


1. INTRODUCTION
The goal of most navigation systems is to estimate the six degrees of freedom to a required accuracy. The challenge of estimating each of these six will depend on the given scenario, but some common cases can be described.
For inertial navigation systems that are not in free fall, the gravity vector typically dominates the specific force measurement of the accelerometers, and thus roll and pitch are often estimated to a sufficient accuracy. Similarly, the vertical position is commonly obtained from a pressure sensor or a radar/laser altimeter (and for surface-bound vehicles such as ships and cars, it may not be needed).
The challenge of estimating the remaining three degrees of freedom, heading and horizontal position, depends greatly on two factors. For heading, the gyro accuracy determines if heading can be found with sufficient accuracy from gyrocompassing or not (given that a magnetic compass often lacks both the accuracy and reliability to fulfil the heading requirement). For horizontal position, the availability of a Global Navigation Satellite System (GNSS) will clearly be of great importance. By combining these two factors, inertial navigation systems can roughly be divided into four categories, as shown in Table 1.
Table 1. The four categories (A1, A2, B1, and B2) of inertial navigation systems, broken down by the availability of GNSS and accuracy of gyros.

The increasing availability of Microelectromechanical Systems (MEMS) Inertial Measurement Units (IMUs) has led to a significant growth in light, low-cost navigation systems. However, in most cases, today's MEMS-gyros lack the accuracy needed for gyrocompassing, and thus MEMS systems belong to Category B1 or B2 of Table 1 where heading is typically a challenge. Another trend is that GNSS-receivers have become smaller and cheaper, at the same time as GNSS other than the Global Positioning System (GPS) are becoming available. Hence, many of today's low-cost navigation systems belong to Category B1, where five degrees of freedom are often found with sufficient accuracy, while heading is the main challenge.
GNSS can be utilised in several ways to find heading, and the increased GNSS availability makes such heading methods more relevant. Similarly, heading methods that utilise a camera are increasingly attractive for low-cost applications. This is due both to the falling price of cameras and to the increased availability of low cost image processing power.
There are several different and seemingly unrelated ways to find heading, and it is not obvious how to categorise them. Dedicated instruments giving heading/orientation such as magnetic compasses, gyro compasses, star trackers, and multi-antenna GNSS are available. Heading can also be determined by specific procedures or observations, and in addition, there are several scenarios where an integrated navigation system is able to estimate heading based on other measurements and/or specific manoeuvres. In the final case, several underlying methods may be used together, where one method may be dominating the heading estimation for one period, while a second method is the only one that provides heading during another period.
A categorisation of methods to find heading would clearly be useful for the general understanding of heading estimation, and specifically for understanding the underlying methods being available for an integrated navigation system. From a categorisation, we would also achieve a list of available methods, which would be of practical use for those involved with heading estimation. Since the methods are clearly feasible in different scenarios, it is important for a navigation system designer to consider all methods that are valuable in a given scenario, but without a list, it is difficult to guarantee this.
The aim of this paper is to suggest a system to categorise the different possible ways to find heading. After the notation is introduced in Section 2, the proposed system is presented in Section 3, together with general theory for heading estimation. Based on the categorisation system, we get a list of methods, which is presented in Section 4, before Section 5 concludes the paper.
Estimated heading may be useful for different units/devices, such as vehicles, instruments, cameras etc. For simplicity, we will use the term vehicle for the unit whose heading we want to find.
2. NOTATION
The notation used is based on Gade (Reference Gade2010).
A general vector can be represented in two different ways (McGill and King, Reference McGill and King1995 or Britting, Reference Britting1971):
 $\vec x$
(Lower case letter with arrow): Coordinate free/geometrical vector (not decomposed in any coordinate frame).
$\vec x$
(Lower case letter with arrow): Coordinate free/geometrical vector (not decomposed in any coordinate frame).
 ${{\bi x}^A}$
(Bold lower case letter with right superscript): Vector decomposed/represented in a specific coordinate frame (column matrix with three scalars).
${{\bi x}^A}$
(Bold lower case letter with right superscript): Vector decomposed/represented in a specific coordinate frame (column matrix with three scalars).
A coordinate frame is defined as a combination of a point (origin), representing position, and a set of basis vectors, representing orientation. Thus, a coordinate frame has six degrees of freedom and can be used to represent the position and orientation of a rigid body. Quantities such as position, angular velocity etc., relate one coordinate frame to another. To make a quantity unique, the two frames in question are given as right subscript, as shown in Table 2.
Table 2. Symbols used to describe basic relations between two coordinate frames.

Note that in most examples in Table 2, only the position or the orientation of the frame is relevant, and the context should make it clear which of the two properties is relevant. For instance, only the orientation of a frame written as right superscript is relevant, since it denotes the frame of decomposition, where only the direction of the basis vectors matters. If both the position and the orientation of the frame are relevant, the frame is underlined to emphasise that fact.
For generality, the vectors in Table 2 are written in coordinate free form, but before implementation on a computer, they must be decomposed in a selected coordinate frame (e.g. the position vector
 ${\vec p_{AB}}$
decomposed in frame C is
${\vec p_{AB}}$
decomposed in frame C is
 ${\bi p}_{AB}^C $
).
${\bi p}_{AB}^C $
).
The A, B, and C-frames used above were just three arbitrary coordinate frames, while the frames used in the remainder of the paper will have a meaning given by Table 3.
Table 3. Coordinate frames in use.

