



1. Introduction
Fluid flow and solute transport in porous media occur in a wide variety of situations, including contaminant transport (Brusseau Reference Brusseau1994; Quintard & Whitaker Reference Quintard and Whitaker1994), lithium-ion batteries (Li et al. Reference Li2018), hydrogeological systems (Domenico & Schwartz Reference Domenico and Schwartz1990), biofilms (Davit et al. Reference Davit, Byrne, Osborne, Pitt-Francis, Gavaghan and Quintard2013b), bones (Fritton & Weinbaum Reference Fritton and Weinbaum2009) and soils (Daly & Roose Reference Daly and Roose2015). Many of these porous media, including soils, rocks and biological tissues, are intrinsically heterogeneous and/or anisotropic at the pore scale, and macroscopic flow and transport in these systems are known to depend critically on pore structure and pore-scale fluid–solid interactions. For example, complex flow patterns and the resulting solute transport are believed to be crucial to the ecohydrology of peatlands, and have been attributed to the pore-scale heterogeneity and anisotropy of peat soil (Beckwith, Baird & Heathwaite Reference Beckwith, Baird and Heathwaite2003; Wang et al. Reference Wang, Liu, Zak and Lennartz2020). Clavaud et al. (Reference Clavaud, Maineult, Zamora, Rasolofosaon and Schlitter2008) used imaging to study the relationship between pore geometry and permeability anisotropy in sandstone, limestone and volcanic rocks, finding that macroscopic flow properties depend on the details of the pore structure across these different rock types. O'Dea et al. (Reference O'Dea, Nelson, El Haj, Waters and Byrne2015) used modelling in the context of tissue engineering to show that microstructure induces anisotropy in flow properties, highlighting the role of microstructure in determining flow patterns and nutrient delivery. Changes in pore structure can also lead to large deviations from macroscopic models derived for homogeneous microstructures; for example, Rosti et al. (Reference Rosti, Pramanik, Brandt and Mitra2020) found that microstructural changes due to deformation of the solid skeleton can lead to a breakdown of Darcy's law. Ultimately, many aspects of the impacts of pore structure on macroscale flow and transport behaviour remain poorly understood. We focus here on the specific roles of pore-scale heterogeneity and anisotropy in the context of a simple, two-dimensional model problem.
Porous media are characterised by at least two distinct length scales: the characteristic length of each pore/solid grain (the pore scale) and the characteristic length of the porous medium itself (the macroscale) (Tomin & Lunati Reference Tomin and Lunati2016). Studying the impact of the pore structure on flow, transport and sorption via direct numerical simulation (DNS) in a complex geometry is computationally expensive, and can be prohibitively so when the pore-scale and macroscale lengths differ by orders of magnitude. For example, Olivieri et al. (Reference Olivieri, Akoush, Brandt, Rosti and Mazzino2020) used DNS to study turbulent flow through a cube containing randomly distributed solid fibres, considering up to 1000 fibres of length  $1/2$ in a cube of side length
$1/2$ in a cube of side length  $2{\rm \pi}$. Similarly, Kuwata & Suga (Reference Kuwata and Suga2017) used DNS to study turbulent flow through a channel with a porous bed; the bed was four pores thick, with a square-frame structure. For a large number of obstacles or pores, as would be relevant to practical applications, one way to deal with these disparate length scales is to systematically derive an upscaled macroscale model that is uniformly valid on the entire porous medium, and that contains pertinent pore-scale information via the permeability, effective diffusivity and an effective source/sink term.
$2{\rm \pi}$. Similarly, Kuwata & Suga (Reference Kuwata and Suga2017) used DNS to study turbulent flow through a channel with a porous bed; the bed was four pores thick, with a square-frame structure. For a large number of obstacles or pores, as would be relevant to practical applications, one way to deal with these disparate length scales is to systematically derive an upscaled macroscale model that is uniformly valid on the entire porous medium, and that contains pertinent pore-scale information via the permeability, effective diffusivity and an effective source/sink term.
There are many common methods for upscaling, including the method of moments, renormalisation group theory and homogenisation via volume averaging or the method of multiple scales (MMS) (Salles et al. Reference Salles, Thovert, Delannay, Prevors, Auriault and Adler1993; Hornung Reference Hornung1996; Wood et al. Reference Wood, Cherblanc, Quintard and Whitaker2003; Mei & Vernescu Reference Mei and Vernescu2010; Bensoussan, Lions & Papanicolaou Reference Bensoussan, Lions and Papanicolaou2011). These different methods have been compared with each other and with DNS (e.g. Salles et al. Reference Salles, Thovert, Delannay, Prevors, Auriault and Adler1993; Davit et al. Reference Davit2013a; Kuwata & Suga Reference Kuwata and Suga2017). The two homogenisation methods, in particular, lead to the same macroscale equations via different routes. In essence, both methods identify the governing equations on the pore scale, which are subject to closure conditions, and use this pore-scale problem to derive a system of equations over the macroscale. The formal nature of the MMS enables the determination of higher-order corrections to the leading-order macroscale equations. In contrast, volume averaging can be more physically intuitive (e.g. Whitaker Reference Whitaker1986, Reference Whitaker2013; Wood et al. Reference Wood, Cherblanc, Quintard and Whitaker2003; Davit et al. Reference Davit2013a) but it is more difficult to determine higher-order corrections and thereby quantify errors.
Classic homogenisation requires the microstructure to be strictly periodic at some scale. This requires a ‘periodic cell’ for the MMS (Mauri Reference Mauri1991; Salles et al. Reference Salles, Thovert, Delannay, Prevors, Auriault and Adler1993; Chapman, Shipley & Jawad Reference Chapman, Shipley and Jawad2008; Shipley & Chapman Reference Shipley and Chapman2010) and a ‘representative elementary volume’ for volume averaging (Auriault Reference Auriault1991; Davit et al. Reference Davit2013a). However, recent work has extended the former technique to allow for slowly varying microstructure (i.e. microstructure that is only locally periodic) (e.g. van Noorden Reference van Noorden2009; van Noorden & Muntean Reference van Noorden and Muntean2011; Richardson & Chapman Reference Richardson and Chapman2011; Valdés-Parada & Alvarez-Ramírez Reference Valdés-Parada and Alvarez-Ramírez2011; Ray et al. Reference Ray, van Noorden, Frank and Knabner2012; Muntean & Nikolopoulos Reference Muntean and Nikolopoulos2020; Bruna & Chapman Reference Bruna and Chapman2015; Dalwadi, Griffiths & Bruna Reference Dalwadi, Griffiths and Bruna2015; Dalwadi, Bruna & Griffiths Reference Dalwadi, Bruna and Griffiths2016). Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015), in particular, considered diffusive and advective transport through an array of impermeable obstacles to which solute can adhere, allowing for slow variation of obstacle size while requiring uniform cell size.
Here, we study the impact of slowly varying pore structure on macroscopic flow, transport and sorption within a porous medium. Specifically, we consider steady flow through a heterogeneous, two-dimensional porous material comprising an array of solid obstacles. We allow for slow but arbitrary longitudinal variations in the size of obstacles, as in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015, Reference Dalwadi, Bruna and Griffiths2016), and also in their spacing. We begin by developing a general model for homogenised flow and transport for arbitrary obstacle shape, size and spacing. We then develop detailed results for the simple case of circular obstacles. A key novelty of this approach is that allowing for two degrees of microstructural freedom affords a rich parameter space for exploration, including, for example, the ability to have a heterogeneous microstructure while maintaining uniform porosity, and allowing for a specific study of anisotropy. Mathematically, varying the longitudinal spacing requires dealing with a varying cell size in the homogenisation procedure. Doing so is non-trivial, and adds a frequency modulation to the problem in addition to the typical amplitude modulation associated with homogenisation via the MMS (Chapman & McBurnie Reference Chapman and McBurnie2011).
For the flow, we assume steady Stokes flow with no-slip and no-penetration conditions on the solid surfaces. For solute transport, we consider transient advection and diffusion with removal via adsorption on the solid surfaces (§ 2). Following Chapman & McBurnie (Reference Chapman and McBurnie2011), Richardson & Chapman (Reference Richardson and Chapman2011), Bruna & Chapman (Reference Bruna and Chapman2015), Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) and Dalwadi et al. (Reference Dalwadi, Bruna and Griffiths2016), we exploit the local periodicity of the pore geometry to homogenise the pore-scale problem via the MMS (§ 3). Since we consider a microstructure in which both the size and the spacing of the solid obstacles vary slowly along the length of the porous material, the total area of each cell also varies slowly. The homogenisation method provides effective macroscopic equations for fluid flow, solute transport and sorption that are uniformly valid throughout the heterogeneous porous medium. For any particular microstructural geometry, the permeability and effective diffusivity tensors we derive must be determined numerically. In this manuscript, we demonstrate the general approach by calculating these tensors for a specific filter geometry comprising an array of circular obstacles arranged on a rectangular lattice. These tensors are strongly anisotropic, highlighting the fact that porosity alone is an insufficient measure of pore structure (§ 4). We use the homogenised model to investigate the effects of heterogeneous pore structure in a simple one-dimensional steady-state filtration problem (§ 4.2). Finally, we discuss the merits and limitations of the model (§ 5).
2. Model problem
We consider the steady flow of fluid carrying a passive solute through a rigid porous medium in two dimensions. The solute advects, diffuses and is removed via adsorption to the solid structure. The spatial coordinate is  $\tilde {\boldsymbol {x}}:=\tilde {x}_1\boldsymbol {e}_1+\tilde {x}_2\boldsymbol {e}_2$, with
$\tilde {\boldsymbol {x}}:=\tilde {x}_1\boldsymbol {e}_1+\tilde {x}_2\boldsymbol {e}_2$, with  $\tilde {x}_1$ and
$\tilde {x}_1$ and  $\tilde {x}_2$ the dimensional longitudinal and transverse coordinates, respectively, and
$\tilde {x}_2$ the dimensional longitudinal and transverse coordinates, respectively, and  $\boldsymbol {e}_1$ and
$\boldsymbol {e}_1$ and  $\boldsymbol {e}_2$ the longitudinal and transverse unit vectors, respectively. The fluid enters the porous medium uniformly through the inlet at the left (
$\boldsymbol {e}_2$ the longitudinal and transverse unit vectors, respectively. The fluid enters the porous medium uniformly through the inlet at the left ( $\tilde {x}_1=0$) and exits the porous medium through the outlet at the right (
$\tilde {x}_1=0$) and exits the porous medium through the outlet at the right ( $\tilde {x}_1 = \tilde {L}$) (figure 1). We denote dimensional quantities with a tilde.
$\tilde {x}_1 = \tilde {L}$) (figure 1). We denote dimensional quantities with a tilde.

