



1. INTRODUCTION
Artificial intelligence technology provides considerable possibilities for a more environmentally friendly, operationally efficient, truly green and very safe smart shipping industry in the foreseeable future. In this context, autonomous ships are receiving extensive attention because they have the potential to reduce shipping costs and environmental impacts, improve health and safety for personnel working in the industry, and facilitate data collection and analysis processes. Meanwhile, artificial intelligence can also improve navigators' situation awareness, prediction capabilities and avoidance of encounters to reduce the risk of collision (Zhou et al., Reference Zhou, Liu, Wu and Wang2019). It may be considered that the industry is now at the dawn of an era of autonomous navigation, where the achievements of artificial intelligence technology made so far will find opportunities for a more comprehensive application.
In the near future, autonomous ships will gradually become more prevalent and operate independently of human beings. ‘Shore control centre’ (SCC) seems to be the generally accepted denomination for the facility that will control or supervise autonomous ships (MUNIN, 2012; Rolls-Royce, 2016; Kongsberg, 2017a). The SCC will gather all the necessary resources either for remote control of ships or for monitoring their voyages via communication links and will be on standby ready to take control in case of an emergency. The consequence of the introduction of SCCs may, however, result in the existing risks increasing and new risks being introduced, such as cyber risks. If the communication links are compromised and key information used to control vessels is leaked, it may render individual vessels and even the whole fleet unable to comply with the International Regulations for Preventing Collisions at Sea 1972 (COLREGs).
Therefore, to smooth the introduction of autonomous ships, potential conflicts with COLREGs need to be discussed and analysed in detail. In this study, six participants – four nautical scientists and two deck officers – were invited to take part in one-on-one debriefing interviews to enrich the conclusions of the analysis. Generally, the COLREGs compliance of autonomous ships is the primary concern that needs to be addressed before and at the beginning of any voyage.
2. REVIEW OF THE LITERATURE
Some sceptical experts are of the opinion that the safety of maritime transportation could be jeopardised, instead of improved, by the introduction of autonomous ships (Wróbel et al., Reference Wróbel, Montewka and Kujala2017). It is therefore paramount that possible application barriers in the regulatory system should be interpreted and amended before the actual introduction of autonomous ships.
The first decades of the 21st century have seen a large number of unmanned navigation projects, such as the Maritime Unmanned Navigation through Intelligence in Networks (MUNIN) project (Burmeister et al., Reference Burmeister, Bruhn, Rødseth and Porathe2014) and the Advanced Autonomous Waterborne Applications (AAWA) Initiative (Rolls-Royce, 2016). These research projects have made the autonomous ship one of the most striking development directions in the industry. In fact, the idea of autonomous ships is partly due to the unmanned surface vehicle, whose origin can be traced back to a remotely-controlled boat, controlled by radio, that Nikola Tesla showed at Madison Square Garden in New York in 1898 (Bertram, Reference Bertram2016). Similarly, the concept of autonomous ships is also not novel, as it was first proposed by Schönknecht in 1983 (Schönknecht, Reference Schönknecht1983). Subsequently, Japanese shipping enterprises (Yamashita Reference Yamashita1967; Mitsui 2019) explored this concept in more depth and built several automated ships to minimise labour costs.
Recently, DNV-GL and Kongsberg released the concept ship ReVolt (DNV-GL, 2014, 2018) for short-haul sailing and also the world's first fully electric and autonomous container ship, YARA Birkeland (Kongsberg, 2017a, 2017b). Wärtsilä has successfully carried out the first ever attempt at autonomous dock-to-dock operation without human intervention, visiting three ports serviced by Folgefonn, an 83-metre long ferry owned by leading Norwegian operator Norled in November 2018 (Wärtsilä, 2018a). The same ferry was also used for the world's first autodocking tests between January and April 2018 (Wärtsilä, 2018b). In the previous year, the same Wärtsilä team successfully tested remote control of a ship sailing in the North Sea from a location in San Diego, California. In December 2018, the world's first remotely-controlled trial took place using the existing ice-class passenger ferry Suomenlinna II, which was retrofitted with ABB Ability™ Marine Pilot Vision situational awareness solution (ABB, 2018). Around the same time, Rolls-Royce and the Finnish state-owned ferry operator Finferries successfully demonstrated the world's first fully autonomous ferry, Falco, which can be remotely controlled, navigate autonomously and autodock without human intervention (Rolls-Royce, 2018). It is worth noting that the test relied on the research project Safer Vessel with Autonomous Navigation (SVAN) and applied findings from AAWA. These exciting advances are occurring not only in commercial maritime operations but also in military and defence. In October 2016 the Royal Navy hosted the world's first large-scale innovative demonstration of maritime autonomous systems in the UK, ‘Unmanned Warrior 16’, which provided the potential for maritime autonomous systems to undertake military tasks. Two years later, ‘Autonomous Warrior 18’ was supported by the Royal Australian Navy to demonstrate the potential of uninhabited systems to transform defence capability based upon the success of ‘Unmanned Warrior 16’. Generally, the idea of such autonomous ships or maritime autonomous systems would have been considered unthinkable just a decade ago. However, rapid advances in artificial intelligence technology have enabled ship-owners and -builders to build working examples of what would once have been considered the realm of science fiction. Some of these remarkable and eye-catching projects are shown in Figure 1.
