




1. Introduction
Fast magnetically driven implosions of axisymmetric plasma columns and metal liners are essential for many applications of high-energy-density physics (HEDP) and inertial confinement fusion (ICF). To generate high x-ray and neutron yields, Z-pinch implosions are used; see Pereira & Davis (Reference Pereira and Davis1988), Giuliani & Commisso (Reference Giuliani and Commisso2015), Jones et al. (Reference Jones2006), Coverdale et al. (Reference Coverdale2007), Ampleford et al. (Reference Ampleford2014), Sinars et al. (Reference Sinars2020) and references therein. The implosion of a thin metal liner compressing a laser-preheated plasma is the critical component of the magnetized liner inertial confinement fusion (MagLIF) approach to the ICF; see Slutz et al. (Reference Slutz, Herrmann, Vesey, Sefkow, Sinars, Rovang, Peterson and Cuneo2010), Slutz & Vesey (Reference Slutz and Vesey2012), Cuneo et al. (Reference Cuneo2012) and Gomez et al. (Reference Gomez2020). The plasma and metal loads are imploded by the azimuthal magnetic field of the axial current passed through the load. In many cases, an external axial magnetic field is applied to stabilize the implosion or provide the ‘magneto-thermo-insulation’ (Lindemuth & Kirkpatrick Reference Lindemuth and Kirkpatrick1983) of the stagnated plasma, which is the critical issue for all approaches to magnetized target fusion and magneto-inertial fusion (Turchi Reference Turchi2008; Garanin Reference Garanin2013; Wurden et al. Reference Wurden2016; Lindemuth Reference Lindemuth2017), including the MagLIF. The axial magnetic field, in turn, can affect the implosion dynamics in various ways, not all of which are fully understood; see Felber et al. (Reference Felber, Malley, Wessel, Matzen, Palmer, Spielman, Liberman and Velikovich1988), Shishlov et al. (Reference Shishlov2006), Rousskikh et al. (Reference Rousskikh, Zhigalin, Oreshkin and Baksht2017), Mikitchuk et al. (Reference Mikitchuk2019), Conti et al. (Reference Conti, Aybar, Narkis, Valenzuela, Rahman, Ruskov, Dutra, Haque, Covington and Beg2020), Seyler (Reference Seyler2020) and references therein. Recent experiments with gas-puff Z-pinch implosions in an external magnetic field (Cvejić et al. Reference Cvejić2022) demonstrated a self-generated rotation of the imploding axisymmetric plasma. The LINUS project pursued at Naval Research Laboratory (NRL) since the early 1970s, the earliest approach to magnetized target fusion (see Robson Reference Robson1973; Turchi et al. Reference Turchi, Cooper, Ford, Jenkins and Burton1980 and references therein) involved both magnetic flux compression of the fusion plasma and rotation of the liner compressing it. Here, the rotation stabilized the liner implosion against the Rayleigh–Taylor instability by reversing the effective gravity at its inner surface. The papers by Book & Winsor (Reference Book and Winsor1974), Barcilon, Book & Cooper (Reference Barcilon, Book and Cooper1974) and Book & Turchi (Reference Book and Turchi1979) predicted the stabilization theoretically, and Turchi et al. (Reference Turchi, Cooper, Ford and Jenkins1976, Reference Turchi, Cooper, Ford, Jenkins and Burton1980) demonstrated it experimentally. A modified version of this approach is presently pursued by General Fusion; see Huneault, Plant & Higgins (Reference Huneault, Plant and Higgins2019) and references therein. The studies of the 1970s revealed that compressibility of the rotating liquid liner and formation of shock waves in it are not negligible; see the discussion by Book & Turchi (Reference Book and Turchi1979). They are more relevant and can become dominant if the compressed rotating magnetized fluid is a low-density plasma, as in Z-pinch implosions. A prominent feature of fast Z-pinches is the thermalization of the imploding plasma's kinetic energy at stagnation near the axis via an expanding accretion shock wave. The kinetic-to-thermal energy conversion in an expanding cylindrical shock wave plays a significant, maybe dominant role in the keV x-ray radiation production in both gas-puff and wire-array Z-pinches (Basko et al. Reference Basko, Sasorov, Murakami, Novikov and Grushin2012; Maron et al. Reference Maron2013). The radial flow of the low-density, cold plasma ablated from the wires in cylindrical wire-array Z-pinch implosions stagnates via an expanding shock wave into a precursor plasma column. This process strongly affects the dynamics and stability of wire-array implosions; see Lebedev et al. (Reference Lebedev, Beg, Bland, Chittenden, Dangor, Haines, Kwek, Pikuz and Shelkovenko2001), Bott et al. (Reference Bott2009) and references therein.
A detailed description of the supersonic stagnation process, even for the one-dimensional (1-D) axisymmetric case, requires magnetohydrodynamic (MHD) numerical simulation. It would be helpful to gain insight into the dynamics and stability of the implosion and stagnation and to enable verification of the codes used for this purpose by developing exact analytical or semi-analytical solutions. To do this, we can use the Lie symmetries of the governing non-stationary ideal-MHD equations (Ovsiannikov Reference Ovsiannikov1982; Galas Reference Galas1993), reducing them to ordinary differential equations and constructing their exact self-similar solutions. The presence of the magnetic field significantly constrains the MHD families of self-similar solutions compared with their counterparts in compressible gas dynamics. Well-known examples of exact gas-dynamic solutions describing supersonic stagnation are the solution of collapsing-shock or collapsing-cavity problems (Guderley Reference Guderley1942; Hunter Reference Hunter1960) extended to the post-collapse reflected-shock stage (Stanyukovich Reference Stanyukovich1960; Lazarus Reference Lazarus1981; Zel'dovich & Raizer Reference Zel'dovich and Raizer2002). Axisymmetric MHD solutions of this kind with an azimuthal magnetic field are harder to construct. They typically involve singular features, such as a time-dependent line current on axis (Liberman & Velikovich Reference Liberman and Velikovich1986; Venkatesan & Choe Reference Venkatesan and Choe1992; Lock & Mestel Reference Lock and Mestel2008). Finding semi-analytic solutions suitable for comparison to direct numerical simulations, often requires going beyond self-similarity, using, for example, the extension of the geometric shock dynamics approximation (Whitham Reference Whitham2011) as done by Pullin et al. (Reference Pullin, Mostert, Wheatley and Samtaney2014) and Mostert et al. (Reference Mostert, Pullin, Samtaney and Wheatley2016). For the situations when exact self-similar solutions can be constructed, they do not appear suitable for code verification: ‘Numerical calculations stubbornly refuse to exhibit attraction to a self-similar asymptotic state’, as noted by Lock & Mestel (Reference Lock and Mestel2008). Nevertheless, it is possible to describe a supersonic axisymmetric stagnation of magnetically driven imploding mass by exact self-similar solutions of ideal MHD equations. Such solutions represent the flow stage after the diverging reflected MHD shock starts propagating into the converging magnetized plasma, leaving behind the stagnated plasma. Formally, they are MHD generalizations of the well-known Noh solution for a constant velocity gas that stagnates against an axis of symmetry, producing an outward moving shock. In gas dynamics, solutions of this class were discovered by Sedov and published in 1954 in the third Russian edition of his book; see Sedov (Reference Sedov1959, Chapter 4, § 7). They did not attract attention until being rediscovered by Noh (Reference Noh1983, Reference Noh1987). The simple, explicit Noh solution obtained for an infinitely strong shock in an ideal gas became the workhorse of compressible hydrocode verification for over three decades. It can be generalized for an arbitrary shock strength (Velikovich, Giuliani & Zalesak Reference Velikovich, Giuliani and Zalesak2018) and equation of state (Velikovich & Giuliani Reference Velikovich and Giuliani2018). An MHD generalization for the Z-pinch geometry, i.e. with the azimuthal magnetic field, is also available (Velikovich et al. Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012). This 1-D self-similar solution has been successfully used to verify several hydrocodes, including Mach2, Athena++, FLASH (Tzeferacos et al. Reference Tzeferacos, Fatenejad, Flocke, Gregori, Lamb, Lee, Meinecke, Scopatz and Weide2012). The consistent convergence of two-dimensional (2-D) numerical solutions obtained with MHD hydrocodes to the 1-D self-similar solution illustrated the stability of the latter.
In what follows, we present an extended family of self-similar solutions of cylindrical, magnetized Noh problems, the magnetic fields of which are both azimuthal and axial. It also includes sheared rotation of the stagnating plasma. There is a clear analogy between the dynamic effects of the axial magnetic flux compression and the rotation of an imploded plasma column. The force impeding implosion is inversely proportional to the cubed radius of the column, as explained by Velikovich & Davis (Reference Velikovich and Davis1995) for the case of solid rotation and homogeneous-deformation self-similar solutions. Of course, the analogy remains valid for a broader class of solutions described here. The actual production of sheared rotation in Z-pinch implosions in an axial magnetic field is a very recent experimental finding (Cvejić et al. Reference Cvejić2022). The new solutions will be helpful both to analyse the experimental results on the self-generated rotation of magnetized Z-pinch plasmas and to verify MHD codes aiming to simulate this effect. We also imagine it could be useful in the astrophysical community dealing with shocked accretion from magnetized and rotating accretion disks.
Instead of an elaborate semi-analytic procedure used by Velikovich et al. (Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012) to construct a solution to be tabulated, we present its implementation as a Python code that the readers can use to generate any solution of this family. This option makes it more accessible for analysis and code verification than the solutions that describe axisymmetric MHD shock propagation through a rotating medium in astrophysical literature; see Vishwakarma, Maurya & Singh (Reference Vishwakarma, Maurya and Singh2007), Nath & Singh (Reference Nath and Singh2020) and references therein. Our new analysis reveals a previously unknown property of magnetized Noh solutions, in contrast with the classical solution (Noh Reference Noh1983, Reference Noh1987) and its gas-dynamic generalizations. Specifically, a stagnating flow with a radially expanding accretion shock emerges at  $t=0+$ even if the plasma is initially at rest everywhere. The stagnation is caused by the imbalance of radial forces acting upon the plasma, and it takes place with or without the axial magnetic field and/or rotation. We have demonstrated a consistent convergence of Athena++ 1-D simulation results to our self-similar solutions for all cases: with or without the axial magnetic field, initial rotation and initial radial motion. Another new feature discovered in our 2-D Athena++ numerical simulations of supersonic stagnation in an axial magnetic field is the instability of this flow obtained for some perturbation modes with specific base-flow parameters. This behaviour was unexpected because gas-dynamic Noh-type accretion shock flows are typically stable, cf. Velikovich et al. (Reference Velikovich, Murakami, Taylor, Giuliani, Zalesak and Iwamoto2016) and Huete et al. (Reference Huete, Velikovich, Martinez-Ruiz and Calvo-Rivera2021). Two-dimensional simulations of stagnation described by the magnetized Noh solution with an azimuthal magnetic field detected no instability. The instability emerges only when the axial magnetic field is added. It is not of magneto-rotational origin because it manifests itself even without rotation. While the physical mechanism driving this new instability deserves further study, we found parameter ranges in which our new solutions are stable and can be confidently used for code verification in two dimensions.
$t=0+$ even if the plasma is initially at rest everywhere. The stagnation is caused by the imbalance of radial forces acting upon the plasma, and it takes place with or without the axial magnetic field and/or rotation. We have demonstrated a consistent convergence of Athena++ 1-D simulation results to our self-similar solutions for all cases: with or without the axial magnetic field, initial rotation and initial radial motion. Another new feature discovered in our 2-D Athena++ numerical simulations of supersonic stagnation in an axial magnetic field is the instability of this flow obtained for some perturbation modes with specific base-flow parameters. This behaviour was unexpected because gas-dynamic Noh-type accretion shock flows are typically stable, cf. Velikovich et al. (Reference Velikovich, Murakami, Taylor, Giuliani, Zalesak and Iwamoto2016) and Huete et al. (Reference Huete, Velikovich, Martinez-Ruiz and Calvo-Rivera2021). Two-dimensional simulations of stagnation described by the magnetized Noh solution with an azimuthal magnetic field detected no instability. The instability emerges only when the axial magnetic field is added. It is not of magneto-rotational origin because it manifests itself even without rotation. While the physical mechanism driving this new instability deserves further study, we found parameter ranges in which our new solutions are stable and can be confidently used for code verification in two dimensions.
The paper is structured as follows. Figure 1 shows our problem set-up. In § 2 we present self-contained derivation of the main dynamical equations. In § 3 we describe shock jump conditions as well as a general procedure of obtaining the self-similar solution and its verification with MHD code Athena. In § 4 we consider an interesting special case with zero initial velocity. In § 5 we describe rotating solutions and their verification. In § 6 we describe our numerical findings of stability of our solutions to azimuthal perturbations. In § 7 we provide some examples of code verification on a 2-D Cartesian grid. In § 8 we summarize and discuss our findings. In § 9 we refer the reader to our publicly released code. Appendices A and B are dedicated to deriving the asymptotic behaviour of our solutions close to the origin and at very large distances from the origin, respectively.

Figure 1. A drawing of a supersonic, shocked, axisymmetric, magnetized, rotating implosion. Here  $v_r$ is an implosion velocity,
$v_r$ is an implosion velocity,  $v_\phi$ – rotation velocity,
$v_\phi$ – rotation velocity,  $V_s$ – expanding shock velocity,
$V_s$ – expanding shock velocity,  $B_\phi$ and
$B_\phi$ and  $B_z$ are the azimuthal and axial magnetic field produced by, correspondingly,
$B_z$ are the azimuthal and axial magnetic field produced by, correspondingly,  $j_z$ and
$j_z$ and  $j_\phi$ current densities.
$j_\phi$ current densities.
