1. Introduction
Action taken to avoid collision at sea may be considered to be a process in which an officer of the watch or master takes timely appropriate action or actions, in accordance with the rules for preventing collisions at sea, in such a way that ships pass at a safe distance. The International Regulations for Preventing Collisions at Sea (IMO, 1972) (the Rules) serve as guidelines for that process. However, over time, criticisms of the Rules have been raised over the inability to interpret certain terms or rules in a clear manner. This has resulted in different interpretations of the Rules by individuals or institutions, which ultimately has led to confusion regarding the understanding and application of the Rules. In such cases, subjective judgements based on the experiences of the officers or masters are usually adopted to resolve certain situations, and there is no strict adherence to the Rules. Therefore, it would be very useful to formalise the Rules for practical application, which would certainly increase the degree of safety of navigation. One of the terms mentioned in the Rules which requires clarification is a ‘close-quarters situation’. Most officers and masters base their understanding of a close-quarters situation on their own experience. However, precisely because seafarers, maritime experts and even legal experts have different interpretations and definitions of a close-quarters situation, it leads to unintended consequences. Therefore, one of the aims of the research is precisely to clarify the notion while analysing the considerations and defining a close-quarters situation as it is currently understood. The second objective is to perform a simulation on a navigational simulator, using ship models of different forms, to determine the minimum distance between approaching ships at which the ‘stand-on vessel’ could still avoid collision by its own manoeuvring with the ‘give-way vessel’ not acting in accordance with the Rules. The defined distance between approaching ships at which collision can still be avoided is used to determine the minimum distance between approaching ships and time to the closest point of approach of ships at which collision can still be avoided if immediate action to avoid collision is taken. The research results obtained using a navigational simulator can be used by officers of the watch or masters to know in advance the approximate limit values of the distance between ships and time to the collision at which they can no longer ‘wait’ for the other ship to take avoiding action, rather they must take immediate action so as to avoid collision. The information listed above is also needed by the vessel traffic service (VTS) operator and, in the future, by a person operating unmanned vessels from the shore and artificial intelligence which will independently take action to avoid collisions between ships.
2. About the term close-quarters situation
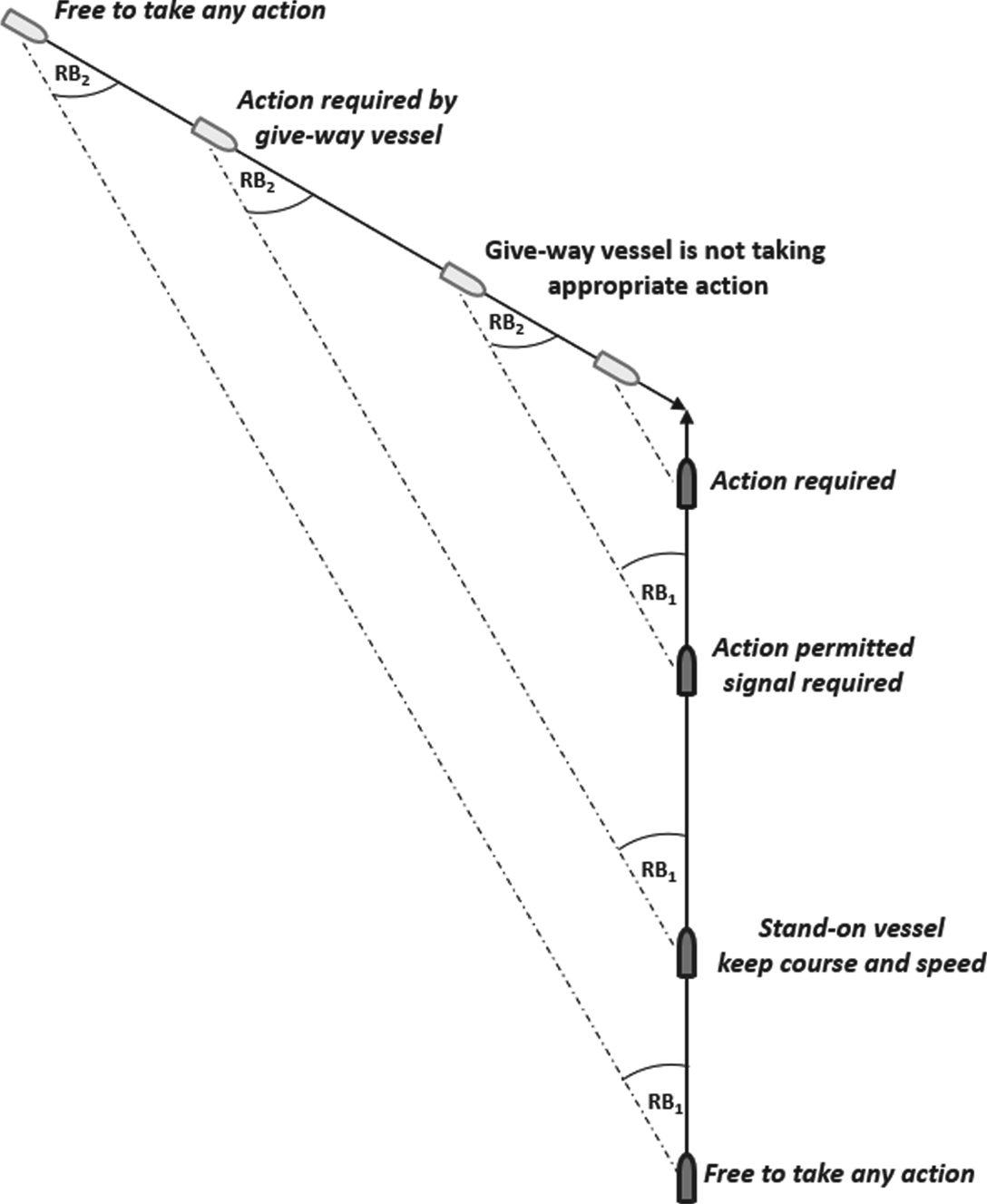
According to Tsai et al. (Reference Tsai, Chang and Chen2017), avoiding collision at sea is a process in which the navigator takes proper and timely action in accordance with the International Regulations for Preventing Collisions at Sea and after which ships under the risk of collision pass at a safe distance. However, when avoiding collision at sea, it is necessary to determine some limit values within which a collision avoidance manoeuvre must be taken. Of course, these values may not be the same for all ships, or even for the same ship under different conditions. Action to avoid a collision at sea should always be taken in a timely manner so that ships can pass at a safe distance and that in the event of some extraordinary circumstances, there is still sufficient time and space to avoid a collision. However, sometimes due to heavy maritime traffic or non-compliance with the Rules, ships pass at dangerous distances, thereby increasing the risk of collision. For ships passing at distances that cannot be considered safe, the term close-quarters situation is most commonly used. In the Rules, the term close-quarters situation is specified in Rule 8 (Action to avoid a collision) and in Rule 19 (Conduct of vessels in restricted visibility). Although very commonly used, when it comes to avoiding collisions at sea, the term is still not precisely defined and many authors have different interpretations and explanations. At conferences dedicated to the International Regulations for Preventing Collisions at Sea, efforts were made to define the term more precisely, but without success. Cockcroft and Lameijer (Reference Cockcroft and Lameijer2011) state that action to avoid a collision when two ships are in sight of each other and there is risk of collision can be divided into four stages. In order of sequence, these are the following stages: free manoeuvre, action required by the give-way vessel, action permitted by the stand-on vessel and action required (Figure 1).

Figure 1. Four stages of collision risk