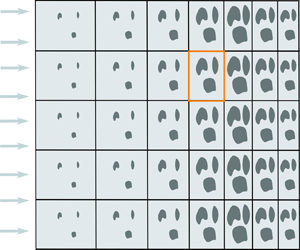
Figure 1. We consider the flow of fluid carrying solute through a heterogeneous porous material in two dimensions. The porous medium has length  $\tilde {L}$ and comprises an array of obstacles. The size of these obstacles depends only on a scale factor
$\tilde {L}$ and comprises an array of obstacles. The size of these obstacles depends only on a scale factor  $\varLambda (\tilde {x}_1)$, located within each rectangular cell of transverse height
$\varLambda (\tilde {x}_1)$, located within each rectangular cell of transverse height  $\tilde {h}$ and longitudinal width
$\tilde {h}$ and longitudinal width  $A(\tilde {x}_1)\tilde {h}$. The porous medium is thus uniform in the transverse (
$A(\tilde {x}_1)\tilde {h}$. The porous medium is thus uniform in the transverse ( $\tilde {x}_2$) direction but heterogeneous in the longitudinal (
$\tilde {x}_2$) direction but heterogeneous in the longitudinal ( $\tilde {x}_1$) direction. We assume that the spacing between obstacles is small relative to the length of the porous medium:
$\tilde {x}_1$) direction. We assume that the spacing between obstacles is small relative to the length of the porous medium:  $\epsilon := {\tilde {h}}/{\tilde {L}} \ll 1$. The cell highlighted in orange is shown in detail in figure 2.
$\epsilon := {\tilde {h}}/{\tilde {L}} \ll 1$. The cell highlighted in orange is shown in detail in figure 2.
The entire domain of the porous medium, denoted  $\tilde {\varOmega }$, comprises both the fluid and the solid structure. The latter constitutes an array of solid obstacles, as discussed in more detail below. We assume that the solute particles are small relative to the solid obstacles, and we measure the local density of solute (amount of solute per volume of fluid) via the concentration field
$\tilde {\varOmega }$, comprises both the fluid and the solid structure. The latter constitutes an array of solid obstacles, as discussed in more detail below. We assume that the solute particles are small relative to the solid obstacles, and we measure the local density of solute (amount of solute per volume of fluid) via the concentration field  $\tilde {c}(\tilde {\boldsymbol {x}},\tilde {t})$, where
$\tilde {c}(\tilde {\boldsymbol {x}},\tilde {t})$, where  $\tilde {t}$ is dimensional time. This concentration field is defined within the fluid phase of the porous medium, denoted
$\tilde {t}$ is dimensional time. This concentration field is defined within the fluid phase of the porous medium, denoted  $\tilde {\varOmega }_f$.
$\tilde {\varOmega }_f$.
Note that we do not track solute once it has adsorbed to the solid surface, and we neglect any impact of this adsorption on the size of the obstacles. The latter point is justified by our assumption that the solute particles are negligible in size relative to the obstacles, and also because we are interested in macroscopic advective time scales, which are typically far shorter than those of solute accumulation and blocking.
The porous medium can be partitioned into an array of rectangular cells of fixed height  $\tilde {h}$ and varying width
$\tilde {h}$ and varying width  $A(\tilde {x}_1)\tilde {h}$, where
$A(\tilde {x}_1)\tilde {h}$, where  $A$ is the dimensionless aspect ratio. Each cell contains fixed and rigid obstacles of smooth but arbitrary shape. The shape of each obstacle is fixed but the surface area of each obstacle varies with
$A$ is the dimensionless aspect ratio. Each cell contains fixed and rigid obstacles of smooth but arbitrary shape. The shape of each obstacle is fixed but the surface area of each obstacle varies with  $\tilde{x}_1$. We define a scale factor
$\tilde{x}_1$. We define a scale factor  $\varLambda(\tilde{x}_1)$, which controls the variation in surface area of the obstacles over the porous material. Between adjacent cells the only allowed variation in the obstacles' surface area is isotropic growth centred about each obstacle's respective centre of mass. The solid domain is the union of these obstacles, and is denoted
$\varLambda(\tilde{x}_1)$, which controls the variation in surface area of the obstacles over the porous material. Between adjacent cells the only allowed variation in the obstacles' surface area is isotropic growth centred about each obstacle's respective centre of mass. The solid domain is the union of these obstacles, and is denoted  $\tilde {\varOmega }_s:= \tilde {\varOmega }\setminus \tilde {\varOmega }_f$. This construction leads to a porous medium whose properties vary in the longitudinal direction but not in the transverse direction (see figure 1). We further assume that the porous medium is composed of a large number of obstacles in the longitudinal direction, which requires
$\tilde {\varOmega }_s:= \tilde {\varOmega }\setminus \tilde {\varOmega }_f$. This construction leads to a porous medium whose properties vary in the longitudinal direction but not in the transverse direction (see figure 1). We further assume that the porous medium is composed of a large number of obstacles in the longitudinal direction, which requires  $\epsilon := \tilde {h}/\tilde {L}\ll 1$ with
$\epsilon := \tilde {h}/\tilde {L}\ll 1$ with  $A=O(1)$.
$A=O(1)$.
We assume that the fluid is incompressible and Newtonian, and that the flow is steady and dominated by viscosity. As such, the fluid velocity  $\tilde {\boldsymbol {v}}(\tilde {\boldsymbol {x}})$ and pressure
$\tilde {\boldsymbol {v}}(\tilde {\boldsymbol {x}})$ and pressure  $\tilde {p}(\tilde {\boldsymbol {x}})$ satisfy the Stokes equations, subject to no-slip and no-penetration boundary conditions on the solid obstacles,
$\tilde {p}(\tilde {\boldsymbol {x}})$ satisfy the Stokes equations, subject to no-slip and no-penetration boundary conditions on the solid obstacles,
 $$\begin{gather} -\tilde{\boldsymbol{\nabla}}\tilde{p}+\tilde{\mu}\tilde{\nabla}^2\tilde{\boldsymbol{v}} = \boldsymbol{0}, \quad \tilde{\boldsymbol{x}}\in\tilde{\varOmega}_f, \end{gather}$$
$$\begin{gather} -\tilde{\boldsymbol{\nabla}}\tilde{p}+\tilde{\mu}\tilde{\nabla}^2\tilde{\boldsymbol{v}} = \boldsymbol{0}, \quad \tilde{\boldsymbol{x}}\in\tilde{\varOmega}_f, \end{gather}$$ $$\begin{gather}\tilde{\boldsymbol{\nabla}}\boldsymbol{\cdot}\tilde{\boldsymbol{v}} = 0, \quad \tilde{\boldsymbol{x}}\in\tilde{\varOmega}_f, \end{gather}$$
$$\begin{gather}\tilde{\boldsymbol{\nabla}}\boldsymbol{\cdot}\tilde{\boldsymbol{v}} = 0, \quad \tilde{\boldsymbol{x}}\in\tilde{\varOmega}_f, \end{gather}$$ $$\begin{gather}\tilde{\boldsymbol{v}} = \boldsymbol{0}, \quad \tilde{\boldsymbol{x}}\in \partial\tilde{\varOmega}_s, \end{gather}$$
$$\begin{gather}\tilde{\boldsymbol{v}} = \boldsymbol{0}, \quad \tilde{\boldsymbol{x}}\in \partial\tilde{\varOmega}_s, \end{gather}$$
where  $\tilde {\mu }$ is the dynamic viscosity of the fluid,
$\tilde {\mu }$ is the dynamic viscosity of the fluid,  $\partial \tilde {\varOmega }_s$ denotes the fluid–solid interface and
$\partial \tilde {\varOmega }_s$ denotes the fluid–solid interface and  $\tilde {\boldsymbol {\nabla }}$ is the gradient operator with respect to
$\tilde {\boldsymbol {\nabla }}$ is the gradient operator with respect to  $\tilde {\boldsymbol {x}}$.
$\tilde {\boldsymbol {x}}$.
We model solute transport and adsorption via the standard advection–diffusion equation with a linear, partially adsorbing condition at the fluid–solid interface
 \begin{gather} \frac{\partial \tilde{c}}{\partial \tilde{t}} = \tilde{\boldsymbol{\nabla}}\boldsymbol{\cdot}\left(\tilde{\mathcal{D}}\tilde{\boldsymbol{\nabla}}\tilde{c}-\tilde{\boldsymbol{v}}\tilde{c}\right), \quad \tilde{\boldsymbol{x}}\in\tilde{\varOmega}_f, \end{gather}
\begin{gather} \frac{\partial \tilde{c}}{\partial \tilde{t}} = \tilde{\boldsymbol{\nabla}}\boldsymbol{\cdot}\left(\tilde{\mathcal{D}}\tilde{\boldsymbol{\nabla}}\tilde{c}-\tilde{\boldsymbol{v}}\tilde{c}\right), \quad \tilde{\boldsymbol{x}}\in\tilde{\varOmega}_f, \end{gather} \begin{gather} -\tilde{\gamma}\tilde{c} = \tilde{\boldsymbol{n}}_s\boldsymbol{\cdot}\left(\tilde{\mathcal{D}}\tilde{\boldsymbol{\nabla}}\tilde{c}-\tilde{\boldsymbol{v}}\tilde{c}\right), \quad \tilde{\boldsymbol{x}}\in \partial\tilde{\varOmega}_s, \end{gather}
\begin{gather} -\tilde{\gamma}\tilde{c} = \tilde{\boldsymbol{n}}_s\boldsymbol{\cdot}\left(\tilde{\mathcal{D}}\tilde{\boldsymbol{\nabla}}\tilde{c}-\tilde{\boldsymbol{v}}\tilde{c}\right), \quad \tilde{\boldsymbol{x}}\in \partial\tilde{\varOmega}_s, \end{gather}
where  $\tilde {\mathcal {D}}$ is the coefficient of molecular diffusion,
$\tilde {\mathcal {D}}$ is the coefficient of molecular diffusion,  $\tilde {\boldsymbol {n}}_s$ is the outward-facing unit normal to
$\tilde {\boldsymbol {n}}_s$ is the outward-facing unit normal to  $\partial \tilde {\varOmega }_s$ and
$\partial \tilde {\varOmega }_s$ and  $\tilde {\gamma } \geq 0$ is the constant adsorption coefficient. Note that the second term on the right-hand side of (2.2b) vanishes due to (2.1c). Further, note that
$\tilde {\gamma } \geq 0$ is the constant adsorption coefficient. Note that the second term on the right-hand side of (2.2b) vanishes due to (2.1c). Further, note that  $\tilde {\gamma } = 0$ corresponds to no adsorption and
$\tilde {\gamma } = 0$ corresponds to no adsorption and  $\tilde {\gamma }\to \infty$ corresponds to instantaneous adsorption, where the latter is equivalent to imposing
$\tilde {\gamma }\to \infty$ corresponds to instantaneous adsorption, where the latter is equivalent to imposing  $\tilde {c} = 0$ on
$\tilde {c} = 0$ on  $\partial \tilde {\varOmega }_s$.
$\partial \tilde {\varOmega }_s$.