2. Analytic derivation
We start with the equations for ideal, isentropic, cylindrically symmetric MHD flow. For the density  $\rho$, radial velocity
$\rho$, radial velocity  $v_r$, azimuthal velocity
$v_r$, azimuthal velocity  $v_\phi$, pressure
$v_\phi$, pressure  $p$, azimuthal magnetic field
$p$, azimuthal magnetic field  $B_\phi$, axial magnetic field
$B_\phi$, axial magnetic field  $B_z$, we write the continuity, radial momentum, angular momentum, specific entropy and Faraday's law as
$B_z$, we write the continuity, radial momentum, angular momentum, specific entropy and Faraday's law as
 \begin{gather} \frac{\partial \rho}{\partial t}+\frac{1}{r} \frac{\partial}{\partial r}(r \rho v_r)=0, \end{gather}
\begin{gather} \frac{\partial \rho}{\partial t}+\frac{1}{r} \frac{\partial}{\partial r}(r \rho v_r)=0, \end{gather} \begin{gather} \frac{\partial(\rho v_r)}{\partial t}+\frac{1}{r} \frac{\partial}{\partial r}\left(r \rho v_r^{2}\right)+\frac{\partial p}{\partial r}+\frac{\partial}{\partial r}\left(\frac{B^{2}_\phi+B^{2}_z}{8 {\rm \pi}}\right)+\frac{B^{2}_\phi}{4 {\rm \pi}r}-\frac{\rho v^2_\phi}{r}=0, \end{gather}
\begin{gather} \frac{\partial(\rho v_r)}{\partial t}+\frac{1}{r} \frac{\partial}{\partial r}\left(r \rho v_r^{2}\right)+\frac{\partial p}{\partial r}+\frac{\partial}{\partial r}\left(\frac{B^{2}_\phi+B^{2}_z}{8 {\rm \pi}}\right)+\frac{B^{2}_\phi}{4 {\rm \pi}r}-\frac{\rho v^2_\phi}{r}=0, \end{gather} \begin{gather} \frac{\partial(\rho v_\phi)}{\partial t}+\frac{\partial}{\partial r}\left(\rho v_r v_\phi\right)+ 2\frac{\rho v_r v_\phi}{r}=0, \end{gather}
\begin{gather} \frac{\partial(\rho v_\phi)}{\partial t}+\frac{\partial}{\partial r}\left(\rho v_r v_\phi\right)+ 2\frac{\rho v_r v_\phi}{r}=0, \end{gather} \begin{gather} \frac{\partial p}{\partial t}+\frac{\gamma p}{r} \frac{\partial}{\partial r}(rv_r)+v_r \frac{\partial p}{\partial r}=0, \end{gather}
\begin{gather} \frac{\partial p}{\partial t}+\frac{\gamma p}{r} \frac{\partial}{\partial r}(rv_r)+v_r \frac{\partial p}{\partial r}=0, \end{gather} \begin{gather} \frac{\partial B_\phi}{\partial t}+\frac{\partial}{\partial r}(v_r B_\phi)=0, \end{gather}
\begin{gather} \frac{\partial B_\phi}{\partial t}+\frac{\partial}{\partial r}(v_r B_\phi)=0, \end{gather} \begin{gather} \frac{\partial B_z}{\partial t}+\frac1r\frac{\partial}{\partial r}(r v_r B_z)=0. \end{gather}
\begin{gather} \frac{\partial B_z}{\partial t}+\frac1r\frac{\partial}{\partial r}(r v_r B_z)=0. \end{gather}
In the case of cylindrical symmetry, the radial component of the magnetic field,  $B_r$ is zero due to the divergence-free condition for the magnetic field. We will assume that the z-velocity component is zero because, due to Galilean invariance it does not participate in the dynamics, but is rather passively advected by the flow. Later in the paper, we will study the stability of this problem with respect to the azimuthal perturbations, in which case most components will be non-zero. However, while doing this, we will keep the origin at rest, which is implied by our cylindrical coordinates.
$B_r$ is zero due to the divergence-free condition for the magnetic field. We will assume that the z-velocity component is zero because, due to Galilean invariance it does not participate in the dynamics, but is rather passively advected by the flow. Later in the paper, we will study the stability of this problem with respect to the azimuthal perturbations, in which case most components will be non-zero. However, while doing this, we will keep the origin at rest, which is implied by our cylindrical coordinates.
We use the equations above to describe a self-similar imploding cylindrical plasma, which stagnates in a shock front expanding at a constant velocity. We assume that at the shock the entropy conservation should be replaced with a shock jump condition, as described below. We define the self-similar variable as
 \begin{equation} \eta \equiv \frac{r}{t} \Rightarrow r=\eta t, \end{equation}
\begin{equation} \eta \equiv \frac{r}{t} \Rightarrow r=\eta t, \end{equation}
we also assume without loss of generality that the outward propagating shock velocity is unity, i.e. the shock front is always located at  $\eta =1$. We seek the self-similar MHD solution in the form
$\eta =1$. We seek the self-similar MHD solution in the form
 $$\begin{gather} v_r(r,t)=\eta U(\eta), \end{gather}$$
$$\begin{gather} v_r(r,t)=\eta U(\eta), \end{gather}$$ $$\begin{gather}v_\phi(r,t)=\eta W(\eta), \end{gather}$$
$$\begin{gather}v_\phi(r,t)=\eta W(\eta), \end{gather}$$ $$\begin{gather}\rho(r, t)=t^{2 \chi} N(\eta), \end{gather}$$
$$\begin{gather}\rho(r, t)=t^{2 \chi} N(\eta), \end{gather}$$ $$\begin{gather}p(r,t)=t^{2 \chi} P(\eta), \end{gather}$$
$$\begin{gather}p(r,t)=t^{2 \chi} P(\eta), \end{gather}$$ $$\begin{gather}B_\phi(r,t)=t^{\chi} \sqrt{4{\rm \pi}} H_\phi(\eta), \end{gather}$$
$$\begin{gather}B_\phi(r,t)=t^{\chi} \sqrt{4{\rm \pi}} H_\phi(\eta), \end{gather}$$ $$\begin{gather}B_z(r,t)=t^{\chi} \sqrt{4{\rm \pi}} H_z(\eta). \end{gather}$$
$$\begin{gather}B_z(r,t)=t^{\chi} \sqrt{4{\rm \pi}} H_z(\eta). \end{gather}$$
Here  $\chi >0$ is a dimensionless parameter characterizing the self-similar scaling of physical quantities. The initial conditions for our problem will be
$\chi >0$ is a dimensionless parameter characterizing the self-similar scaling of physical quantities. The initial conditions for our problem will be
 \begin{equation} \left. \begin{gathered} v_r(r, t=0) =v_{r0} ; \quad v_\phi(r, t=0)=v_{\phi 0} ; \quad \rho(r, t=0)=\rho_{0} r^{2 \chi},\\ B_{\phi,z}(r, t=0) =B_{\{\phi,z\} 0} r^{\chi} ; \quad p(r,t=0)=0, \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} v_r(r, t=0) =v_{r0} ; \quad v_\phi(r, t=0)=v_{\phi 0} ; \quad \rho(r, t=0)=\rho_{0} r^{2 \chi},\\ B_{\phi,z}(r, t=0) =B_{\{\phi,z\} 0} r^{\chi} ; \quad p(r,t=0)=0, \end{gathered} \right\} \end{equation}
we also restrict ourselves to zero initial pressure, as we seek to generalize the Noh problem. With finite density this corresponds to zero temperature of inflowing gas. These initial values are related to the limit  $\eta \to \infty$ as
$\eta \to \infty$ as
 \begin{equation} \left. \begin{gathered} v_{r0} =\lim_{\eta\to\infty} U(\eta) \eta,\quad v_{\phi 0}=\lim_{\eta\to\infty} W(\eta) \eta,\\ \rho_0 =\lim_{\eta\to\infty} N(\eta) \eta^{{-}2\chi},\quad B_{\{\phi,z\} 0}=\sqrt{4{\rm \pi}} \lim_{\eta\to\infty} H_{\phi,z}(\eta) \eta^{-\chi}. \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} v_{r0} =\lim_{\eta\to\infty} U(\eta) \eta,\quad v_{\phi 0}=\lim_{\eta\to\infty} W(\eta) \eta,\\ \rho_0 =\lim_{\eta\to\infty} N(\eta) \eta^{{-}2\chi},\quad B_{\{\phi,z\} 0}=\sqrt{4{\rm \pi}} \lim_{\eta\to\infty} H_{\phi,z}(\eta) \eta^{-\chi}. \end{gathered} \right\} \end{equation}
To transform variables  $(r,t) \to (\eta, t)$, we use
$(r,t) \to (\eta, t)$, we use
 \begin{equation} \frac{\partial}{\partial r} \rightarrow \frac{1}{t} \frac{\partial}{\partial \eta}, \quad \frac{\partial}{\partial t} \rightarrow \frac{\partial}{\partial t}-\frac{\eta}{t} \frac{\partial}{\partial \eta}. \end{equation}
\begin{equation} \frac{\partial}{\partial r} \rightarrow \frac{1}{t} \frac{\partial}{\partial \eta}, \quad \frac{\partial}{\partial t} \rightarrow \frac{\partial}{\partial t}-\frac{\eta}{t} \frac{\partial}{\partial \eta}. \end{equation}Then, in the MHD equations the time derivative drops out and we arrive at
 $$\begin{gather} (U-1) \frac{{\rm d} \ln N}{{\rm d} \ln \eta}+\frac{{\rm d} U}{{\rm d} \ln \eta}+2 U+2 \chi=0, \end{gather}$$
$$\begin{gather} (U-1) \frac{{\rm d} \ln N}{{\rm d} \ln \eta}+\frac{{\rm d} U}{{\rm d} \ln \eta}+2 U+2 \chi=0, \end{gather}$$ $$\begin{gather}(U-1)\left[\frac{{\rm d} U}{{\rm d} \ln \eta}+U\right]-W^2+\frac{1}{\eta^{2} N}\left[\frac{{\rm d} P}{{\rm d} \ln \eta}+\frac{H_\phi}{\eta} \frac{{\rm d}(\eta H_\phi)}{{\rm d} \ln \eta}+\frac12\frac{{\rm d}H_z^2}{{\rm d} \ln \eta}\right]=0, \end{gather}$$
$$\begin{gather}(U-1)\left[\frac{{\rm d} U}{{\rm d} \ln \eta}+U\right]-W^2+\frac{1}{\eta^{2} N}\left[\frac{{\rm d} P}{{\rm d} \ln \eta}+\frac{H_\phi}{\eta} \frac{{\rm d}(\eta H_\phi)}{{\rm d} \ln \eta}+\frac12\frac{{\rm d}H_z^2}{{\rm d} \ln \eta}\right]=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln W}{{\rm d} \ln \eta}+2U-1=0, \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln W}{{\rm d} \ln \eta}+2U-1=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln P}{{\rm d} \ln \eta}+\gamma \frac{{\rm d} U}{{\rm d} \ln \eta}+2 \gamma U+2 \chi=0, \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln P}{{\rm d} \ln \eta}+\gamma \frac{{\rm d} U}{{\rm d} \ln \eta}+2 \gamma U+2 \chi=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln H_\phi}{{\rm d} \ln \eta}+\frac{{\rm d} U}{{\rm d} \ln \eta}+U+\chi=0, \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln H_\phi}{{\rm d} \ln \eta}+\frac{{\rm d} U}{{\rm d} \ln \eta}+U+\chi=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln H_z}{{\rm d} \ln \eta}+\frac{{\rm d} U}{{\rm d} \ln \eta}+2U+\chi=0. \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln H_z}{{\rm d} \ln \eta}+\frac{{\rm d} U}{{\rm d} \ln \eta}+2U+\chi=0. \end{gather}$$
Note the following symmetry of (2.17)–(2.22): they are invariant under arbitrary scaling transforms of  $\eta$,
$\eta$,  $P$,
$P$,  $N$,
$N$,  $H_\phi$ and
$H_\phi$ and  $H_z$, provided that
$H_z$, provided that  $P/\eta ^2N$,
$P/\eta ^2N$,  $H_\phi ^2/\eta ^2N$,
$H_\phi ^2/\eta ^2N$,  $H_z^2/\eta ^2N$ stay constant. Physically this means rescaling units for the pressure, density and magnetic field while keeping sonic and Alfvén speed the same. This symmetry can be utilized to simplify the system (2.17)–(2.22) further by introducing new variables
$H_z^2/\eta ^2N$ stay constant. Physically this means rescaling units for the pressure, density and magnetic field while keeping sonic and Alfvén speed the same. This symmetry can be utilized to simplify the system (2.17)–(2.22) further by introducing new variables
 \begin{equation} S=\frac{\gamma P}{\eta^{2} N(1-U)} \quad {\rm and} \quad A_{\{\phi,z\}}=\frac{H^{2}_{\{\phi,z\}}}{\eta^{2} N(1-U)}, \end{equation}
\begin{equation} S=\frac{\gamma P}{\eta^{2} N(1-U)} \quad {\rm and} \quad A_{\{\phi,z\}}=\frac{H^{2}_{\{\phi,z\}}}{\eta^{2} N(1-U)}, \end{equation}as done in Liberman & Velikovich (Reference Liberman and Velikovich1986), Felber et al. (Reference Felber, Malley, Wessel, Matzen, Palmer, Spielman, Liberman and Velikovich1988) and Venkatesan & Choe (Reference Venkatesan and Choe1992). We define Mach numbers as
 \begin{equation} M_{s}^{2}=\frac{(v_r-\eta)^{2}}{c_{s}^{2}}=\frac{1-U}{S}, \quad M_{A\{\phi,z\}}^{2}=\frac{(v_r-\eta)^{2}}{v_{A\{\phi,z\}}^{2}}=\frac{1-U}{A_{\{\phi,z\}}}, \end{equation}
\begin{equation} M_{s}^{2}=\frac{(v_r-\eta)^{2}}{c_{s}^{2}}=\frac{1-U}{S}, \quad M_{A\{\phi,z\}}^{2}=\frac{(v_r-\eta)^{2}}{v_{A\{\phi,z\}}^{2}}=\frac{1-U}{A_{\{\phi,z\}}}, \end{equation}
where  $c_{s}=\sqrt {\gamma p/ \rho }$ and
$c_{s}=\sqrt {\gamma p/ \rho }$ and  $v_{A_{\{\phi,z\}}}=B_{\{\phi,z\}} / \sqrt {4 {\rm \pi}\rho }$ are the local values of the speed of sound and Alfvén speed,
$v_{A_{\{\phi,z\}}}=B_{\{\phi,z\}} / \sqrt {4 {\rm \pi}\rho }$ are the local values of the speed of sound and Alfvén speed,  $\eta$ is the ‘phase’ velocity of the self-similar profile. These are the local Mach numbers of the radial flow velocity relative to the surfaces of constant
$\eta$ is the ‘phase’ velocity of the self-similar profile. These are the local Mach numbers of the radial flow velocity relative to the surfaces of constant  $\eta$, i.e.