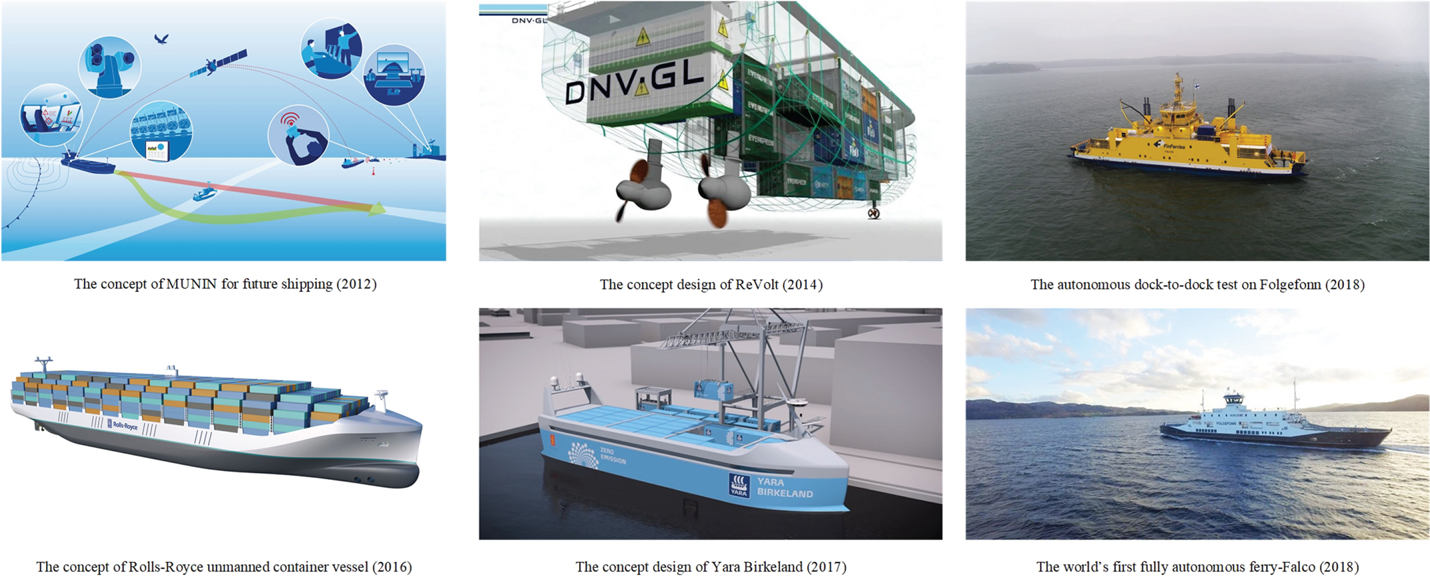
Figure 1. Examples of remarkable projects and concepts for autonomous ships.
In spite of these developments, at present there is no unified definition of autonomous ships in the international arena. Many definitions have been proposed by researchers, international organisations and authorities, such as Bertram (Reference Bertram2016), MUNIN (2012), the Norwegian Forum for Autonomous Ships (Rødseth and Nordahl, Reference Rødseth and Nordahl2017), Bureau Veritas (2017), the Danish Maritime Authority (2017), the American Bureau of Shipping (Jorgensen, Reference Jorgensen2016) and the International Maritime Organisation (IMO). In this paper, the IMO definition of autonomous ship is adopted as ‘A ship which, to a varying degree, can operate independently of human interaction’ (IMO, 2018b). Based on the literature, a ship can be considered an autonomous ship if it performs a defined set of operational actions with no or reduced crew surveillance or attention regardless of whether there are any crew members onboard. The crucial feature is that the navigation system can be controlled remotely or in an autonomous mode. Generally, the development of autonomous ships can be divided into four processes, as presented in Figure 2: system decision support, shore-based remote control (with seafarers onboard), shore-based remote control (without seafarers onboard) and fully autonomous. This paper concentrates on remotely-controlled ships (no seafarers onboard) and fully autonomous ships.

