


1. INTRODUCTION
The BeiDou Navigation Satellite System (BDS) is a Chinese satellite navigation system. It consists of two separate satellite constellations – a limited test system that has been operating since 2000, and a full-scale global navigation system that is currently under construction. The second generation of the system, officially called the BeiDou Satellite Navigation System (BDS) and also known as COMPASS or BeiDou-2, will be a global satellite navigation system consisting of 35 satellites, and is under construction as of January 2013. BeiDou-2 will be a constellation of 35 satellites, which include five geostationary orbit satellites for backward compatibility with BeiDou-1, and 30 non-geostationary satellites (27 in medium earth orbit and three in inclined geosynchronous orbit), that will offer complete coverage of the globe.
With the rapid development of China's space technology, the COMPASS navigation system has completed the construction of Geostationary (GEO) satellites and Inclined Geosynchronous (IGSO) satellites. Five Medium Earth Orbit (MEO) satellites were launched on 14 April 2007, 30 April 2012 and 19 September 2012. The latest four MEO satellites were launched by way of two satellites in the same rocket. The next step is the completion of the MEO satellite constellation. 11 satellites were available before this experiment. COMPASS can already provide a positioning function in China and the neighboring area. The COMPASS signals are code division multiple access (CDMA) signals similar to those of GPS and Galileo.
China Geodetic Coordinate System 2000 (CGCS2000) is a geocentric coordinate system associated with an earth ellipsoid defined slightly differently from GRS80 (Geodetic Reference System 1980) and WGS84 (World Geodetic System 1984). CGCS2000 is referred to ITRF97 (International Terrestrial Reference Frame 1997) at the epoch of 2000.0 (Wei, Reference Wei2008; Cheng et al., Reference Cheng, Wen, Cheng and Wang2009). CGCS2000 is comparable to WGS84 and is identical to WGS84 in origin, scale, orientation and time evolution. Among the four defining parameters of the CGCS2000 ellipsoid, semi-major axis a, flattening f, Earth's gravitational constant GM and angular velocity of the Earth w, f and w are slightly different from that of WGS84. For WGS84, f is 1/298·257223563. For CGCS2000, f is 1/298·257222101. For WGS84, w is 7·2921158553E-5, for CGCS2000, w is 7·2921150E-5 (Wei, Reference Wei2008; Cheng et al., Reference Cheng, Wen, Cheng and Wang2009).
The COMPASS time reference, BeiDou System Time (BDT), is based on atomic time. Similar to GPS time, COMPASS time is a continuous time scale, which does not introduce any leap seconds. The COMPASS timing system starts from UTC 00:00:00, 1 January 2006 and is 14 seconds different to GPS time (i.e. GPST=BDT +14) (Dong et al., Reference Dong, Li and Wu2007; COMPASS satellite navigation system: signal in space interface control document, 2012).
In this research, the standalone performance of COMPASS is investigated and compared to that of GPS, including: SPP, DGPS and single epoch ambiguity resolution & positioning.
2. EXPERIMENT DATA
The experimental data were collected from two stations (Com1 and Com2) that are 10 km apart on 12 December 2012 in Shanghai Province, China. Their absolute coordinates were calculated with the precise point positioning (PPP) technique and their relative position was calculated with long period GPS observations. Both will be treated as true value and used to assess COMPASS and GPS performance. The receiver type is Compass NovAtel, which can observe signals of both GPS and COMPASS. The observed GPS measurements are dual-frequency code and phase on frequencies L1 (1575·42 MHz) and L2 (1227·60 MHz) and the observed COMPASS measurements are dual-frequency code and phase on frequencies B1 (1561·098 MHz) and B2 (1207·14 MHz).
There are four GEO satellites available in space: COMPASS C01, C03, C04 and C05 were launched on 17 January 2010, 6 June 2010, 1 November 2010 and 25 February 2012 respectively. They are located at 110°E, 80°E, 160°E and 58·75°E respectively. In addition, five IGSO satellites, COMPASS-C06, C07, C08, C09 and C10, were launched on 1 August 2010, 18 December 2010, 10 April 2011, 27 July 2011 and 2 December 2012, respectively. In this experiment, the observed MEO include: C11, C12, C13 and C14.
3. SPP PERFORMANCE
The SPP performance was tested using observations of station Com1 with the observation time from around GPS Time 3:30 to 9:00. The cutoff elevation angle was set to 15. Figure 1 shows the number and Positional Dilution of Precision (PDOP) of observed GPS satellites with the elevation angle >15. Figure 2 shows the positioning error in X, Y and Z directions.

Figure 1. Number and PDOP of observed GPS satellites (elevation >15).

Figure 2. GPS SPP positioning errors in X, Y and Z directions.
Figure 3 shows the number and PDOP of observed COMPASS satellites with the elevation angle >15. Compared to that of GPS, we found that the observed number of COMPASS satellites is generally nine or ten, and for GPS, it is generally seven or eight. As to PDOP, we found that for GPS, it is generally around 2·5, while for COMPASS it is around three. So though the number of observed COMPASS satellites is higher, the PDOP is higher. This shows that the satellite geometry of COMPASS is not as good as GPS. This is probably due to different types of COMPASS satellites being observed, including GEO, IGSO and MEO.