$\eta$, i.e.  $v_r-\eta =\eta (U(\eta )-1)$. At
$v_r-\eta =\eta (U(\eta )-1)$. At  $\eta =1$, the Mach numbers (2.24a,b) characterize the flow velocity with respect to the shock front. It is also useful to introduce the fast magnetosonic Mach number as
$\eta =1$, the Mach numbers (2.24a,b) characterize the flow velocity with respect to the shock front. It is also useful to introduce the fast magnetosonic Mach number as
 \begin{equation} M_F^{2}=\frac{1-U}{S+A_\phi+A_z}. \end{equation}
\begin{equation} M_F^{2}=\frac{1-U}{S+A_\phi+A_z}. \end{equation}Introducing new variables, we are left with the following five equations:
 $$\begin{gather} (U+S+A_\phi+A_z-1) \frac{{\rm d} U}{{\rm d} \ln \eta}+U(U-1)-W^2 \nonumber\\ \hskip6pc +\,2 S\left(U+\frac{\chi}{\gamma}\right)+(\chi+1)A_\phi+(\chi+2U)A_z=0, \end{gather}$$
$$\begin{gather} (U+S+A_\phi+A_z-1) \frac{{\rm d} U}{{\rm d} \ln \eta}+U(U-1)-W^2 \nonumber\\ \hskip6pc +\,2 S\left(U+\frac{\chi}{\gamma}\right)+(\chi+1)A_\phi+(\chi+2U)A_z=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln W}{{\rm d} \ln \eta}+2U-1=0, \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln W}{{\rm d} \ln \eta}+2U-1=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln S}{{\rm d} \ln \eta}+\gamma \frac{{\rm d} U}{{\rm d} \ln \eta}+2(\gamma U-1)=0, \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln S}{{\rm d} \ln \eta}+\gamma \frac{{\rm d} U}{{\rm d} \ln \eta}+2(\gamma U-1)=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln A_\phi}{{\rm d} \ln \eta}+2 \frac{{\rm d} U}{{\rm d} \ln \eta}+2U-2=0, \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln A_\phi}{{\rm d} \ln \eta}+2 \frac{{\rm d} U}{{\rm d} \ln \eta}+2U-2=0, \end{gather}$$ $$\begin{gather}(U-1) \frac{{\rm d} \ln A_z}{{\rm d} \ln \eta}+2 \frac{{\rm d} U}{{\rm d} \ln \eta}+4U-2=0. \end{gather}$$
$$\begin{gather}(U-1) \frac{{\rm d} \ln A_z}{{\rm d} \ln \eta}+2 \frac{{\rm d} U}{{\rm d} \ln \eta}+4U-2=0. \end{gather}$$By combining (2.27)–(2.30) and (2.17) it is possible to write several explicit integrals of our system, namely
 $$\begin{gather} S^{\chi+1}N^{1-\gamma}\left[\eta^2(1-U)\right]^{\gamma\chi+1}={\rm const.}, \end{gather}$$
$$\begin{gather} S^{\chi+1}N^{1-\gamma}\left[\eta^2(1-U)\right]^{\gamma\chi+1}={\rm const.}, \end{gather}$$ $$\begin{gather}A_\phi(1-U)^2\eta^2=v^2_{A\phi 0}, \end{gather}$$
$$\begin{gather}A_\phi(1-U)^2\eta^2=v^2_{A\phi 0}, \end{gather}$$ $$\begin{gather}A_z^{\chi+1}N^{{-}1}\left[\eta^2(1-U)\right]^{2\chi+1}=v^{2(\chi+1)}_{Az0}\rho_0^{{-}1}, \end{gather}$$
$$\begin{gather}A_z^{\chi+1}N^{{-}1}\left[\eta^2(1-U)\right]^{2\chi+1}=v^{2(\chi+1)}_{Az0}\rho_0^{{-}1}, \end{gather}$$ $$\begin{gather}W^2 A_z^{{-}1}(1-U)^{{-}2}=(v_{\phi 0}/v_{Az0})^2, \end{gather}$$
$$\begin{gather}W^2 A_z^{{-}1}(1-U)^{{-}2}=(v_{\phi 0}/v_{Az0})^2, \end{gather}$$
where  $v_{A\{\phi,z\}0}=v_{A\{\phi,z\}}(t=0)$. These correspond to the frozen-in condition for specific entropy,
$v_{A\{\phi,z\}0}=v_{A\{\phi,z\}}(t=0)$. These correspond to the frozen-in condition for specific entropy,  $\phi$ and
$\phi$ and  $z$ components of the magnetic field and conservation of angular momentum. Note that the first integral is broken at the shock, being zero for
$z$ components of the magnetic field and conservation of angular momentum. Note that the first integral is broken at the shock, being zero for  $\eta >1$ and non-zero for
$\eta >1$ and non-zero for  $\eta <1$ because the specific entropy does not conserve in shocks. Its value in the post-shock fluid can be obtained from the shock jump condition that we describe in the next section. Numerically, it is often easier to solve the system (2.17) and (2.26)–(2.30) directly, without involving integrals.
$\eta <1$ because the specific entropy does not conserve in shocks. Its value in the post-shock fluid can be obtained from the shock jump condition that we describe in the next section. Numerically, it is often easier to solve the system (2.17) and (2.26)–(2.30) directly, without involving integrals.
We look for regular solutions which have  $U\leq 0$, so
$U\leq 0$, so  $(U-1)$ is always non-zero. The prefix
$(U-1)$ is always non-zero. The prefix  $U+S+A_\phi +A_z-1$ in the (2.26) can be represented as
$U+S+A_\phi +A_z-1$ in the (2.26) can be represented as  $(U-1)(1-1/M_F^2)$. The solution becomes singular at the fast magnetosonic point where the local velocity with respect to the shock is equal to the group velocity of the fast magnetosonic mode. At large
$(U-1)(1-1/M_F^2)$. The solution becomes singular at the fast magnetosonic point where the local velocity with respect to the shock is equal to the group velocity of the fast magnetosonic mode. At large  $\eta$ the fast magnetosonic Mach number
$\eta$ the fast magnetosonic Mach number  $M_F$ is larger than unity, while after crossing the fast shock it becomes smaller than unity. A regular solution is obtained when the prefix in the (2.26) changes its sign only at the shock. (The solution can, in principle, pass the fast magnetosonic point regularly, if we require that the last four terms of the (2.26) sum to zero at the fast magnetosonic point, but this will require one extra constraint imposed on the initial conditions. We will not seek these special solutions and they will be considered elsewhere.)
$M_F$ is larger than unity, while after crossing the fast shock it becomes smaller than unity. A regular solution is obtained when the prefix in the (2.26) changes its sign only at the shock. (The solution can, in principle, pass the fast magnetosonic point regularly, if we require that the last four terms of the (2.26) sum to zero at the fast magnetosonic point, but this will require one extra constraint imposed on the initial conditions. We will not seek these special solutions and they will be considered elsewhere.)
3. Evaluating self-similar non-rotating solutions
We solve the main system (2.26)–(2.30) in a natural fashion, starting with initial conditions (2.14) that impose boundary conditions for our dynamic variables at infinity (2.15). Numerically, we start with a very large value of  $\eta$ and integrate the system (2.26)–(2.30) towards
$\eta$ and integrate the system (2.26)–(2.30) towards  $\eta =1$ where we assume the shock is located. We do so without a lack of generality, because if the shock is located at a different
$\eta =1$ where we assume the shock is located. We do so without a lack of generality, because if the shock is located at a different  $\eta$, i.e. the shock has a different velocity, we can rescale all quantities to renormalize back to the shock speed of unity. For example, we can keep
$\eta$, i.e. the shock has a different velocity, we can rescale all quantities to renormalize back to the shock speed of unity. For example, we can keep  $N$ constant and rescale initial
$N$ constant and rescale initial  $A_{\phi,z}$ by a shock speed squared. At large values of
$A_{\phi,z}$ by a shock speed squared. At large values of  $\eta$ our numerical solution is consistent with the analytical asymptotic formulae presented in Appendix B.
$\eta$ our numerical solution is consistent with the analytical asymptotic formulae presented in Appendix B.
At the shock we apply the standard MHD shock jump conditions (Landau & Lifshitz Reference Landau and Lifshitz1960; Liberman & Velikovich Reference Liberman and Velikovich1986),
 $$\begin{gather} U \to 1-\mu(1-U), \end{gather}$$
$$\begin{gather} U \to 1-\mu(1-U), \end{gather}$$ $$\begin{gather}A_{\{\phi,z\}} \to A_{\{\phi,z\}}/\mu^2, \end{gather}$$
$$\begin{gather}A_{\{\phi,z\}} \to A_{\{\phi,z\}}/\mu^2, \end{gather}$$ $$\begin{gather}S \to (1-U)/M_S^2, \end{gather}$$
$$\begin{gather}S \to (1-U)/M_S^2, \end{gather}$$
where the density compression parameter  $\mu =\rho _1/\rho _2$ and
$\mu =\rho _1/\rho _2$ and  $M_S$ are determined by the solution of a quadratic equation for
$M_S$ are determined by the solution of a quadratic equation for  $\mu$,
$\mu$,
 $$\begin{gather} \mu=\frac{\gamma_2+1/M_{A}^2+\sqrt{(\gamma_2+1/M_{A}^2)^2+4(1-2\gamma_2)(2-\gamma_2)/M_{A}^2}}{4-2\gamma_2}, \end{gather}$$
$$\begin{gather} \mu=\frac{\gamma_2+1/M_{A}^2+\sqrt{(\gamma_2+1/M_{A}^2)^2+4(1-2\gamma_2)(2-\gamma_2)/M_{A}^2}}{4-2\gamma_2}, \end{gather}$$ $$\begin{gather}\frac1{M_S^2}=\gamma\left(1-\mu-\frac{1/\mu^2-1}{2M_{A}^2}\right), \end{gather}$$
$$\begin{gather}\frac1{M_S^2}=\gamma\left(1-\mu-\frac{1/\mu^2-1}{2M_{A}^2}\right), \end{gather}$$
where  $\gamma _2=1-1/\gamma$ and
$\gamma _2=1-1/\gamma$ and  $M_A^{-2}=M_{A\phi }^{-2}+M_{Az}^{-2}$. Keep in mind that
$M_A^{-2}=M_{A\phi }^{-2}+M_{Az}^{-2}$. Keep in mind that  $M_S^2$ is different from
$M_S^2$ is different from  $M_s^2$ in (2.24a,b) in that the former is the ratio of pre-shocked
$M_s^2$ in (2.24a,b) in that the former is the ratio of pre-shocked  $1-U$ to post-shock
$1-U$ to post-shock  $S$. After the shock, we continue to integrate the system (2.26)–(2.30) keeping an eye on the sign of
$S$. After the shock, we continue to integrate the system (2.26)–(2.30) keeping an eye on the sign of  $U$ and the sign of
$U$ and the sign of  $1-M_F$. We want to obtain the regular solution that stagnates on axis, i.e. have
$1-M_F$. We want to obtain the regular solution that stagnates on axis, i.e. have  $\eta U \to 0$ as
$\eta U \to 0$ as  $\eta \to 0$. In Appendix A we analytically derive boundary conditions for
$\eta \to 0$. In Appendix A we analytically derive boundary conditions for  $U$ at the origin,
$U$ at the origin,  $U_0$. For
$U_0$. For  $\gamma >2$,
$\gamma >2$,  $U_0=-\chi /\gamma$, for
$U_0=-\chi /\gamma$, for  $\gamma <2$ and the non-rotating case,
$\gamma <2$ and the non-rotating case,  $U_0=-\chi /2$. For the rotating case, the expression is more complicated and provided in Appendix A.
$U_0=-\chi /2$. For the rotating case, the expression is more complicated and provided in Appendix A.
We can always obtain the solution that stagnates at larger  $\eta$ by choosing sufficiently small
$\eta$ by choosing sufficiently small  $-v_0$. At the same time, if
$-v_0$. At the same time, if  $-v_0$ is too large, we have the solution that either crosses the fast magnetosonic point or has
$-v_0$ is too large, we have the solution that either crosses the fast magnetosonic point or has  $U-U_0<0$ at
$U-U_0<0$ at  $\eta =0$. Between these two extreme cases is our desired solution, which has
$\eta =0$. Between these two extreme cases is our desired solution, which has  $U=U_0$ at the origin.
$U=U_0$ at the origin.