Cockcroft and Lameijer (Reference Cockcroft and Lameijer2011) defined a close-quarters situation as the position when a collision can no longer be avoided solely by an action by the give-way vessel which is directed to keep out of the way of the other vessel, but also the stand-on vessel is required to take such action as will best aid to avoid collision. They state that a close-quarters situation is not defined by a value in nautical miles, although at the 1972 conference there were some efforts to define that value. Furthermore, they provide statements and explanations of court judgments and the interpretation of expert witnesses referring to close-quarters situations, e.g. the Grepa-Verena litigation, where the phrase ‘close-quarters situation’ is not clearly defined and requires further discussion. Similarly to Cockcroft and Lameijer, He et al. (Reference He, Jin, Huang, Xiong, Chen and Mou2017) presented a situation-identifying model and defined four distinct stages in the entire encounter process for autonomous collision avoidance, where appropriate collision avoiding actions must be taken according to different situations and stages. He et al. developed quantitative computing models for the first time-in-point of a close-quarters situation (FTCS) and the first time-in-point of immediate danger (FTID) for ship encounters in open sea under good weather. They includes ‘close-quarter’ and ‘immediate danger’ stages in the third stage of the defined scenario. Craig (Reference Craig2005) presented several interpretations and definitions of a close-quarters situation that have emerged from judgments of U.S. and British courts. He emphasises that the term ‘close-quarters situation’ is not defined by the Rules and points out that a delegates of the committee that adopted the Rules in 1972 concluded, after several discussions, that it was not possible to define the distance at which a close-quarters situation would be considered. With a few exceptions, the courts were generally reluctant in their judgments to provide anything other than general guidance regarding the determination of a close-quarters situation. One of the definitions of a close-quarters situation well known in case law is that the phrase refers to any situation where two ships will not pass at safe distance based on their courses and speeds. However, the above definition relies on another undefined phrase in the Rules, which is safe distance, and as such is not very helpful. Cockcroft and Lameijer (Reference Cockcroft and Lameijer2011) in their book discuss the term ‘close-quarters situation’, where it first appears in the Rules, at Rule 8 (c). They state that the distance at which a close-quarters situation first applies will depend upon a number of factors, including visibility. They further state that in the open sea, distances of the order of 2 to 3 nm are usually considered as the outer limits in restricted visibility but smaller distances, probably of the order of 1 nm, would probably be accepted for vessels in sight of one another. Considering a close-quarters situation in which collision avoidance is no longer controlled by a single ship, Cahill (Reference Cahill1983) proposed the definition of a close-quarters situation when ships are in sight of one another: ‘We offer here a provisional definition of “close-quarters” as that area around a ship where a collision with an approaching vessel could not be avoided by the action of the approached vessel alone if the approaching vessel made a major, sudden and unexpected course change.’ Lloyd's Da Ye ship collision report (1993) states that not every close-quarters situation necessarily means collision risk and emphasises that there is no boundary in distinguishing between the notions of a close-quarters situation and collision risk. The English Admiralty Court made it very clear in the case of the ship Maloja II that timely action is necessary to avoid a close-quarters situation: to ensure that, whenever possible, ships do not come into a close-quarters situation where there is a risk of collision and in which a decision must be made in a very short time, without enough time to make the right decision. Mankabady (Reference Mankabady1987) also confirmed that it is very difficult to define a close-quarters situation. He further explained that its value depends on several factors and defines a close-quarters situation as a collision that can no longer be avoided by manoeuvring a single ship with significant alteration of course. In 1970, the British Merchant Navy Association published an article in its journal concerning a close-quarters situation, which referred to a court judgment stating: ‘ … in the case of the size of the ships we have here, the close-quarters situation means a fairly long distance and I would dare to think that distance is measurable in miles rather than in yards’. In 1981, the German government sent letter 26/4/2 to the International Maritime Organization (IMO) stating that the ‘close-quarters situation can only be avoided if the navigator is aware of the shape and size of the waters in which he navigates and in which intends to carry out an avoidance action …’. Sjekavica and Kacic (Reference Sjekavica and Kacic1982) state that a close-quarters situation occurs when ships come so close to each other, to some boundary proximity, that they are left with very little time and manoeuvring space to undertake a successful action to avoid a collision. These authors do not present any numerical values, they merely emphasise that the distance between ships in a close-quarters situation is not easy to define because its meaning is conditioned by the circumstances in which it is applied. They consider that the inter-position of ships is defined by relative speed, relative direction and distance between them. They also state that, according to maritime practice, the term indicates an imminent risk of collision due to the position and proximity of ships. A very interesting study of a close-quarters situation was made by the Faculty of Law and Political Science in Nantes (Cornillou, Reference Cornillou2014), when, at the request of the French government, research was undertaken to increase the safety of navigation in Ushant and to facilitate monitoring and safety of navigation controlled by the VTS Centre Ushant. In defining a close-quarters situation, the report