We define a function  $\tilde {f}_s(\tilde {\boldsymbol {x}})$ that vanishes on the fluid–solid interface,
$\tilde {f}_s(\tilde {\boldsymbol {x}})$ that vanishes on the fluid–solid interface,
 \begin{equation} \tilde{f}_s(\tilde{\boldsymbol{x}}) = 0\ {\rm on}\quad \partial\tilde{\varOmega}_s, \end{equation}
\begin{equation} \tilde{f}_s(\tilde{\boldsymbol{x}}) = 0\ {\rm on}\quad \partial\tilde{\varOmega}_s, \end{equation}
where we take  $\tilde {f}_s(\tilde {\boldsymbol {x}})>0$ inside the solid phase. Then,
$\tilde {f}_s(\tilde {\boldsymbol {x}})>0$ inside the solid phase. Then,
 \begin{equation} \tilde{\boldsymbol{n}}_s(\tilde{\boldsymbol{x}}) := \frac{\tilde{\boldsymbol{\nabla}}\tilde{f}_s}{\left|\tilde{\boldsymbol{\nabla}}\tilde{f}_s\right|}\end{equation}
\begin{equation} \tilde{\boldsymbol{n}}_s(\tilde{\boldsymbol{x}}) := \frac{\tilde{\boldsymbol{\nabla}}\tilde{f}_s}{\left|\tilde{\boldsymbol{\nabla}}\tilde{f}_s\right|}\end{equation}is the outward-facing normal to the fluid domain.
We make (2.1)–(2.2) dimensionless via the scalings
 \begin{equation} \tilde{\boldsymbol{x}} = \tilde{L}\hat{\boldsymbol{x}}, \quad \tilde{\boldsymbol{v}} = \tilde{\mathcal{V}}\hat{\boldsymbol{v}}, \quad \tilde{p} = \left(\frac{\tilde{\mu} \tilde{\mathcal{V}}}{\epsilon^2\tilde{L}}\right)\hat{p}, \quad \tilde{c} = \tilde{\mathcal{C}} \hat{c}, \quad\text{and}\quad \tilde{t} = \left(\frac{\tilde{L}^2}{\tilde{\mathcal{D}}}\right)t, \end{equation}
\begin{equation} \tilde{\boldsymbol{x}} = \tilde{L}\hat{\boldsymbol{x}}, \quad \tilde{\boldsymbol{v}} = \tilde{\mathcal{V}}\hat{\boldsymbol{v}}, \quad \tilde{p} = \left(\frac{\tilde{\mu} \tilde{\mathcal{V}}}{\epsilon^2\tilde{L}}\right)\hat{p}, \quad \tilde{c} = \tilde{\mathcal{C}} \hat{c}, \quad\text{and}\quad \tilde{t} = \left(\frac{\tilde{L}^2}{\tilde{\mathcal{D}}}\right)t, \end{equation}
where  $\tilde {{\mathcal {V}}}$ and
$\tilde {{\mathcal {V}}}$ and  $\tilde {\mathcal {{C}}}$ are typical inlet velocities and concentrations, respectively;
$\tilde {\mathcal {{C}}}$ are typical inlet velocities and concentrations, respectively;  $\boldsymbol {\hat {x}}$ and
$\boldsymbol {\hat {x}}$ and  $t$ denote the dimensionless spatial and temporal coordinates, respectively; and
$t$ denote the dimensionless spatial and temporal coordinates, respectively; and  $\hat {\boldsymbol {v}}= \hat {\boldsymbol {v}}(\boldsymbol {\hat {x}})$,
$\hat {\boldsymbol {v}}= \hat {\boldsymbol {v}}(\boldsymbol {\hat {x}})$,  $\hat {p}= \hat {p}(\boldsymbol {\hat {x}})$ and
$\hat {p}= \hat {p}(\boldsymbol {\hat {x}})$ and  $\hat {c}= \hat {c}(\boldsymbol {\hat {x}},t)$ denote the dimensionless velocity, pressure and concentrations fields, respectively. This pressure scale balances the macroscopic pressure gradient against viscous dissipation at the pore scale, as is standard in lubrication problems. Employing the scalings in (2.5a–e), the flow problem (2.1) becomes
$\hat {c}= \hat {c}(\boldsymbol {\hat {x}},t)$ denote the dimensionless velocity, pressure and concentrations fields, respectively. This pressure scale balances the macroscopic pressure gradient against viscous dissipation at the pore scale, as is standard in lubrication problems. Employing the scalings in (2.5a–e), the flow problem (2.1) becomes
 $$\begin{gather} -\hat{\boldsymbol{\nabla}}\hat{p}+\epsilon^2 \hat{{\nabla}}^2{\hat{\boldsymbol{v}}} = \boldsymbol{0}, \quad \hat{\boldsymbol{x}}\in\hat{\varOmega}_f, \end{gather}$$
$$\begin{gather} -\hat{\boldsymbol{\nabla}}\hat{p}+\epsilon^2 \hat{{\nabla}}^2{\hat{\boldsymbol{v}}} = \boldsymbol{0}, \quad \hat{\boldsymbol{x}}\in\hat{\varOmega}_f, \end{gather}$$ $$\begin{gather}\hat{\boldsymbol{\nabla}}\boldsymbol{\cdot}{\hat{\boldsymbol{v}}} = 0, \quad \hat{\boldsymbol{x}}\in\hat{\varOmega}_f, \end{gather}$$
$$\begin{gather}\hat{\boldsymbol{\nabla}}\boldsymbol{\cdot}{\hat{\boldsymbol{v}}} = 0, \quad \hat{\boldsymbol{x}}\in\hat{\varOmega}_f, \end{gather}$$ $$\begin{gather}\hat{\boldsymbol{v}} = \boldsymbol{0}, \quad \hat{\boldsymbol{x}}\in \partial\hat{\varOmega}_s, \end{gather}$$
$$\begin{gather}\hat{\boldsymbol{v}} = \boldsymbol{0}, \quad \hat{\boldsymbol{x}}\in \partial\hat{\varOmega}_s, \end{gather}$$
where  $\hat {\boldsymbol {\nabla }}$ is the gradient operator with respect to
$\hat {\boldsymbol {\nabla }}$ is the gradient operator with respect to  $\hat {\boldsymbol {x}}$. Similarly, the transport problem (2.2) becomes
$\hat {\boldsymbol {x}}$. Similarly, the transport problem (2.2) becomes
 $$\begin{gather} \frac{\partial {\hat{c}}}{\partial {t}} = {\hat{\boldsymbol{\nabla}}}\boldsymbol{\cdot}\left(\hat{{\boldsymbol{\nabla}}}{\hat{c}}-Pe\ {\hat{\boldsymbol{v}}}\hat{c}\right), \ \quad \hat{\boldsymbol{x}}\in\hat{\varOmega}_f, \end{gather}$$
$$\begin{gather} \frac{\partial {\hat{c}}}{\partial {t}} = {\hat{\boldsymbol{\nabla}}}\boldsymbol{\cdot}\left(\hat{{\boldsymbol{\nabla}}}{\hat{c}}-Pe\ {\hat{\boldsymbol{v}}}\hat{c}\right), \ \quad \hat{\boldsymbol{x}}\in\hat{\varOmega}_f, \end{gather}$$ $$\begin{gather}-\epsilon\gamma\hat{c} = \hat{\boldsymbol{n}}_s\boldsymbol{\cdot}\left(\hat{{\boldsymbol{\nabla}}}\hat{c}-Pe\ {\hat{\boldsymbol{v}}}\hat{c}\right), \quad \hat{\boldsymbol{x}}\in \partial\hat{\varOmega}_s, \end{gather}$$
$$\begin{gather}-\epsilon\gamma\hat{c} = \hat{\boldsymbol{n}}_s\boldsymbol{\cdot}\left(\hat{{\boldsymbol{\nabla}}}\hat{c}-Pe\ {\hat{\boldsymbol{v}}}\hat{c}\right), \quad \hat{\boldsymbol{x}}\in \partial\hat{\varOmega}_s, \end{gather}$$
where  $\hat {\boldsymbol {n}}_s(\hat {\boldsymbol {x}})$, a function of
$\hat {\boldsymbol {n}}_s(\hat {\boldsymbol {x}})$, a function of  $\hat {\boldsymbol {x}}$, is the outward-facing normal to
$\hat {\boldsymbol {x}}$, is the outward-facing normal to  $\hat {\varOmega }_f$, the Péclet number
$\hat {\varOmega }_f$, the Péclet number  $Pe:= {\tilde {L}\tilde {\mathcal {V}}}/\tilde {\mathcal {D}}$ measures the rate of advective transport relative to that of diffusive transport and the dimensionless adsorption rate
$Pe:= {\tilde {L}\tilde {\mathcal {V}}}/\tilde {\mathcal {D}}$ measures the rate of advective transport relative to that of diffusive transport and the dimensionless adsorption rate  $\gamma :={\tilde {\gamma } \tilde {L}}/{(\epsilon \tilde {\mathcal {D}})}$ measures the rate of adsorption relative to that of diffusive transport. Note that
$\gamma :={\tilde {\gamma } \tilde {L}}/{(\epsilon \tilde {\mathcal {D}})}$ measures the rate of adsorption relative to that of diffusive transport. Note that  $\gamma \equiv {Da}/\epsilon$, where
$\gamma \equiv {Da}/\epsilon$, where  ${Da}=\tilde {\gamma }/\tilde {\mathcal {V}}$ is the Damköhler number of the second kind. As discussed in more detail below, the subsequent analysis requires that
${Da}=\tilde {\gamma }/\tilde {\mathcal {V}}$ is the Damköhler number of the second kind. As discussed in more detail below, the subsequent analysis requires that  $Pe,\gamma = O(1)$ are constants independent of
$Pe,\gamma = O(1)$ are constants independent of  $\epsilon$, which represents a distinguished limit as highlighted below.
$\epsilon$, which represents a distinguished limit as highlighted below.
Finally, the dimensionless fluid–solid interface becomes  $\hat {f}_s(\hat {\boldsymbol {x}}) = 0$ and (2.4) becomes
$\hat {f}_s(\hat {\boldsymbol {x}}) = 0$ and (2.4) becomes
 \begin{equation} \hat{\boldsymbol{n}}_s(\hat{\boldsymbol{x}}) := \frac{\hat{\boldsymbol{\nabla}}\hat{f}_s}{\left|\hat{\boldsymbol{\nabla}}\hat{f}_s\right|}. \end{equation}
\begin{equation} \hat{\boldsymbol{n}}_s(\hat{\boldsymbol{x}}) := \frac{\hat{\boldsymbol{\nabla}}\hat{f}_s}{\left|\hat{\boldsymbol{\nabla}}\hat{f}_s\right|}. \end{equation}3. Homogenisation
Here, we approach the problem above with homogenisation via the MMS. Classically, homogenisation via the MMS is an asymptotic technique for domains that can be represented as the union of a large number of strictly periodic cells (Chapman et al. Reference Chapman, Shipley and Jawad2008). Here we use an extension of the method to deal with materials with a locally periodic microstructure that can vary over the macroscale (Chapman & McBurnie Reference Chapman and McBurnie2011; Richardson & Chapman Reference Richardson and Chapman2011; Bruna & Chapman Reference Bruna and Chapman2015; Dalwadi et al. Reference Dalwadi, Griffiths and Bruna2015). The specific problem of circular obstacles that vary slowly in size across the length of a filter was considered in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015, Reference Dalwadi, Bruna and Griffiths2016), constituting a one-parameter variation in microstructure with the periodic cell size constant. We generalise this approach to allow for arbitrary obstacle shape and to include an additional degree of microstructural freedom in the spacing between obstacles. The latter extension allows us to explore porous media with novel properties such as a spatially varying microstructure but a spatially uniform porosity. In order to consider varying cell sizes, we must choose our microscale variable carefully to ensure microscale periodicity, in a similar manner to Chapman & McBurnie (Reference Chapman and McBurnie2011) and Richardson & Chapman (Reference Richardson and Chapman2011).