Numerically, we can not integrate down to  $\eta =0$, so we choose some small but finite
$\eta =0$, so we choose some small but finite  $\eta _{min}$ to stop integration. We seek
$\eta _{min}$ to stop integration. We seek  $v_0$ that minimizes
$v_0$ that minimizes  $U-U_0$ at
$U-U_0$ at  $\eta _{min}$ by the bisection method, assuming that crossing the fast magnetosonic point means that
$\eta _{min}$ by the bisection method, assuming that crossing the fast magnetosonic point means that  $-v_0$ is too large while stagnating before
$-v_0$ is too large while stagnating before  $\eta _{min}$ means that
$\eta _{min}$ means that  $-v_0$ is too small. Once we obtained the converged solution, at small values of
$-v_0$ is too small. Once we obtained the converged solution, at small values of  $\eta$, our numerical solution is consistent with the analytical asymptotic formulae presented in Appendix A.
$\eta$, our numerical solution is consistent with the analytical asymptotic formulae presented in Appendix A.
Thus, we obtained a self-similar solution that has two parameters,  $\chi$ and
$\chi$ and  $\gamma$, and two initial conditions for
$\gamma$, and two initial conditions for  $A_{\{\phi,z\}}$ determined from (2.15). The solution for velocity and magnetic field expressed in physical units, have two more degrees of freedom – we can rescale the flow and the shock velocity to an arbitrary value, which will rescale pressure by the same factor squared and we can rescale density and the magnetic field while keeping
$A_{\{\phi,z\}}$ determined from (2.15). The solution for velocity and magnetic field expressed in physical units, have two more degrees of freedom – we can rescale the flow and the shock velocity to an arbitrary value, which will rescale pressure by the same factor squared and we can rescale density and the magnetic field while keeping  $B^2/\rho$ constant. The physical solution of magnetized Noh, therefore, may be classified by six parameters:
$B^2/\rho$ constant. The physical solution of magnetized Noh, therefore, may be classified by six parameters:  $\chi$,
$\chi$,  $\gamma$, shock velocity, initial density and the two components of the initial magnetic field. We can also obtain solutions with finite initial pressure, but will not analyse them here. In Appendix A we derive asymptotic behaviour of density, pressure,
$\gamma$, shock velocity, initial density and the two components of the initial magnetic field. We can also obtain solutions with finite initial pressure, but will not analyse them here. In Appendix A we derive asymptotic behaviour of density, pressure,  $B_\phi$ and
$B_\phi$ and  $B_z$ on axis. For the most physically relevant case of
$B_z$ on axis. For the most physically relevant case of  $\gamma <2$, we find that density, pressure and
$\gamma <2$, we find that density, pressure and  $B_\phi$ go to zero, while
$B_\phi$ go to zero, while  $B_z$ goes to a constant. The azimuthal current density
$B_z$ goes to a constant. The azimuthal current density  $j_\phi$ that creates
$j_\phi$ that creates  $B_z$ is regular if
$B_z$ is regular if  $\gamma <3/2$ and
$\gamma <3/2$ and  $\chi >2/(3-2\gamma )$. Otherwise,
$\chi >2/(3-2\gamma )$. Otherwise,  $j_\phi$ is singular, and since
$j_\phi$ is singular, and since  $B_z$ is energetically a dominant term on axis, this will create sizable dissipation in non-ideal plasmas.
$B_z$ is energetically a dominant term on axis, this will create sizable dissipation in non-ideal plasmas.
We found it is convenient to classify Mag Noh problems without rotation by four dimensionless numbers: the ratio of the initial axial to the initial azimuthal field  $r_b$; initial Alfvén speed in units of the shock speed
$r_b$; initial Alfvén speed in units of the shock speed  $M_a=v_A/V_s$ and
$M_a=v_A/V_s$ and  $\chi$ and
$\chi$ and  $\gamma$. The rotation adds another dimensionless parameter, which is a
$\gamma$. The rotation adds another dimensionless parameter, which is a  $v_{\phi 0}/v_{r0}$ ratio.
$v_{\phi 0}/v_{r0}$ ratio.
For a given set of parameters, we calculated the self-similar solution in a manner described above with a simple Euler ordinary differential equation solver, starting at  $\eta _{max}=10^5$ and ending at
$\eta _{max}=10^5$ and ending at  $\eta _{min}=10^{-5}$. Typically,
$\eta _{min}=10^{-5}$. Typically,  $2\times 10^5$ steps was enough to produce an accurate solution. We used the Athena code (Stone et al. Reference Stone, Tomida, White and Felker2020; Athena++ development team 2021) in cylindrical geometry to verify that our solutions are realized in numerical calculation. Athena is a finite volume Godunov code and we used its one-dimensional solver with first-order spatial reconstruction. (Higher-order reconstruction schemes often produce oscillations next to the shock. In this work we did not focus on the fast convergence of the numerical solution and, for the sake of simplicity, we used first order. Our publicly released code can be trivially modified to test higher-order convergence.) In Athena simulations we typically assume a shock speed of
$2\times 10^5$ steps was enough to produce an accurate solution. We used the Athena code (Stone et al. Reference Stone, Tomida, White and Felker2020; Athena++ development team 2021) in cylindrical geometry to verify that our solutions are realized in numerical calculation. Athena is a finite volume Godunov code and we used its one-dimensional solver with first-order spatial reconstruction. (Higher-order reconstruction schemes often produce oscillations next to the shock. In this work we did not focus on the fast convergence of the numerical solution and, for the sake of simplicity, we used first order. Our publicly released code can be trivially modified to test higher-order convergence.) In Athena simulations we typically assume a shock speed of  $10^7\ \textrm {cm}\ \textrm {s}^{-1}$, domain size of 8 cm with 4000 grid points and we evolve the solution to 30 ns, so that the shock is located at 0.3 cm. We use initial conditions (2.14), reflecting boundary at the origin and inflow boundary at the outer radius. The inflow boundary is not the correct boundary for our problem, but we assume that the domain size of 8 cm is large enough so that the perturbation set by the boundary does not propagate into the useful solution range 0–0.6 cm in 30 ns. Larger domain sizes may be needed for a large inflow velocity. Simulation parameters are tunable and we release our code to the public for an easy adoption by the community; see § 9. Figure 2 presents two example solutions, one of them having a regular and the other singular
$10^7\ \textrm {cm}\ \textrm {s}^{-1}$, domain size of 8 cm with 4000 grid points and we evolve the solution to 30 ns, so that the shock is located at 0.3 cm. We use initial conditions (2.14), reflecting boundary at the origin and inflow boundary at the outer radius. The inflow boundary is not the correct boundary for our problem, but we assume that the domain size of 8 cm is large enough so that the perturbation set by the boundary does not propagate into the useful solution range 0–0.6 cm in 30 ns. Larger domain sizes may be needed for a large inflow velocity. Simulation parameters are tunable and we release our code to the public for an easy adoption by the community; see § 9. Figure 2 presents two example solutions, one of them having a regular and the other singular  $B_z$ on axis. We also release this verification code to the public (see data release). We scanned our four-dimensional parameter space to determine the initial inflow speed normalized by the shock speed
$B_z$ on axis. We also release this verification code to the public (see data release). We scanned our four-dimensional parameter space to determine the initial inflow speed normalized by the shock speed  $v_0/V_s$ as a function of the four main parameters:
$v_0/V_s$ as a function of the four main parameters:  $\chi, \gamma, M_a$ and
$\chi, \gamma, M_a$ and  $B_z/B_\phi$. The results are presented in figure 3. The strongest dependence is on
$B_z/B_\phi$. The results are presented in figure 3. The strongest dependence is on  $\gamma$, with
$\gamma$, with  $\gamma$ approaching unity the compressibility increases and the shock Mach number can be very high. The dependence on the ratio of the magnetic components is rather weak, similarly, the index of similarity only moderately affects the strength of the shock. The dependence on the Alfvén Mach number upstream is interesting in that it reveals a solution that has
$\gamma$ approaching unity the compressibility increases and the shock Mach number can be very high. The dependence on the ratio of the magnetic components is rather weak, similarly, the index of similarity only moderately affects the strength of the shock. The dependence on the Alfvén Mach number upstream is interesting in that it reveals a solution that has  $v_0=0$. This is a rather special case of magnetic Noh because unlike classic Noh it does not have a flow hitting the wall, the initial condition is stationary.
$v_0=0$. This is a rather special case of magnetic Noh because unlike classic Noh it does not have a flow hitting the wall, the initial condition is stationary.

Figure 2. Two example solutions of magnetized Noh (red) verified with Athena++ in a one-dimensional cylindrical simulation (green circles). Both solutions initially have  $B_z/B_\phi =1$. Top solution:
$B_z/B_\phi =1$. Top solution:  $\chi =2.6, \gamma =1.1, v_A/V_s=0.84$ and
$\chi =2.6, \gamma =1.1, v_A/V_s=0.84$ and  $v_0/V_s=20$ have regular
$v_0/V_s=20$ have regular  $j_\phi$ on axis; bottom solution:
$j_\phi$ on axis; bottom solution:  $\chi =1.5, \gamma =5/3, v_A/V_s=0.52$ and
$\chi =1.5, \gamma =5/3, v_A/V_s=0.52$ and  $v_0/V_s=6.1$ have singular
$v_0/V_s=6.1$ have singular  $j_\phi$ on axis. Note that Athena++ is an MHD code that solves the initial value problem and is not in any way aware of either the solution self-similarity or the expected shock speed.
$j_\phi$ on axis. Note that Athena++ is an MHD code that solves the initial value problem and is not in any way aware of either the solution self-similarity or the expected shock speed.

Figure 3. Dependence of  $-v_0/V_s$ vs various parameters of the Mag Noh problem, in all but the last plot
$-v_0/V_s$ vs various parameters of the Mag Noh problem, in all but the last plot  $B_z/B_\phi =1$. Also note that in the upper left the
$B_z/B_\phi =1$. Also note that in the upper left the  $v_0$ axis is logarithmic.
$v_0$ axis is logarithmic.
4. Stationary initial conditions
Let us look at this interesting special case with zero initial velocity in more detail. This case deserves closer scrutiny because it is closer to practical applications such as Z-pinches, where the gas, initially at rest, is driven towards the axis and is shocked and heated. As far as code verifications are concerned, stationary initial conditions are easier to set up in some codes, e.g. the moving mesh codes.
In the case of fluid at rest initially, the flow develops due to the magnetic tension. One may expect that it would take some time to accelerate the flow before it develops a shock, this is not the case with our self-similar solution, however. In our solution the shock is present for all times  $t>0$, this is perhaps because density is very small near the origin and it takes very small tension to create a shock. In order to obtain these solutions, we modified the solver described above. Now we do not change the initial velocity to find the stagnating solution, but rather we change
$t>0$, this is perhaps because density is very small near the origin and it takes very small tension to create a shock. In order to obtain these solutions, we modified the solver described above. Now we do not change the initial velocity to find the stagnating solution, but rather we change  $B_\phi$. For sufficiently small
$B_\phi$. For sufficiently small  $B_\phi$, we expect the solution to stagnate before the origin, while at sufficiently large
$B_\phi$, we expect the solution to stagnate before the origin, while at sufficiently large  $B_\phi$ the solution either hits the origin with non-zero velocity or passes the fast magnetosonic point. Again, we seek
$B_\phi$ the solution either hits the origin with non-zero velocity or passes the fast magnetosonic point. Again, we seek  $B_\phi$ that minimizes
$B_\phi$ that minimizes  $|U-U_0|$ at
$|U-U_0|$ at  $\eta _{min}$ by the bisection method. All solutions we found have a sizable
$\eta _{min}$ by the bisection method. All solutions we found have a sizable  $v_A/V_s$, between 2.0 and 4.8, which is not surprising since some minimum magnetic tension is needed to create a shock.
$v_A/V_s$, between 2.0 and 4.8, which is not surprising since some minimum magnetic tension is needed to create a shock.
While studying the parameter space we found that solutions with different  $\chi$ and
$\chi$ and  $\gamma$ look very similar. Changing the
$\gamma$ look very similar. Changing the  $B_z/B_\phi$ ratio, however, makes quite a bit of difference. In figure 4 we show several solutions for
$B_z/B_\phi$ ratio, however, makes quite a bit of difference. In figure 4 we show several solutions for  $\chi =1.5$ and
$\chi =1.5$ and  $\gamma =5/3$ and different field ratios. Generally, the lower
$\gamma =5/3$ and different field ratios. Generally, the lower  $B_z$ results in a stronger shock with larger compression of the gas and both components of the field. The smaller the
$B_z$ results in a stronger shock with larger compression of the gas and both components of the field. The smaller the  $B_z/B_\phi$ ratio is, the more singular
$B_z/B_\phi$ ratio is, the more singular  $j_\phi$ becomes at the origin. In figure 4, bottom, we show the verification of the
$j_\phi$ becomes at the origin. In figure 4, bottom, we show the verification of the  $B_z/B_\phi =0.3$ solution with Athena++. Note that close to the origin the gas pressure goes to zero and is replaced by the magnetic pressure of
$B_z/B_\phi =0.3$ solution with Athena++. Note that close to the origin the gas pressure goes to zero and is replaced by the magnetic pressure of  $B_z$. The field ratio
$B_z$. The field ratio  $B_z/B_\phi$ is usually small in realistic Z-pinches and such solutions are potentially of practical interest since singular
$B_z/B_\phi$ is usually small in realistic Z-pinches and such solutions are potentially of practical interest since singular  $j_\phi$ can provide extra heating near the low-density origin and create a hot spot. Such heating is, of course, not present in our solutions of ideal MHD.
$j_\phi$ can provide extra heating near the low-density origin and create a hot spot. Such heating is, of course, not present in our solutions of ideal MHD.

Figure 4. Solutions with zero initial velocity with  $\chi =1.5$ and
$\chi =1.5$ and  $\gamma =5/3$. Plots (a–d) show several solutions with different
$\gamma =5/3$. Plots (a–d) show several solutions with different  $B_z/B_\phi$ ratios. (e–i) Verification with Athena++ of the above
$B_z/B_\phi$ ratios. (e–i) Verification with Athena++ of the above  $B_z/B_\phi =0.3$ solution with
$B_z/B_\phi =0.3$ solution with  $v_A/V_s=3.45$, singular
$v_A/V_s=3.45$, singular  $j_\phi$ on axis, self-similar (red) overplotted on Athena++ (green circles). Note that the top plot is log-scale, while the bottom plot is linear scale.