associates the phrase with near miss, as a series of events or occasions between ships that may cause a collision. In the period from January 2008 to September 2013 (68 months), 120 cases of close-quarters situation were reported by ships and an analysis of a close-quarters situation was made on the basis of the data obtained. Reference data were taken for cases where the closest point of approach (CPA) was up to 0⋅5 nm, while the time to the closest point of approach (TCPA) was up to 10 min. Bakdi et al. (Reference Bakdi, Glad, Vanem and Engelhardtsen2019) introduced a risk identification methodology to define the minimum distance to avoid accidents in a navigation scenario, using the concept of blocking areas (four areas) to define a vessel safety domain. Similar to some other authors, they stated that in a close-quarters situation, actions taken by only one vessel will not be enough to avoid the risk of collision.
2.1 Review of explanation of the term close-quarters situation
Based on the above literature and the various authors’ opinions on the meaning of the term close-quarters situation, it can be concluded that some authors merely debate over the term, citing all factors that may influence its definition without giving their own view of the term. A close-quarters situation, in any case, represents some distance between ships, so it should primarily be determined by defining the distance in metres, cables, or nautical miles. Therefore, the result of the analysis of all the factors mentioned by the authors influencing the determination of the close-quarters situation should be a certain distance expressed in a distance unit. However, such information is missing from these sources. Other authors are more specific in their definitions, which differ slightly, but their meaning is practically the same. They define the term close-quarters situation as the distance between ships in which a collision cannot be avoided by a single ship, but both ships must take action to avoid a collision. This definition may be acceptable from the legal point of view, but it is totally unacceptable to the person navigating the ship. Specifically, the question is why the ship even found itself in such a position. The most likely answer is because one of the ships did not perform all actions to avoid a collision. In the first place, the obligation to avoid a collision refers to the give-way vessel which, for some reason, did not take the action in time. In accordance with Rule 17: (a)(ii) of the Rules, the vessel required to keep its course and speed shall take such action as will best aid to avoid collision as soon as it becomes apparent to it that the other vessel is not taking sufficient or no action to avoid a collision. So, before a close-quarters situation occurs, the stand-on vessel can take action to avoid a collision, thereby eliminating entry into a close-quarters situation, thus avoiding a possible collision. It is well known that the person navigating the ship must stand watch in accordance with the ordinary practice of seamen. The question is whether the ordinary practice of seamen can be considered if the person navigating the ship allows the ship to enter a close-quarters situation. As noted above, although there may be various reasons that ships find themselves in close-quarters situations, the most frequent one being failure to take an appropriate action to avoid a collision by the give-way vessel. Failure to take appropriate action to avoid a collision most often represents a breach of conduct, which is not in accordance with the ordinary practice of seamen.
In accordance with Rule 17 (b) of the Rules, it has been stated that the stand-on vessel, when finding itself in a close-quarters situation, must take a collision avoidance action to avoid collision. The question now arises whether a seaman who behaves in accordance with the ordinary practice of seamen, upon noticing that the give-way vessel is not taking appropriate action to avoid a collision, would wait so long to reach such a position with the give-way vessel where collision would be avoided only if their own ship and the other ship were to take appropriate actions. Had the person navigating the give-way vessel acted in accordance with the ordinary practice of seamen, they would have already taken appropriate action in time and passed the other vessel at a safe distance. Thus, the definition by some authors of a close-quarters situation as the distance between ships when a collision cannot be avoided by one ship alone, but both ships must take appropriate action to avoid a collision, is simply not acceptable as behaviour in accordance with the ordinary practice of seamen. For a seaman who behaves in accordance with the ordinary practice of seamen, it would be acceptable to define a close-quarters situation as the smallest distance between ships when a collision is still avoidable if only one ship takes appropriate action to avoid it. In this type of avoiding action, it should be emphasised that the minimum distance between ships will not result in passing at a safe distance, but will still allow collision to be avoided. In maritime practice, such events are often defined as ‘near miss’. If such a definition is accepted, then it would be easier to define the position between the ships which represents a close-quarters situation, as well as the value of that distance. In this case, the most important factors are the turning circle characteristic, then the relative position or movements of both ships, and the influence of external factors such as wind, sea current, waves, sea depth etc., on one ship, which could then change its manoeuvrability characteristics.
