



1 Introduction
After industrial robots (e.g. robot arms) became popular products, many societies and associations tried to find the next focus of robot research. Over two decades ago, an obvious trend is to introduce robots into human life, for example, service robots, accompany robots, and so on. However, in human life, the robot research and development must face many difficulties that are extremely different from the industrial robots in the uniform environment such as factory. The robot developed in human life is not just technique problems. Friendly, safety criterion, and so on are other more important issues. Therefore, Federation International of RoboSport Association (FIRA) and RoboCup (https://www.robocup.org/) proposed robot competition and challenge from 1996. FIRA builds the website http://www.firaworldcup.org/ to promote robot competition and challenge. The robot competition and challenge push on a growing way for robot research and development in human life.
One of the major objectives of FIRA and RoboCup is to have a robot soccer team fighting and winning FIFA championship team on 2050. The further goal is to develop innovative robot techniques that are applied in human life. FIRA and RoboCup build a benchmark platform to solve the problems of robotics research and boost development progress based on competition and challenge. The matches between the teams of robot soccer and human are excitedly interactive between robots and human. In recent years, FIRA association extended further objective to sport, not just soccer. For example, HuroCup in FIRA includes 10 events, basketball, climbing, lift and carry, long jump, obstacle run, sprint, weight lifting, archery, marathon, and united soccer. The participant teams must make use of same humanoid robot hardware to autonomously finish the 10 events. The long-term objective of this league is to develop full capability humanoid robots.
In FIRA, HuroCup attracted many international teams to focus on humanoid robot research for this competition, such as Snobots from University of Manitoba, Canada, Plymouth from University of Plymouth, United Kingdom, aiRobot from National Cheng Kung University (NCKU), TKU from TamKang University (TKU), and so on. In addition to joining HuroCup, many teams published their research results. For example, Team NCKU developed different walking gaits for stable and fast walking of humanoid robots (Li et al., Reference Li, Kuo, Ho, Kao and Tai2015, Reference Li, Ho, Kuo, Ye and Wu2017). Team TKU developed the algorithms for object recognition and pose estimation (Lin et al., Reference Lin, Tsai, Lai, Li and Wong2018). For strong fighting capability during the competition, team TKU humanoid posture correction for developed push recovery balance control (Liu et al., Reference Liu, Lee, Xiao, Lin, Chou and Wong2019). As a result, HuroCup competition challenged humanoid robot technology to push research forward.
Table 1 The world record of HuroCup on kid-sized sprint. (Note that from 2009, the distance is extended to 3 m.)

Anniversary FIRA attracts many respecters to enjoy robot competition together. It is a kind of robots in human life, and under control in much safety. Sometime, the organizers arrange some special activities for robots to be more interactive with the respecters. The special activities thus stimulate the focus on developing humanoid robots to challenge human athletes, such as sprint and marathon. HuroCup started on 2002 and entered the period of explosive growth from 2007 to 2011. Many participating teams published research results based on competition experiments.
The technique of humanoid robot continuously progresses from anniversary world cup. The technique improvement can be concluded by the records of world cup. For example, as shown in Table 1, the world record of sprint in kid size, based on the competition rule (Baltes et al., HuroCup Sprint Rule), is improved quickly. From start, the distance of sprint is only 2 m. The humanoid robot needs to complete forward and backward traces for the 2-m distance. On 2008 World Cup, the record time is reduced to 20 seconds. Therefore, the distance is extended to 3 m on 2009. On 2016, the time is improved to 21.18 seconds. Similarly, based on the competition rule (Baltes et al., HuroCup Marathon and weight lifting rules), the marathon world record is improved, as shown in Table 2, and the weight lifting world record is improved by 80 disks on 2016. HuroCup competition actually improves the technique of humanoid robots. On 2018, a very surprising result occurred on weight lifting. The world record of weight lifting is broken by junior team for 104 disks, as shown in Table 3. This fact demonstrates that many research topics of humanoid robot cannot be explained and developed by only theories.
The ultimate objective of HuroCup is to develop humanoid robots to challenge human athletes. In FIRA 2018, the organizers held the archery competition of humanoid robots against human. This is the first time that humanoid robot challenged human athlete in the world. In this archery competition, the human teams are from Dode Elementary School and Chung Kung Senior High School, at Taichung. Both teams do constant training schedules in a professional archery club at Taichung. Many teammates are trained to become Olympic players by representing Taiwan.