$j_\phi$ on axis, self-similar (red) overplotted on Athena++ (green circles). Note that the top plot is log-scale, while the bottom plot is linear scale.
5. Rotating solutions
We can obtain rotating solutions as well, in a manner similar to described above. For convenience, we introduce the rotation parameter, which is the ratio of initial rotation velocity to radial velocity. Rotating initial conditions are unusual in that we have to set rotating velocity to constant, even at the origin, which produces infinite vorticity. Our self-similar solver, however, does not have an issue with that, because initial conditions are set at infinity. It is, however, very interesting how numerical codes will handle such a situation. Figure 5 shows verification of our self-similar solution with the solution produced by Athena++ and the agreement is pretty good. One feature of the rotating solution is a singularity of rotation velocity at the origin, which is a consequence of the conservation of angular momentum. The other interesting feature is that adding rotation makes  $B_z$ go to zero on axis. This is easy to understand as the radial electric field
$B_z$ go to zero on axis. This is easy to understand as the radial electric field  $E_r$, which is absent in non-rotating solutions is now present and is equal to the product of
$E_r$, which is absent in non-rotating solutions is now present and is equal to the product of  $B_z$ and
$B_z$ and  $v_\phi$. Thus,
$v_\phi$. Thus,  $B_z v_\phi$ must go to zero at the origin and since
$B_z v_\phi$ must go to zero at the origin and since  $v_\phi$ diverges due to conservation of angular momentum,
$v_\phi$ diverges due to conservation of angular momentum,  $B_z$ must go to zero. In Appendix A we derived asymptotics of our solution close to the origin and found that stagnating solutions, shocked or not shocked, can only be obtained if
$B_z$ must go to zero. In Appendix A we derived asymptotics of our solution close to the origin and found that stagnating solutions, shocked or not shocked, can only be obtained if  $v_{\phi 0} < \chi ^{1/2} v_{Az0}$.
$v_{\phi 0} < \chi ^{1/2} v_{Az0}$.

Figure 5. Rotating solution produced by self-similar solver (red) overplotted on the solution produced by Athena++ (green dots).
6. Empirical findings of stability
Developing an analytical theory of stability of our self-similar Mag Noh problem requires significant time and effort, so for the time being we employed Athena++ in cylindrical geometry to investigate stability in an empirical fashion. We modified boundary conditions in such a way as to perform a simulation with five different domains in azimuthal angle  $\phi$, each domain covering
$\phi$, each domain covering  $2{\rm \pi}$ in angle. In the first domain, we did not introduce perturbations, while four other domains were seeded with a sinusoidal perturbation along
$2{\rm \pi}$ in angle. In the first domain, we did not introduce perturbations, while four other domains were seeded with a sinusoidal perturbation along  $\phi$, corresponding to mode
$\phi$, corresponding to mode  $m=\{1,2,4,8\}$ in one series of simulations and
$m=\{1,2,4,8\}$ in one series of simulations and  $m=\{3,5,6,10\}$ in the other. In the first series, the resolution was 64 grid points in each domain, and in the second, 60 points. We chose the resolution to be a common multiple of all
$m=\{3,5,6,10\}$ in the other. In the first series, the resolution was 64 grid points in each domain, and in the second, 60 points. We chose the resolution to be a common multiple of all  $m$. Since we did not know the
$m$. Since we did not know the  $m$ eigenmodes dependence in the radial direction, we have chosen the perturbation to be confined within the shocked region of the solution, for this reason, we introduced the perturbation, which was
$m$ eigenmodes dependence in the radial direction, we have chosen the perturbation to be confined within the shocked region of the solution, for this reason, we introduced the perturbation, which was  $10^{-3}$ in amplitude and present only in
$10^{-3}$ in amplitude and present only in  $B_\phi$ and
$B_\phi$ and  $B_r$ (the latter to preserve the divergence-free condition) starting with some initial time
$B_r$ (the latter to preserve the divergence-free condition) starting with some initial time  $t_i$ after which the shocked region has been already well established. Had we chose to perturb multiple variables, this would complicate the matter since we do not know the phase between different vectors in eigenmode space.
$t_i$ after which the shocked region has been already well established. Had we chose to perturb multiple variables, this would complicate the matter since we do not know the phase between different vectors in eigenmode space.
Our first numerical experiments have demonstrated some unstable solutions, many of them grew very rapidly at the maximum  $m$ possible (i.e. grid scale in
$m$ possible (i.e. grid scale in  $\phi$), seeded by the truncation error. To counteract this, we used a module to project the solution to the
$\phi$), seeded by the truncation error. To counteract this, we used a module to project the solution to the  $\exp (-\textrm {i} m \phi )$ at each time step. Projection was also needed due to cross-contamination of modes. Even if we set the initial perturbation in energy to
$\exp (-\textrm {i} m \phi )$ at each time step. Projection was also needed due to cross-contamination of modes. Even if we set the initial perturbation in energy to  $10^{-6}$, due to rapid growth of instability it may not stay small to the end of the simulation. In this case it will produce other modes due to nonlinearity, which will grow on their own. The projection made sure that we always study a pure
$10^{-6}$, due to rapid growth of instability it may not stay small to the end of the simulation. In this case it will produce other modes due to nonlinearity, which will grow on their own. The projection made sure that we always study a pure  $\exp (-\textrm {i} m \phi )$ mode. The loss of perturbation energy due to the projection was small if the amplitude was small. If not, a sizable fraction of energy can be transferred to other modes and removed by the projection, which had a stabilizing effect. We should assume, therefore, that the growth to large amplitudes is not accurate; see also the discussion below.
$\exp (-\textrm {i} m \phi )$ mode. The loss of perturbation energy due to the projection was small if the amplitude was small. If not, a sizable fraction of energy can be transferred to other modes and removed by the projection, which had a stabilizing effect. We should assume, therefore, that the growth to large amplitudes is not accurate; see also the discussion below.
Figure 6 demonstrates the ratio of the perturbation energy to the total energy of the shocked region as it evolves in time starting with  $t_i=4\times 10^{-9}\ \textrm {s}$ till the end of the simulation at
$t_i=4\times 10^{-9}\ \textrm {s}$ till the end of the simulation at  $t_e=3\times 10^{-8}\ \textrm {s}$. We had no way to guarantee that perturbation will stay small in all points; however, our projection module will eliminate any harmonics growing out of nonlinearity. Due to this the growth of the fastest growing modes could have been somewhat suppressed. Despite the fact that their evolution was not accurate at later times, we can still conclude that these quickly growing modes are unstable based on their evolution at earlier times. In figure 6 we have chosen two solutions from our parameter space, one of which we evaluate to be stable for all modes up to
$t_e=3\times 10^{-8}\ \textrm {s}$. We had no way to guarantee that perturbation will stay small in all points; however, our projection module will eliminate any harmonics growing out of nonlinearity. Due to this the growth of the fastest growing modes could have been somewhat suppressed. Despite the fact that their evolution was not accurate at later times, we can still conclude that these quickly growing modes are unstable based on their evolution at earlier times. In figure 6 we have chosen two solutions from our parameter space, one of which we evaluate to be stable for all modes up to  $m=10$ (except for 7 and 9, which we did not test), the other we judged to be unstable for all
$m=10$ (except for 7 and 9, which we did not test), the other we judged to be unstable for all  $m$ up to 10. To evaluate stability, we compared maximum relative perturbation at earlier times,
$m$ up to 10. To evaluate stability, we compared maximum relative perturbation at earlier times,  $0< t<5\times 10^{-9}\ \textrm {s}$ and later times
$0< t<5\times 10^{-9}\ \textrm {s}$ and later times  $6\times 10^{-9}\ \textrm {s}< t<3\times 10^{-8}\ \textrm {s}$. Needless to say, such evaluation should be viewed as preliminary, until the actual eigenmodes and eigenfrequencies are found.
$6\times 10^{-9}\ \textrm {s}< t<3\times 10^{-8}\ \textrm {s}$. Needless to say, such evaluation should be viewed as preliminary, until the actual eigenmodes and eigenfrequencies are found.

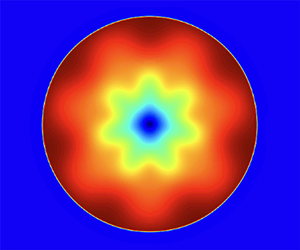
Figure 6. Relative perturbation energies for different azimuthal mode numbers  $m$ for one stable and one unstable solution of magnetized Noh.
$m$ for one stable and one unstable solution of magnetized Noh.
We scanned our parameter space on the  $\gamma,\chi$ plane, looking for stability. Figure 7 shows minimum unstable
$\gamma,\chi$ plane, looking for stability. Figure 7 shows minimum unstable  $m$, if it exists. Primarily, self-similar solutions with low
$m$, if it exists. Primarily, self-similar solutions with low  $\gamma$, high
$\gamma$, high  $\chi$ and high inflow velocity tend to be unstable. We also checked a few solutions with zero inflow velocity and found all of them stable.
$\chi$ and high inflow velocity tend to be unstable. We also checked a few solutions with zero inflow velocity and found all of them stable.

Figure 7. Minimum unstable  $m$ mode in the
$m$ mode in the  $\gamma,\chi$ place with
$\gamma,\chi$ place with  $M_a=0.52$ and
$M_a=0.52$ and  $B_z/B_\phi =1$.
$B_z/B_\phi =1$.
We did not study stability analytically and did not find exact eigenmodes of azimuthal perturbation; however, the possibility that we are seeing numerical rather than physical instability is rather remote. First of all, we are using Athena in cylindrical coordinates, so that the azimuthal perturbation is exactly along the coordinate axis. Numerical instability to azimuthal perturbations would require Athena to generate rather large fluxes of conservative quantities in the  $\phi$ direction. Given that perturbations in the
$\phi$ direction. Given that perturbations in the  $\phi$ direction are small and fluxes are generated based on the solution of the Riemann problem, this is unlikely. Secondly, conservative codes such as Athena are less likely to produce numerical instabilities. Thirdly, in many cases we see that the instability grows in a very well resolved
$\phi$ direction are small and fluxes are generated based on the solution of the Riemann problem, this is unlikely. Secondly, conservative codes such as Athena are less likely to produce numerical instabilities. Thirdly, in many cases we see that the instability grows in a very well resolved  $m=1$ mode, while numerical instabilities are usually generated on a grid scale (large
$m=1$ mode, while numerical instabilities are usually generated on a grid scale (large  $m$). Fourthly, there is a clear dependence of the instability on physical parameters, such as
$m$). Fourthly, there is a clear dependence of the instability on physical parameters, such as  $\gamma$, as shown in figure 7. There is no reason to find such dependence in numerical codes, especially those based on the solution of the Riemann problem.
$\gamma$, as shown in figure 7. There is no reason to find such dependence in numerical codes, especially those based on the solution of the Riemann problem.
7. Two-dimensional Cartesian simulations
In all the simulations above we used Athena in cylindrical geometry with first-order spatial reconstruction. Sometimes the physics of the problem necessitates using Cartesian numerical simulations. For example, when an instability becomes nonlinear and transitions to turbulence, we prefer to study such turbulence on a uniform grid to avoid numerical effects associated with the coordinate system's singular point. Despite extra errors, it is interesting to see how numerical codes in the Cartesian case will deal with our self-similar solutions, including the unstable solutions. Cartesian coordinates will introduce discretization errors, C4-symmetric or periodic with  ${\rm \pi} /2$ in azimuthal angle, i.e. harmonics of
${\rm \pi} /2$ in azimuthal angle, i.e. harmonics of  $m=4$, in addition, there may be truncation errors, not necessarily symmetric. Figure 8 shows
$m=4$, in addition, there may be truncation errors, not necessarily symmetric. Figure 8 shows  $\rho$ and
$\rho$ and  $B_\phi$ on a 2-D plain obtained in Athena++ simulation with different orders of spatial reconstruction. We initiated the problem with parameters
$B_\phi$ on a 2-D plain obtained in Athena++ simulation with different orders of spatial reconstruction. We initiated the problem with parameters  $\chi =2.6, \gamma =1.1, v_A/V_s=0.84, v_0/V_s=20$, zero rotation. Earlier in this study we empirically found this solution unstable to all
$\chi =2.6, \gamma =1.1, v_A/V_s=0.84, v_0/V_s=20$, zero rotation. Earlier in this study we empirically found this solution unstable to all  $m$ modes up to 10. We see from the figure that the instability seeded by the C4-symmetric discretization error is dominant with the first and second examples, but in the third, the instability was perhaps seeded by the truncation error as well. This is consistent with our cylindrical simulation where the discretization error did not produce azimuthal perturbations, nevertheless, the instability grew from the truncation error. In example four in figure 8 we used a more diffusive solver, the Harten–Lax-van Leer–Einfeldt (HLLE) solver, and this solver produced broadly sensible, but inaccurate solutions, especially for
$m$ modes up to 10. We see from the figure that the instability seeded by the C4-symmetric discretization error is dominant with the first and second examples, but in the third, the instability was perhaps seeded by the truncation error as well. This is consistent with our cylindrical simulation where the discretization error did not produce azimuthal perturbations, nevertheless, the instability grew from the truncation error. In example four in figure 8 we used a more diffusive solver, the Harten–Lax-van Leer–Einfeldt (HLLE) solver, and this solver produced broadly sensible, but inaccurate solutions, especially for  $B_\phi$. Finally, we found that the stabilizing code with viscosity and magnetic diffusivity and going to higher resolution provides accurate solutions. To test this, we performed a convergence study with diffusivities, scaling as grid scale, and observed convergence to a self-similar solution, albeit slow. On the bottom of figure 8 we show a similar simulation where we initially seeded
$B_\phi$. Finally, we found that the stabilizing code with viscosity and magnetic diffusivity and going to higher resolution provides accurate solutions. To test this, we performed a convergence study with diffusivities, scaling as grid scale, and observed convergence to a self-similar solution, albeit slow. On the bottom of figure 8 we show a similar simulation where we initially seeded  $m=7$ perturbation in the inflow and observed that it is dominant almost everywhere, except near the axis where the remaining
$m=7$ perturbation in the inflow and observed that it is dominant almost everywhere, except near the axis where the remaining  $m=4$ perturbation is still noticeable. Our interest in simulating accurate unstable solutions is primarily to determine if one can obtain a perturbed solution with the physically seeded perturbation. Collapsing Z-pinches are often unstable, however, one often encounters numerical studies where the instability is seeded by numerical error. In this case the post-instability evolution and transition to turbulence is code-dependent and, therefore, meaningless. In order to properly study disruption due to instability one has to seed perturbations explicitly and provide an accurate solution.
