated by (4.13) with an appropriate
$\phi _v$, e.g. in Case 6. Hence, it is difficult to estimate thrust from an isolated vortex surface in the wake via the simplified thrust formula (4.25), and we have to consider all the interconnected vortex surfaces near the plate. We find that the thrust can be estimated by (4.13) with an appropriate  $\varSigma _b$ and the relative error is approximately 12 % for Case 6. Therefore, estimating forces based on vortex surfaces in complex wake flows remains an open problem.
$\varSigma _b$ and the relative error is approximately 12 % for Case 6. Therefore, estimating forces based on vortex surfaces in complex wake flows remains an open problem.
































