3. HEADING ESTIMATION
This section presents theory that is common for the different methods of finding heading.
3.1. Definition of heading
Heading, sometimes called yaw or azimuth, is one of three rotational degrees of freedom, which is natural to define for land, sea, and air navigation, due to the direction of gravity. By heading, we mean the orientation about the vertical direction vector (where vertical is defined as the normal to the reference ellipsoid). The heading can be represented in several ways, e.g. as a scalar, such as in the Euler angles roll, pitch and yaw (which have singularities at certain positions/orientationsFootnote 1 ). Heading can also be represented by a rotation matrix or quaternion containing the full orientation. How the heading is represented is not important for this paper, since the discussion is valid for any representation.
3.2. Categorising methods for heading estimation
When investigating the various methods for heading estimation, it turns out that for each method, a vector is utilised to find the heading. It is also clear that different methods use different vectors, and based on this it seems sensible to define different categories of methods based on which vector is used.
Following this system, we find that there are seven different vectors in common use in practical navigation systems, and thus we define seven corresponding methods. The seven methods are presented in Section 4.
3.3. Basic principles of heading calculation
The vector used to find heading (or orientation in the general case) is denoted by
 $\vec x$
. The vector must have a known (or measurable) direction relative to the Earth (E) and for now we assume that also the length is known, such that
$\vec x$
. The vector must have a known (or measurable) direction relative to the Earth (E) and for now we assume that also the length is known, such that
 ${{\bi x}^E}$
is known. We also need to know the vector relative to the vehicle (B), i.e.
${{\bi x}^E}$
is known. We also need to know the vector relative to the vehicle (B), i.e.
 ${{\bi x}^B}$
. The relation between these vectors is
${{\bi x}^B}$
. The relation between these vectors is
 $${{\bi x}^E} = {{\bi R}_{EB}}{{\bi x}^B}$$
$${{\bi x}^E} = {{\bi R}_{EB}}{{\bi x}^B}$$
where we want to calculate
 ${{\bi R}_{EB}}$
, the vehicle orientation. Note that the length of
${{\bi R}_{EB}}$
, the vehicle orientation. Note that the length of
 $\vec x$
is not needed to find
$\vec x$
is not needed to find
 ${{\bi R}_{EB}}$
, it is sufficient to know the direction of
${{\bi R}_{EB}}$
, it is sufficient to know the direction of
 ${{\bi x}^E}$
and
${{\bi x}^E}$
and
 ${{\bi x}^B}$
(if the lengths are unknown, unit vectors can be used).
${{\bi x}^B}$
(if the lengths are unknown, unit vectors can be used).
Of the three degrees of freedom in
 ${{\bi R}_{EB}}$
, it is not possible to find the orientation about an axis parallel to
${{\bi R}_{EB}}$
, it is not possible to find the orientation about an axis parallel to
 $\vec x$
by using Equation (1), but the two remaining degrees of freedom are determined. For example, the gravity vector is known relative to E (when the position is approximately known) and for a stationary vehicle, it is measured relative to B by accelerometers. This gives roll and pitch, while heading (rotation about the gravity vectorFootnote
2
) is not found. To find the heading we thus need a vector with a non-zero horizontal component, i.e.
$\vec x$
by using Equation (1), but the two remaining degrees of freedom are determined. For example, the gravity vector is known relative to E (when the position is approximately known) and for a stationary vehicle, it is measured relative to B by accelerometers. This gives roll and pitch, while heading (rotation about the gravity vectorFootnote
2
) is not found. To find the heading we thus need a vector with a non-zero horizontal component, i.e.
 $${\vec x_{horizontal}} \ne \vec 0$$
$${\vec x_{horizontal}} \ne \vec 0$$
3.4. Accuracy of the heading calculation
In practice there will be errors in the knowledge about both
 ${{\bi x}^E}$
and
${{\bi x}^E}$
and
 ${{\bi x}^B}$
, and we can write
${{\bi x}^B}$
, and we can write
 $$\eqalign{& {\hat{\hskip -2pt \bi x}}_E^E = {{\bi x}^E} + \delta {\bi x}_E^E \cr & {\hat{\hskip -2pt \bi x}}_B^B = {{ \bi x}^B} + \delta {\bi x}_B^B} $$
$$\eqalign{& {\hat{\hskip -2pt \bi x}}_E^E = {{\bi x}^E} + \delta {\bi x}_E^E \cr & {\hat{\hskip -2pt \bi x}}_B^B = {{ \bi x}^B} + \delta {\bi x}_B^B} $$
where the hat indicates a quantity with error.
 ${{\bi x}^E}$
and
${{\bi x}^E}$
and
 ${{\bi x}^B}$
are the true vectors and the delta-terms are the error vectors. The subscript E shows that the error originates from determining
${{\bi x}^B}$
are the true vectors and the delta-terms are the error vectors. The subscript E shows that the error originates from determining
 $\vec x$
in E, and similarly for subscript B. In coordinate free form Equation (3) can be written
$\vec x$
in E, and similarly for subscript B. In coordinate free form Equation (3) can be written
 $$\eqalign{&{\hat {\vec x}}_E = \vec x + \overrightarrow {\delta {x_E}} \cr & {\hat {\vec x}}_B = \vec x + \overrightarrow {\delta {x_B}}} $$
$$\eqalign{&{\hat {\vec x}}_E = \vec x + \overrightarrow {\delta {x_E}} \cr & {\hat {\vec x}}_B = \vec x + \overrightarrow {\delta {x_B}}} $$
Note that the two error-vectors,
 $\overrightarrow {\delta {x_E}} $
and
$\overrightarrow {\delta {x_E}} $
and
 $\overrightarrow {\delta {x_B}} $
are generally not correlated, as they originate from different calculations/measurements.
$\overrightarrow {\delta {x_B}} $
are generally not correlated, as they originate from different calculations/measurements.
 $\overrightarrow {\delta {x_B}} $
is often an error from an on-board (internal) sensor, while
$\overrightarrow {\delta {x_B}} $
is often an error from an on-board (internal) sensor, while
 $\overrightarrow {\delta {x_E}} $
usually is given by error in external information. Both errors will contribute to the final heading error, but their relative importance will vary greatly between the seven methods, and this will be discussed for each method in Section 4.
$\overrightarrow {\delta {x_E}} $
usually is given by error in external information. Both errors will contribute to the final heading error, but their relative importance will vary greatly between the seven methods, and this will be discussed for each method in Section 4.
Only the components of the error-vectors that are both horizontal and normal to
 $\vec x$
will contribute to the heading error (when assuming small angular errors). If we let the operator ()contr return the length of the contributing component, we can write the standard deviation of these contributing errors
$\vec x$
will contribute to the heading error (when assuming small angular errors). If we let the operator ()contr return the length of the contributing component, we can write the standard deviation of these contributing errors
 $\sigma \left( {{{(\overrightarrow {\delta {x_E}} )}_{contr}}} \right)$
and
$\sigma \left( {{{(\overrightarrow {\delta {x_E}} )}_{contr}}} \right)$
and
 $\sigma \left( {{{(\overrightarrow {\delta {x_B}} )}_{contr}}} \right)\!$
. The standard deviation of the resulting heading error (δψ) is then given by (uncorrelated errors assumed, first order approximation)
$\sigma \left( {{{(\overrightarrow {\delta {x_B}} )}_{contr}}} \right)\!$
. The standard deviation of the resulting heading error (δψ) is then given by (uncorrelated errors assumed, first order approximation)
 $$\sigma \left( {\delta \psi} \right) \approx \displaystyle{{\sqrt {\sigma {{\left( {{{(\overrightarrow {\delta {x_E}} )}_{contr}}} \right)}^2} + \sigma {{\left( {{{(\overrightarrow {\delta {x_B}} )}_{contr}}} \right)}^2}}} \over {\left \vert {{{\vec x}_{horizontal}}} \right \vert}} $$
$$\sigma \left( {\delta \psi} \right) \approx \displaystyle{{\sqrt {\sigma {{\left( {{{(\overrightarrow {\delta {x_E}} )}_{contr}}} \right)}^2} + \sigma {{\left( {{{(\overrightarrow {\delta {x_B}} )}_{contr}}} \right)}^2}}} \over {\left \vert {{{\vec x}_{horizontal}}} \right \vert}} $$
4. THE SEVEN METHODS
The seven vectors and corresponding methods commonly used to find heading will be presented in the following subsections. An example of how the list of methods can be used to study a specific navigation system is found in Appendix A.
4.1. Method 1: The magnetic vector field of the Earth
The most basic method for finding heading is probably by means of a magnetic compass. For any position of B, the (total) magnetic vector field will give a vector
 ${\vec m_B}$
(this vector is determined by the position of B, in contrast to the kinematical vectors in Table 2 that are constructed from a relation between two coordinate frames). A magnetometer can measure the direction (relative to B) of the magnetic vector with high accuracy, thus
${\vec m_B}$
(this vector is determined by the position of B, in contrast to the kinematical vectors in Table 2 that are constructed from a relation between two coordinate frames). A magnetometer can measure the direction (relative to B) of the magnetic vector with high accuracy, thus
 ${\bi m}_B^B $
is accurately found (and the error contribution from
${\bi m}_B^B $
is accurately found (and the error contribution from
 $\overrightarrow {\delta {x_B}} $
is small). However, the magnetic vector at the position of the magnetometer will have contributions from other sources than the known (and relatively weak) magnetic field of the Earth, and in many cases there will be a large uncertainty in
$\overrightarrow {\delta {x_B}} $
is small). However, the magnetic vector at the position of the magnetometer will have contributions from other sources than the known (and relatively weak) magnetic field of the Earth, and in many cases there will be a large uncertainty in
 ${\bi m}_B^E $
(i.e. the contribution from
${\bi m}_B^E $
(i.e. the contribution from
 $\overrightarrow {\delta {x_E}} $
is significant). In addition,
$\overrightarrow {\delta {x_E}} $
is significant). In addition,
 ${\vec x_{horizontal}}$
will be short at high latitudes (far north or south).
${\vec x_{horizontal}}$
will be short at high latitudes (far north or south).
While the predictable global declination can be compensated for quite easily (e.g. by the International Geomagnetic Reference Field model (IAGA, 2010)), local deviations often limit the practical accuracy of a magnetic compass. Naturally occurring magnetic material in the ground can give deviations of tens of degrees (Leaman, Reference Leaman1997; Langley, Reference Langley2003), and similar magnitudes of error are also common in urban areas (Godha et al., Reference Godha, Petovello and Lachapelle2005). Vehicles travelling at a significant distance from the ground, e.g. in air or deep water, are far less vulnerable to these deviations, but their compass may still be degraded by other effects, such as rapid changes in the solar wind. Geomagnetic storms give greatest distortion at higher latitudes, but can sometimes also give significant errors at medium latitudes, such as a 7° change during 20 hours in Scotland (Thomson et al., Reference Thomson, McKay, Clarke and Reay2005).
Ferrous materials or electromagnetic interference from the vehicle itself may give significant errors due to the short distance to the compass. The static part of these may be corrected for by calibration procedures, but contributions from changes in the vehicle's magnetic signature (e.g. from changing electrical currents) must still be considered (Healey et al., Reference Healey, An and Marco1998). Some key properties of Method 1 are summarised in Table 4.
Table 4. Method 1 (magnetic compass), some key properties.