$m=4$ perturbation is still noticeable. Our interest in simulating accurate unstable solutions is primarily to determine if one can obtain a perturbed solution with the physically seeded perturbation. Collapsing Z-pinches are often unstable, however, one often encounters numerical studies where the instability is seeded by numerical error. In this case the post-instability evolution and transition to turbulence is code-dependent and, therefore, meaningless. In order to properly study disruption due to instability one has to seed perturbations explicitly and provide an accurate solution.

Figure 8. Two-dimensional Cartesian simulations of the same problem as presented on top of figure 2. Plots (a–d) show density from four simulations using different numerical schemes: HLLD with first-, second- and third-order spatial reconstructions and HLLE with a second-order spatial reconstruction. Plots (e–h) show  $B_\phi$ for the same schemes as (a–d). Plots (i–k) show higher resolution HLLE second-order simulations, stabilized with grid-scale viscosity and resistivity. In addition, an
$B_\phi$ for the same schemes as (a–d). Plots (i–k) show higher resolution HLLE second-order simulations, stabilized with grid-scale viscosity and resistivity. In addition, an  $m=7$ perturbation with a
$m=7$ perturbation with a  $10^{-2}$ amplitude was introduced in the
$10^{-2}$ amplitude was introduced in the  $B_\phi$ and
$B_\phi$ and  $B_r$ in the inflow.
$B_r$ in the inflow.
8. Discussion
The NRL Mag Noh is a family of self-similar solutions, meaning that the solution at any given time can be trivially rescaled to obtain a solution at some other time. This is especially convenient to estimate the rate of convergence to an ideal solution in the case of fixed-grid MHD codes. Indeed, a solution at some time  $t$ will have twice fewer grid points compared with the solution at
$t$ will have twice fewer grid points compared with the solution at  $2t$, which makes it possible to compare accuracy between
$2t$, which makes it possible to compare accuracy between  $t$ and
$t$ and  $2t$, instead of running two different simulations, as it is traditionally done.
$2t$, instead of running two different simulations, as it is traditionally done.
This paper generalized the previously found family of self-similar implosions (Velikovich et al. Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012) to the case with axial magnetic field and rotation. This makes our solution family five parametric. Compared with this previous paper, which provided a reference solution in a tabulated form, we provide codes to generate solutions with arbitrary parameters, verify these solutions with an MHD code and test their stability. A physical initial value problem will require seven parameters: two components of velocity, two components of the magnetic field, density, self-similar index and gas gamma. Two extra parameters correspond to the arbitrary choice of the shock velocity, as well as an arbitrary rescaling of magnetic field and density while keeping the Alfvén speed constant. These two exact symmetries of ideal MHD are the only degeneracies of the problem and to the best of our knowledge, the variations of the five main parameters of our problem will always produce different solutions that can not be rescaled into each other.
We expect the subset of the NRL Mag Noh problem with zero initial velocity to be especially useful to numerists due to the simplicity of its set-up, for example, stationary set-up is much easier in moving mesh codes and particle-in-cell (PIC) codes. At the same time, zero initial velocity is grounded in the reality of magnetized implosions, where plasma is always initially at rest and is driven by magnetic tension. A subset of our solutions has a singular azimuthal current at the origin. Engineering such a singularity in real implosions may help to create a hot spot in magnetically driven fusion experiments.
In Velikovich et al. (Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012) analytic expansion near the origin was used to start integration. In this paper we integrate from large to small radii and find a solution that stagnates at the origin by the bisection method. We found that understanding the appearance of the fast magnetosonic point is a critical element to achieve a regular solution. We use a sort of inverse logic to understand the property of the magnetosonic point – if the regular solution exists, reducing inflow velocity will make it stagnate before the origin, but will not produce a fast magnetosonic point. Therefore, if we encountered the fast magnetosonic point the inflow velocity is too high. Also, the inflow velocity is too high when the flow fails to stagnate at the origin. Bisecting between  $|v_{r0}|$ too high and too low should always produce a regular stagnating solution. Interestingly, this argument does not prove that such a solution is unique and this interesting question will be considered elsewhere. An alternative method to produce a solution with a minimal
$|v_{r0}|$ too high and too low should always produce a regular stagnating solution. Interestingly, this argument does not prove that such a solution is unique and this interesting question will be considered elsewhere. An alternative method to produce a solution with a minimal  $|v_{r0}|$, that we do not follow here, can be described as follows. In a range of
$|v_{r0}|$, that we do not follow here, can be described as follows. In a range of  $|v_{r0}|$ values there is always a self-similar solution with a shock, as long as we set a reflecting boundary at a certain radius
$|v_{r0}|$ values there is always a self-similar solution with a shock, as long as we set a reflecting boundary at a certain radius  $r_0$ (early stagnation). In order to obtain the solution that stagnates at the origin, i.e. obtain
$r_0$ (early stagnation). In order to obtain the solution that stagnates at the origin, i.e. obtain  $r_0=0$, we can slowly increase the inflow velocity
$r_0=0$, we can slowly increase the inflow velocity  $|v_{r0}|$ so that
$|v_{r0}|$ so that  $r_0$ goes to zero. In this case, by construction, we will obtain a unique solution with minimal
$r_0$ goes to zero. In this case, by construction, we will obtain a unique solution with minimal  $|v_{r0}|$.
$|v_{r0}|$.
We estimated the stability of our solutions by cylindrically symmetric simulations. It appears that there is a large parameter space where solutions are unstable to azimuthal perturbations. This can serve as groundwork for future theoretical work to uncover the nature of this instability. Recent theoretical studies of stability of the classic Noh problem,  $B_z=B_\phi =0,\ \chi =0$ with non-ideal equation of state (Velikovich et al. Reference Velikovich, Murakami, Taylor, Giuliani, Zalesak and Iwamoto2016; Huete et al. Reference Huete, Velikovich, Martinez-Ruiz and Calvo-Rivera2021) developed criteria for the D'yakov–Kontorovich instability. These can be applied for the
$B_z=B_\phi =0,\ \chi =0$ with non-ideal equation of state (Velikovich et al. Reference Velikovich, Murakami, Taylor, Giuliani, Zalesak and Iwamoto2016; Huete et al. Reference Huete, Velikovich, Martinez-Ruiz and Calvo-Rivera2021) developed criteria for the D'yakov–Kontorovich instability. These can be applied for the  $B_z\neq 0,\ B_\phi =0$ case as well by treating the
$B_z\neq 0,\ B_\phi =0$ case as well by treating the  $B_z$ field as an additional fluid with
$B_z$ field as an additional fluid with  $\gamma =2$. In this case the shock should be stable. Empirical study of a solution with
$\gamma =2$. In this case the shock should be stable. Empirical study of a solution with  $B_z=0,\ B_\phi \neq 0$ in Velikovich et al. (Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012) did not find any instability, but we consider it feasible that some of these may be unstable. Our current empirical study is in no way exhaustive and covers only a fraction of the parameter space.
$B_z=0,\ B_\phi \neq 0$ in Velikovich et al. (Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012) did not find any instability, but we consider it feasible that some of these may be unstable. Our current empirical study is in no way exhaustive and covers only a fraction of the parameter space.
Despite the fact that we do not fully understand the nature of the instability, it can be useful for theory and numerical research. While stable solutions traditionally played a role in estimating the accuracy of numerical codes, the unstable solutions are important to test the robustness of the codes and their ability to properly evaluate the development of the instability as well as its nonlinear evolution. It should be kept in mind that our stability set-up keeps the origin at rest, which may prevent some instabilities manifesting. In addition, possible divergence of perturbations near the origin may lead to a new continuum spectrum as in Sanz et al. (Reference Sanz, Bouquet, Michaut and Miniere2016).
Although we also produced solutions with a finite initial pressure, we omit those, because they are not qualitatively different from solutions with zero initial pressure. In fact, to significantly change the shape of the flow, one needs to start with relatively high plasma beta, which is not a typical scenario in magnetically driven HEDP plasmas. For completeness, our publicly released code can also produce solutions with finite initial pressure, making our solutions six parametric.
In this paper we limited ourselves to self-similar solutions of ideal MHD equations that have a constant shock speed. Our work, however, is not a formal mathematical exercise, it shows a complex nature of MHD stagnating solutions, rich in interesting physics. We hope that our family of MHD solutions will be used as a starting point in investigations of stagnation physics, shock physics and stability. Comparing our ideal MHD solutions with resistive-viscous cases, extended MHD, as well as PIC plasma may uncover more interesting physical effects, including induced rotation, instabilities, turbulence, particle acceleration, etc.
9. Data release
The code needed to reproduce figures in this paper is available at https://github.com/beresnyak/magnoh.
This release includes a code to produce self-similar solutions, to estimate accuracy, to verify solutions with Athena++, also it includes a code for Athena++ to study stability to azimuthal perturbations.
Acknowledgements
We would like to thank Dr S.T. Zalesak, who provided us with his preliminary results on Mag Noh stability. We are grateful to Dr C.L. Rousculp and Professor C.E. Seyler for their insightful comments.
Funding
A.B., A.L.V., J.L.G. and A.D. were supported by the Department of Energy/National Nuclear Security Administration under the Interagency Agreement DE-NA0003278. A.B. was partially supported by the NASA Astrophysics Theory grant 80HQTR18T0065.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Asymptotic expansions at small  $\eta$
$\eta$

Our (2.26)–(2.30) are written in terms of  $\ln \eta$, so both infinity and zero are singular points. We need to set the boundary condition for
$\ln \eta$, so both infinity and zero are singular points. We need to set the boundary condition for  $U$ at
$U$ at  $\eta =0$ however, and this boundary condition must be determined analytically. We have stagnating flow at the origin, i.e. linear velocity gradient in
$\eta =0$ however, and this boundary condition must be determined analytically. We have stagnating flow at the origin, i.e. linear velocity gradient in  $v_r$, so we can safely assume that
$v_r$, so we can safely assume that  $U$ is going to a negative constant as
$U$ is going to a negative constant as  $\eta \to 0$ that we designate as
$\eta \to 0$ that we designate as  $U_0$. Let us first determine dominant terms near zero in a simple qualitative fashion, expanding into more detailed calculations below.
$U_0$. Let us first determine dominant terms near zero in a simple qualitative fashion, expanding into more detailed calculations below.
First, from (2.32),  $A_\phi \sim \eta ^{-2}$, and subtracting (2.29) from (2.30), near the origin, we introduce positive
$A_\phi \sim \eta ^{-2}$, and subtracting (2.29) from (2.30), near the origin, we introduce positive  $\alpha$ as
$\alpha$ as
 \begin{equation} \frac{{\rm d} \ln A_z/A_\phi}{{\rm d} \ln \eta} = \frac {2U_0}{1-U_0} ={-}\alpha. \end{equation}
\begin{equation} \frac{{\rm d} \ln A_z/A_\phi}{{\rm d} \ln \eta} = \frac {2U_0}{1-U_0} ={-}\alpha. \end{equation}From ((2.31)–(2.34)), (A1) we get
 \begin{equation} A_\phi \sim \eta^{{-}2}, \quad A_z \sim W^2 \sim \eta^{{-}2-\alpha}, \quad N \sim \eta^{2\chi-(\chi+1)\alpha}, \quad S\sim \eta^{{-}2-(\gamma-1)\alpha}. \end{equation}
\begin{equation} A_\phi \sim \eta^{{-}2}, \quad A_z \sim W^2 \sim \eta^{{-}2-\alpha}, \quad N \sim \eta^{2\chi-(\chi+1)\alpha}, \quad S\sim \eta^{{-}2-(\gamma-1)\alpha}. \end{equation}As we see, since  $\alpha$ is positive,
$\alpha$ is positive,  $v_\phi =\eta W \sim \eta ^{-\alpha }$ is always singular on axis. Also, sufficiently close to
$v_\phi =\eta W \sim \eta ^{-\alpha }$ is always singular on axis. Also, sufficiently close to  $\eta =0$,
$\eta =0$,  $A_\phi < A_z$, while
$A_\phi < A_z$, while  $A_z$ and
$A_z$ and  $W^2$ are of the same order. With
$W^2$ are of the same order. With  $W^2/S \sim A_z/S \sim \eta ^{\alpha (\gamma -2)}$ there are two cases in which either
$W^2/S \sim A_z/S \sim \eta ^{\alpha (\gamma -2)}$ there are two cases in which either  $S$ dominates, or
$S$ dominates, or  $A_z$ and
$A_z$ and  $W^2$ dominate.
$W^2$ dominate.