Because the humanoid robot needs to do other event, not only archery, we also need to do much work on software for the archery competition. More specially, in this paper, the motion planning of both arms for more torque on bow and string is proposed.
Table 2 The world record of HuroCup on kid-sized marathon

Table 3 The world record of HuroCup on junior-team weight lifting

This paper is organized as follows. In Section 2, the adult-sized humanoid is designed and implemented for the archery competition against human. In Section 3, the special work on the humanoid robot for archery is described. In Section 4, the archery competition between humanoid robot and human is described. Conclusions and further development are included in Section 5.
2 Design and implementation of a humanoid robot for HuroCup
In this section, design and implementation of a humanoid robot for HuroCup 10 events are proposed. Because powerful legs are the essential modules of humanoid robots for HuroCup on many events, such as sprint, lift and carry, and marathon. In this paper, a special steeling structure of joints for powerful legs is designed. Such special structure is designed to provide excellent basic capability of the humanoid robot for HuroCup.
Figure 1 shows the special steeling structure on one of the knee joints. In this special structure, the joint angle is steeled by iron chain whose both sides are terminated by two springs, respectively. In Figure 1, left photo shows the joint angle at normal position as the spring in releasing situation, and right photo shows the joint angle steeled by motor for pushing spring. The spring saves energy in pushing situation and releases energy as