Figure 2. The process of development and roadmap of autonomous ships.
The purpose of this paper is to make recommendations for the amendment of the COLREGs collision avoidance protocols to make them more inclusive of autonomous ships. The analysis can be used to help identify the characteristics of autonomous ships, and provide a path towards the safety and security evaluation factors that need to be considered in the cyber era. A considerable amount of research has been concentrated on the technological possibilities of collision avoidance for autonomous ships (Statheros et al., Reference Statheros, Howells and Maier2008; Johansen et al., Reference Johansen, Perez and Cristofaro2016; Mei and Arshad, Reference Mei and Arshad2016, Reference Mei and Arshad2017; He et al., Reference He, Jin, Huang, Xiong, Chen and Mou2017), especially for automatic collision avoidance and path planning (Lyu and Yin, Reference Lyu and Yin2018; Singh et al., Reference Singh, Sharma, Hatton and Sutton2018a). Recently, several efforts have been made to integrate COLREGs in path planning algorithms. However, most, if not all, of the existing studies (Naeem et al., Reference Naeem, Henrique and Hu2016; Singh et al., Reference Singh, Sharma, Sutton, Hatton and Khan2018b; Wang et al., Reference Wang, Yu, Liang and Li2018; Lyu and Yin, Reference Lyu and Yin2019; Woerner et al., Reference Woerner, Benjamin, Novitzky and Leonard2019) have only considered five basic rules of COLREGs for incorporation, Rules 13, 14, 15, 16 and 17(a)(i). Various external factors are ignored, such as restricted visibility, seamanship in case of breach of COLREGs, non-compliant behaviour of the target vessel and vessels with different degrees of manoeuvrability. Obviously, these constraints in the optimisation framework cannot sufficiently provide collision-free manoeuvres and COLREGs-compliant behaviours in a seafarer-like way. To fill the gap, the MAchine eXecutable Collision regulations for Marine Autonomous Systems (MAXCMAS) project has made many beneficial attempts and explorations (Hu et al., Reference Hu, Naeem, Rajabally, Watson, Mills, Bhuiyan and Salter2017; Varas et al., Reference Varas, Hirdaris, Smith, Scialla, Caharija, Bhuiyan, Mills, Naeem, Hu and Renton2017), finding that some newly developed algorithms allow existing COLREGs to remain relevant in a crewless environment. The research of Woerner et al. presents a means to quantify COLREGs and establishes notional algorithms for standardising evaluation (Woerner et al., Reference Woerner, Benjamin, Novitzky and Leonard2019) in a mathematical sense. There are, however, some important rules that have not been discussed in detail which still need to be addressed for future development.
To solve the above problems, many studies have been driven and funded successively, such as ‘Safety and Regulations for European Unmanned Maritime Systems’ under the framework of the European Defence Agency Unmanned Maritime Systems (EDA, 2012), and initiatives to explore the inclusion of the operation of marine autonomous systems (IMO, 2015). A proposal to carry out a regulatory scoping exercise (RSE) to assess application barriers in current provisions of IMO instruments and to determine the safe, secure and environmentally sound operation of maritime autonomous surface ships (MASSs) was agreed by the Maritime Safety Committee (MSC) 98 (IMO, 2017). Subsequently, the RSE was endorsed in MSC 99 and approved in MSC 100 (Bureau Veritas, 2018; IMO, 2018a). In June 2019, MSC 101 considered a progress report on the RSE and approved interim guidelines for MASS trials (Bureau Veritas, 2019; Lloyd's Register, 2019). In addition, some experts have explored the potential conflicts between the operation of unmanned vessels and existing private maritime laws (Carey, Reference Carey2017; Karlis, Reference Karlis2018; Rodriguez-Delgado, Reference Rodriguez-Delgado2018; Veal et al., Reference Veal, Tsimplis and Serdy2019), as well as the technical risks and legal problems involved in the introduction of unmanned vessels (Aro and Heiskari, Reference Aro and Heiskari2017) and the possible challenges of autonomous ships (Komianos, Reference Komianos2018; Perera, Reference Perera2018; Ringbom, Reference Ringbom2019).
In summary, limited studies have contributed to the issue of autonomous ships facing collision avoidance. Given that conventional vessels and autonomous vessels will co-exist for a considerable period, it is important to understand potential conflicts and COLREGs compliance. Additional safety value can be provided. Therefore, this paper discusses the application barriers of COLREGs in the introduction of autonomous ships from the novel perspective of navigation practice and aims to provide solutions to promote the tolerance of the rules.