For  $\gamma >2$, the dominant contribution to the main equation for
$\gamma >2$, the dominant contribution to the main equation for  $U$, (2.26), will come from terms with
$U$, (2.26), will come from terms with  $S$. Neglecting non-essential terms in (2.26) close to the origin, we can write
$S$. Neglecting non-essential terms in (2.26) close to the origin, we can write  $\textrm {d}U/\textrm {d}\ln \eta + 2\chi /\gamma +2U=0$, which only produces a regular solution for
$\textrm {d}U/\textrm {d}\ln \eta + 2\chi /\gamma +2U=0$, which only produces a regular solution for  $U$ if
$U$ if  $U_0=-\chi /\gamma$. In this case,
$U_0=-\chi /\gamma$. In this case,  $\alpha =2\chi /(\chi +\gamma )$ and the asymptotics of the physical quantities can be readily obtained as
$\alpha =2\chi /(\chi +\gamma )$ and the asymptotics of the physical quantities can be readily obtained as
 \begin{equation} \left.\begin{gathered} N \sim
\eta^{2\chi(\gamma-1)/(\chi+\gamma)}, \quad H_\phi \sim
\eta^{\chi(\gamma-1)/(\chi+\gamma)}, \quad H_z \sim
\eta^{\chi(\gamma-2)/(\chi+\gamma)},\notag\\ P \sim {\rm
const.} \quad ({\rm for}\ \gamma > 2). \end{gathered} \right\}
\end{equation}
\begin{equation} \left.\begin{gathered} N \sim
\eta^{2\chi(\gamma-1)/(\chi+\gamma)}, \quad H_\phi \sim
\eta^{\chi(\gamma-1)/(\chi+\gamma)}, \quad H_z \sim
\eta^{\chi(\gamma-2)/(\chi+\gamma)},\notag\\ P \sim {\rm
const.} \quad ({\rm for}\ \gamma > 2). \end{gathered} \right\}
\end{equation} A more interesting and more physically relevant case  $\gamma <2$ will see dominant contributions from
$\gamma <2$ will see dominant contributions from  $A_z$ and
$A_z$ and  $W^2$ (note that a special case with
$W^2$ (note that a special case with  $A_z=W=0$ had been considered in Velikovich et al. Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012). For future reference, we rewrite (2.26) using integral (2.34), designating the value of this integral
$A_z=W=0$ had been considered in Velikovich et al. Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012). For future reference, we rewrite (2.26) using integral (2.34), designating the value of this integral  $\lambda =W^2 A_z^{-1}(1-U)^{-2}=(v_{\phi 0}/v_{Az0})^2$,
$\lambda =W^2 A_z^{-1}(1-U)^{-2}=(v_{\phi 0}/v_{Az0})^2$,
 $$\begin{align} &(U+S+A_\phi+A_z-1) \frac{{\rm d} U}{{\rm d} \ln \eta}+U(U-1)+2 S\left(U+\frac{\chi}{\gamma}\right)+(\chi+1)A_\phi \nonumber\\ &\quad +\,(\chi+2U-\lambda(1-U)^2)A_z=0. \end{align}$$
$$\begin{align} &(U+S+A_\phi+A_z-1) \frac{{\rm d} U}{{\rm d} \ln \eta}+U(U-1)+2 S\left(U+\frac{\chi}{\gamma}\right)+(\chi+1)A_\phi \nonumber\\ &\quad +\,(\chi+2U-\lambda(1-U)^2)A_z=0. \end{align}$$ In the absence of rotation, for  $\lambda =0$, we get a regular solution for
$\lambda =0$, we get a regular solution for  $U$ if and only if
$U$ if and only if  $U_0=-\chi /2$. From this
$U_0=-\chi /2$. From this  $\alpha =2\chi /(\chi +2)$ and
$\alpha =2\chi /(\chi +2)$ and
 \begin{align} N \sim \eta^{2\chi/(\chi+2)}, \quad H_\phi \sim \eta^{\chi/(\chi+2)},\quad H_z \sim {\rm const.}, \quad P \sim \eta^{(2-\gamma)2\chi/(\chi+2)} \quad ({\rm for} \ \gamma\leq 2). \end{align}
\begin{align} N \sim \eta^{2\chi/(\chi+2)}, \quad H_\phi \sim \eta^{\chi/(\chi+2)},\quad H_z \sim {\rm const.}, \quad P \sim \eta^{(2-\gamma)2\chi/(\chi+2)} \quad ({\rm for} \ \gamma\leq 2). \end{align} In the presence of rotation  $U_0$ will be determined from the requirement that the coefficient for
$U_0$ will be determined from the requirement that the coefficient for  $A_z$ in (A4) vanishes, which is a quadratic equation
$A_z$ in (A4) vanishes, which is a quadratic equation  $\chi +2U_0=\lambda (1-U_0)^2$. One solution is always positive, which we can not use, the other is
$\chi +2U_0=\lambda (1-U_0)^2$. One solution is always positive, which we can not use, the other is
 \begin{equation} U_0=\frac{\lambda+1-\sqrt{1+\lambda(\chi+2)}}{\lambda}. \end{equation}
\begin{equation} U_0=\frac{\lambda+1-\sqrt{1+\lambda(\chi+2)}}{\lambda}. \end{equation}
In the limit of  $\lambda \to 0$ we recover the above result
$\lambda \to 0$ we recover the above result  $U_0=-\chi /2$. From the requirement that
$U_0=-\chi /2$. From the requirement that  $U_0<0$ we obtain
$U_0<0$ we obtain  $\lambda <\chi$. This limits initial rotation which may still produce a self-similar solution to
$\lambda <\chi$. This limits initial rotation which may still produce a self-similar solution to
 \begin{equation} v_{\phi 0} < \chi^{1/2} v_{Az0}. \end{equation}
\begin{equation} v_{\phi 0} < \chi^{1/2} v_{Az0}. \end{equation}
This means that in the absence of  $B_z$ we can only have rotating solutions for
$B_z$ we can only have rotating solutions for  $\gamma >2$.
$\gamma >2$.
For the purpose of obtaining a self-similar solution with our method, it is sufficient to have zeroth-order asymptotics for  $U$. Let us, however, calculate a next correction to our asymptotics above. To make the calculation compact, let us assume no rotation and
$U$. Let us, however, calculate a next correction to our asymptotics above. To make the calculation compact, let us assume no rotation and  $1<\gamma <2$. The calculation below can be repeated with the rotation term, by adopting a different
$1<\gamma <2$. The calculation below can be repeated with the rotation term, by adopting a different  $U_0$ or with a different
$U_0$ or with a different  $\gamma$, which will change the ordering of terms. For our choice of
$\gamma$, which will change the ordering of terms. For our choice of  $\gamma$, the dominant diverging term in (A4) will be
$\gamma$, the dominant diverging term in (A4) will be  $A_z$. Let us rewrite this equation rearranging terms of zeroth order and of lower order, assuming
$A_z$. Let us rewrite this equation rearranging terms of zeroth order and of lower order, assuming  $\lambda =0$,
$\lambda =0$,
 $$\begin{align} &\frac{{\rm d}U}{{\rm d}\ln\eta}+2U+\chi+ \frac{S}{A_z}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+2U+\frac{2\chi}{\gamma}\right)+ \frac{A_\phi}{A_z}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+\chi+1\right)\nonumber\\ &\quad + \frac{U-1}{A_z}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+U\right) =0. \end{align}$$
$$\begin{align} &\frac{{\rm d}U}{{\rm d}\ln\eta}+2U+\chi+ \frac{S}{A_z}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+2U+\frac{2\chi}{\gamma}\right)+ \frac{A_\phi}{A_z}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+\chi+1\right)\nonumber\\ &\quad + \frac{U-1}{A_z}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+U\right) =0. \end{align}$$
We will ignore the last term and note from (A2a–d) that  $S/A_z \sim \eta ^\sigma$ and
$S/A_z \sim \eta ^\sigma$ and  $A_\phi /A_z \sim \eta ^\omega$ where
$A_\phi /A_z \sim \eta ^\omega$ where
 \begin{equation} \sigma=\frac{2\chi(2-\gamma)}{\chi+2}, \quad \omega=\frac{2\chi}{\chi+2}. \end{equation}
\begin{equation} \sigma=\frac{2\chi(2-\gamma)}{\chi+2}, \quad \omega=\frac{2\chi}{\chi+2}. \end{equation}
Consequently, the two lowest-order terms in our expansions will be either  $\eta ^\sigma$ and
$\eta ^\sigma$ and  $\eta ^{2\sigma }$ (when
$\eta ^{2\sigma }$ (when  $3/2<\gamma <2$) or
$3/2<\gamma <2$) or  $\eta ^\sigma$ and
$\eta ^\sigma$ and  $\eta ^\omega$ (when
$\eta ^\omega$ (when  $1<\gamma <3/2$). Using (2.28-2.30) we can write
$1<\gamma <3/2$). Using (2.28-2.30) we can write
 \begin{gather} \frac{{\rm d}\ln(S/A_z)}{{\rm d}\ln\eta}={-}\frac{2-\gamma}{1-U}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+2U\right), \end{gather}
\begin{gather} \frac{{\rm d}\ln(S/A_z)}{{\rm d}\ln\eta}={-}\frac{2-\gamma}{1-U}\left(\frac{{\rm d}U}{{\rm d}\ln\eta}+2U\right), \end{gather} \begin{gather} \frac{{\rm d}\ln(A_\phi/A_z)}{{\rm d}\ln\eta}={-}\frac{2U}{1-U}. \end{gather}
\begin{gather} \frac{{\rm d}\ln(A_\phi/A_z)}{{\rm d}\ln\eta}={-}\frac{2U}{1-U}. \end{gather} We define  $\epsilon =\lim _{\eta \to 0} S/\eta ^\sigma A_z$ and seek
$\epsilon =\lim _{\eta \to 0} S/\eta ^\sigma A_z$ and seek  $S/A_z$ in the form of the power series
$S/A_z$ in the form of the power series
 \begin{equation} \frac{S}{A_z}=\epsilon \eta^\sigma(1+\epsilon S_1\eta^\sigma+\epsilon^2 S_2\eta^{2\sigma}+\ldots), \end{equation}
\begin{equation} \frac{S}{A_z}=\epsilon \eta^\sigma(1+\epsilon S_1\eta^\sigma+\epsilon^2 S_2\eta^{2\sigma}+\ldots), \end{equation}
and  $U$ in the form of the power series
$U$ in the form of the power series
 \begin{equation} U=U_0+\epsilon U_1 \eta^\sigma + \epsilon^2 U_2 \eta^{2\sigma}+\ldots. \end{equation}
\begin{equation} U=U_0+\epsilon U_1 \eta^\sigma + \epsilon^2 U_2 \eta^{2\sigma}+\ldots. \end{equation}
Neglecting terms with  $A_\phi /A_z$ and
$A_\phi /A_z$ and  $(U-1)/A_z$, (A8) can be used to obtain
$(U-1)/A_z$, (A8) can be used to obtain  $U_1$ and (A10) to obtain
$U_1$ and (A10) to obtain  $S_1$,
$S_1$,
 \begin{gather} U_1={-}\frac{\chi(\chi+2)(2-\gamma)}{2\gamma(3\chi-\gamma\chi+2)}, \end{gather}
\begin{gather} U_1={-}\frac{\chi(\chi+2)(2-\gamma)}{2\gamma(3\chi-\gamma\chi+2)}, \end{gather} \begin{gather} S_1=\frac{(2-\gamma)(2\chi-\gamma\chi+2)}{\gamma(3\chi-\gamma\chi+2)}. \end{gather}
\begin{gather} S_1=\frac{(2-\gamma)(2\chi-\gamma\chi+2)}{\gamma(3\chi-\gamma\chi+2)}. \end{gather}
The process can be repeated to calculate next-order terms. In a similar manner, the terms with  $\eta ^\omega$ are calculated from (A8) and (A11) using
$\eta ^\omega$ are calculated from (A8) and (A11) using  $\delta =\lim _{\eta \to 0} A_\phi /\eta ^\omega A_z$ and
$\delta =\lim _{\eta \to 0} A_\phi /\eta ^\omega A_z$ and  $U=U_0+\delta \bar U_1 \eta ^\omega$ to obtain
$U=U_0+\delta \bar U_1 \eta ^\omega$ to obtain
 \begin{equation} \bar U_1={-}\frac{(\chi+2)}{4}. \end{equation}
\begin{equation} \bar U_1={-}\frac{(\chi+2)}{4}. \end{equation}
Expansion of other quantities can be obtained from the expansion of  $U$ and (2.17), ((2.20)–(2.22)). For example, to the first order in
$U$ and (2.17), ((2.20)–(2.22)). For example, to the first order in  $\epsilon$,
$\epsilon$,
 \begin{gather} N \sim \eta^{{2\chi}/({\chi+2})}\left\{1- \frac{(4-\gamma)\chi+2}{\gamma[(3-\gamma)\chi+2]}\epsilon \eta^{\sigma}\right\}, \end{gather}
\begin{gather} N \sim \eta^{{2\chi}/({\chi+2})}\left\{1- \frac{(4-\gamma)\chi+2}{\gamma[(3-\gamma)\chi+2]}\epsilon \eta^{\sigma}\right\}, \end{gather} \begin{gather} P \sim \eta^{\sigma}\left\{1- \frac{(2+2\gamma-\gamma^2)\chi+2\gamma}{\gamma[(3-\gamma)\chi+2]}\epsilon \eta^{\sigma}\right\}, \end{gather}
\begin{gather} P \sim \eta^{\sigma}\left\{1- \frac{(2+2\gamma-\gamma^2)\chi+2\gamma}{\gamma[(3-\gamma)\chi+2]}\epsilon \eta^{\sigma}\right\}, \end{gather} \begin{gather} H_\phi \sim \eta^{{\chi}/({\chi+2})}\left\{1- \frac{(3-\gamma)\chi+1}{\gamma[(3-\gamma)\chi+2]}\epsilon \eta^{\sigma}\right\}, \end{gather}
\begin{gather} H_\phi \sim \eta^{{\chi}/({\chi+2})}\left\{1- \frac{(3-\gamma)\chi+1}{\gamma[(3-\gamma)\chi+2]}\epsilon \eta^{\sigma}\right\}, \end{gather} \begin{gather} H_z \sim 1-\frac{1}{\gamma} \epsilon \eta^{\sigma}. \end{gather}
\begin{gather} H_z \sim 1-\frac{1}{\gamma} \epsilon \eta^{\sigma}. \end{gather}
We also see that  $j_\phi \sim dH_z/d\eta \to 0$ at
$j_\phi \sim dH_z/d\eta \to 0$ at  $\eta \to 0$ if
$\eta \to 0$ if  $\sigma >1$. The same condition ensures that
$\sigma >1$. The same condition ensures that  $\boldsymbol {\nabla } P$ vanishes on axis, so the pressure has a smooth maximum, not a sharp spike. From (A9a,b) we find that this condition can be satisfied if
$\boldsymbol {\nabla } P$ vanishes on axis, so the pressure has a smooth maximum, not a sharp spike. From (A9a,b) we find that this condition can be satisfied if  $\gamma <3/2$, and
$\gamma <3/2$, and  $\chi$ is sufficiently large,
$\chi$ is sufficiently large,  $\chi >2/(3-2\gamma )$. In the general case with rotation we have
$\chi >2/(3-2\gamma )$. In the general case with rotation we have  $\sigma = 2|U_0|(2-\gamma )/(|U_0|+1)$ and the condition
$\sigma = 2|U_0|(2-\gamma )/(|U_0|+1)$ and the condition  $\sigma >1$ translates into
$\sigma >1$ translates into  $1/(3-2\gamma )<|U_0|<\chi /2$. We see that, when rotation is present, the regularity condition for
$1/(3-2\gamma )<|U_0|<\chi /2$. We see that, when rotation is present, the regularity condition for  $j_\phi$ is not easier to meet because the parameters
$j_\phi$ is not easier to meet because the parameters  $\gamma <3/2$ and
$\gamma <3/2$ and  $\chi$ still need to satisfy
$\chi$ still need to satisfy  $\chi >2/(3-2\gamma )$.