4.2. Method 2: The angular velocity of the Earth
The second vector to consider is the angular velocity of the Earth relative to inertial space,
 ${\vec \omega _{IE}}$
. In contrast to the previous method, the direction of this vector is very well known in E, and it defines the locations of the geographic North- and South Pole. Hence the error from
${\vec \omega _{IE}}$
. In contrast to the previous method, the direction of this vector is very well known in E, and it defines the locations of the geographic North- and South Pole. Hence the error from
 $\overrightarrow {\delta {x_E}} $
is usually negligible.
$\overrightarrow {\delta {x_E}} $
is usually negligible.
One possible way to find
 ${\bi \omega} _{IE}^B $
is by means of a camera that is detecting change in the direction to celestial objects, e.g. the apparent movement of stars is mainly given by
${\bi \omega} _{IE}^B $
is by means of a camera that is detecting change in the direction to celestial objects, e.g. the apparent movement of stars is mainly given by
 ${\vec \omega _{IE}}$
for an Earth-fixed camera. However, in practical navigation
${\vec \omega _{IE}}$
for an Earth-fixed camera. However, in practical navigation
 ${\bi \omega} _{IE}^B $
is usually measured by means of gyroscopes, and the method is thus called gyrocompassing. For the rest of this section we will assume that gyroscopes are used to find
${\bi \omega} _{IE}^B $
is usually measured by means of gyroscopes, and the method is thus called gyrocompassing. For the rest of this section we will assume that gyroscopes are used to find
 ${\bi \omega} _{IE}^B $
(usually ring laser, fibre optic or spinning mass gyros).
${\bi \omega} _{IE}^B $
(usually ring laser, fibre optic or spinning mass gyros).
The uncertainty of this method is dominated by
 $\overrightarrow {\delta {x_B}} $
, i.e. error in
$\overrightarrow {\delta {x_B}} $
, i.e. error in
 ${\bi \omega} _{IE}^B $
. The vector
${\bi \omega} _{IE}^B $
. The vector
 ${\bi \omega} _{IE}^B $
is found from the relation
${\bi \omega} _{IE}^B $
is found from the relation
 $${\bi \omega} _{IE}^B = {\bi \omega} _{IB}^B - {\bi \omega} _{EB}^B. $$
$${\bi \omega} _{IE}^B = {\bi \omega} _{IB}^B - {\bi \omega} _{EB}^B. $$
The first term (
 ${\bi \omega} _{IB}^B $
) is measured by the gyros, and for stationary scenarios (
${\bi \omega} _{IB}^B $
) is measured by the gyros, and for stationary scenarios (
 ${\vec \omega _{EB}}(t) = \vec 0\;\forall \;t$
) the gyro error is the main error source. In such scenarios, the gyro error can be averaged to improve the heading accuracy (the ideal averaging time is given by the bottom point of the Allan variance plot (Allan, Reference Allan1966) of the gyro). The constant part of the gyro error can be cancelled if the gyros can be mechanically rotated, e.g. rotating 180° about the down-axis. This can be very useful e.g. for MEMS gyros, which typically have large constant biases, and thus rotation can make gyrocompassing possible (Renkoski, Reference Renkoski2008; Iozan et al., Reference Iozan, Kirkko-Jaakkola, Collin, Takala and Rusu2010). How different carouseling schemes affect the heading accuracy is discussed in Renkoski (Reference Renkoski2008). Rotation to improve the heading accuracy can also be obtained by turning the vehicle, when feasible.
${\vec \omega _{EB}}(t) = \vec 0\;\forall \;t$
) the gyro error is the main error source. In such scenarios, the gyro error can be averaged to improve the heading accuracy (the ideal averaging time is given by the bottom point of the Allan variance plot (Allan, Reference Allan1966) of the gyro). The constant part of the gyro error can be cancelled if the gyros can be mechanically rotated, e.g. rotating 180° about the down-axis. This can be very useful e.g. for MEMS gyros, which typically have large constant biases, and thus rotation can make gyrocompassing possible (Renkoski, Reference Renkoski2008; Iozan et al., Reference Iozan, Kirkko-Jaakkola, Collin, Takala and Rusu2010). How different carouseling schemes affect the heading accuracy is discussed in Renkoski (Reference Renkoski2008). Rotation to improve the heading accuracy can also be obtained by turning the vehicle, when feasible.
For a moving vehicle, gyrocompassing is more challenging since
 ${\bi \omega} _{EB}^B $
(the second term of Equation (6)) usually has a significant uncertainty. Using a strapdown IMU and knowledge of the vehicle's velocity (
${\bi \omega} _{EB}^B $
(the second term of Equation (6)) usually has a significant uncertainty. Using a strapdown IMU and knowledge of the vehicle's velocity (
 $\vec v_{\underline{E} B}^{} $
), the heading can still be found by utilising the movement of the gravity vector relative to inertial space, as shown in Figure 1.
$\vec v_{\underline{E} B}^{} $
), the heading can still be found by utilising the movement of the gravity vector relative to inertial space, as shown in Figure 1.
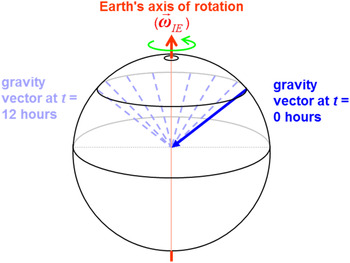
Figure 1. The gravity vector will rotate relative to the inertial space (figure assumes low/zero velocity relative to Earth).
The length of
 ${\vec x_{horizontal}}$
will obviously decrease at higher latitudes, and from geometry and Equation (5) we see that the uncertainty of Method 2 will be proportional to 1/cos(latitude), and the accuracy of marine gyrocompasses is often in the order of 0·1°/cos(latitude). In Table 5 a short (simplified) summary of Method 2 is given.
${\vec x_{horizontal}}$
will obviously decrease at higher latitudes, and from geometry and Equation (5) we see that the uncertainty of Method 2 will be proportional to 1/cos(latitude), and the accuracy of marine gyrocompasses is often in the order of 0·1°/cos(latitude). In Table 5 a short (simplified) summary of Method 2 is given.
Table 5. Method 2 (gyrocompassing), some key properties.