3. POTENTIAL CONFLICTS BETWEEN AUTONOMOUS SHIPS AND COLREGs
COLREGs is the current maritime traffic rules developed by the IMO and is applicable to all vessels upon the high seas and in all waters connected therewith navigable by seagoing vessels. As such, autonomous merchant ships must comply with COLREGs. Although COLREGs have been developed assuming the physical presence of onboard crews, the stated definition refers to the ship itself, not any particular individual, except for Rule 2. Therefore, there may be potential conflicts and barriers when applying COLREGs to autonomous ships. Regulations from Part A–General and Part B–Steering and Sailing Rules of COLREGs will be discussed one by one in this section, as the main basis and behaviour guides in identifying the risk of collision, making decisions and taking actions for collision avoidance.
3.1. Part A–General
3.1.1. Rule 2 (Responsibility)
Prior to the emergence of autonomous ships, the subject of legal responsibility included the master, crew members and ship-owners. With the introduction of autonomous ships, new subjects such as shore-based operators, software developers and system producers may become involved in legal affairs (Aro and Heiskari, Reference Aro and Heiskari2017). Therefore, it will be more complicated to determine the person responsible for an accident accurately as an autonomous ship may operate under one or more degrees of autonomy during a single voyage. Taking the taxonomy of autonomy levels of Lloyd's Register and the IMO as an example (Danish Maritime Authority, 2017; Lloyd's Register, 2016]), starting from the AL3 and R levels, fewer crew members are required only to authorise some decisions with high complexity or high influence, as shown in Figure 3.

Figure 3. The decision maker and decision location of different autonomy levels in Lloyd's Register and IMO.
Based on the dynamic autonomy of the autonomous ship, the AAWA project believes fully autonomous navigation can be achieved in the open sea, while close monitoring and remote control will be needed in other waters to maintain the essential safety level. One critical issue highlighted is the subject of responsibility for accidents involving autonomous ships. When an autonomous ship is remotely controlled, the responsible SCC may not be able to respond in real-time to incidents and thus it will be unable to take appropriate actions. The responsible SCC should be held liable for the actions of a remotely-controlled ship (Carey, Reference Carey2017; Karlis, Reference Karlis2018), while the case would be more complicated for a fully autonomous ship controlled by ANS, which is a system that relies on massive data for autonomous learning, identification and decision making. Nevertheless, the ship-owner should bear relevant responsibility regardless of the situation the autonomous ship encountered.
Mere violation of COLREGs does not necessarily imply the occurrence of liability, unless the violation is due to the neglect of COLREGs (Gault et al., Reference Gault, Hazelwood, Tettenborn, Girvin, Cole, Macey-Dare and O'Brien2016). Actions that depart from the rules to avoid immediate danger are allowed if a high risk of collision is encountered when strictly following COLREGs. Navigation monitoring is done by an SCC and collision avoidance decisions are made by ANS, when autonomous vessels achieve autonomous navigation in the open sea (AL4, AL5, RU). If a decision of the ANS which strictly complies with COLREGs would result in immediate danger, intervention by SCC operators may be too late, due to reaction times. Therefore, in waters where autonomous and conventional vessels co-exist, COLREGs should not be blindly complied with – much depends on the ‘ordinary practice of seaman’ and the ‘good seamanship’ of the master. From a compliance standpoint, there is nothing in Rule 2 to prevent such monitoring being done by artificial intelligence technology. Currently, maintaining the equivalent safety standard of conventional vessels is one of the problems and bottlenecks that is difficult to solve with existing artificial intelligence technology (Pietrzykowski and Malujda, Reference Pietrzykowski and Malujda2018), especially for the collision situations where COLREGs do not apply and when they are applied (Zhao, Reference Zhao2008).
In summary, this rule requires human intervention for decision making. Theoretically, the remote-controlled mode can still meet the safety requirements, but further revisions may be necessary to resolve the barriers to actual application for fully autonomous mode.
3.2. General definitions (Rule 3)
According to the definition of power-driven vessels in Rule 3(b), an autonomous ship (except for an autonomous sailing vessel) should be regarded as a ‘power-driven vessel’. However, according to Rule 3(f), it also has the potential to be generally defined as a ‘vessel not under command’ only in some ‘exceptional circumstance’, such as when the communication link between the SCC and the autonomous ship is accidentally interrupted, or control requirements fail to be met by the SCC. Unless otherwise specified, other ships should give way to an autonomous ship.