3. Preparation for research
In accordance with the definition previously proposed by the authors of this paper of the term close-quarters situation as the smallest distance between ships when a collision is still avoidable if only one ship takes appropriate action to avoid it, the following sections define scenarios that are subsequently simulated on the navigational simulator to obtain the shortest distance between ships when the stand-on vessel can take an action to avoid a collision because the other ship obliged to do so for some reason does not. Similar research was conducted by Krata and Montewka (Reference Krata and Montewka2015) who attempted to define a critical distance between two encountering ships. They defined critical distance as the shortest distance between two ships on collision courses at which effective evasive last minute actions can be successfully taken by one vessel alone (stand-on vessel), in the situation where the give-way vessel does not take an action. The dimension of critical distance/area they compared with dimensions of various ship domains found in the literature. Work of Krata and Montewka inspired research conducted by Szlapczynski et al. (Reference Szlapczynski, Krata and Szlapczynska2018) who investigated situations when one ship is the stand-on vessel and the give-way vessel does not react in due time. In such cases, according to the Rules, Szlapczynski et al. investigated when the stand-on vessel will start a manoeuvre, depending on the desired separation, which they represent by a decentralised elliptic domain. Baldauf et al. (Reference Baldauf, Mehdi, Fischer and Gluch2017) compared the collision avoidance process between two ships and the collision avoidance process between two aircraft. They clearly explained that the CPA and TCPA alarms are not sufficient because they warn of a possible collision, while nothing else warns the officer if they ignore the CPA and TCPA alarms, which is the case in aviation. Therefore, Baldauf et al. proposed one more collision alarm on a ship, which they call the ‘last line of defence’ (LLoD) as it is used in airborne collision avoidance systems (ACAS) and which may be applied as the ‘ultimate action alarm’. The LLoD alarm corresponds to the moment when the amount of remaining options for manoeuvres to successfully avoid a collision is getting close to a critical minimum. The LLoD alarm suggested by Baldauf et al. (2017) has the same meaning as the goal of this study, which is to show the smallest distance between two ships when a collision can still be avoided by only one ship taking the avoiding action. In the simulations conducted in that study, the time for initiating a manoeuvre to realise the passing distance was determined to be 3 cables from ship's hull to ship's hull in one scenario and 2⋅5 cables in another. Simulations were performed assuming a rudder angle of 30°. The authors did not provide an explanation of how they selected the aforementioned passing distance, but emphasise that, ‘The minimum passing distance needs to be defined and shall always be greater than the hydrodynamic safe passing distance.’ The purpose of the simulations in our research was to show at what distance between the two ships on collision courses, and the time to the collision, the avoidance action should be taken so that the ships would pass at a minimum distance.
Ships passing each other while taking action to avoid collision at sea can result in three cases. The first is that the ships pass at a safe distance; the second is when ships pass at a distance less than safe distance, a distance that is very small, but nevertheless no contact between the ships occurs; and the third case is when there is contact between the ships, which means that there is a collision. Without debating about the value of safe distance, a close-quarters situation can certainly be considered to be a distance between passing ships that is less than safe distance, but again such that no collision occurs. Thus, during the simulation, actions taken to avoid a collision were taken at a distance that would allow passing the other vessel at a distance of 100 m. This distance is certainly not the distance one would like to experience when navigating a ship as a result of collision avoidance action. Such a passing distance is common when passing in narrow channels, two-way waterways, entrances to ports, anchorages, etc., but this is not the topic of the research. However, as the aim of this study was to obtain the shortest distance at which one of the ships could take (start) the action to avoid a collision, the passing distance between ships was intentionally fixed at 100 m. Certainly, determining the minimum passing distance between ships requires further research, which is also emphasised in Baldauf et al. (2017). For the purposes of this research, the passing distance between ships of 100 m was determined as the minimum passing distance value at which hydrodynamic interaction between two overtaking vessels will not lead to contact between the ship's hulls. Although a certain force of interaction may occur, it will not cause the hulls of ships to touch. As it is known that the force of interaction between ships has the greatest effect on overtaking ships, it can be concluded that the minimum passing distance defined for overtaking is considered acceptable for head-on and crossing situations as well. The resulting minimum passing distance between ships actually represents CPA at the moment of passing. Theoretically, if the conditions as set out in the simulations (no shallow water, no wind, waves, or sea currents) prevail, then CPA at the moment of passing would be approximately 100 m in reality. In the event of external influences that change the ship's manoeuvrability, CPA at the moment of passing would normally no longer be 100 m (could be more or less). To define CPA at the moment of passing, which could be considered safe in such circumstances, the impact of the above external factors and the errors of the devices determining the distance from other ships (primarily the radar) should be considered in such cases. Due to the scope of possible combinations, such scenarios are not predicted in this research, but will be the subject of future research. A CPA of 100 m at the moment of passing can also be considered as the worst-case scenario. Similarly, Szlapczynski et al. (Reference Szlapczynski, Krata and Szlapczynska2018), referring to the works of Krata and Montewka (Reference Krata and Montewka2015) and Krata et al. (Reference Krata, Montewka and Hinz2016), state that the authors in their works assumed ‘a near-zero ship separation’ which can be understood as the worst-case scenario listed in this paper. The simulations were performed on the latest generation TRANSAS NTRPO 5000 navigational simulator installed at the Faculty of Maritime Studies in Rijeka. Today, the use of sophisticated simulators/computers has become quite common. Many researchers use simulators that offer advanced models for the prediction of ship manoeuvres (Baldauf et al., Reference Baldauf, Mehdi, Deeb, UweSchröder-Hinrichs, Benedict, Krüger, Fischer and Gluch2015).