4.3. Method 3: Vector between external objects
In the third method, heading is obtained by observing at least two objects (O1 and O2), that form a vector
 ${\vec p_{{O_1}{O_2}}}$
. If the global positions of the two objects are known, the vector is known in E,
${\vec p_{{O_1}{O_2}}}$
. If the global positions of the two objects are known, the vector is known in E,
 ${\bi p}_{{O_1}{O_2}}^E $
. Finding the direction of
${\bi p}_{{O_1}{O_2}}^E $
. Finding the direction of
 ${\bi p}_{{O_1}{O_2}}^B $
may be done with a camera (with known orientation relative to the vehicle), e.g. a downward-looking camera in an Unmanned Aerial Vehicle (UAV) recognising O1 and O2. A feature with a known direction, such as a building or a road, may also be recognised and used, but here we simply consider it to consist of one or more vectors known in E. The sensor does not need to be a camera; the principle can also be used by other imaging sensors such as a sonar (Lucido et al., Reference Lucido, Pesquet-Popescu, Opderbecke, Rigaud, Deriche, Zhang, Costa and Larzabal1998).
${\bi p}_{{O_1}{O_2}}^B $
may be done with a camera (with known orientation relative to the vehicle), e.g. a downward-looking camera in an Unmanned Aerial Vehicle (UAV) recognising O1 and O2. A feature with a known direction, such as a building or a road, may also be recognised and used, but here we simply consider it to consist of one or more vectors known in E. The sensor does not need to be a camera; the principle can also be used by other imaging sensors such as a sonar (Lucido et al., Reference Lucido, Pesquet-Popescu, Opderbecke, Rigaud, Deriche, Zhang, Costa and Larzabal1998).
To find heading,
 ${\vec p_{{O_1}{O_2}}}$
must obviously have a horizontal component, but the direction of observation does not need to be vertical. Consider the concept of leading lights (range lights) for ships, i.e. one low and one high lighthouse that are vertically aligned when the ship is positioned at the correct bearing. In this case
${\vec p_{{O_1}{O_2}}}$
must obviously have a horizontal component, but the direction of observation does not need to be vertical. Consider the concept of leading lights (range lights) for ships, i.e. one low and one high lighthouse that are vertically aligned when the ship is positioned at the correct bearing. In this case
 ${\vec p_{{O_1}{O_2}}}$
points directly towards (or away from) the ship, and the direction of
${\vec p_{{O_1}{O_2}}}$
points directly towards (or away from) the ship, and the direction of
 ${\bi p}_{{O_1}{O_2}}^B $
is easily found e.g. by means of an alidade or a camera.
${\bi p}_{{O_1}{O_2}}^B $
is easily found e.g. by means of an alidade or a camera.
This method can also be used with celestial objects, such as the stars, where the direction of
 ${\bi p}_{{O_1}{O_2}}^E $
will be known when time is known. Star trackers are commonly used to determine the orientation of spacecraft, but can also be used from the surface of Earth (Samaan et al., Reference Samaan, Mortari and Junkins2008).
${\bi p}_{{O_1}{O_2}}^E $
will be known when time is known. Star trackers are commonly used to determine the orientation of spacecraft, but can also be used from the surface of Earth (Samaan et al., Reference Samaan, Mortari and Junkins2008).
For Method 3, a high heading accuracy can be obtained from one pair of objects, and with more than two objects, the accuracy will improve further. An example of star tracker accuracy is 0·02° (around boresight, Dzamba et al., Reference Dzamba, Enright, Sinclair, Amankwah, Votel, Jovanovic and McVittie2014). The method is summarised in Table 6.
Table 6. Method 3 (vector between external objects), some key properties.