In addition, the manoeuvrability of autonomous vessels may be limited, depending on the level of autonomy and the type of work they are engaged in, which includes dredging, surveying, launching (recovering) aircraft, mine clearance operations and towing operations. According to Rule 18(a)–(c), all ships except a ‘vessel not under command’ shall keep out of the way of a ‘vessel restricted in her ability to manoeuvre’. However, the possibility of an autonomous ship being defined as ‘vessel restricted in her ability to manoeuvre’ is prevented, when it is only engaged in cargo transportation. As such, autonomous ships will bear the highest level of responsibility.
Importantly, Rule 3(k) defines ‘vessels in sight of one another’ as when a ship can only be observed visually from the other. This rule is the presupposition and basis for the rules in Part B discussed below. The requirement to ‘be observed visually’ seriously impedes the application of COLREGs to autonomous ships. Similarly, ‘restricted visibility’ should be further explained as well. The profound impacts will be shown in the following sections in detail.
3.3. Part B–Steering and sailing rules
Section I–Conduct of vessels in any condition of visibility
3.3.1. Look-out (Rule 5)
According to the historical background of COLREGs revised in 1972 and the definition of Rule 3(k), ‘sight’ in this rule should be defined as ‘visual observation’, while ‘hearing’ refers to ‘aural ability’. This means the physical presence of crew members onboard is needed, which appears to bar its application to autonomous ships (without crew onboard).
The purpose of ‘every vessel maintain a proper look-out’ is that the crew must be able to make a full appraisal of the situation and of the risk of collision. However, observations obtained only by sight and hearing are not sufficient for collision risk evaluation in the current complicated navigation environment, especially with vessels of ever greater size and speed. The usage and auxiliary role of nautical instruments, such as automatic identification system (AIS) and automatic radar plotting aid (ARPA), is indispensable. In recent years, computer vision as a field of science has emerged in various applications such as image reconstruction, event monitoring, target tracking, target recognition and machine learning. It is becoming possible for computers to replace human eyes to identify, track and measure a target. Thus, ‘sight’ can be extended to a more generalised definition of sight including ‘computer vision’, while ‘hearing’ can refer to technology able to transmit or feedback the required information to the SCC or ANS in the form of audio. In practice, autonomous ships will be equipped with an appropriate number of high accuracy sensors to ensure that surrounding environmental information is sufficiently detected and adopted by the autonomous ship's control system. As such, autonomous ships will have more advanced and safer ‘available means’ for proper look-out than conventional ships.
At the same time, Rule 5 and the definition of ‘vessels in sight of one another’ is at the core of the application barriers of COLREGs to autonomous ships. The current controversy is whether technical means can replace physical look-out to maintain the required safety level, as it is still debatable whether human perception is essential for generalised ‘sight’ and ‘hearing’. The subsequent evaluation process should focus on coordination between ‘sight’ and ‘hearing’ algorithms consistent with a reasonably trained human look-out (Woerner et al., Reference Woerner, Benjamin, Novitzky and Leonard2019). Therefore, the IMO needs to make cautious and reasonable revisions and further clarifications of this rule.
3.3.2. Safe speed (Rule 6)
No numerical value is explicitly provided for safe speed, it depends on the type, manoeuvre performance and navigational environment of ships. The requirement of ‘safe speed’ for autonomous ships should be co-considered with Rule 5 to reflect the actual situation. The factors considered should focus on the impacts of unmanned navigation mode, especially any foreseeable communication delays. In the near future, port authorities will be able to design dedicated channels for autonomous ships and redefine ‘safe speed’. Ships must be able independently to determine their effective time-distance capabilities, turning kinematics and dynamics.
3.3.3. Risk of collision (Rule 7)
In the current research on autonomous ships, accurate and effective identification of collision risk is the essential precondition for making collision avoidance decisions. Continuous analysis of the navigation situation is crucial as inadequate risk assessment can easily lead to inappropriate or even wrong decisions. The minimum level of safety of autonomous ships must be at least equivalent to and should be higher than the standard of conventional ships (Zhou et al., Reference Zhou, Liu, Wang and Ni2018). The ability to identify the risk of collision effectively is the precondition to navigating at sea. Therefore, there are no application barriers in this rule.
3.3.4. Action to avoid collision (Rule 8)
‘Good seamanship’ is considered to be a necessary condition for collision avoidance and it has to be met for the navigation of autonomous ships. In the meantime, we suggest that the International Convention on Standards of Training, Certification and Watchkeeping for Seafarers (STCW) should be used as a basic training guide or reference for shore-based operators when autonomous ships are remotely controlled.