Following the MMS, we isolate and solve the problem of flow and solute transport in an individual cell, which is uniquely characterised by its aspect ratio
 \begin{equation} a(\hat{x}_1)=A(\tilde{x}_1), \end{equation}
\begin{equation} a(\hat{x}_1)=A(\tilde{x}_1), \end{equation}and scale factor
 \begin{equation} \lambda(\hat{x}_1)= \varLambda(\tilde{x}_1). \end{equation}
\begin{equation} \lambda(\hat{x}_1)= \varLambda(\tilde{x}_1). \end{equation}
We then construct a model for macroscopic flow and transport through the entire porous medium from the solution to these individual cell problems via local averaging. The result is a system of equations that are uniformly valid for all  $\hat {\boldsymbol {x}}\in \hat {\varOmega }$.
$\hat {\boldsymbol {x}}\in \hat {\varOmega }$.
3.1. Two spatial scales
Applying the MMS as in Chapman & McBurnie (Reference Chapman and McBurnie2011) and Richardson & Chapman (Reference Richardson and Chapman2011), we consider the spatial domain on two distinct length scales: the macroscale  $\boldsymbol {x}:= \hat {\boldsymbol {x}}$, relative to which the porous medium is of unit length, and a microscale coordinate
$\boldsymbol {x}:= \hat {\boldsymbol {x}}$, relative to which the porous medium is of unit length, and a microscale coordinate  $\boldsymbol {y}$, in which we impose strict periodicity. The latter can be achieved via a mapping that transforms each cell (comprising the porous material) to a tessellating periodic cell. Here, we choose to transform to a square cell of unit area (see figure 2a). As such, our mapping will stretch the obstacles comprising the macroscale filter by a factor of
$\boldsymbol {y}$, in which we impose strict periodicity. The latter can be achieved via a mapping that transforms each cell (comprising the porous material) to a tessellating periodic cell. Here, we choose to transform to a square cell of unit area (see figure 2a). As such, our mapping will stretch the obstacles comprising the macroscale filter by a factor of  $1/(\epsilon a(x_1))$ in the longitudinal direction and by
$1/(\epsilon a(x_1))$ in the longitudinal direction and by  $1/\epsilon$ in the transverse direction, i.e.
$1/\epsilon$ in the transverse direction, i.e.
 \begin{equation} \frac{\mathrm{d} y_1}{\mathrm{d}\kern0.06em x_1} = \frac{1}{\epsilon a(x_1)} \quad \text{and} \quad \frac{\mathrm{d} y_2}{\mathrm{d}\kern0.06em x_2} = \frac{1}{\epsilon}, \end{equation}
\begin{equation} \frac{\mathrm{d} y_1}{\mathrm{d}\kern0.06em x_1} = \frac{1}{\epsilon a(x_1)} \quad \text{and} \quad \frac{\mathrm{d} y_2}{\mathrm{d}\kern0.06em x_2} = \frac{1}{\epsilon}, \end{equation}thus motivating the definitions
 \begin{equation} {y_1}:= \frac{1}{\epsilon} \int^{x_1} \! \frac{\mathrm{d}s}{a(s)} \quad \text{and} \quad y_2 := \frac{x_2}{\epsilon}. \end{equation}
\begin{equation} {y_1}:= \frac{1}{\epsilon} \int^{x_1} \! \frac{\mathrm{d}s}{a(s)} \quad \text{and} \quad y_2 := \frac{x_2}{\epsilon}. \end{equation}
Figure 2. An arbitrary cell within the porous medium (orange rectangle in figure 1) represented in (a) transformed microscale coordinates and (b) naive microscale coordinates. The transformed microscale coordinates  $y_1$ and
$y_1$ and  $y_2$ and the naive microscale coordinates
$y_2$ and the naive microscale coordinates  $Y_1$ and
$Y_1$ and  $Y_2$ are related via (3.4a,b) and (3.5). The transformed microscale coordinates allow the slow variation in cell width
$Y_2$ are related via (3.4a,b) and (3.5). The transformed microscale coordinates allow the slow variation in cell width  $a$ to be scaled out of the cell problem, such that each naive rectangular cell is transformed into a square.
$a$ to be scaled out of the cell problem, such that each naive rectangular cell is transformed into a square.
Note that any arbitrary distribution of obstacles in the longitudinal directions (i.e. arbitrary longitudinal heterogeneity) can be imposed via the functions  $a(x_1)$ and
$a(x_1)$ and  $\lambda (x_1)$, while in the transverse direction the porous medium is exactly periodic. Additional heterogeneity in the transverse direction can be considered through a more general mapping (Richardson & Chapman Reference Richardson and Chapman2011).
$\lambda (x_1)$, while in the transverse direction the porous medium is exactly periodic. Additional heterogeneity in the transverse direction can be considered through a more general mapping (Richardson & Chapman Reference Richardson and Chapman2011).
To understand the implications of the mapping (3.4a,b) on a single cell, we note that (on the macroscale) the domain of the porous medium,  $\boldsymbol {x}\in \varOmega$, comprises a fluid domain
$\boldsymbol {x}\in \varOmega$, comprises a fluid domain  $\varOmega _f$ and a complementary solid domain
$\varOmega _f$ and a complementary solid domain  $\varOmega _s$. A single cell can be obtained by discretising the porous medium into rectangular cells of height
$\varOmega _s$. A single cell can be obtained by discretising the porous medium into rectangular cells of height  $\epsilon$ and width
$\epsilon$ and width  $\epsilon a(x_1)$. For any single rectangular cell in the domain, the transformation (3.4a,b) yields a transformed microscale,
$\epsilon a(x_1)$. For any single rectangular cell in the domain, the transformation (3.4a,b) yields a transformed microscale,  $\boldsymbol {y}$. On the transformed microscale, each cell
$\boldsymbol {y}$. On the transformed microscale, each cell  $\omega$ comprises a fluid phase
$\omega$ comprises a fluid phase  $\omega _f(x_1)$ and solid obstacles, the union of which is denoted
$\omega _f(x_1)$ and solid obstacles, the union of which is denoted  $\omega _s(x_1):= \omega \setminus \omega _f(x_1)$. The fluid–solid interface
$\omega _s(x_1):= \omega \setminus \omega _f(x_1)$. The fluid–solid interface  $\partial \omega _s(x_1)$ is the union of the boundary of the obstacles. Each cell has four additional boundaries that separate it from neighbouring cells. We denote the top and bottom boundaries
$\partial \omega _s(x_1)$ is the union of the boundary of the obstacles. Each cell has four additional boundaries that separate it from neighbouring cells. We denote the top and bottom boundaries  $\partial \omega _{=}$ and the left and right boundaries
$\partial \omega _{=}$ and the left and right boundaries  $\partial \omega _{\|}$ with the union of these being the unit cell boundary
$\partial \omega _{\|}$ with the union of these being the unit cell boundary  $\partial \omega$.
$\partial \omega$.
Following Chapman & McBurnie (Reference Chapman and McBurnie2011) and Richardson & Chapman (Reference Richardson and Chapman2011), we choose the microscale mapping such that the cell size is the same throughout the domain. Hence, for example, circles will approximately map to ellipses. Since the untransformed cell size varies spatially through the domain, this microscale mapping will lead to obstacles that vary by an  $O(\epsilon )$ amount between neighbouring cells, but by an
$O(\epsilon )$ amount between neighbouring cells, but by an  $O(1)$ amount over the macroscale. We systematically account for these variations using the methodology presented in Bruna & Chapman (Reference Bruna and Chapman2015) and Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015).
$O(1)$ amount over the macroscale. We systematically account for these variations using the methodology presented in Bruna & Chapman (Reference Bruna and Chapman2015) and Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015).
Finally, we note that the transformed microscale variable can be difficult to interpret physically. As such, it will be helpful to define a ‘naive’ microscale coordinate
 \begin{equation} \boldsymbol{Y}:=\boldsymbol{x}/\epsilon, \end{equation}
\begin{equation} \boldsymbol{Y}:=\boldsymbol{x}/\epsilon, \end{equation}
in which each cell is of unit transverse height but of longitudinal width  $a(x_1)$ (figure 2b). After completing the homogenisation procedure in the transformed microscale (3.4a,b), we will transform the relevant cell problems to the naive microscale (3.5), in order to present them more intuitively and subsequently solve them numerically. Note that the domains and boundaries in the (naive) rectangular
$a(x_1)$ (figure 2b). After completing the homogenisation procedure in the transformed microscale (3.4a,b), we will transform the relevant cell problems to the naive microscale (3.5), in order to present them more intuitively and subsequently solve them numerically. Note that the domains and boundaries in the (naive) rectangular  $\boldsymbol {Y}$-cell will be denoted as in the square
$\boldsymbol {Y}$-cell will be denoted as in the square  $\boldsymbol {y}$-cell, but with the addition of a superscript
$\boldsymbol {y}$-cell, but with the addition of a superscript  $\star$. Further, we emphasise that the microscale (cell) problems we derive and solve are not physical flow or transport problems, but rather mathematical constructs that enable us to invoke the MMS.
$\star$. Further, we emphasise that the microscale (cell) problems we derive and solve are not physical flow or transport problems, but rather mathematical constructs that enable us to invoke the MMS.