setting free. The energy saved in pushing spring is released to provide extra instantaneous torque by setting free. In addition to motor torque, such special steeling structure provides extra instantaneous torque saved in the spring for motor rotation. Later, to demonstrate the capability of special steeling structure, a special experiment is designed and conducted. In addition to the special steeling structure of knee joint as shown in Figure 1 and that of ankle join is shown in Figure 2. In Figure 2, left photo is the spring in releasing situation, and right photo is the spring in pushing situation. Similarly, such special steeling structure provides extra torque for humanoid robot ankle via spring from pushing to releasing.
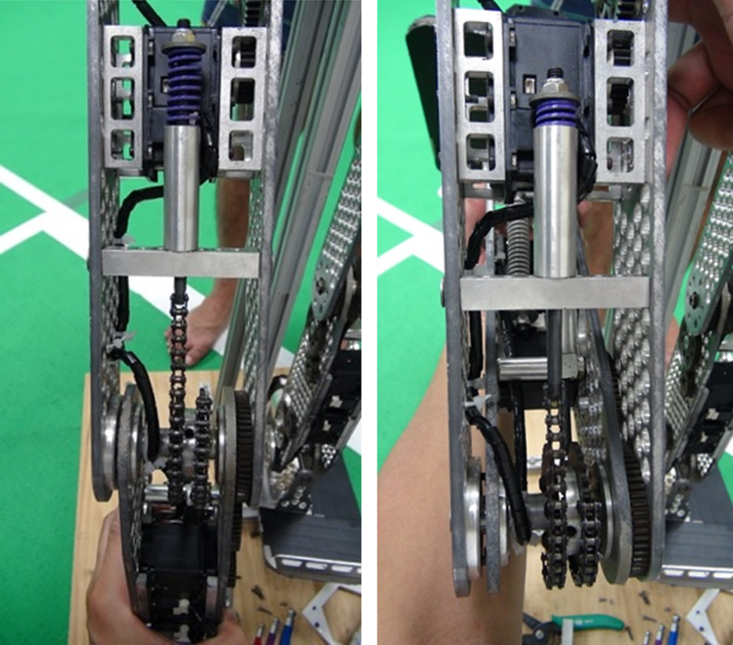
Figure 1 The special steeling structure of humanoid robot knee joints
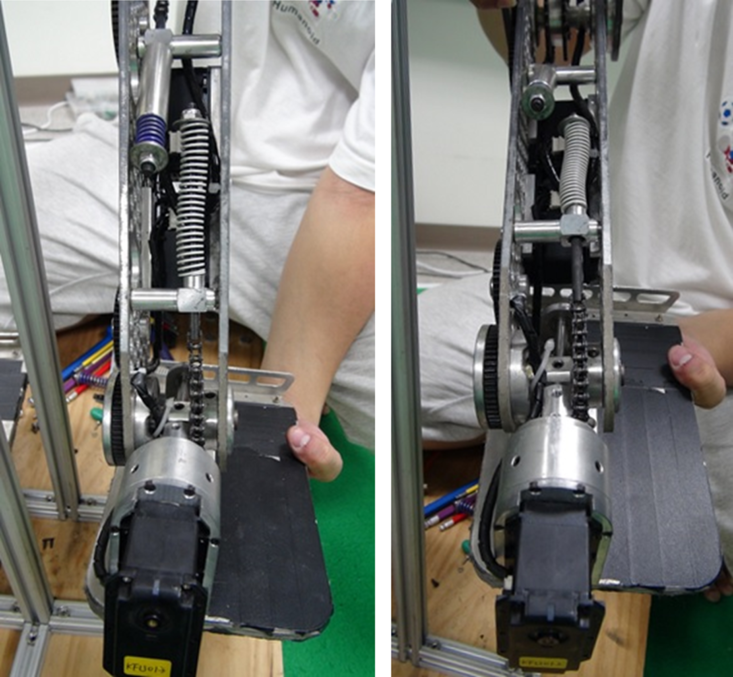
Figure 2 The steeling joint structure of humanoid robot ankle
Figure 3 is the lower body of the humanoid robot and its kinematic model, where Z i (for i = 1, 2, …, 14) are the Z-axes of all joints, and a i are the distance between Z i−1 and Zi. To evaluation its capability, 3.815 kg load put on the top of its lower body is experimented. For the experiment, the humanoid robot does the postures from squat down to stand up as shown in Figure 4. Figures 5 and 6 show the trajectories of knee joint position and torque, respectively. As shown in Figure 5, the position trajectories are completed when adding spring on the knee joints. On the upper part of Figure 5, the position trajectories are incomplete when no spring. Specially, the trajectories are in uncontrolled situation. Actually, the humanoid