Section II – Conduct of vessels in sight of one another
Other than the ‘Conduct of Vessels in Any Condition of Visibility’, COLREGs are based on whether vessels are in sight of one another, which is divided into ‘Conduct of Vessels in Sight of One Another’ and ‘Conduct of Vessels in Restricted Visibility’. In the ‘Conduct of Vessels in Sight of One Another’, the particular obligations of collision avoidance are defined for when vessels meet in three different situations, and the responsibilities between vessels are mentioned based on types of vessels in detail.
3.3.5. Overtaking, head-on situation, crossing situation and responsibilities between vessels (Rules 13, 14, 15, 18)
Rules 13, 14, 15 and 18 are the core provisions to determine the conduct of encounter situations between two vessels in sight of one another and the guiding principles for decision making. The types of encountering ships need to be confirmed when ships are in sight of one another. An actual navigation case is given as follows (Figure 4(a) and (b)). During the daytime, with good visibility, vessel A is a power-driven vessel which visually observes vessel B approaching forward of her port beam. If vessel B is a power-driven vessel, the two vessels shall apply ‘crossing situation’ (Rule 15), whereby vessel A is the stand-on vessel to keep her course and speed and vessel B is the give-way vessel. However, if vessel B is identified as a ‘vessel not under command’ according to her shape as observed visually, the two vessels shall comply with ‘Responsibilities Between Vessels’ (Rule 18), whereby vessel B is the stand-on vessel and vessel A is the give-way vessel. Therefore, except where Rules 9, 10 and 13 otherwise require, the identification of types of vessels in an encounter when they are in sight of one another has a direct impact on the action rules to be followed and is the key for collision avoidance decision making.

Figure 4. Examples of two vessels meeting in a crossing situation: (a) vessel B is a ‘power-driven vessel’, (b) vessel B is a ‘vessel not under command’.
From Rule 3(k), ‘vessels in sight of one another’ is the crux to identify the type of vessels, either by physically observing the vessel or its onboard-installed light or shape. However, the small size of the shape (normally a sphere with a diameter of 60 cm), requires the observing ship to be as close as 1 n mile to the arriving vessel to confirm whether the shape is displayed. Even closer distance is required for the observing vessel to fully recognise the information carried by the shape to determine the type of vessel. If encountering at night, the types of vessels and encounter situations are judged by their lights. The minimum visible distance of a masthead light (ships of 50 m and above) is 6 nautical miles. For sidelights, sternlight, towing light and all-round light, the minimum visible distance (ships of 50 m and above) is 3 nautical miles. Based on the current navigation practice, however, the collision decision should be made when the distance between two vessels is about 5–6 nautical miles, or not less than 6 nautical miles, and action to avoid collision needs to be taken before 3 nautical miles. A vessel should take early and substantial action to keep well clear and to result in passing at a safe distance. Therefore, the types of vessels and encounter situations often cannot be identified by human vision-based observation, even if visibility is very good. This makes the actual scope of application of the ‘Conduct of Vessels in Sight of One Another’ rules more restrictive than the statutory scope of application.
In summary, ships need to take action to avoid collision at a distance far beyond where the shape or light of the approaching vessel can be visually observed. Hence, avoidance of conflicts has improved since AIS has been fitted mandatorily onboard ships, as stated in MSC 99(73) and SOLAS Chapter V from 2002. Even so, theoretically, the definition of ‘vessels in sight of one another’ still precludes the method of identifying types of meeting ships using navigation aids such as AIS. Thus, Rule 3(k) needs to be further revised.
3.3.6. Actions by give-way and stand-on vessels (Rules 16 and 17)
According to Rules 16 and 17, as long as autonomous ships can take early and substantial action to keep well clear or maintain their course and speed, they will be deemed to have complied with Rules 16 and 17. Additionally, a reliable, secure and efficient data transmission link without any delay between the SCC and the autonomous ship needs to be provided.
It should also be remembered that Rule 17(a)(ii) and (c) only provide a dubious means of avoiding a close-quarters situation but not a means of escaping from it (Crosbie, Reference Crosbie2008). The current studies of path planning for autonomous navigation are also facing difficulties, especially for multi-objective optimisation. Some new perspectives and attempts could be made, such as considering mathematical inequalities and constraints in the optimisation framework, the introduction of good seamanship, hierarchising multi-objectives synergistically and prioritising the objective of speed change preference.
Section III–Conduct of vessels in restricted visibility
3.3.7. Conduct of vessels in restricted visibility (Rule 19)
‘Restricted visibility’ means that the way of judging collision risk via visual observation is restricted. Arguably, Rule 19 would become redundant when restricted visibility is alleviated by the use of computer vision and aids to navigation. However, that argument misses the point of mutual obligations which is fundamental to the ‘Conduct of Vessels in Sight of One Another’. With the co-existence of autonomous ships and non-autonomous ships anticipated for a long time, the statement of Rule 19(c) should be attended closely.