3.1 Ship models used in simulations
Due to the large number of different types and characteristics of ships, in order to reduce the number of possible combinations (scenarios), a certain rationalisation of the number of models was made, while keeping them representative of the type of ship. In determining the scenario, it was necessary to vary the type, size, loading condition and speed of the ship. The rationalisation was primarily made by the choice of ships according to the ship's block coefficient Cb. According to the selected criterion, the ships were divided into two categories where ships with block coefficient lower than 0⋅7 (Cb < 0⋅7) were considered as fine-form ships while ships with block coefficient larger than 0⋅7 (Cb > 0⋅7) were considered to be full-form ships. Due to the amount of the results obtained, only results obtained for fine-form ships will be shown below. The group of ships with a Cb < 0⋅7 includes container ships and the characteristics of the ships used in the simulations are shown in Table 1.
Table 1. Type and size of the selected fine-form ships, Cb < 0⋅7

The ship that takes action to avoid a collision is defined as Own Ship, while the ship it encounters or the ship it wants to avoid is the Target Ship. Own Ship was a container ship 365⋅5 m in length, 51⋅65 m in breadth, 16⋅00 m draft and a speed of 25⋅4 knots. Figure 2 shows the turning circle for Own Ship using ‘Hard to starboard’ rudder.

Figure 2. Turning circle for Own Ship using ‘Hard to starboard’ rudder. cbls = cables
One Target Ship was a Panamax bulk carrier 230 m in length, 32 m in breadth and 12 m draft, and the second Target Ship was container vessel 365⋅5 m in length, 51⋅65 m in breadth and 16 m draft. Target Ships were chosen according to speed. In order to obtain concrete collision avoidance data, the slower Target Ship (Panamax) sailed at 14⋅8 knots, while the faster Target Ship (container) sailed at 25⋅4 knots. These speeds were chosen because the average speed of most merchant ships ranges from 13 to 15 knots, but today there is an increasing number of high-speed ships on the maritime market such as container ships, passenger ships, liquefied gas vessels, refrigerated cargo ships, ro-ro passenger ships, high-speed craft etc.
3.2 Scenario development
In determining the distance and the time when an action to avoid a collision was required and allow ships to pass at a distance of 100 m, external influences are not taken into account and the only force that occurred is the interaction force between the ships. The most relevant information to the person navigating the ship in the scenarios described is the current distance from the other ship (measured by radar) and TCPA, determined using radar target tracking facilities. The simulations were started by setting the value of the CPA to 0 m, which means that the ships were sailing so that the risk of collision existed and a collision would surely occur if none of the ships took the avoidance action. TCPA was determined by radar, which in the initial part of the simulation represented the time until the moment of collision. Due to the change of direction of the Own Ship to avoid a collision and indirectly the change of speed due to turning of the ship, it is normal that the initial TCPA by the moment of collision differs from the TCPA at a distance of 100 m. The above did not affect the quality of the simulations at all, since the information required by the person navigating the ship was, in fact, the minimum time to collision in order to take action to avoid a collision in a timely manner. The distance between ships at the time of commencement of the action to avoid collision is the actual distance between the ships and not the distance to the point of collision. A sea area with depth of 500 m was selected for the simulation area, so that there would be no influence of the depth of the sea on the ships’ manoeuvrability. Own Ship was simulated in fully-loaded and ballast condition, resulting in a smaller speed change, while for the Target Ship two speeds were simulated: 14⋅8 knots (slower ship) and 25⋅4 knots (faster ship). The simulations were performed in such a way that the ships were placed in an initial position with CPA = 0 m. As we wanted to avoid a collision at the shortest passing distance (in simulations fixed at 100 m), the simulations were required to give the mutual distance (minimum) between the ships when the avoidance action should be started by manoeuvring only by Own Ship, in order to avoid the collision. The manoeuvre of setting the rudder on the Own Ship ‘Hard to starboard’ was chosen because it is known that changing direction on large displacement ships is far more efficient than changing speed (increasing or decreasing). Also, the largest rudder deflection was chosen, which has some limitations for a particular type of ships, but such cases may be considered as extraordinary circumstances when any action is allowed to avoid an even greater accident. Figure 3 shows an excerpt from the navigational simulator at the moment when Own Ship is passing at the CPA of 100 m to the Target Ship.

Figure 3. Ships passing at CPA of 100 m
The reason for selecting only rudder deflection for collision avoidance is because collision avoidance by changing direction has a greater and faster effect than speed change for all full displacement vessels. Based on the selected simulated conditions, four head-on situation simulations and 24 crossing situation simulations for each individual ship were conducted. In the head-on situation, the course difference (ΔCRS) between the ships was 180°, while the selected scenarios in the crossing situation included a course difference of 45°, 90°, 115°, 135°, 150° and 165°. In the crossing situation scenario, Own Ship represented the stand-on ship, while Target Ship represented the give-way ship but, as explained earlier, the latter did not take any action to avoid a collision.
4. Research results
Due to the amount of survey data, only the results obtained for a single 365⋅50 m long container vessel will be shown below. Schematic representation of the starting positions of the ships for which simulations were performed is shown in Figures 4 and 5.