Figure 3. Number and PDOP of observed COMPASS satellites (elevation >15).
Figure 4 shows the COMPASS positioning error in X, Y and Z directions. Compared to that of GPS, we found that COMPASS performance is clearly worse. Table 1 gives the mean and standard deviation of positioning errors in X, Y and Z directions. The COMPASS positioning is obviously biased.

Figure 4. COMPASS SPP positioning errors in X, Y and Z directions.
Table 1. SPP positioning error of GPS and COMPASS (unit: m).
To investigate the main reason for the bad performance of COMPASS, the broadcast orbit and clock were compared to the precise one and compared to that of GPS. Figure 5 shows the broadcast orbit errors of observed COMPASS satellites and Figure 6 shows that of two sampled GPS satellites (PRN: 01 and 05). We can see that COMPASS broadcast orbit errors are clearly bigger than those of GPS, especially in X and Y directions. Figure 7 shows the broadcast satellite clock errors of COMPASS and GPS. We can see that COMPASS broadcast satellite clock errors are also obviously bigger than those of GPS.

Figure 5. COMPASS broadcast orbit error compared to precise figures.

Figure 6. GPS broadcast orbit error compared to precise figures (PRN: 01 and 05 as examples).

Figure 7. Broadcast satellite clock error compared to precise figures (COMPASS vs GPS).
4. DIFFERENTIAL POSITIONING PERFORMANCE
At the time of writing, differential COMPASS positioning is not available. To evaluate its performance, a test has been carried out as follows. As the precise coordinates of the station Com1 has been estimated with PPP technique and the satellite position at any moment can be derived from precise ephemeris which is provide by Wuhan University for COMPASS, the precise distance from the station Com1 to satellites at any observed epoch can be calculated and the corresponding corrections for any pseudorange measurements can be derived. After that, the corrections are provided to the station Com2 to correct its pseudorange measurements and then navigation performance is tested after correction. We found that the above procedure is similar to DGPS in practice. The differential positioning performance was tested from around GPS time 5:30 to 8:30.
Figure 8 shows the differential positioning error in X, Y and Z directions for COMPASS and Figure 9 shows that for GPS. Table 2 gives the mean and standard deviation of the positioning errors. From the figures and the table, we can see that the differential performance of COMPASS and GPS are similar, although GPS performs slightly better.

Figure 8. Differential performance of COMPASS.

Figure 9. DGPS performance of GPS.
Table 2. Differential GPS positioning error of GPS and COMPASS (unit: m).
5. SINGLE EPOCH AMBIGUITY RESOLUTION AND POSITIONING PERFORMANCE
The single epoch ambiguity resolution and precise positioning performance were also assessed with carrier phase measurements of both COMPASS and GPS.
The left part of Figure 10 shows the ratio value (Euler and Schaffrin, Reference Euler and Schaffrin1991; Leick, Reference Leick2004) of COMPASS when the cutoff elevation angle is set to 15. Among 1769 cases, 82·5% had a ratio greater than two and no mis-fixed case was found. As the number of observed COMPASS satellites are around nine or ten and to avoid the multipath effect of satellites with lower elevation angle, the cutoff elevation angle is set to 25 and the performance was assessed again. The ratio value is shown in the right part of Figure 10. Among 1769 cases, 97·6% had a ratio greater than two and no mis-fixed case was found.

Figure 10. COMPASS single epoch ambiguity resolution performance (elevation >15 and 25).
For comparison, the performance of GPS was also assessed and the ratio value is shown in Figure 11. When the cutoff elevation angle was set to 15, only 67·3% had a ratio greater than two. When the cutoff elevation angle is set to 25, only 16·4% had a ratio greater than two and most cannot provide a solution as not enough satellites were available. The single epoch ambiguity resolution results are summarized in Table 3. From the figures and table, we can see that, COMPASS single epoch ambiguity resolution performance is clearly better than that of GPS. The reason is mostly due to the number of observed COMPASS satellites being greater than for of GPS.
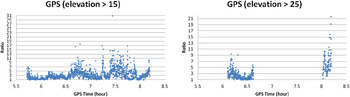
Figure 11. GPS single epoch ambiguity resolution performance (elevation >15 and 25).
Table 3. Single epoch ambiguity resolution performance of GPS and COMPASS.

Figures 12 and 13 show the positioning performance after the ambiguity is corrected, resolved when the cutoff angle is set to 15. Table 4 shows the mean and standard deviation of the positioning error. From the figures and the table, we can see that, the positioning performance is similar.

Figure 12. GPS single epoch positioning performance.

Figure 13. COMPASS single epoch positioning performance.
Table 4. Single epoch positioning error of GPS and COMPASS (unit: cm).
6. CONCLUSIONS
In this paper, the standalone performance of COMPASS and GPS with respect to Single Point Positioning (SPP), differential positioning and single epoch ambiguity resolution and positioning with a 10 km baseline have been compared. From the results, we can see that COMPASS SPP performance is clearly worse than that of GPS, due to larger broadcast orbit and satellite clock errors, especially the latter; differential positioning performance of COMPASS and GPS is similar although GPS performs slightly better; COMPASS single epoch ambiguity resolution performance is better than GPS due to more observed satellites; single epoch positioning performance of COMPASS and GPS is similar.
ACKNOWLEDGEMENT
The research was supported by the Fundamental Research Funds for the Central Universities (Grant No. 14CX02036A), funded by Hong Kong RGC General Research fund (A/C: PolyU 5131/10E) and National Natural Science Foundation of China (Grant No. 40974004).

