4.4. Method 4: Vector from own vehicle to external object
Methods 1 to 3 may work without knowing the vehicle's own position, but for the rest of the methods, knowledge about vehicle position (or change in position) is needed for the heading calculation. The first of these methods is related to Method 3, but with the knowledge of vehicle (B) position, only one external object O is needed, i.e. we use the vector
 $\vec p_{BO}^{} $
. When we also know the position of O,
$\vec p_{BO}^{} $
. When we also know the position of O,
 ${\bi p}_{BO}^E $
is found. The direction of the horizontal part of
${\bi p}_{BO}^E $
is found. The direction of the horizontal part of
 $\vec p_{BO}^{} $
relative to the vehicle's orientation is often called the bearing of the object, and when the bearing is measured, we have the needed part of
$\vec p_{BO}^{} $
relative to the vehicle's orientation is often called the bearing of the object, and when the bearing is measured, we have the needed part of
 ${\bi p}_{BO}^B $
.
${\bi p}_{BO}^B $
.
To measure the bearing in practice, a camera may be used, recognising an object in the picture. There are also other possibilities, e.g. a radio transmitter with a known position can be used as the object, if bearing can be measured by the receiving antenna. Underwater, hydrophones can measure the bearing to an acoustic transmitter or a river outlet with known position.
The object used does not need to be Earth-fixed, as long as the position of the object is known, such that we can determine the direction of
 ${\bi p}_{BO}^E $
. A relevant example is when a second vehicle is travelling close enough to be observed, and the position of that vehicle can be received through a communication channel. A similar situation (that is most relevant on land) is when a GNSS receiver is placed in an observable position, a procedure that is used e.g. to determine the heading of instruments for land surveying (Leica Geosystems, 2008) and for aiming (Rockwell Collins, 2015).
${\bi p}_{BO}^E $
. A relevant example is when a second vehicle is travelling close enough to be observed, and the position of that vehicle can be received through a communication channel. A similar situation (that is most relevant on land) is when a GNSS receiver is placed in an observable position, a procedure that is used e.g. to determine the heading of instruments for land surveying (Leica Geosystems, 2008) and for aiming (Rockwell Collins, 2015).
Celestial objects usually have a known position relative to Earth when time is known, and are thus suitable for Method 4, e.g. the direction to the Sun or a satellite transmitting radio signals can be used to find the heading when own position is known (unless when directly above, where
 ${\vec x_{horizontal}} = \vec 0$
). An example where heading is estimated with an accuracy of about 1° by means of the Sun is found in Lalonde et al. (Reference Lalonde, Narasimhan and Efros2010).
${\vec x_{horizontal}} = \vec 0$
). An example where heading is estimated with an accuracy of about 1° by means of the Sun is found in Lalonde et al. (Reference Lalonde, Narasimhan and Efros2010).
If three or more different objects (with different horizontal bearings) are available for observation, horizontal position of B can first be calculated (the “Snellius-Pothenot Surveying Problem” (Dorrie, Reference Dorrie1965)), and subsequently any of the objects can be used to find the heading (using
 $\vec p_{BO}^{} $
). Some key properties of Method 4 are summarised in Table 7.
$\vec p_{BO}^{} $
). Some key properties of Method 4 are summarised in Table 7.
Table 7. Method 4 (vector from vehicle to object), some key properties.