Figure 4. Schematic representation of conducted simulation for head-on situation

Figure 5. Schematic representations of conducted simulations for crossing situations
Figures 6 and 7 show the distances at which a 365⋅50 m long fully-loaded container ship began to alter course when approaching a faster (25⋅4 knots) or slower (14⋅8 knots) Target Ship. The results obtained showed that in a crossing situation, the minimum distance between ships at which Own Ship initiated manoeuvring action was approximately 0⋅4 M (M is used in the paper as an abbreviation for nautical mile) when meeting a slower ship and approximately 0⋅5 M when meeting a faster ship, with the difference in courses of 45°. In the event of a crossing situation, the minimum distances between ships at which Own Ship commenced manoeuvring action increased more than twice or three times when the course differences ranged from 115° to 150°. In these cases, the minimum distance between ships at which Own Ship commenced manoeuvring action was approximately 1⋅3 M when meeting a slower ship and approximately 1⋅7 M when meeting a faster ship. When ships met in a head-on situation, the minimum distance between ships at which Own Ship commenced manoeuvring action when meeting a slower ship was approximately 1⋅0 M and when meeting a faster ship approximately 1⋅3 M.

Figure 6. Distances at which the container ship began to alter course for different scenarios expressed as a function of the difference in headings between ships (ΔCRS)
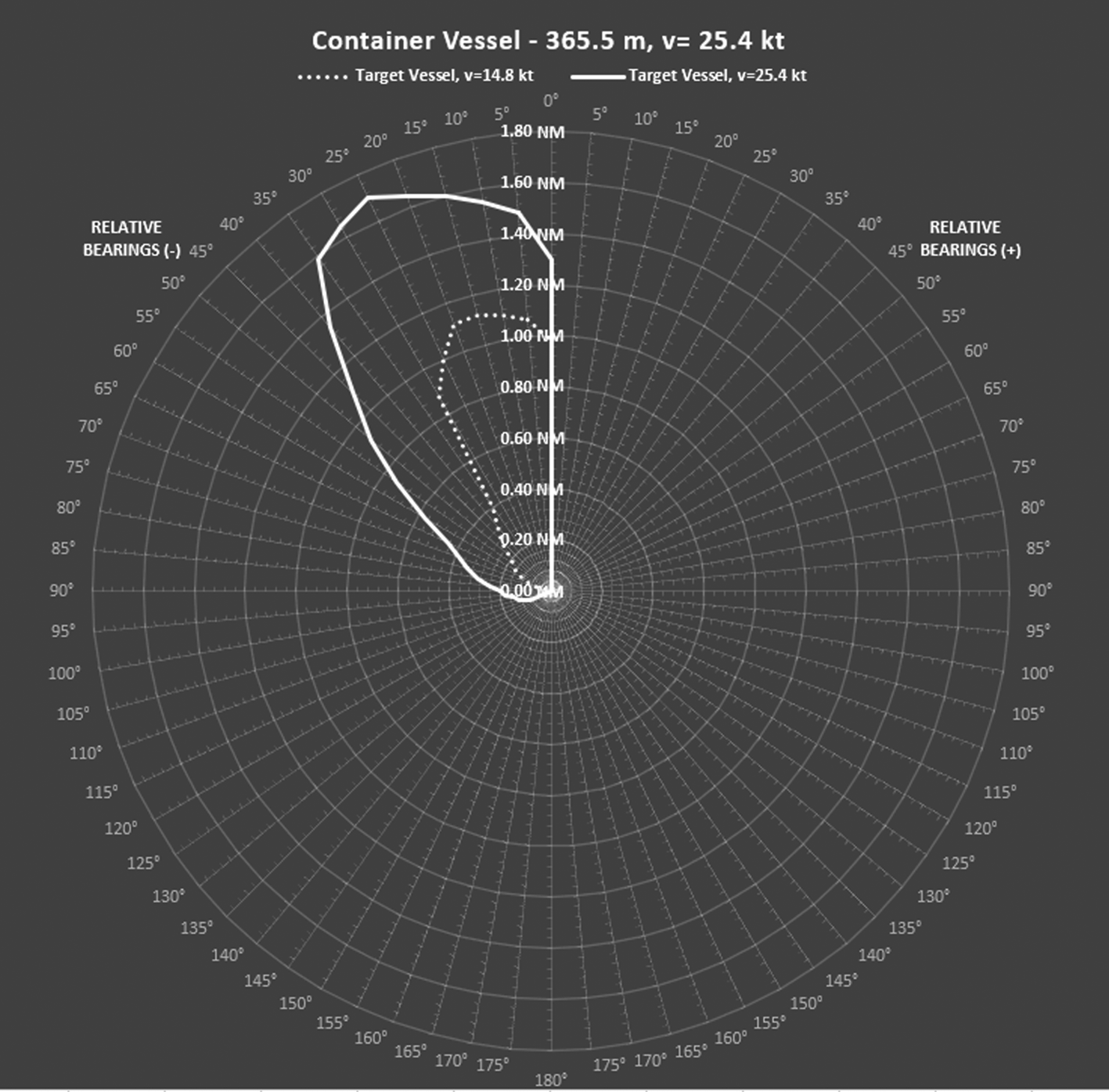
Figure 7. Distances at which the container ship began to alter course for different scenarios expressed as a function of the relative bearings
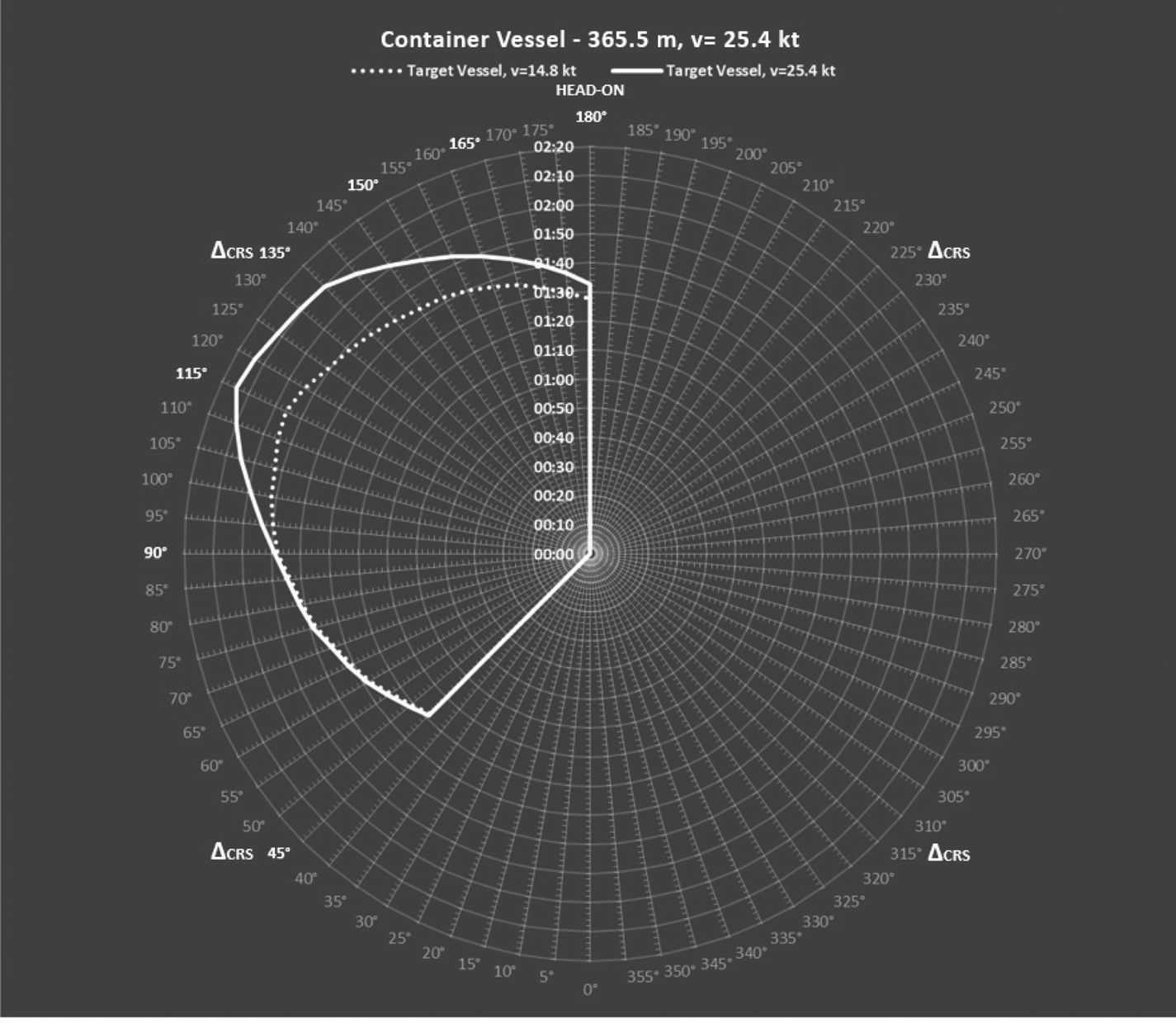
Figures 8 and 9 show the time to collision at which a 365⋅50 m long fully-loaded container ship began to alter course with the faster (25⋅4 knots) or the slower (14⋅8 knots) Target Ship.

Figure 8. Time at which container ship began to alter course for different scenarios expressed as a function of the difference in headings between ships (ΔCRS)

Figure 9. Time at which container ship began to alter course for different scenarios expressed as a function of the relative bearings
The time to collision at which Own Ship commenced the manoeuvring action is very little affected by the speed of the Target Ship and the time differences, measured in seconds, can be considered negligible. In a crossing situation, when the course difference is 45°, the time to the moment of the collision at which Own Ship commenced manoeuvring action was approximately 1′18″. The longest time to collision at which Own Ship commenced manoeuvring action occurred when the course differences ranged from 115° to 135° and was approximately 2′. When ships met in a head-on situation, the shortest period to the moment of the collision when Own Ship commenced manoeuvring action was approximately 1′30″.