robot falls down. Figure 6 shows the torque trajectories. As shown in Figure 6, the torque trajectories are smaller when adding spring, and those ask too much torque more than motor output when no spring. This experiment result demonstrates that when adding spring on joints, the motors have enough torque to squat down and then stand up. Thus, the joint torque is under the limitation of motor output, and then the joint position follows desired trajectories.
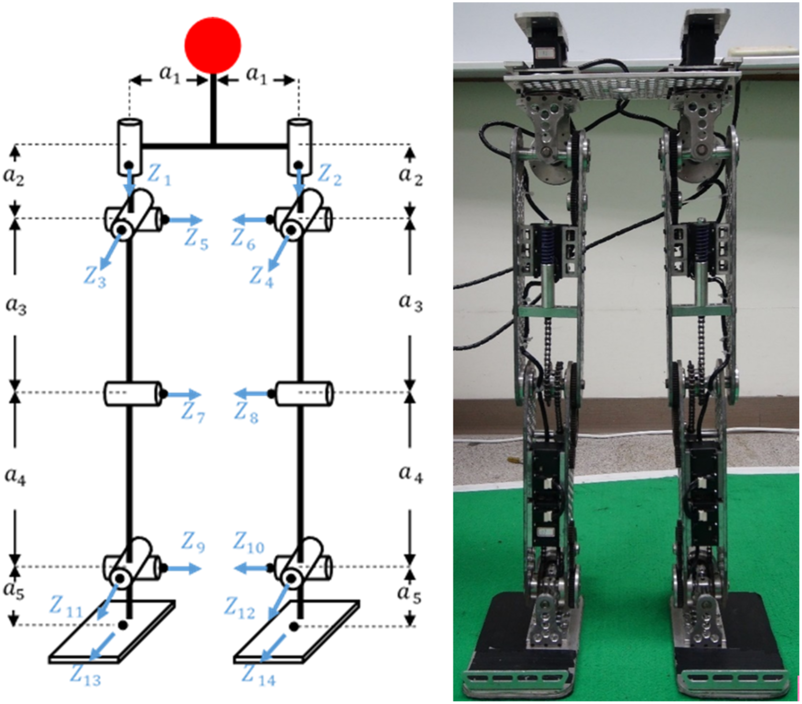
Figure 3 Both legs of the humanoid robot and its kinematic model

Figure 4 The humanoid robot does the posture from squat down to stand up as 3.815 kg load put on the top of its lower body
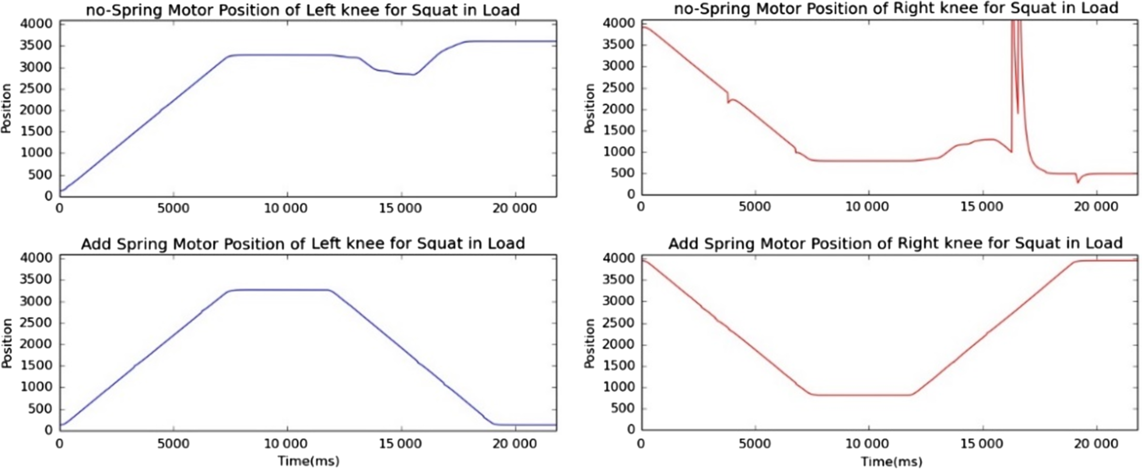
Figure 5 The compassion of no spring and adding spring when the humanoid robot squat down and then stand up as 3.815 kg load on its top of lower body. Left are the position trajectories of left knee joints and right are those of right knee joints
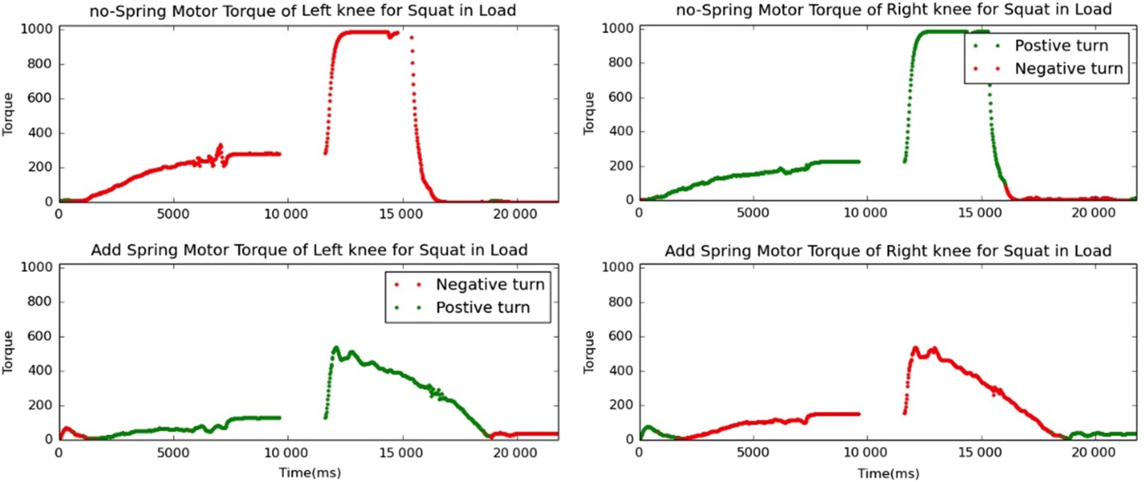
Figure 6 The compassion of no spring and adding spring when the humanoid robot squat down and then stand up as 3.815 kg load on its top of lower body. Left are the torque trajectories of left knee joints and right are those of right knee joints
Finally, the humanoid robot including upper body is designed and implemented for archery, as shown in Figure 7. The length of upper body is 450 mm, and the length of upper and lower arm is 225 and 180 mm, respectively. In addition, its left finger is designed to hold bow, and its right finger is designed to pull string. In the next section, the motion planning of both arms to have stronger force for shooting arrow is described.