4.5. Method 5: Body-fixed vector
The two previous methods were using
 ${\vec p_{{O_1}{O_2}}}$
and
${\vec p_{{O_1}{O_2}}}$
and
 $\vec p_{BO}^{} $
, and thus it is now natural to look at the vector
$\vec p_{BO}^{} $
, and thus it is now natural to look at the vector
 ${\vec p_{{B_1}{B_2}}}$
, i.e. using two separate positions B
1
and B
2
on the vehicle. If we can measure the position of both B
1
and B
2
e.g. from two GNSS receivers or other means,
${\vec p_{{B_1}{B_2}}}$
, i.e. using two separate positions B
1
and B
2
on the vehicle. If we can measure the position of both B
1
and B
2
e.g. from two GNSS receivers or other means,
 ${\bi p}_{{B_1}{B_2}}^E $
is found.
${\bi p}_{{B_1}{B_2}}^E $
is found.
 ${\bi p}_{{B_1}{B_2}}^B $
is typically known from the mounting (and it is constant when assuming a rigid body).
${\bi p}_{{B_1}{B_2}}^B $
is typically known from the mounting (and it is constant when assuming a rigid body).
In the example of two GNSS-receivers, heading can be found with two independent receivers if the baseline (
 ${\vec x_{horizontal}}$
) is sufficiently large. However,
${\vec x_{horizontal}}$
) is sufficiently large. However,
 ${\bi p}_{{B_1}{B_2}}^E $
can be found much more accurately (allowing a shorter baseline), by utilising the phase difference of the GNSS carrier signal at two (or more) antennae (resolving the integer ambiguities). An accuracy of about 0·3° can be achieved with a baseline of 0·5 m (Hemisphere GNSS, 2015).
${\bi p}_{{B_1}{B_2}}^E $
can be found much more accurately (allowing a shorter baseline), by utilising the phase difference of the GNSS carrier signal at two (or more) antennae (resolving the integer ambiguities). An accuracy of about 0·3° can be achieved with a baseline of 0·5 m (Hemisphere GNSS, 2015).
The
 ${\vec p_{{B_1}{B_2}}}$
-method can also be used without GNSS, consider e.g. an upward looking camera at ground level with known orientation, observing both B
1
and B
2
(e.g. two recognisable lights) at a vehicle flying above the camera. A similar example is given in Hauschild et al. (Reference Hauschild, Steigenberger and Rodriguez-Solano2012) where the heading of a satellite, which has two transmitting antennae with a baseline of 1·3 m, was estimated. Ground stations can measure the phase difference of the waves from the two antennae, and can thus estimate the direction of
${\vec p_{{B_1}{B_2}}}$
-method can also be used without GNSS, consider e.g. an upward looking camera at ground level with known orientation, observing both B
1
and B
2
(e.g. two recognisable lights) at a vehicle flying above the camera. A similar example is given in Hauschild et al. (Reference Hauschild, Steigenberger and Rodriguez-Solano2012) where the heading of a satellite, which has two transmitting antennae with a baseline of 1·3 m, was estimated. Ground stations can measure the phase difference of the waves from the two antennae, and can thus estimate the direction of
 ${\bi p}_{{B_1}{B_2}}^E $
.
${\bi p}_{{B_1}{B_2}}^E $
.
For Method 5,
 $\overrightarrow {\delta {x_B}} $
is usually found accurately by measurements of the installed B
1
and B
2
at the vehicle, and if the vehicle is sufficiently rigid, this error will be small.
$\overrightarrow {\delta {x_B}} $
is usually found accurately by measurements of the installed B
1
and B
2
at the vehicle, and if the vehicle is sufficiently rigid, this error will be small.
 $\overrightarrow {\delta {x_E}} $
will typically be larger, but a long baseline can make the resulting heading error very small, giving the method a high potential accuracy. A short summary of Method 5 is given in Table 8.
$\overrightarrow {\delta {x_E}} $
will typically be larger, but a long baseline can make the resulting heading error very small, giving the method a high potential accuracy. A short summary of Method 5 is given in Table 8.
Table 8. Method 5 (multi-antenna GNSS/body-fixed vector), some key properties.

4.6. Method 6: Vehicle velocity vector
So far, the methods have been independent of own movement, but if the vehicle has a horizontal velocity component, the velocity vector
 ${\vec v_{\underline{E} B}}$
can also be used to find heading.
${\vec v_{\underline{E} B}}$
can also be used to find heading.
Finding
 ${\bi v}_{\underline{E} B}^B $
can be done in several ways, where one option is using a Doppler sensor, such as an underwater acoustic Doppler velocity log or a Doppler radar. One or more cameras can also be used, where the optical flow of Earth-fixed features is tracked (Zinner et al., Reference Zinner, Schmidt and Wolf1989; Sivalingam and Hagen, Reference Sivalingam and Hagen2012). Sensors that measure velocity relative to water or air may also be used if sea current or wind is known (or small relative to
${\bi v}_{\underline{E} B}^B $
can be done in several ways, where one option is using a Doppler sensor, such as an underwater acoustic Doppler velocity log or a Doppler radar. One or more cameras can also be used, where the optical flow of Earth-fixed features is tracked (Zinner et al., Reference Zinner, Schmidt and Wolf1989; Sivalingam and Hagen, Reference Sivalingam and Hagen2012). Sensors that measure velocity relative to water or air may also be used if sea current or wind is known (or small relative to
 ${\vec v_{\underline{E} B}}$
). Finally,
${\vec v_{\underline{E} B}}$
). Finally,
 ${\bi v}_{\underline{E} B}^B $
can also be found from knowledge of the vehicle movement, e.g. a vehicle on rails or wheels may have a restricted movement such that
${\bi v}_{\underline{E} B}^B $
can also be found from knowledge of the vehicle movement, e.g. a vehicle on rails or wheels may have a restricted movement such that
 $${\bi v}_{\underline{E} B}^B \approx \left[ {\matrix{ x \cr 0 \cr 0 \cr}} \right]\comma$$
$${\bi v}_{\underline{E} B}^B \approx \left[ {\matrix{ x \cr 0 \cr 0 \cr}} \right]\comma$$
where x is the forward speed (and hence the course equals the heading). For vehicles in air/water, an aerodynamic/hydrodynamic model may be used to calculate velocity relative to the surrounding air/water.
For Method 6 to work, we also need
 ${\bi v}_{\underline{E} B}^E $
, which can be obtained from GNSS (utilising Doppler shift or carrier phase (van Graas and Soloviev, Reference van Graas and Soloviev2004). If position measurements (
${\bi v}_{\underline{E} B}^E $
, which can be obtained from GNSS (utilising Doppler shift or carrier phase (van Graas and Soloviev, Reference van Graas and Soloviev2004). If position measurements (
 ${\bi p}_{EB}^E $
) are available,
${\bi p}_{EB}^E $
) are available,
 ${\bi v}_{\underline{E} B}^E $
can in theory be found by direct differentiation. In practice, a correctly designed integrated navigation system will use Method 6 to estimate heading when position measurements and
${\bi v}_{\underline{E} B}^E $
can in theory be found by direct differentiation. In practice, a correctly designed integrated navigation system will use Method 6 to estimate heading when position measurements and
 ${\bi v}_{\underline{E} B}^B $
are available. An example is the navigation system of the HUGIN Autonomous Underwater Vehicle (AUV), where Method 6 is necessary to find heading with the required accuracy for vehicles that are not equipped with high-accuracy gyros (Gade and Jalving, Reference Gade and Jalving1998). The method gives a heading accuracy of about 0·5° when
${\bi v}_{\underline{E} B}^B $
are available. An example is the navigation system of the HUGIN Autonomous Underwater Vehicle (AUV), where Method 6 is necessary to find heading with the required accuracy for vehicles that are not equipped with high-accuracy gyros (Gade and Jalving, Reference Gade and Jalving1998). The method gives a heading accuracy of about 0·5° when
 ${\bi p}_{EB}^E $
is regularly transmitted to the AUV from a surface ship (that has found
${\bi p}_{EB}^E $
is regularly transmitted to the AUV from a surface ship (that has found
 ${\bi p}_{EB}^E $
by combining acoustic relative positioning and GNSS), since the AUV has a Doppler velocity log and under normal operation has a horizontal velocity component.
${\bi p}_{EB}^E $
by combining acoustic relative positioning and GNSS), since the AUV has a Doppler velocity log and under normal operation has a horizontal velocity component.
The accuracy of method 6 will clearly increase with higher horizontal speed, while the two errors
 $\overrightarrow {\delta {x_E}} $
and
$\overrightarrow {\delta {x_E}} $
and
 $\overrightarrow {\delta {x_B}} $
typically will originate from two different sensors, and which of them is dominating will depend on the given scenario. Some key properties of Method 6 are summarised in Table 9.
$\overrightarrow {\delta {x_B}} $
typically will originate from two different sensors, and which of them is dominating will depend on the given scenario. Some key properties of Method 6 are summarised in Table 9.
Table 9. Method 6 (velocity vector), some key properties.