5. Discussion
Based on the obtained simulation results, it can be concluded that some of the results were in accordance with the procedures of the officers on the bridge that they apply in practice, while some results may raise doubts in the officer as to whether the decision they will make based on the results is in accordance with the Rules or not. It is clear that the Rules cannot cover all possible situations of risk of collision at sea and it is known that Rule 2 covers such cases when referring to special circumstances. However, the Rules should be complied with where the special circumstances of the case would be used as rarely as possible. Analysing the minimum distances at which Own Ship must start manoeuvring to avoid a collision with the Target Ship and pass at a distance of 100 m, it is concluded that the distance depends on the characteristics of the turning circle of the Own Ship, the course difference between the two ships and the relative approach speed of the ships. Ships of the same form, but shorter and consequently with a smaller turning circle diameter, can start avoiding collisions with another ship at shorter distances, still passing another ship at a distance of 100 m (the figure with the results is omitted due to the amount of material). The least favourable cases of approaching ships, implying the greatest distance at which to start avoiding collisions, occur when the difference in course between ships is from 90° to 180°. The greatest distances occur when the course difference between ships is from 115° to 150°. Along with these course differences, an additional problem is choosing an avoidance manoeuvre. Specifically, in order to avoid crossing ahead of the Target Ship, it is necessary to avoid it with Own Ship by making a full turn over the starboard side. In this case, for a container ship of 365⋅50 m in length when the course difference is 135° and the Target Ship speed is 14⋅8 knots, the container ship must start avoiding the Target Ship at a distance of approximately 1⋅75 M. For slightly higher relative speeds between ships, in the mentioned course crossings, the distance between ships exceeds 2 M when it is necessary to start avoiding collisions very quickly. In such cases, the question arises whether collision avoidance at these relatively long distances by the stand-on ship is a violation of the Rules. The correct answer depends on the actual situation. For smaller ships that can take safe collision avoidance actions over shorter distances, collision avoidance actions over longer distances for a stand-on ship could be considered a violation of the Rules. On the other hand, for large ships which, in accordance with their manoeuvring characteristics, must take collision avoidance actions over longer distances, such action may be considered to have been taken in accordance with the Rules.