We now perform the homogenisation. Following the MMS, we take  $\boldsymbol {x}$ and
$\boldsymbol {x}$ and  $\boldsymbol {y}$ to be independent spatial parameters. We therefore re-write all functions of
$\boldsymbol {y}$ to be independent spatial parameters. We therefore re-write all functions of  $\hat {\boldsymbol {x}}$ as functions of
$\hat {\boldsymbol {x}}$ as functions of  $\boldsymbol {x}$ and
$\boldsymbol {x}$ and  $\boldsymbol {y}$:
$\boldsymbol {y}$:  $\hat {\boldsymbol {v}}(\hat {\boldsymbol {x}}):=\boldsymbol {v}(\boldsymbol {x},\boldsymbol {y})$,
$\hat {\boldsymbol {v}}(\hat {\boldsymbol {x}}):=\boldsymbol {v}(\boldsymbol {x},\boldsymbol {y})$,  $\hat {p}(\hat {\boldsymbol {x}}) := p(\boldsymbol {x},\boldsymbol {y})$, and
$\hat {p}(\hat {\boldsymbol {x}}) := p(\boldsymbol {x},\boldsymbol {y})$, and  $\hat {c}(\hat {\boldsymbol {x}},t) := c(\boldsymbol {x},\boldsymbol {y},t)$. We denote functions of
$\hat {c}(\hat {\boldsymbol {x}},t) := c(\boldsymbol {x},\boldsymbol {y},t)$. We denote functions of  $\boldsymbol {Y}$ (rather than of
$\boldsymbol {Y}$ (rather than of  $\boldsymbol {y}$) with a superscript
$\boldsymbol {y}$) with a superscript  $\star$. Spatial derivatives then become
$\star$. Spatial derivatives then become
 \begin{equation} \frac{\partial}{\partial \hat{x}_i} = \frac{\partial}{\partial x_i} + \frac{\sigma_{ij}}{\epsilon} \frac{\partial}{\partial y_j}, \end{equation}
\begin{equation} \frac{\partial}{\partial \hat{x}_i} = \frac{\partial}{\partial x_i} + \frac{\sigma_{ij}}{\epsilon} \frac{\partial}{\partial y_j}, \end{equation}
for  $i,j = 1, 2$, and where
$i,j = 1, 2$, and where  $\sigma _{ij}=(\boldsymbol {\sigma })_{ij}$ and
$\sigma _{ij}=(\boldsymbol {\sigma })_{ij}$ and
 \begin{equation} \boldsymbol{\sigma}=\begin{pmatrix} \displaystyle\frac{1}{a(x_1)} & 0\\ 0 & 1 \end{pmatrix}. \end{equation}
\begin{equation} \boldsymbol{\sigma}=\begin{pmatrix} \displaystyle\frac{1}{a(x_1)} & 0\\ 0 & 1 \end{pmatrix}. \end{equation}Alternatively, in vector form, the spatial derivatives become
 \begin{equation} \hat{\boldsymbol{\nabla}} := \boldsymbol{\nabla}_x+\frac{1}{\epsilon}\boldsymbol{\nabla}_y^a, \end{equation}
\begin{equation} \hat{\boldsymbol{\nabla}} := \boldsymbol{\nabla}_x+\frac{1}{\epsilon}\boldsymbol{\nabla}_y^a, \end{equation}
where  $\boldsymbol {\nabla }_x$ is the gradient operator with respect to the coordinate
$\boldsymbol {\nabla }_x$ is the gradient operator with respect to the coordinate  $\boldsymbol {x}$ and where
$\boldsymbol {x}$ and where
 \begin{equation} \boldsymbol{\nabla}_y^a:= \left(\frac{1}{a}\frac{\partial}{\partial y_1},\frac{\partial}{\partial y_2}\right)^\intercal, \end{equation}
\begin{equation} \boldsymbol{\nabla}_y^a:= \left(\frac{1}{a}\frac{\partial}{\partial y_1},\frac{\partial}{\partial y_2}\right)^\intercal, \end{equation}
is the gradient operator associated with the  $\boldsymbol {y}$-coordinate transform. For a given quantity
$\boldsymbol {y}$-coordinate transform. For a given quantity  $Z(\boldsymbol {x},\boldsymbol {y},t) = Z^\star (\boldsymbol {x},\boldsymbol {Y},t)$, there are two different averages of interest: the intrinsic (fluid) average
$Z(\boldsymbol {x},\boldsymbol {y},t) = Z^\star (\boldsymbol {x},\boldsymbol {Y},t)$, there are two different averages of interest: the intrinsic (fluid) average
 \begin{equation} \langle Z\rangle(\boldsymbol{x},t) := \frac{1}{|\omega_f(x_1)|} \! \int_{\omega_f(x_1)} Z(\boldsymbol{x},\boldsymbol{y},t) \, \mathrm{d}S_y \equiv \frac{1}{|\omega_f^{{\star}} (x_1)|}\! \int_{\omega_f^\star (x_1)} Z^\star(\boldsymbol{x},\boldsymbol{Y},t) \, \mathrm{d}S_Y, \end{equation}
\begin{equation} \langle Z\rangle(\boldsymbol{x},t) := \frac{1}{|\omega_f(x_1)|} \! \int_{\omega_f(x_1)} Z(\boldsymbol{x},\boldsymbol{y},t) \, \mathrm{d}S_y \equiv \frac{1}{|\omega_f^{{\star}} (x_1)|}\! \int_{\omega_f^\star (x_1)} Z^\star(\boldsymbol{x},\boldsymbol{Y},t) \, \mathrm{d}S_Y, \end{equation}
where the total fluid area in the transformed cell  $|\omega _f|$ (or naive cell
$|\omega _f|$ (or naive cell  $|\omega _f^{\star }|$) is a function of
$|\omega _f^{\star }|$) is a function of  $a(x_1)$ and
$a(x_1)$ and  $\lambda (x_1)$, and the volumetric average
$\lambda (x_1)$, and the volumetric average
 \begin{equation} \frac{1}{|\omega(x_1)|}\int_{\omega(x_1)} \! Z(\boldsymbol{x},\boldsymbol{y},t)\, \mathrm{d} S_y \equiv \frac{1}{|\omega^{{\star}}(x_1)|}\int_{\omega^{{\star}}(x_1)} \! Z^\star(\boldsymbol{x},\boldsymbol{Y},t) \, \mathrm{d}S_Y, \end{equation}
\begin{equation} \frac{1}{|\omega(x_1)|}\int_{\omega(x_1)} \! Z(\boldsymbol{x},\boldsymbol{y},t)\, \mathrm{d} S_y \equiv \frac{1}{|\omega^{{\star}}(x_1)|}\int_{\omega^{{\star}}(x_1)} \! Z^\star(\boldsymbol{x},\boldsymbol{Y},t) \, \mathrm{d}S_Y, \end{equation}
where  $|\omega |=1$ and
$|\omega |=1$ and  $|\omega ^{\star }|=a$. Here,
$|\omega ^{\star }|=a$. Here,  $\mathrm {d}S_y:=\mathrm {d} y_1\,\mathrm {d} y_2$ is an area element of the transformed microscale fluid region,
$\mathrm {d}S_y:=\mathrm {d} y_1\,\mathrm {d} y_2$ is an area element of the transformed microscale fluid region,  $\mathrm {d}S_Y:=\mathrm {d}Y_1\,\mathrm {d}Y_2$ is an area element of the naive microscale fluid region and the porosity
$\mathrm {d}S_Y:=\mathrm {d}Y_1\,\mathrm {d}Y_2$ is an area element of the naive microscale fluid region and the porosity  $\phi$ is
$\phi$ is
 \begin{equation} \phi(x_1) = \frac{|\omega_f(x_1)|}{|\omega(x_1)|}\equiv |\omega_f(x_1)| \left(= \frac{|\omega_f^{{\star}}(x_1)|}{|\omega^{{\star}}(x_1)|} \right). \end{equation}
\begin{equation} \phi(x_1) = \frac{|\omega_f(x_1)|}{|\omega(x_1)|}\equiv |\omega_f(x_1)| \left(= \frac{|\omega_f^{{\star}}(x_1)|}{|\omega^{{\star}}(x_1)|} \right). \end{equation}
Thus,  $\langle c\rangle$ is the amount of solute per unit fluid area within the porous medium, while
$\langle c\rangle$ is the amount of solute per unit fluid area within the porous medium, while  $\phi \langle c\rangle$, the volumetric average of the concentration, is the amount of solute per unit total area.
$\phi \langle c\rangle$, the volumetric average of the concentration, is the amount of solute per unit total area.
We define the average velocity, pressure and concentration as
 \begin{align} \boldsymbol{V}(\hat{\boldsymbol{x}}) \equiv \boldsymbol{V}(\boldsymbol{x}) := \langle \boldsymbol{v} \rangle , \quad P(\hat{\boldsymbol{x}}) \equiv P(\boldsymbol{x}) := \langle p \rangle, \quad \text{and} \quad C(\hat{\boldsymbol{x}},t) \equiv C(\boldsymbol{x},t) := \langle c \rangle, \end{align}
\begin{align} \boldsymbol{V}(\hat{\boldsymbol{x}}) \equiv \boldsymbol{V}(\boldsymbol{x}) := \langle \boldsymbol{v} \rangle , \quad P(\hat{\boldsymbol{x}}) \equiv P(\boldsymbol{x}) := \langle p \rangle, \quad \text{and} \quad C(\hat{\boldsymbol{x}},t) \equiv C(\boldsymbol{x},t) := \langle c \rangle, \end{align}
respectively. Note that  $\phi \boldsymbol {V}$ is the standard Darcy flux.
$\phi \boldsymbol {V}$ is the standard Darcy flux.
3.2. Flow problem
For a passive tracer, the flow problem (2.6a) does not depend on  $c$. Using (3.6), (2.6) in an arbitrary cell become
$c$. Using (3.6), (2.6) in an arbitrary cell become
 $$\begin{gather} -\left(\boldsymbol{\nabla}_x+\frac{1}{\epsilon}\boldsymbol{\nabla}_y^a\right){p}+(\epsilon^2\nabla^2_x+\epsilon\boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{\nabla}_y^a +\epsilon\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}\boldsymbol{\nabla}_x +(\nabla_y^a)^2)\boldsymbol{v} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather} -\left(\boldsymbol{\nabla}_x+\frac{1}{\epsilon}\boldsymbol{\nabla}_y^a\right){p}+(\epsilon^2\nabla^2_x+\epsilon\boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{\nabla}_y^a +\epsilon\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}\boldsymbol{\nabla}_x +(\nabla_y^a)^2)\boldsymbol{v} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}(\epsilon\boldsymbol{\nabla}_x+\boldsymbol{\nabla}_y^a)\boldsymbol{\cdot}{{\boldsymbol{v}}} = 0, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather}(\epsilon\boldsymbol{\nabla}_x+\boldsymbol{\nabla}_y^a)\boldsymbol{\cdot}{{\boldsymbol{v}}} = 0, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}\boldsymbol{v} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$
$$\begin{gather}\boldsymbol{v} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$where (3.11b) has been multiplied by epsilon.
To proceed using the MMS, we must also impose periodicity of  $\boldsymbol {v}$,
$\boldsymbol {v}$,  $p$ and
$p$ and  $c$ over a single microscale cell (i.e. local periodicity). Enforcing periodicity of all quantities at both the top and bottom,
$c$ over a single microscale cell (i.e. local periodicity). Enforcing periodicity of all quantities at both the top and bottom,  $\partial \omega _{=}$, and left and right,
$\partial \omega _{=}$, and left and right,  $\partial \omega _{\|}$, cell boundaries leads to
$\partial \omega _{\|}$, cell boundaries leads to
 \begin{equation} \boldsymbol{v} \quad \text{and}\quad p \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}. \end{equation}
\begin{equation} \boldsymbol{v} \quad \text{and}\quad p \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}. \end{equation} We now seek an asymptotic solution to (3.11) by expanding  $\boldsymbol {v}$ and
$\boldsymbol {v}$ and  $p$ in powers of
$p$ in powers of  $\epsilon$
$\epsilon$
 $$\begin{gather} \boldsymbol{v}(\boldsymbol{x},\boldsymbol{y}) = \boldsymbol{v}^{(0)}(\boldsymbol{x},\boldsymbol{y})+\epsilon\boldsymbol{v}^{(1)}(\boldsymbol{x},\boldsymbol{y})+\cdots \quad \text{as}\ \epsilon\to0, \end{gather}$$
$$\begin{gather} \boldsymbol{v}(\boldsymbol{x},\boldsymbol{y}) = \boldsymbol{v}^{(0)}(\boldsymbol{x},\boldsymbol{y})+\epsilon\boldsymbol{v}^{(1)}(\boldsymbol{x},\boldsymbol{y})+\cdots \quad \text{as}\ \epsilon\to0, \end{gather}$$ $$\begin{gather}p(\boldsymbol{x},\boldsymbol{y} ) = p^{(0)}(\boldsymbol{x},\boldsymbol{y})+\epsilon p^{(1)}(\boldsymbol{x},\boldsymbol{y})+\cdots \quad \text{as}\ \epsilon\to0. \end{gather}$$
$$\begin{gather}p(\boldsymbol{x},\boldsymbol{y} ) = p^{(0)}(\boldsymbol{x},\boldsymbol{y})+\epsilon p^{(1)}(\boldsymbol{x},\boldsymbol{y})+\cdots \quad \text{as}\ \epsilon\to0. \end{gather}$$
Considering terms of  $O(1/\epsilon )$ in (3.11a) gives
$O(1/\epsilon )$ in (3.11a) gives
 \begin{equation} \boldsymbol{\nabla}_y^ap^{(0)}= \boldsymbol{0}, \end{equation}
\begin{equation} \boldsymbol{\nabla}_y^ap^{(0)}= \boldsymbol{0}, \end{equation}
from which we conclude the standard result that, at leading order, the pressure is uniform on the microscale:  $p^{(0)} = p^{(0)}(\boldsymbol {x})$.