$\chi >2/(3-2\gamma )$.
Appendix B. Asymptotic expansions at large $\eta$

Using a change of variables  $\xi =1/\eta$ and introducing
$\xi =1/\eta$ and introducing  $\varPhi$,
$\varPhi$,
 \begin{equation} A_z=\frac{{v_{Az0}^2}\varPhi}{(1-U)^2}\xi^2, \end{equation}
\begin{equation} A_z=\frac{{v_{Az0}^2}\varPhi}{(1-U)^2}\xi^2, \end{equation}
such as  $\varPhi \to 1$ as
$\varPhi \to 1$ as  $\xi \to 0$, we transform (2.30) to
$\xi \to 0$, we transform (2.30) to
 \begin{equation} (U-1)\frac{{\rm d} \ln \varPhi}{{\rm d} \ln \xi} -2U =0. \end{equation}
\begin{equation} (U-1)\frac{{\rm d} \ln \varPhi}{{\rm d} \ln \xi} -2U =0. \end{equation}Likewise the integral (2.34) will be transformed into
 \begin{equation} W^2={v_{\phi 0}^2}\varPhi\xi^2. \end{equation}
\begin{equation} W^2={v_{\phi 0}^2}\varPhi\xi^2. \end{equation}
Substituting  $S=0$, (B1), (B3) and (2.32) into the equation of motion (2.26) we get
$S=0$, (B1), (B3) and (2.32) into the equation of motion (2.26) we get
 $$\begin{align} &-[(U-1)^3+({v_{Az0}^2}\varPhi+{v_{A\phi 0}^2})\xi^2]\frac{{\rm d}U}{{\rm d} \ln \xi} +\left\{[(2U+\chi){v_{Az0}^2}-(1-U)^2{v_{\phi 0}^2}]\varPhi\right.\nonumber\\ &\qquad\left.+(\chi+1){v_{A\phi 0}^2}\right\}\xi^2 +U(U-1)^3=0. \end{align}$$
$$\begin{align} &-[(U-1)^3+({v_{Az0}^2}\varPhi+{v_{A\phi 0}^2})\xi^2]\frac{{\rm d}U}{{\rm d} \ln \xi} +\left\{[(2U+\chi){v_{Az0}^2}-(1-U)^2{v_{\phi 0}^2}]\varPhi\right.\nonumber\\ &\qquad\left.+(\chi+1){v_{A\phi 0}^2}\right\}\xi^2 +U(U-1)^3=0. \end{align}$$
Let us introduce an asymptotic expansion at  $\xi \to 0$,
$\xi \to 0$,
 \begin{gather} U=u_1\xi+u_2\xi^2+u_3\xi^3+\ldots; \end{gather}
\begin{gather} U=u_1\xi+u_2\xi^2+u_3\xi^3+\ldots; \end{gather} \begin{gather} \varPhi=1+\phi_1\xi+\phi_2\xi^2+\ldots. \end{gather}
\begin{gather} \varPhi=1+\phi_1\xi+\phi_2\xi^2+\ldots. \end{gather}
Here  $u_1$ is our familiar
$u_1$ is our familiar  $v_{r0}$. Substituting the expansion into the equation for
$v_{r0}$. Substituting the expansion into the equation for  $\varPhi$, (B2), to the second order in
$\varPhi$, (B2), to the second order in  $\xi$ we obtain
$\xi$ we obtain
 \begin{equation} -(\phi_1+2u_1)\xi+({-}2\phi_2-2u_2+\phi_1^2+u_1\phi_1)\xi^2 =0. \end{equation}
\begin{equation} -(\phi_1+2u_1)\xi+({-}2\phi_2-2u_2+\phi_1^2+u_1\phi_1)\xi^2 =0. \end{equation}Equating both coefficients to zero we get
 $$\begin{gather} \phi_1={-}2u_1; \end{gather}$$
$$\begin{gather} \phi_1={-}2u_1; \end{gather}$$ $$\begin{gather}\phi_2={-}u_2+u_1^2. \end{gather}$$
$$\begin{gather}\phi_2={-}u_2+u_1^2. \end{gather}$$
Substituting the expansion into the equation for  $U$, (B4), we find that the first-order term cancels out, leaving no constraint for
$U$, (B4), we find that the first-order term cancels out, leaving no constraint for  $u_1$, which is our initial condition
$u_1$, which is our initial condition  $v_{r0}$, the remainder being
$v_{r0}$, the remainder being
 $$\begin{align} &\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2} -{v_{\phi 0}^2}+u_2\right]\xi^2 \nonumber\\ &\quad +\left[u_1({v_{Az0}^2}-{v_{A\phi 0}^2}+2{v_{\phi 0}^2}-3u_2)+(\chi{v_{Az0}^2}-{v_{\phi 0}^2})\phi_1+2u_3\right]\xi^3=0. \end{align}$$
$$\begin{align} &\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2} -{v_{\phi 0}^2}+u_2\right]\xi^2 \nonumber\\ &\quad +\left[u_1({v_{Az0}^2}-{v_{A\phi 0}^2}+2{v_{\phi 0}^2}-3u_2)+(\chi{v_{Az0}^2}-{v_{\phi 0}^2})\phi_1+2u_3\right]\xi^3=0. \end{align}$$
From this we express all the coefficients via  $v_{r0},v_{A\phi 0},v_{Az0}$ and
$v_{r0},v_{A\phi 0},v_{Az0}$ and  $v_{\phi 0}$,
$v_{\phi 0}$,
 $$\begin{gather} u_2={-}(\chi+1){v_{A\phi 0}^2}-\chi{v_{Az0}^2} +{v_{\phi 0}^2}, \end{gather}$$
$$\begin{gather} u_2={-}(\chi+1){v_{A\phi 0}^2}-\chi{v_{Az0}^2} +{v_{\phi 0}^2}, \end{gather}$$ $$\begin{gather}u_3={-}\tfrac12 v_{r0} \left[ (3\chi+2){v_{A\phi 0}^2}+(\chi+1){v_{Az0}^2} +{v_{\phi 0}^2}\right], \end{gather}$$
$$\begin{gather}u_3={-}\tfrac12 v_{r0} \left[ (3\chi+2){v_{A\phi 0}^2}+(\chi+1){v_{Az0}^2} +{v_{\phi 0}^2}\right], \end{gather}$$ $$\begin{gather}\phi_1={-}2 v_{r0}, \end{gather}$$
$$\begin{gather}\phi_1={-}2 v_{r0}, \end{gather}$$ $$\begin{gather}\phi_2= (\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2} +v_{r0}^2-{v_{\phi 0}^2}. \end{gather}$$
$$\begin{gather}\phi_2= (\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2} +v_{r0}^2-{v_{\phi 0}^2}. \end{gather}$$The asymptotic formula for self-similar velocity at large distance thereby is
 \begin{align} \eta
U&=v_{r0}-\frac{(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}
-{v_{\phi 0}^2}}{\eta}\notag\\ &\quad -\frac{\left[ (3\chi+2){v_{A\phi
0}^2}+(\chi+1){v_{Az0}^2} +{v_{\phi
0}^2}\right]v_{r0}}{2\eta^2}+\ldots.
\end{align}
\begin{align} \eta
U&=v_{r0}-\frac{(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}
-{v_{\phi 0}^2}}{\eta}\notag\\ &\quad -\frac{\left[ (3\chi+2){v_{A\phi
0}^2}+(\chi+1){v_{Az0}^2} +{v_{\phi
0}^2}\right]v_{r0}}{2\eta^2}+\ldots.
\end{align}
Without the axial magnetic field and rotation this reproduces the first three terms of the asymptotic formula in Velikovich et al. (Reference Velikovich, Giuliani, Zalesak, Thornhill and Gardiner2012). In case of zero initial velocity,  $v_r \sim 1/\eta +\textrm {const.}/\eta ^3+\ldots$ at large distances. The asymptotic formula for the azimuthal velocity stems from substituting ((B13)–(B14)) into (B3),
$v_r \sim 1/\eta +\textrm {const.}/\eta ^3+\ldots$ at large distances. The asymptotic formula for the azimuthal velocity stems from substituting ((B13)–(B14)) into (B3),
 \begin{equation} \eta W=v_{\phi 0} \left\{ 1-\frac1\eta v_{r0} +\frac1{2\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2} -{v_{\phi 0}^2}\right]+\ldots\right\}. \end{equation}
\begin{equation} \eta W=v_{\phi 0} \left\{ 1-\frac1\eta v_{r0} +\frac1{2\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2} -{v_{\phi 0}^2}\right]+\ldots\right\}. \end{equation}
The asymptotic expressions for other physical variables are derived by substituting the asymptotic expansion for  $U$ into (2.17), ((2.20)–(2.22)). These are
$U$ into (2.17), ((2.20)–(2.22)). These are
 \begin{align} N&\sim\eta^{2\chi}\left\{1-\frac{2\chi+1}\eta v_{r0} +\frac{\chi}{\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}+(2\chi+1)v_{r0}^2 -{v_{\phi 0}^2}\right]\right\}, \end{align}
\begin{align} N&\sim\eta^{2\chi}\left\{1-\frac{2\chi+1}\eta v_{r0} +\frac{\chi}{\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}+(2\chi+1)v_{r0}^2 -{v_{\phi 0}^2}\right]\right\}, \end{align} \begin{align} P&\sim\eta^{2\chi} \left\{1-\frac{2\chi+\gamma}\eta v_{r0} +\frac{\chi}{\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}-{v_{\phi 0}^2}\right] \right. \nonumber\\ &\quad +\left. \frac{(2\chi+\gamma)(2\chi+\gamma-1)}{2\eta^2}v_{r0}^2\right\}, \end{align}
\begin{align} P&\sim\eta^{2\chi} \left\{1-\frac{2\chi+\gamma}\eta v_{r0} +\frac{\chi}{\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}-{v_{\phi 0}^2}\right] \right. \nonumber\\ &\quad +\left. \frac{(2\chi+\gamma)(2\chi+\gamma-1)}{2\eta^2}v_{r0}^2\right\}, \end{align} \begin{align} H_\phi&\sim\eta^{\chi}\left\{1-\frac{\chi}\eta v_{r0} +\frac{\chi-1}{2\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}+\chi v_{r0}^2 -{v_{\phi 0}^2}\right]\right\}, \end{align}
\begin{align} H_\phi&\sim\eta^{\chi}\left\{1-\frac{\chi}\eta v_{r0} +\frac{\chi-1}{2\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}+\chi v_{r0}^2 -{v_{\phi 0}^2}\right]\right\}, \end{align} \begin{align} H_z&\sim\eta^{\chi}\left\{1-\frac{\chi+1}\eta v_{r0} +\frac{\chi}{2\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}+(\chi+1)v_{r0}^2 -{v_{\phi 0}^2}\right]\right\}. \end{align}
\begin{align} H_z&\sim\eta^{\chi}\left\{1-\frac{\chi+1}\eta v_{r0} +\frac{\chi}{2\eta^2}\left[(\chi+1){v_{A\phi 0}^2}+\chi{v_{Az0}^2}+(\chi+1)v_{r0}^2 -{v_{\phi 0}^2}\right]\right\}. \end{align}In the case of the plasma initially at rest, the asymptotic terms with  $1/\eta$ and
$1/\eta$ and  $1/\eta ^3$ are absent, leaving only the terms with
$1/\eta ^3$ are absent, leaving only the terms with  $1/\eta ^2$,
$1/\eta ^2$,  $1/\eta ^4$, etc.
$1/\eta ^4$, etc.
In figure 9 we showed the asymptotic limits plotted over our self-similar solution.

Figure 9. Self-similar solution (green) vs asymptotic expression for small (red) and large (blue)  $\eta$.
$\eta$.













