For simulations where the course difference was from 115° to 165°, the Own Ship's manoeuvres were undertaken by turning to starboard, intersecting the Target Ship's trajectory and passing at a minimum distance of 100 m. It should be emphasised here that 100 m was CPA, and that bow crossing was slightly higher. This way of avoidance reduced the distance between ships when the avoidance was to begin in order to enter the third stage of avoidance, when the stand-on ship may take action to avoid a collision. As mentioned earlier, such a case of intersection along the bow of the Target Ship can be considered as the worst case.
By simulating scenarios in which the relative approach speed between ships was higher, it was expected to start the collision avoidance manoeuvre with the other ship at a greater distance. By analysing TCPA, when a ship must start avoiding a collision with another ship to avoid a collision and pass the other ship at a distance of 100 m, the distance was found to depend on the characteristics of the turning circle of the Own Ship, the difference of courses between the two ships and the speed of the Own Ship. The shape of the curve, the time to the closest point of the collision when the ship must start collision avoidance and the minimum distance curve at which the ship must begin action to avoid collision are similar, which was as expected. In analysing TCPA at which a ship must begin collision avoidance with another ship, it should be noted that it does not change significantly with the change of speed of the Target Ship, which is shown on Figure 8. Thus, although the relative speed between the ships changes, when the speed of the Target Ship is different, there is no significant change in TCPA at which the Own Ship must begin to avoid collision with the other ship. This result is also logical because the action to avoid a collision is taken only by the Own Ship and the only value which changes is the distance between the ships when the action to avoid a collision should begin. For the Target Ship approaching at a higher speed, this distance will be greater, and for the Target Ship approaching at a lower speed, the distance will be smaller, while TCPA when the Own Ship has to start action to avoid a collision with the other ship will be very similar. Finally, it might be asked why no avoidance action was taken by the Own Ship turning to port during avoidance when the course differences in the crossing situation were from 115° to 165°. By turning to port, the avoidance manoeuvre could certainly have been undertaken at even shorter distances from the other ship. However, during the simulations, Own Ship acted in accordance with Rule 17 (c) which states: ‘A power-driven vessel which takes action in a crossing situation in accordance with subparagraph (a) (ii) of this Rule to avoid collision with another power-driven vessel shall, if the circumstances of the case admit, not alter course to port for a vessel on her own port side.’(authors’ emphasis). It is well known that Rule 17 (c) does not prohibit a complete turn to port, as it states ‘if the circumstances of the case admit’, but the authors of this study believe that action should always be kept in mind which is as consistent as possible with the rules and conducted in accordance with the ordinary practice of seamen. Turning the ship to port and thus avoiding a collision should be considered only as a last resort, when the circumstances are such that it is no longer possible to take any other action appropriate to avoid a collision.
The survey established limit values for avoiding collisions and passing the other ship at a distance of 100 m. As already mentioned, avoiding a collision by passing the other ship at a minimum distance of 100 m can be considered the worst-case scenario. The authors’ future research will take into account the potential errors of radar when measuring distance and of the target tracking facility when determining CPA and TCPA (IMO, 2004), ship length and breadth, radar antenna position and common reference point, and external influences that may affect the ship's manoeuvrability, such as sea current, wind, waves and under-keel clearance.
6. Conclusions
The paper systematically investigates and considers the term ‘close-quarters situation’, which is used to avoid collisions at sea. Since the risk of collision is significantly increased in close-quarters situations and in the event of ship collision the consequences are known to be great, it is very important to understand the criteria by which collision can be avoided in a close-quarters situation by manoeuvring at least one of the ships. The interpretations and definitions of the term ‘close-quarters situation’ presented here show that the term has not yet been defined, and there is no common understanding of the term. Therefore, this paper proposes a definition of a close-quarters situation that is acceptable for a ship officer who behaves in accordance with the ordinary practice of seamen. The survey provided distances between vessels and times to CPA at which an action to avoid a collision can still be taken, in defined scenarios, to have ships passing at distance of 100 m. For an officer of the watch on the bridge, knowing such values for their vessel and the situation in which the vessel finds itself would certainly help the officer to understand the limit values at which a collision can still be avoided. Therefore, the research defined that the stand-on ship should take the avoiding manoeuvre in order to establish the ultimate position to which the stand-on ship can wait for a give-way ship that is not complying with the Rules. Precisely because of this, different ship models were used in simulations, selected according to their form and dimensions to provide insight depending on the size of the ship. The results of the research are also useful for VTS operators, as their role in collision avoidance is expected to increase in the future, as well as those who operate unmanned ships from land in the future, and the artificial intelligence that will independently take actions to avoid collisions between ships. Since the paper presents a very limited number of obtained results, those interested can contact the authors to obtain other data that are not presented in the paper.