4.7. Method 7: Vehicle acceleration vector
Method 6 required a sensor measuring
 ${\bi v}_{\underline{E} B}^B $
(or sufficient knowledge about this vector), which for many navigation systems will not be available. However, almost every navigation system will have accelerometers, and thus we can instead find the vector
${\bi v}_{\underline{E} B}^B $
(or sufficient knowledge about this vector), which for many navigation systems will not be available. However, almost every navigation system will have accelerometers, and thus we can instead find the vector
 ${\bi a}_{\underline{E} B}^B $
(after subtracting the contribution from the gravity and Coriolis force). Hence, if the vehicle has a horizontal acceleration component,
${\bi a}_{\underline{E} B}^B $
(after subtracting the contribution from the gravity and Coriolis force). Hence, if the vehicle has a horizontal acceleration component,
 ${\vec a_{\underline{E} B}}$
can be used to find heading. Obtaining
${\vec a_{\underline{E} B}}$
can be used to find heading. Obtaining
 ${\bi a}_{\underline{E} B}^E $
can be done similarly as in Method 6, i.e. by getting measurements of
${\bi a}_{\underline{E} B}^E $
can be done similarly as in Method 6, i.e. by getting measurements of
 ${\bi v}_{\underline{E} B}^E $
or
${\bi v}_{\underline{E} B}^E $
or
 ${\bi p}_{EB}^E $
, typically from GNSS.
${\bi p}_{EB}^E $
, typically from GNSS.
FFI has investigated the accuracy of this method when using MEMS IMUs, by comparing the heading calculated from Method 7 with the heading from two rigidly attached references. The first reference is Honeywell HG9900 IMU (gyro biases of only 0·003°/h), from which the estimator in the navigation software NavLab (Gade, Reference Gade2005) will find heading accurately using Method 2. The second reference is a camera, where heading is found by Method 4 each time a picture is taken, as shown in Figure 2.

Figure 2. Verifying Method 7 by Method 4, from helicopter. NavLab has calculated the orientation and position of the camera when the picture was taken, giving a direction vector. The position where the direction vector intersects an available terrain model is compared with the centre of the picture taken.
In a helicopter doing turns,
 ${\vec a_{\underline{E} B}}$
is large, and heading is found accurately from Method 7. By using Sensonor STIM300 IMU and GPS position aiding, NavLab (with smoothing) obtained a heading accuracy of 0·16° (1σ). This accuracy was found by measuring the deviation in 26 pictures (and it is in accordance with both the deviation from the HG9900-reference and the theoretical uncertainty reported by the NavLab estimator).
${\vec a_{\underline{E} B}}$
is large, and heading is found accurately from Method 7. By using Sensonor STIM300 IMU and GPS position aiding, NavLab (with smoothing) obtained a heading accuracy of 0·16° (1σ). This accuracy was found by measuring the deviation in 26 pictures (and it is in accordance with both the deviation from the HG9900-reference and the theoretical uncertainty reported by the NavLab estimator).
A lower acceleration will obviously reduce the accuracy (due to shorter
 ${\vec x_{horizontal}}$
), but by aiding NavLab with
${\vec x_{horizontal}}$
), but by aiding NavLab with
 ${\bi v}_{\underline{E} B}^E $
instead of
${\bi v}_{\underline{E} B}^E $
instead of
 ${\bi p}_{EB}^E $
, less acceleration, with shorter duration is needed to find heading. This is because the integrated acceleration can be distinguished more quickly from the noise in
${\bi p}_{EB}^E $
, less acceleration, with shorter duration is needed to find heading. This is because the integrated acceleration can be distinguished more quickly from the noise in
 ${\bi v}_{\underline{E} B}^E $
than that in
${\bi v}_{\underline{E} B}^E $
than that in
 ${\bi p}_{EB}^E $
, since the latter requires a second integration.
${\bi p}_{EB}^E $
, since the latter requires a second integration.
FFI has looked at the accuracy available from Method 7 in a car, and Figure 3 shows the result from a test where
 ${\bi a}_{\underline{E} B}^E $
is found from
${\bi a}_{\underline{E} B}^E $
is found from
 ${\bi p}_{EB}^E $
and from two variants of
${\bi p}_{EB}^E $
and from two variants of
 ${\bi v}_{\underline{E} B}^E $
.
${\bi v}_{\underline{E} B}^E $
.

Figure 3. The heading accuracy from Method 7 in the car test varied with acceleration and with different methods to find
 ${\bi a}_{\underline{E} B}^E $
. The car had a stationary period before driving on smaller roads, and then a period on a highway, before driving back the same way. The three graphs show theoretical uncertainty in smoothed heading when NavLab is aided with GPS position (
${\bi a}_{\underline{E} B}^E $
. The car had a stationary period before driving on smaller roads, and then a period on a highway, before driving back the same way. The three graphs show theoretical uncertainty in smoothed heading when NavLab is aided with GPS position (
 ${\bi p}_{EB}^E $
) or GPS velocity (
${\bi p}_{EB}^E $
) or GPS velocity (
 ${\bi v}_{\underline{E} B}^E $
) from Doppler shift or carrier phase. Only the uncertainty with GPS position aiding is verified with an external heading reference, the two others are simulated with accuracies based on u-blox (2015) and van Graas and Soloviev (Reference van Graas and Soloviev2004).
${\bi v}_{\underline{E} B}^E $
) from Doppler shift or carrier phase. Only the uncertainty with GPS position aiding is verified with an external heading reference, the two others are simulated with accuracies based on u-blox (2015) and van Graas and Soloviev (Reference van Graas and Soloviev2004).
Method 7 is summarised in Table 10.
Table 10. Method 7 (acceleration vector), some key properties.