$p^{(0)} = p^{(0)}(\boldsymbol {x})$.
Considering terms of  $O(1)$ in (3.11) gives
$O(1)$ in (3.11) gives
 $$\begin{gather} -\boldsymbol{\nabla}_x p^{(0)}-\boldsymbol{\nabla}_y^a{p^{(1)}}+(\nabla_y^a)^2\boldsymbol{v}^{(0)} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather} -\boldsymbol{\nabla}_x p^{(0)}-\boldsymbol{\nabla}_y^a{p^{(1)}}+(\nabla_y^a)^2\boldsymbol{v}^{(0)} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{{\boldsymbol{v}^{(0)}}} = 0, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{{\boldsymbol{v}^{(0)}}} = 0, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}{\boldsymbol{v}^{(0)}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$
$$\begin{gather}{\boldsymbol{v}^{(0)}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$with
 \begin{equation} \boldsymbol{v}^{(0)}\quad \text{and}\quad p^{(1)} \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}. \end{equation}
\begin{equation} \boldsymbol{v}^{(0)}\quad \text{and}\quad p^{(1)} \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}. \end{equation}
The form of (3.14) suggests that we can scale  $\boldsymbol {\nabla }_x p^{(0)}$ out of the problem via the substitutions
$\boldsymbol {\nabla }_x p^{(0)}$ out of the problem via the substitutions
 $$\begin{gather} \boldsymbol{v}^{(0)} ={-}\boldsymbol{{\mathcal{K}}}(\boldsymbol{x}, \boldsymbol{y}) \boldsymbol{\cdot} \boldsymbol{\nabla}_x p^{(0)}, \end{gather}$$
$$\begin{gather} \boldsymbol{v}^{(0)} ={-}\boldsymbol{{\mathcal{K}}}(\boldsymbol{x}, \boldsymbol{y}) \boldsymbol{\cdot} \boldsymbol{\nabla}_x p^{(0)}, \end{gather}$$ $$\begin{gather}p^{(1)} ={-}\boldsymbol{\varPi}(\boldsymbol{x},\boldsymbol{y})\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} +\breve{p}(\boldsymbol{x}), \end{gather}$$
$$\begin{gather}p^{(1)} ={-}\boldsymbol{\varPi}(\boldsymbol{x},\boldsymbol{y})\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} +\breve{p}(\boldsymbol{x}), \end{gather}$$
where  $\breve {p}(\boldsymbol {x})$ is a scalar function,
$\breve {p}(\boldsymbol {x})$ is a scalar function,  $\boldsymbol {{\mathcal {K}}}(\boldsymbol {x}, \boldsymbol {y})$ is a tensor function, and
$\boldsymbol {{\mathcal {K}}}(\boldsymbol {x}, \boldsymbol {y})$ is a tensor function, and  $\boldsymbol {\varPi }(\boldsymbol {x},\boldsymbol {y})$ is a vector function. Using (3.15a,b) and the fact that
$\boldsymbol {\varPi }(\boldsymbol {x},\boldsymbol {y})$ is a vector function. Using (3.15a,b) and the fact that  $p^{(0)}$ is independent of
$p^{(0)}$ is independent of  $\boldsymbol {y}$, (3.14a–c) becomes
$\boldsymbol {y}$, (3.14a–c) becomes
 $$\begin{gather} (\boldsymbol{\mathsf{I}}-\boldsymbol{\nabla}_y^a\otimes\boldsymbol{\varPi}+(\nabla^a_y)^2\boldsymbol{{\mathcal{K}}})\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather} (\boldsymbol{\mathsf{I}}-\boldsymbol{\nabla}_y^a\otimes\boldsymbol{\varPi}+(\nabla^a_y)^2\boldsymbol{{\mathcal{K}}})\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}(\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}})\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} = 0, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather}(\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}})\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} = 0, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}\boldsymbol{{\mathcal{K}}}\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$
$$\begin{gather}\boldsymbol{{\mathcal{K}}}\boldsymbol{\cdot}\boldsymbol{\nabla}_x p^{(0)} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$with
 \begin{equation} \mathcal{K}_{ij}:=\left(\boldsymbol{\mathcal{K}}\right)_{ij} \quad \text{and} \quad \varPi_{i}:=\left(\boldsymbol{\varPi}\right)_{i} \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=} \quad \text{and}\quad \partial\omega_{\|}, \end{equation}
\begin{equation} \mathcal{K}_{ij}:=\left(\boldsymbol{\mathcal{K}}\right)_{ij} \quad \text{and} \quad \varPi_{i}:=\left(\boldsymbol{\varPi}\right)_{i} \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=} \quad \text{and}\quad \partial\omega_{\|}, \end{equation}
where  $\boldsymbol{\mathsf{I}}$ is the identity tensor and where
$\boldsymbol{\mathsf{I}}$ is the identity tensor and where
 \begin{equation} \left(\boldsymbol{\nabla}_y^a\otimes\boldsymbol{\varPi}\right)_{ij} = \sigma_{ik} \frac{\partial \varPi_j}{\partial y_k} \quad \text{and} \quad(\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}})_{i} = \sigma_{jk} \frac{\partial {\mathcal{K}}_{ji}}{\partial y_k}. \end{equation}
\begin{equation} \left(\boldsymbol{\nabla}_y^a\otimes\boldsymbol{\varPi}\right)_{ij} = \sigma_{ik} \frac{\partial \varPi_j}{\partial y_k} \quad \text{and} \quad(\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}})_{i} = \sigma_{jk} \frac{\partial {\mathcal{K}}_{ji}}{\partial y_k}. \end{equation}
Note that, in the above, we have adopted the summation convention; we will adopt the summation convention throughout this manuscript. Equations (3.16) must hold for arbitrary  $\boldsymbol {\nabla }_x p^{(0)}$, hence
$\boldsymbol {\nabla }_x p^{(0)}$, hence  $\boldsymbol {{\mathcal {K}}}(\boldsymbol {x}, \boldsymbol {y})$ and
$\boldsymbol {{\mathcal {K}}}(\boldsymbol {x}, \boldsymbol {y})$ and  $\boldsymbol {\varPi }(\boldsymbol {x},\boldsymbol {y})$ must satisfy the system
$\boldsymbol {\varPi }(\boldsymbol {x},\boldsymbol {y})$ must satisfy the system
 $$\begin{gather} \boldsymbol{\mathsf{I}}-\boldsymbol{\nabla}_y^a\otimes\boldsymbol{\varPi}+(\nabla^a_y)^2\boldsymbol{{\mathcal{K}}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather} \boldsymbol{\mathsf{I}}-\boldsymbol{\nabla}_y^a\otimes\boldsymbol{\varPi}+(\nabla^a_y)^2\boldsymbol{{\mathcal{K}}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in\omega_f(x_1), \end{gather}$$ $$\begin{gather}\boldsymbol{{\mathcal{K}}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$
$$\begin{gather}\boldsymbol{{\mathcal{K}}} = \boldsymbol{0}, \quad {\boldsymbol{y}}\in \partial\omega_s(x_1), \end{gather}$$with
 \begin{equation} {\mathcal{K}}_{ij} \quad \text{and} \quad \varPi_{i} \quad \text{periodic on} \ \boldsymbol{y}\in\partial\omega_{=} \quad \text{and}\quad \partial\omega_{\|}. \end{equation}
\begin{equation} {\mathcal{K}}_{ij} \quad \text{and} \quad \varPi_{i} \quad \text{periodic on} \ \boldsymbol{y}\in\partial\omega_{=} \quad \text{and}\quad \partial\omega_{\|}. \end{equation} In general, (3.17) must be solved numerically for each desired cell geometry (i.e. pairs of  $a$ and
$a$ and  $\lambda$). Note that (3.17) are independent of
$\lambda$). Note that (3.17) are independent of  $\boldsymbol {\nabla }_xp^{(0)}$, justifying our scalings in (3.15).
$\boldsymbol {\nabla }_xp^{(0)}$, justifying our scalings in (3.15).
To derive a macroscale relationship between velocity and pressure from (3.15a), we expand the averaged quantities defined in (3.10a–c) in powers of  $\epsilon$
$\epsilon$
 $$\begin{gather} \boldsymbol{V}(\hat{\boldsymbol{x}}) = \boldsymbol{V}^{(0)}(\hat{\boldsymbol{x}})+\epsilon\boldsymbol{V}^{(1)}(\hat{\boldsymbol{x}})+\cdots\quad \text{as}\ \epsilon\to0, \end{gather}$$
$$\begin{gather} \boldsymbol{V}(\hat{\boldsymbol{x}}) = \boldsymbol{V}^{(0)}(\hat{\boldsymbol{x}})+\epsilon\boldsymbol{V}^{(1)}(\hat{\boldsymbol{x}})+\cdots\quad \text{as}\ \epsilon\to0, \end{gather}$$ $$\begin{gather}P(\hat{\boldsymbol{x}}) = P^{(0)}(\hat{\boldsymbol{x}})+\epsilon P^{(1)}(\hat{\boldsymbol{x}})+\cdots\quad\ \text{as}\ \epsilon\to0. \end{gather}$$
$$\begin{gather}P(\hat{\boldsymbol{x}}) = P^{(0)}(\hat{\boldsymbol{x}})+\epsilon P^{(1)}(\hat{\boldsymbol{x}})+\cdots\quad\ \text{as}\ \epsilon\to0. \end{gather}$$Note that
 \begin{equation} P^{(0)}(\hat{\boldsymbol{x}}) = \langle p^{(0)}(\boldsymbol{x})\rangle \equiv p^{(0)}(\boldsymbol{x}), \end{equation}
\begin{equation} P^{(0)}(\hat{\boldsymbol{x}}) = \langle p^{(0)}(\boldsymbol{x})\rangle \equiv p^{(0)}(\boldsymbol{x}), \end{equation}
since  $p^{(0)}$ is independent of
$p^{(0)}$ is independent of  $\boldsymbol {y}$. We then take the intrinsic average of (3.15a) to determine that the leading-order macroscale velocity depends on gradients in the leading-order macroscale pressure according to Darcy's law
$\boldsymbol {y}$. We then take the intrinsic average of (3.15a) to determine that the leading-order macroscale velocity depends on gradients in the leading-order macroscale pressure according to Darcy's law
 \begin{equation} \phi\boldsymbol{V}^{(0)} ={-}\boldsymbol{\mathsf{K}}(\phi, a)\boldsymbol{\cdot}\hat{\boldsymbol{\nabla}}P^{(0)}, \end{equation}
\begin{equation} \phi\boldsymbol{V}^{(0)} ={-}\boldsymbol{\mathsf{K}}(\phi, a)\boldsymbol{\cdot}\hat{\boldsymbol{\nabla}}P^{(0)}, \end{equation}where we have introduced the macroscale permeability tensor
 \begin{equation} \boldsymbol{\mathsf{K}}(\phi, a) := \phi\langle{\boldsymbol{\mathcal{K}}}\rangle, \end{equation}
\begin{equation} \boldsymbol{\mathsf{K}}(\phi, a) := \phi\langle{\boldsymbol{\mathcal{K}}}\rangle, \end{equation}
and where  $\phi$ and
$\phi$ and  $a$ are known functions of
$a$ are known functions of  $\hat {{x}}_1$. Prescribing both
$\hat {{x}}_1$. Prescribing both  $\phi$ and
$\phi$ and  $a$ determines
$a$ determines  $\lambda$ via a simple geometric relation, specific to the chosen geometry of the porous material.