Figure 7 The humanoid robot designed for archery

Figure 8 The forward kinematic models of right (left picture) and left (right picture) hands
From D-H rule (Craig, Reference Craig2005), the homogenous transformation matrix between adjacent coordinate systems can be expressed by
 \begin{equation}
{}^{n-1}T_{n} = \text{Rot}_{X_{n-1}} (\alpha_{n-1})\cdot \text{Trans}_{X_{n-1}}(a_{n-1}) \cdot \text{Rot}_{Z_{n}}(\theta_{n})\cdot \text{Trans}_{Z_{n}}(d_{n})
\end{equation}
\begin{equation}
{}^{n-1}T_{n} = \text{Rot}_{X_{n-1}} (\alpha_{n-1})\cdot \text{Trans}_{X_{n-1}}(a_{n-1}) \cdot \text{Rot}_{Z_{n}}(\theta_{n})\cdot \text{Trans}_{Z_{n}}(d_{n})
\end{equation}
where Rot is the rotation matrix, Trans is the translation matrix, and the parameters of the matrices are defined as follows:
 $\theta_{n}$
(Joint angle): the angle of rotation from the
$X_{n-1}$
axis to the
$X_{n}$
axis about the
$Z_{n-1}$
axis.
$\theta_{n}$
(Joint angle): the angle of rotation from the
$X_{n-1}$
axis to the
$X_{n}$
axis about the
$Z_{n-1}$
axis.-
$d_{n}$
(Joint distance): the distance from the origin of the (
${n-1}$
) coordinate system to the intersection of the
$Z_{n-1}$
axis and the
$X_{n}$
axis along the
$Z_{n-1}$
axis.
-
$a_{n-1}$
(Link length): the distance from the intersection of the
$Z_{n-1}$
axis and the
$X_{n}$
axis to the origin of the nth coordinate system along the
$X_{n}$
axis.
-
$\alpha_{n-1}$
(Link twist angle): the angle of rotation from the
$Z_{n-1}$
axis to the
$Z_{n}$
axis about the
$X_{n}$
axis.

















Both hands of the humanoid robot are different fingers as shown in Figure 8. In Figure 8, left picture is the forward kinematic model of right hand and right picture is that of left hand. As shown in the left hand of Figure 8, right hand has fingers, P7 and P8, to pull bow string. But the left hand does not need fingers to pull the bow string and only needs to hold the bow. Therefore, the finger of left hand only has P9 to hold bow, as shown in the right picture of Figure 8. The forward kinematics of both hands is represented by Table 4. Right finger has extra coordinate systems, P7 and P8, and left finger has extra coordinate system, P9. This fact reflects in Table 5, and the forward kinematics of right and left hands is
 \begin{equation}\text{Right hand:}\ {}^0{T_8} = {}^0{T_1}{}^1{T_2}{}^2{T_3}{}^3{T_4}{}^4{T_5}{}^5{T_6}{}^6{T_7}{}^7{T_8},\ \text{and}\end{equation}
\begin{equation}\text{Right hand:}\ {}^0{T_8} = {}^0{T_1}{}^1{T_2}{}^2{T_3}{}^3{T_4}{}^4{T_5}{}^5{T_6}{}^6{T_7}{}^7{T_8},\ \text{and}\end{equation}
 \begin{equation}\text{Left hand:}\ {}^0{T_9} = {}^0{T_1}{}^1{T_2}{}^2{T_3}{}^3{T_4}{}^4{T_5}{}^5{T_6}{}^6{T_9},\ \text{respectively.}\end{equation}
\begin{equation}\text{Left hand:}\ {}^0{T_9} = {}^0{T_1}{}^1{T_2}{}^2{T_3}{}^3{T_4}{}^4{T_5}{}^5{T_6}{}^6{T_9},\ \text{respectively.}\end{equation}
Note that the parameters shown in Table 5 are a 0 = 115 mm, a 1 = 140 mm, a 2 = 225 mm, a 3 = 130 mm, a 4 = 80 mm, and a 5 = 50 mm, respectively. In the next section, the motion planning of holding the bow and shooting a string must apply the above forward kinematic equations.