An interesting hypothesis that can help us understand the changes and challenges is given here. An autonomous ship (superior vision) and a non-autonomous ship (visual observation) encounter in restricted visibility, the latter can be ‘seen’ from the autonomous ship, but cannot ‘see’ the autonomous ship. Hence, ‘vessels in sight of one another’ cannot occur unless both are autonomous ships. The autonomous ship needs to apply the general rules in Section I, but the non-autonomous ship must comply with Rule 19. In summary, Rule 19 can never be assimilated into the rules in Section II, which is not an application barrier to autonomous ships. It is noteworthy that this is an issue identified in Part B at the framework level rather than at the current rule level.
4. DISCUSSION OF THE GOOD SEAMANSHIP REQUIRED BY COLREGs
In the previous section, the potential conflicts between the operation of autonomous ships and the provisions of COLREGs were addressed. In this study, four nautical scientists and two deck officers were invited to give their opinions. All of them have rich navigational practices and good seamanship. They are familiar with the COLREGs and have profound insight into the impacts of and potential barriers to the introduction of autonomous ships. Their demographic information is listed in Table 1. During the discussion and interviews, it was found that the following three aspects attracted the most discussion from their perspective, namely ‘good seamanship’, ‘proper look-out’ and ‘vessel not under command’. Therefore, these three aspects will be analysed in this section to arrive at some possible solutions for the revision of COLREGs.
Table 1. Participants' information and navigational experience.

4.1. Autonomous ships and ‘good seamanship’
Although the expression ‘good seamanship’ appears only once, in Rule 8(a), it is the spiritual core running through COLREGs and it is the highest principle for collision avoidance. Gault et al. (Reference Gault, Hazelwood, Tettenborn, Girvin, Cole, Macey-Dare and O'Brien2016) considered that good seamanship is the basis of all rules as well as the fundamental rule of the COLREGs to fill the gaps for any missing or unclear statement. Veal and Tsimplis also believes that the Responsibility Rule actually indicates that compliance with ‘good seamanship’ is the most important principle in COLREGs (Veal and Tsimplis, Reference Veal and Tsimplis2017). Actions that depart from these rules can be taken in any special circumstances to avoid immediate danger.
There are some different opinions on the relationship between autonomous ships and ‘good seamanship’ (Comité Maritime International, 2018]{bib8a}). For example, some argue that autonomous ships do not violate ‘good seamanship’ while others treat remotely-controlled ships differently from fully autonomous ships. In the research for this paper, however, all the participants and the authors agreed that remote operation without crew onboard and fully autonomous operation without any human involvement should not be regarded as contrary to ‘good seamanship’. Put differently, human intervention in the decision-making loop can be considered to fulfil the observance of ‘good seamanship’ for remotely-controlled ships. If the SCC operators are adequately trained and certified to be capable to respond to extreme navigation conditions and handle multiple problems arising during the voyage, then unmanned navigation should not be considered a violation of good seamanship even without any onboard crew. Fully autonomous ships must meet the safety standards at least as well as ships operated by a qualified crew. For example, navigation in shallow water is different from that in deep water, the impact of hydrodynamics and motion control has to be considered to ensure the safety of navigation, including shallow water effects, bank effects and the interaction effects between two encountering ships. The integrated exercises are the embodiment of ‘good seamanship’. However, the ability of the current algorithms for autonomous navigation to handle complex problems is not sufficient. The tasks are hard and time-consuming, but the operation of autonomous navigation has to solve these problems to satisfy the requirement of ‘good seamanship’.
4.2. Autonomous ships and ‘proper look-out’
At present, the requirements of ‘proper look-out’ are based on the physical presence of onboard crew. As described in section 3.2.1.1., the question is whether the definition of ‘sight’ and ‘hearing’ can be broadened to allow technical means to replace physical look-out. For example, shipborne equipment such as cameras and sonars may transmit navigation information on conditions near the ship to the SCC in order to meet the requirements of ‘proper look-out’.
As is known to all, ‘proper look-out’ is crucial and essential for navigation safety. Although the mature operation modes of ‘proper look-out’ has been established for traditional ships, without considering autonomous ships, the adoption of technical means within ‘all available means’ may be a possible alternative to meet the requirement. In our opinion, ‘physical look-out’ can be replaced by technical means to maintain a ‘proper look-out’, as long as the alternative technical means can provide similar or even better situation awareness than human perception. Meanwhile, three participants (No. 3, 5, 6) especially emphasised the necessity for human perception at the present stage. Continuous and effective information transmission to the SCC is the crux for technical means to maintain reliable ‘proper look-out’. They particularly wished to point out that further discussion on the possibility of equipment malfunction and its consequences is required to complete the service loop of technical means. Thus, Rule 5 should be revised, otherwise it remains an insurmountable hurdle to the operation of autonomous ships without human watch-keepers on board.