$\lambda$ via a simple geometric relation, specific to the chosen geometry of the porous material.
Being averaged in  $\boldsymbol {y}$, (3.20a) depends on
$\boldsymbol {y}$, (3.20a) depends on  $\hat {\boldsymbol {x}} = \boldsymbol {x}$ only and we have therefore replaced
$\hat {\boldsymbol {x}} = \boldsymbol {x}$ only and we have therefore replaced  $\boldsymbol {\nabla }_x$ with
$\boldsymbol {\nabla }_x$ with  $\hat {\boldsymbol {\nabla }}$. If the cell geometry has symmetric reflectional symmetry along both the
$\hat {\boldsymbol {\nabla }}$. If the cell geometry has symmetric reflectional symmetry along both the  $y_1$ and
$y_1$ and  $y_2$ axes, the symmetry of the boundary conditions implies that
$y_2$ axes, the symmetry of the boundary conditions implies that  $\boldsymbol{\mathsf{K}}$ is diagonal. If it is additionally the case that
$\boldsymbol{\mathsf{K}}$ is diagonal. If it is additionally the case that  $a=1$, then
$a=1$, then  $\boldsymbol{\mathsf{K}}$ reduces to a scalar multiple of
$\boldsymbol{\mathsf{K}}$ reduces to a scalar multiple of  $\boldsymbol{\mathsf{I}}$.
$\boldsymbol{\mathsf{I}}$.
Equation (3.20a) provides two equations for three unknowns. To develop another constraint in terms of  $\boldsymbol {V}^{(0)}$ and
$\boldsymbol {V}^{(0)}$ and  $P^{(0)}$, consider the
$P^{(0)}$, consider the  $O(\epsilon )$ terms from (3.11b) and (3.11c)
$O(\epsilon )$ terms from (3.11b) and (3.11c)
 $$\begin{gather} \boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{v}^{(0)}={-}\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}\boldsymbol{v}^{(1)},\quad \boldsymbol{y}\in\omega_f \end{gather}$$
$$\begin{gather} \boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{v}^{(0)}={-}\boldsymbol{\nabla}_y^a\boldsymbol{\cdot}\boldsymbol{v}^{(1)},\quad \boldsymbol{y}\in\omega_f \end{gather}$$ $$\begin{gather}\boldsymbol{v}^{(1)} = \boldsymbol{0}, \quad \boldsymbol{y}\in\partial\omega_s. \end{gather}$$
$$\begin{gather}\boldsymbol{v}^{(1)} = \boldsymbol{0}, \quad \boldsymbol{y}\in\partial\omega_s. \end{gather}$$We take the intrinsic average of (3.21a) and apply the divergence theorem to the right-hand side which vanishes by (3.21b). Then, applying the transport theorem (A12), derived in Appendix A, to the left-hand side of the intrinsic average of (3.21a) yields
 \begin{equation} \boldsymbol{\nabla}_x\boldsymbol{\cdot}\int_{\omega_f}\boldsymbol{v}^{(0)}\,\mathrm{d}S_y = 0, \end{equation}
\begin{equation} \boldsymbol{\nabla}_x\boldsymbol{\cdot}\int_{\omega_f}\boldsymbol{v}^{(0)}\,\mathrm{d}S_y = 0, \end{equation}
where we have used (3.14c). Expressing (3.22) in terms of the averaged quantity  $\boldsymbol {V}^{(0)}$ gives
$\boldsymbol {V}^{(0)}$ gives
 \begin{equation} \hat{\boldsymbol{\nabla}}\boldsymbol{\cdot}(\phi\boldsymbol{V}^{(0)}) = 0, \end{equation}
\begin{equation} \hat{\boldsymbol{\nabla}}\boldsymbol{\cdot}(\phi\boldsymbol{V}^{(0)}) = 0, \end{equation}
which closes the system defined in (3.20a). Similarly to (3.20a), there is no  $\boldsymbol {y}$-dependence in (3.23), so we have replaced
$\boldsymbol {y}$-dependence in (3.23), so we have replaced  $\boldsymbol {\nabla }_x$ with
$\boldsymbol {\nabla }_x$ with  $\hat {\boldsymbol {\nabla }}$.
$\hat {\boldsymbol {\nabla }}$.
To evaluate  $\boldsymbol{\mathsf{K}}$, we find it convenient to map the system (3.17) to the naive microscale coordinate
$\boldsymbol{\mathsf{K}}$, we find it convenient to map the system (3.17) to the naive microscale coordinate  $\boldsymbol {Y}$, defined in (3.5). In the naive microscale coordinate, different values of
$\boldsymbol {Y}$, defined in (3.5). In the naive microscale coordinate, different values of  $a$ manifest as physical changes to the domain rather than as changes to the governing equations, yielding more intuitive cell problems. This mapping gives
$a$ manifest as physical changes to the domain rather than as changes to the governing equations, yielding more intuitive cell problems. This mapping gives
 $$\begin{gather} \boldsymbol{\mathsf{I}}-\boldsymbol{\nabla}_Y\otimes\boldsymbol{\varPi}^\star{+}\nabla_Y^2\boldsymbol{{\mathcal{K}}}^\star{=} \boldsymbol{0}, \quad {\boldsymbol{Y}}\in\omega_f^{{\star}}(x_1), \end{gather}$$
$$\begin{gather} \boldsymbol{\mathsf{I}}-\boldsymbol{\nabla}_Y\otimes\boldsymbol{\varPi}^\star{+}\nabla_Y^2\boldsymbol{{\mathcal{K}}}^\star{=} \boldsymbol{0}, \quad {\boldsymbol{Y}}\in\omega_f^{{\star}}(x_1), \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}_Y\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}}^\star{=} \boldsymbol{0}, \quad {\boldsymbol{Y}}\in\omega_f^{{\star}}(x_1), \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}_Y\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}}^\star{=} \boldsymbol{0}, \quad {\boldsymbol{Y}}\in\omega_f^{{\star}}(x_1), \end{gather}$$ $$\begin{gather}\boldsymbol{{\mathcal{K}}}^\star{=} \boldsymbol{0}, \quad {\boldsymbol{Y}}\in \partial\omega_s^{{\star}}(x_1), \end{gather}$$
$$\begin{gather}\boldsymbol{{\mathcal{K}}}^\star{=} \boldsymbol{0}, \quad {\boldsymbol{Y}}\in \partial\omega_s^{{\star}}(x_1), \end{gather}$$with
 \begin{equation} \mathcal{K}^\star_{ij}:=\left(\boldsymbol{\mathcal{K}}^\star\right)_{ij} \quad \text{and} \quad \varPi_{i}^\star:=\left(\boldsymbol{\varPi}^\star\right)_{i} \quad \text{periodic on} \quad \boldsymbol{Y}\in\partial\omega_{=}^{{\star}} \quad \text{and}\quad \partial\omega_{\|}^{{\star}}, \end{equation}
\begin{equation} \mathcal{K}^\star_{ij}:=\left(\boldsymbol{\mathcal{K}}^\star\right)_{ij} \quad \text{and} \quad \varPi_{i}^\star:=\left(\boldsymbol{\varPi}^\star\right)_{i} \quad \text{periodic on} \quad \boldsymbol{Y}\in\partial\omega_{=}^{{\star}} \quad \text{and}\quad \partial\omega_{\|}^{{\star}}, \end{equation}
where  $\boldsymbol {\nabla }_Y$ is the gradient operator with respect to the coordinate
$\boldsymbol {\nabla }_Y$ is the gradient operator with respect to the coordinate  $\boldsymbol {Y}$. Note that
$\boldsymbol {Y}$. Note that
 \begin{equation} \left(\boldsymbol{\nabla}_Y\otimes\boldsymbol{\varPi}^\star\right)_{ij} = \frac{\partial \varPi_j^\star}{\partial Y_i} \quad \text{and} \quad(\boldsymbol{\nabla}_Y\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}}^\star)_{i} = \frac{\partial {\mathcal{K}}^\star_{ji}}{\partial Y_j}. \end{equation}
\begin{equation} \left(\boldsymbol{\nabla}_Y\otimes\boldsymbol{\varPi}^\star\right)_{ij} = \frac{\partial \varPi_j^\star}{\partial Y_i} \quad \text{and} \quad(\boldsymbol{\nabla}_Y\boldsymbol{\cdot}{\boldsymbol{{\mathcal{K}}}}^\star)_{i} = \frac{\partial {\mathcal{K}}^\star_{ji}}{\partial Y_j}. \end{equation}
In § 4 we consider a porous medium with a simple, prescribed microstructure. In that section, we solve (3.24) using COMSOL Multiphysics, graphically present  $\boldsymbol{\mathsf{K}}(\phi, a)$ and discuss its implications.
$\boldsymbol{\mathsf{K}}(\phi, a)$ and discuss its implications.
3.3. Transport problem
We now perform a similar homogenisation procedure for the solute-transport problem (2.7). The main difference between the classic homogenisation procedure and our procedure here is that we use the transformed microscale  $\boldsymbol {y}$ to convert a locally periodic tessellating cell structure into a strictly periodic tessellating cell structure. As such, we proceed following the framework of Chapman & McBurnie (Reference Chapman and McBurnie2011) and Richardson & Chapman (Reference Richardson and Chapman2011). A key step is to consider the unit normal
$\boldsymbol {y}$ to convert a locally periodic tessellating cell structure into a strictly periodic tessellating cell structure. As such, we proceed following the framework of Chapman & McBurnie (Reference Chapman and McBurnie2011) and Richardson & Chapman (Reference Richardson and Chapman2011). A key step is to consider the unit normal  $\hat {\boldsymbol {n}}_s$ that appears in (2.7b). In general, under the microscale transformation (3.4a,b),
$\hat {\boldsymbol {n}}_s$ that appears in (2.7b). In general, under the microscale transformation (3.4a,b),  $\hat {\boldsymbol {n}}_s$ will not be transformed to the geometric normal of the transformed cell. Hence, we must take care when transforming the normal into multiple-scales form.
$\hat {\boldsymbol {n}}_s$ will not be transformed to the geometric normal of the transformed cell. Hence, we must take care when transforming the normal into multiple-scales form.