Table 4 The parameter table of both hands
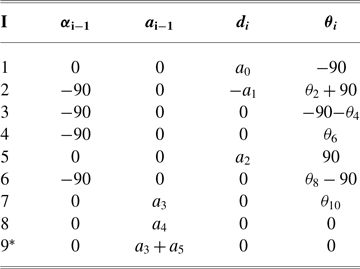
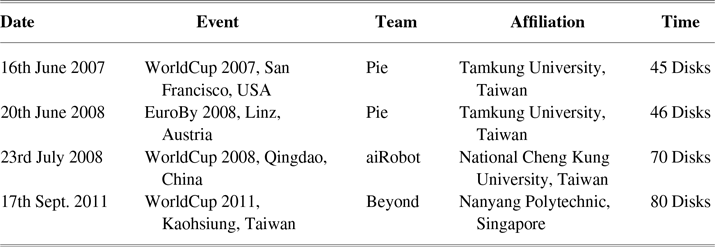
Table 5 The world record of HuroCup on kid-sized weight lifting
3 Humanoid robot motion planning for archery
In addition to archery, the humanoid robot needs to play other nine events. The humanoid robot hardware including hands cannot be modified for only archery. In this section, the special motion planning of both hands of humanoid robot to produce much torque is proposed.
In the human–robot archery competition, the humanoid robot must engage professional bows. Usually, the professional bow is installed by strong string. In consideration of our humanoid robot hand torque, the archery bow with length 48 inches, weight 0.7 kg, and string 12 pounds (about 5.4 kg) is chosen for the competition. But, the motors of our humanoid robot hands cannot directly produce 12-pound torque to pull the bow’s string. Thus, the motion planning of both hands to simultaneously pull the string is proposed.
The special motion planning of the archery shooting is separated into three postures: (1) prepare, (2) the beginning of pulling string, and (3) shooting. Prepare posture is the initial step to get ready for the start of shooting. At this posture, the humanoid robot takes the bow and arrow on lower position, as shown in Figure 9 (1). Because the bow weight is 0.7 kg and the torque to pull string is about 5.4 kg, in idea calculation, one motor of humanoid robot hands owns 6 Nm torque, and it can pull the string only 21.2 cm length. But, this bow size used by our humanoid must pull the string length to 500 cm. Therefore, the motor torque of the humanoid robot is not enough to take the bow up and to pull the string. Instead of taking the bow up and pulling its string to avoid overcoming gravity, the humanoid robot goes into postures (2). Therefore, the shooting procedure going postures from (1) to (2) is to take the bow and arrow, not pulling string. Figure 9 (2) shows the humanoid robot on posture (2), the beginning of pulling string. Anyway, posture (2) for shooting is most difficult in the shooting procedure. The beginning of pulling string is the bow and arrow on the top of the humanoid robot body. The motion planning is the posture from postures (2) to (3). The motion planning from top to down to pull string simultaneously makes use of left and right hands to produce much torque. In this step, the benefit of pulling string from top to down can borrow the gravity of bow to produce much torque as well. The action of posture (3) is to move arrow to aim at the target center, as shown in Figure 9 (3). After planning the three postures, the time trajectories of all joints of both hands can be resulted from Equations (1) to (3). Figure 10 shows the time trajectories of all hand joints to complete the shooting procedure.