4.8. Other methods
Seven different vectors that are all widely used to find heading have been presented. However, given all the different applications around the globe that find orientation, we cannot guarantee that all methods in use are covered among the seven, but we think the most important ones are included. Appendix B will briefly discuss some possible methods not covered by the seven, but to our knowledge, they are in little or no use in practical navigation.
5. CONCLUSIONS
There are several different techniques in use for heading estimation in various applications, and it may be difficult to get an overview and see how they relate to each other. However, by studying the vector utilised to find the heading, different heading estimation methods can be defined based on which vector is in use. This categorisation has given seven different methods to find heading that are all in common use. Figure 4 shows a simplified summary of these for quick reference.

Figure 4. A simplified summary of the seven methods, and some key features/examples of each method.
For Method 2 it takes time to find the initial heading, while for the other six methods it is in many cases possible to find heading almost instantly. We have found the list of the available methods to be very useful when designing navigation systems, in particular those belonging to Category B1 or B2 of Table 1. The list helps to ensure that all feasible methods are considered for a given scenario and it works as a common reference in discussions about heading estimation. Since the theory is quite fundamental, it has also turned out to be valuable for teaching.
ACKNOWLEDGEMENTS
The author is grateful for all feedback and suggested improvements of this paper received from researchers, professors, and engineers at FFI, the Norwegian University of Science and Technology (NTNU), the University Graduate Centre (UNIK), and Kongsberg Maritime.
APPENDIX A: STUDYING HEADING USING THE LIST OF METHODS – AN EXAMPLE
The list of methods can be used to study how to find the heading of a given vehicle, and this can be illustrated by a simple example. Consider a wheeled vehicle with MEMS IMU, GPS, and camera (belonging to Category B1 of Table 1). If we consider the feasibility of each heading method for this vehicle, the result may look like this:
-
Method 1: No; too much electromagnetic interference from the vehicle
Method 2: No; accurate gyros unavailable (too expensive for this application)
Method 3: No; multiple external recognisable objects in general not visible at the same time
Method 4: Sometimes; can be used when a recognisable object, such as another vehicle with known position, can be seen by the camera
Method 5: No; not enough space for the navigation unit to get the required baseline
Method 6: Yes; wheel-slip is common, i.e. Equation (7) cannot be assumed, however
 ${\bi v}_{\underline{E} B}^B $
can be found from the camera
${\bi v}_{\underline{E} B}^B $
can be found from the cameraMethod 7: Yes

Thus, this vehicle can sometimes find heading from Method 4, and when in movement Method 6 and 7 can be used. An integrated navigation system will utilise both Method 6 and 7 at the same time, and when the vehicle velocity is high, and there is no or low acceleration, Method 6 will contribute the most (due to the
 $\left\vert {{{\vec x}_{horizontal}}} \right\vert$
-term of Equation (5)).
$\left\vert {{{\vec x}_{horizontal}}} \right\vert$
-term of Equation (5)).
APPENDIX B: OTHER METHODS TO FIND HEADING
When looking for other possible methods, we can use the seven methods as a basis.
A.1. Vector fields with known direction relative to the Earth
Looking at Method 1 (magnetic vector field), it is natural to ask if other Earth-fixed vector fields can be utilised. E.g., the gravity vector has a small horizontal component (deflection) at some locations due to non-homogenous mass distribution, but it is probably too small to be of practical use in heading estimation.
If the horizontal gradient of a scalar field, such as temperature or particle concentration (in air or water) is known in E, heading could be found from distributed scalar sensors (in a similar manner as a snake can detect the particle gradient with its forked tongue).
Another example is wind or sea current, whose direction can be found accurately relative to the vehicle (B) for several applications, i.e.
 $\overrightarrow {\delta {x_B}} $
is small. However, for both this and the previous examples, the direction in E is usually not known with sufficient accuracy to make the vector useful to find heading in practical navigation.
$\overrightarrow {\delta {x_B}} $
is small. However, for both this and the previous examples, the direction in E is usually not known with sufficient accuracy to make the vector useful to find heading in practical navigation.
Man-made vector fields (with a known direction in E) may be in use for heading estimation in some applications, but to our knowledge, such applications are not common.
A.2. Methods 2-5
The use of
 ${\vec \omega _{IE}}$
(Method 2) is possible since E is a non-inertial frame, but there are probably no other non-inertial features of the Earth that can be used to find heading.
${\vec \omega _{IE}}$
(Method 2) is possible since E is a non-inertial frame, but there are probably no other non-inertial features of the Earth that can be used to find heading.
The three next methods related to positions of objects (Methods 3–5) utilise all the three possible combinations of external objects and sensors mounted on the vehicle, and thus it is difficult to see how to extend this list.
A.3. Methods utilising vehicle motion
Methods 6 and 7 can be naturally extended to the use of the jerk vector (the derivative of acceleration). However, the jerk vector changes quickly for most vehicles, and it is difficult to find in E. In practice, a system that would be able to find heading from the jerk vector would probably find heading with much higher accuracy from the acceleration vector (Method 7).
For a rotating vehicle, the vector
 ${\vec \omega _{EB}}$
can be used to find heading. e.g. for a spinning vehicle with simple gyros,
${\vec \omega _{EB}}$
can be used to find heading. e.g. for a spinning vehicle with simple gyros,
 ${\bi \omega} _{EB}^B $
would be measured (Earth rotation is below the noise level). One or more Earth-fixed cameras filming the vehicle could calculate
${\bi \omega} _{EB}^B $
would be measured (Earth rotation is below the noise level). One or more Earth-fixed cameras filming the vehicle could calculate
 ${\bi \omega} _{EB}^E $
from the rotating movement of the pattern on the vehicle's surface and hence heading can be found. If such cameras were available, in most cases it would probably be better to paint recognisable markers on the vehicle and find its heading with Method 5, avoiding the need for gyros and the need for rotation.
${\bi \omega} _{EB}^E $
from the rotating movement of the pattern on the vehicle's surface and hence heading can be found. If such cameras were available, in most cases it would probably be better to paint recognisable markers on the vehicle and find its heading with Method 5, avoiding the need for gyros and the need for rotation.
For practical applications, we are not aware of vehicles that use
 ${\vec \omega _{EB}}$
or its derivatives to find heading.
${\vec \omega _{EB}}$
or its derivatives to find heading.