4.3. Autonomous ships and ‘vessel not under command’
Despite the fact that at the time COLREGs was drafted autonomous ships were not contemplated, a ship navigating without an onboard crew would not constitute a ‘vessel not under command’ insofar as it is effectively controlled remotely or autonomously. Such a vessel could not be defined simply as ‘not under command’ just because it is autonomous, especially when it is only engaged in cargo transportation. Based on our interviews with six participants and navigational practices, we argue that the exceptional circumstances that lead to vessels not being under command are accidents beyond the ordinary mode of operation of the ship. As such, the vessel's ordinary mode of operation, including remotely controlled and fully autonomous, does not mean that it is ‘in exceptional circumstances’. At the same time, autonomous ships may go out of control due to technical failures during navigation, such as energy failure or interruption in communication with the SCC owing to loss of satellite coverage. Therefore, the rules on ‘vessel not under command’ do not present a hurdle to the operation of autonomous ships.
5. POSSIBLE SOLUTIONS AND FURTHER ANALYSIS
The potential conflicts between autonomous ships and COLREGs were described and discussed in the above sections, which focused on Part A–General and Part B–Steering and Sailing Rules of COLREGs. The three aspects that attracted most discussion from the perspective of the interviewees were then analysed in depth, namely ‘good seamanship’, ‘proper look-out’ and ‘vessel not under command’. Generally, there are no insurmountable hurdles in COLREGs to the introduction of autonomous ships, but some provisions still need to be revised and further elaborated.
Hence, the results of our analysis and effective suggestions are listed below:
• Rule 2 should be further elaborated regarding the subject of responsibility when the autonomous ship has an accident, including the responsibility of ship-owners, SCC and ANS designers.
• Rule 3(k)(l) needs to be revised: ‘vessels in sight of one another’ should not be restricted to ‘visual observation’ since computer vision and navigation aids can be deemed an effective supplement.
• Referring to Rule 3(k)(l), physical look-out should be allowed to be replaced by technical means in Rule 5. It should be emphasised that the performance criteria for alternative technical means need to be at least as good as physical look-out and meet the requirements of ‘proper look-out’.
• A new annex to COLREGs about autonomous ships should be considered, including the taxonomy of autonomy levels and operation modes in voyages.
Some of the literature suggests that COLREGs need to be replaced due to the introduction of autonomous ships. Based on the analysis results in this paper, however, and the fact that the regulations have been in place for many years and the majority of ship officers are already familiar with them, we argue that COLREGs should be amended but not substantially modified or redefined.
Additionally, there are certain limitations in this paper as the autonomous ship technology is still undergoing research and development. We are unable to extract any other data or valid information from any real cases or reports of accidents to further support the analysis.
6. CONCLUSIONS
Autonomous ships represent the future of shipping, which is becoming a main concern in the industry. The introduction of autonomous ships will probably be an evolution and not a revolution. The commercial breakthrough of autonomous ships might still be a couple of decades away, but a likely scenario would be for their gradual introduction, starting in coastal areas or canals. Currently, there are some barriers to autonomous ships navigating on the open seas with respect to the maritime legal framework. After a deep analysis focusing on potential conflicts in COLREGs, however, we accomplished the goal of this research. The results of our study indicate that there are no insurmountable hurdles in COLREGs for the operation of autonomous ships. However, further elaborations and revisions should still be provided to eliminate uncertainties of interpretation. In the cyber era, the risks connected to cyber security must be considered in future research. Meanwhile, we oppose the substantive modification and replacement of COLREGs. The novel contribution of this work is to identify the possible application barriers in COLREGs, and to suggest valuable amendments and improvements. These conclusions can provide a reference for the RSE in the IMO instruments.
The IMO and some member states have raised the agenda for discussion of the operations of autonomous ships, which may be addressed in IMO instruments and a framework for an RSE has been endorsed (IMO, 2018b). The current regulatory environment discourages and slows down innovation, thus relevant study can smooth the introduction of autonomous ships in the existing industry and reflect the advancement of science and technology.
FINANCIAL SUPPORT
This research was partly supported by High-tech Ship Project (grant number 80116003), Research on the Countermeasures of Maritime Cooperation between China and ASEAN (grant number 80814011) and the China Association for Science and Technology.