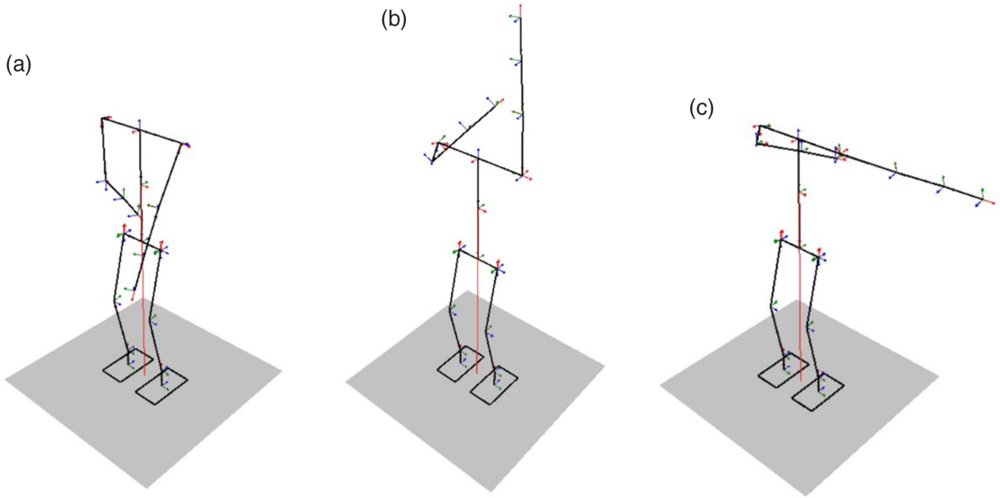
Figure 9 Three postures of the humanoid robot to play archery

Figure 10 The time trajectories of joint angles planned for shooting procedure
The shooting procedure is exactly implemented for our humanoid robot. During the shooting, three postures of the actual humanoid robot are shown in Figures 11–13, respectively.

Figure 11 The archery shooting posture (1): prepare

Figure 12 The archery shooting posture (2): pulling string

Figure 13 The archery shooting posture (3): shooting
4 Robot–humanoid archery challenge
The competition of human–robot archery challenge engages international Olympia rule. Under the rule, in every game, each team owns three arrows to count the shooting score. The team getting more shooting score wins the game and gets two points. The team that loses the game gets zero point. If both teams get the same score, both teams get one point, respectively. In a match, they play more games until one team gets six points. The team that first gets six points wins the match.
In the competition, Chung Kong Senior High School from human teams and NKUST from humanoid robot teams went to finalize the championship. In the championship competition, because of missing the humanoid robot calibration, NKUST lost the first two games. Therefore, Chung Kong Senior High School got points from the first two games. In the third game, NKUST got top 10 scores on the first two arrows and had same score with Chung Kong Senior High School. Unfortunately, NKUST missed camera tracking and only got 9 scores on the third arrow. Therefore, NKUST lost the third game too. Finally, Chung Kong Senior High School got championship, and NKUST only got second place.
Before the archery competition, we took our humanoid robots to visit Tiachung Archery Club for more archery shooting learning and practical. Our learning and practical are together with human teams, Dode Elementary School and Chung Kong Senior High School. The authors, Jacky Baltes and Kuo-Yang Tu went together to learn more about professional shooting skill. Then, we can know how to adjust and improve our humanoid robot archery shooting. We made the learning and practical archery shooting at Taichung club in video as shown in https://youtu.be/ernjVNQrj68.
5 Conclusions and further development
HuroCup is organized to develop full capability humanoid robots. From 2002 start, the capability of humanoid robot development is improved quickly. As shown in Table 1 for sprint, the humanoid robots can walk much quickly. As shown in Table 2 for marathon, the humanoid robots can walk longer. As shown in Table 5 for weight lifting, the humanoid robots can pick up heavier bar. Through the HuroCup competition, researchers are gathered to improve humanoid robot capability.
On FIRA 2018, a great challenge of human–robot archery competition is organized. Although human won the archery competition, it is a great step of humanoid robot research. In addition, the complex and redundant structure of humanoid robot is engaged to develop much torque of dual arm action based a sequent postures for archery shooting. We may conclude that similar to human, humanoid robots are possible to complete the challenge we cannot image.
It is not only the progress of humanoid robot research but also robot in human life. At present, humanoid robots can challenge the skills of human athletes. In the future, humanoid robots are possible to beat human athletes. To play with athletes, humanoid robots are very exciting and interactive with human. It is a good way to develop robots in human life under controllable safety. It brings us bright imagination on robotics for the industries of competition, entertainment, and so on. This research is inductive on the bright trend of robots in human life in the future.


