Under the multiple-scales framework, the unit normal to the solid interface is written as a function of both the macro- and microscales  $\hat {\boldsymbol {n}}_s(\hat {\boldsymbol {x}}) = \boldsymbol {n}_s(\boldsymbol {x},\boldsymbol {y})$, and similarly for the function
$\hat {\boldsymbol {n}}_s(\hat {\boldsymbol {x}}) = \boldsymbol {n}_s(\boldsymbol {x},\boldsymbol {y})$, and similarly for the function  $\hat {f}_s(\hat {\boldsymbol {x}}) = f_s(\boldsymbol {x},\boldsymbol {y})$, which vanishes on the solid interface. The consistent transformation of
$\hat {f}_s(\hat {\boldsymbol {x}}) = f_s(\boldsymbol {x},\boldsymbol {y})$, which vanishes on the solid interface. The consistent transformation of  $\boldsymbol {n}_s \equiv n_s^{i} \boldsymbol {e}_i$ requires the consistent application of the MMS derivative transformation (3.6) to the definition of
$\boldsymbol {n}_s \equiv n_s^{i} \boldsymbol {e}_i$ requires the consistent application of the MMS derivative transformation (3.6) to the definition of  $\boldsymbol {n}_s$ in terms of
$\boldsymbol {n}_s$ in terms of  $f_s$ given by (2.8), to obtain the transformed unit normal
$f_s$ given by (2.8), to obtain the transformed unit normal
 \begin{equation} \boldsymbol{n}_s = \frac{\left(\boldsymbol{\nabla}_y^a + \epsilon \boldsymbol{\nabla}_x\right)f_s}{\left|\left(\boldsymbol{\nabla}_y^a + \epsilon \boldsymbol{\nabla}_x \right)f_s\right|} = \frac{\displaystyle \left(\sigma_{ij} \frac{\partial f_s}{\partial y_j} + \epsilon \frac{\partial f_s}{\partial x_i}\right) \boldsymbol{e}_i }{\left[\displaystyle \sigma_{kl}\sigma_{km} \frac{\partial f_s}{\partial y_l}\frac{\partial f_s}{\partial y_m} \right]^{1/2} + O(\epsilon)}. \end{equation}
\begin{equation} \boldsymbol{n}_s = \frac{\left(\boldsymbol{\nabla}_y^a + \epsilon \boldsymbol{\nabla}_x\right)f_s}{\left|\left(\boldsymbol{\nabla}_y^a + \epsilon \boldsymbol{\nabla}_x \right)f_s\right|} = \frac{\displaystyle \left(\sigma_{ij} \frac{\partial f_s}{\partial y_j} + \epsilon \frac{\partial f_s}{\partial x_i}\right) \boldsymbol{e}_i }{\left[\displaystyle \sigma_{kl}\sigma_{km} \frac{\partial f_s}{\partial y_l}\frac{\partial f_s}{\partial y_m} \right]^{1/2} + O(\epsilon)}. \end{equation}
It will also be helpful to define the leading-order transformed unit normal  $\boldsymbol {n}^{Y} = n^Y_i \boldsymbol {e}_i$ as follows:
$\boldsymbol {n}^{Y} = n^Y_i \boldsymbol {e}_i$ as follows:
 \begin{equation} \boldsymbol{n}^{Y} = \frac{\displaystyle \sigma_{ij} \frac{\partial f_s}{\partial y_j} \boldsymbol{e}_i}{\left[\displaystyle \sigma_{kl}\sigma_{km} \frac{\partial f_s}{\partial y_l}\frac{\partial f_s}{\partial y_m} \right]^{1/2}}, \end{equation}
\begin{equation} \boldsymbol{n}^{Y} = \frac{\displaystyle \sigma_{ij} \frac{\partial f_s}{\partial y_j} \boldsymbol{e}_i}{\left[\displaystyle \sigma_{kl}\sigma_{km} \frac{\partial f_s}{\partial y_l}\frac{\partial f_s}{\partial y_m} \right]^{1/2}}, \end{equation}
such that  $\boldsymbol {n}_s \sim \boldsymbol {n}^{Y}$ as
$\boldsymbol {n}_s \sim \boldsymbol {n}^{Y}$ as  $\epsilon \to 0$. However, we also note that the geometric unit normal
$\epsilon \to 0$. However, we also note that the geometric unit normal  $\boldsymbol {n}^y = n^y_i \boldsymbol {e}_i$ is defined as
$\boldsymbol {n}^y = n^y_i \boldsymbol {e}_i$ is defined as
 \begin{equation} \boldsymbol{n}^y := \frac{\boldsymbol{\nabla}_y\, f_s}{\left|\boldsymbol{\nabla}_y\, f_s \right|} = \frac{\displaystyle \frac{\partial f_s}{\partial y_i} \boldsymbol{e}_i}{\left[\displaystyle \frac{\partial f_s}{\partial y_j} \frac{\partial f_s}{\partial y_j} \right]^{1/2}}, \end{equation}
\begin{equation} \boldsymbol{n}^y := \frac{\boldsymbol{\nabla}_y\, f_s}{\left|\boldsymbol{\nabla}_y\, f_s \right|} = \frac{\displaystyle \frac{\partial f_s}{\partial y_i} \boldsymbol{e}_i}{\left[\displaystyle \frac{\partial f_s}{\partial y_j} \frac{\partial f_s}{\partial y_j} \right]^{1/2}}, \end{equation}
where  $\boldsymbol {\nabla }_y$ is the gradient operator with respect to the coordinate
$\boldsymbol {\nabla }_y$ is the gradient operator with respect to the coordinate  $\boldsymbol {y}$. Importantly, the transformed normal (3.25a) and geometric normal (3.25c) are not equal. Moreover, comparing (3.25b) and (3.25c) reveals that they are not even equal to leading order in
$\boldsymbol {y}$. Importantly, the transformed normal (3.25a) and geometric normal (3.25c) are not equal. Moreover, comparing (3.25b) and (3.25c) reveals that they are not even equal to leading order in  $\epsilon$ unless
$\epsilon$ unless  $a \equiv 1$.
$a \equiv 1$.
To facilitate our subsequent manipulation of the transformed problem, we write the transformed normal  $\boldsymbol {n}_s$ in terms of the geometric normal
$\boldsymbol {n}_s$ in terms of the geometric normal  $\boldsymbol {n}^y$. Since (3.25c) can be rearranged to obtain
$\boldsymbol {n}^y$. Since (3.25c) can be rearranged to obtain  $\partial f_s /\partial y_i = |\boldsymbol {\nabla }_y\, f_s | n^y_i$, we can re-write the transformed normal (3.25a) as
$\partial f_s /\partial y_i = |\boldsymbol {\nabla }_y\, f_s | n^y_i$, we can re-write the transformed normal (3.25a) as
 \begin{equation} \boldsymbol{n}_s = \frac{\displaystyle \left(\sigma_{ij} n^y_j + \epsilon N_i\right) \boldsymbol{e}_i}{\left[\displaystyle \sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} + O(\epsilon)}, \end{equation}
\begin{equation} \boldsymbol{n}_s = \frac{\displaystyle \left(\sigma_{ij} n^y_j + \epsilon N_i\right) \boldsymbol{e}_i}{\left[\displaystyle \sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} + O(\epsilon)}, \end{equation}
where the macroscale perturbation to the normal  $\boldsymbol {N} = N_i \boldsymbol {e}_i$ is defined as
$\boldsymbol {N} = N_i \boldsymbol {e}_i$ is defined as
 \begin{equation} \boldsymbol{N}:=\frac{\boldsymbol{\nabla}_x\,f_s}{|\boldsymbol{\nabla}_y\, f_s|}. \end{equation}
\begin{equation} \boldsymbol{N}:=\frac{\boldsymbol{\nabla}_x\,f_s}{|\boldsymbol{\nabla}_y\, f_s|}. \end{equation}
The macroscale perturbation to the normal  $\boldsymbol {N}$ formally quantifies the effect of the transformed microscale structure varying over the macroscale within the MMS framework.
$\boldsymbol {N}$ formally quantifies the effect of the transformed microscale structure varying over the macroscale within the MMS framework.
Having defined the transformed normal in terms of the geometric normal, we are now in a position to proceed with the homogenisation. Under the spatial transformations (3.6), (2.7) become
 \begin{align} &\epsilon\frac{\partial {{c}}}{\partial {t}} = \left(\epsilon \frac{\partial}{\partial x_i}+\sigma_{ij} \frac{\partial}{\partial y_j}\right) \left[\frac{\partial c}{\partial x_i}+\dfrac{\sigma_{ik}}{\epsilon}\frac{\partial c}{\partial y_k}- Pe \ {v_i}{c}\right], \quad {{\boldsymbol{y}}}\in\omega_f(x_1), \end{align}
\begin{align} &\epsilon\frac{\partial {{c}}}{\partial {t}} = \left(\epsilon \frac{\partial}{\partial x_i}+\sigma_{ij} \frac{\partial}{\partial y_j}\right) \left[\frac{\partial c}{\partial x_i}+\dfrac{\sigma_{ik}}{\epsilon}\frac{\partial c}{\partial y_k}- Pe \ {v_i}{c}\right], \quad {{\boldsymbol{y}}}\in\omega_f(x_1), \end{align} \begin{align} &-\epsilon\gamma{c} \left[\displaystyle \sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} +O(\epsilon^2)\notag\\ &\quad = (\sigma_{ij} n^y_j + \epsilon N_i) \left[\frac{\partial c}{\partial x_i}+\dfrac{\sigma_{ik}}{\epsilon}\frac{\partial c}{\partial y_k}- Pe \ {v_i}{c}\right], \quad {{\boldsymbol{y}}}\in \partial\omega_s(x_1), \end{align}
\begin{align} &-\epsilon\gamma{c} \left[\displaystyle \sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} +O(\epsilon^2)\notag\\ &\quad = (\sigma_{ij} n^y_j + \epsilon N_i) \left[\frac{\partial c}{\partial x_i}+\dfrac{\sigma_{ik}}{\epsilon}\frac{\partial c}{\partial y_k}- Pe \ {v_i}{c}\right], \quad {{\boldsymbol{y}}}\in \partial\omega_s(x_1), \end{align}with
 \begin{equation} v_i, \quad c, \quad \text{periodic on} \ \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}, \end{equation}
\begin{equation} v_i, \quad c, \quad \text{periodic on} \ \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}, \end{equation}
where  $\boldsymbol {v} = v_i \boldsymbol {e}_i$. Note that, for clarity of presentation in what follows, we have multiplied by
$\boldsymbol {v} = v_i \boldsymbol {e}_i$. Note that, for clarity of presentation in what follows, we have multiplied by  $\epsilon$ when deriving (3.26a) from (2.7a). We now consider an expansion of the concentration field of the form
$\epsilon$ when deriving (3.26a) from (2.7a). We now consider an expansion of the concentration field of the form
 \begin{equation} c(\boldsymbol{x}, \boldsymbol{y},t) = c^{(0)}(\boldsymbol{x}, \boldsymbol{y},t) + \epsilon c^{(1)}(\boldsymbol{x}, \boldsymbol{y},t) + \epsilon^2 c^{(2)}(\boldsymbol{x}, \boldsymbol{y},t) +\cdots \quad \text{as} \ \epsilon \to 0. \end{equation}
\begin{equation} c(\boldsymbol{x}, \boldsymbol{y},t) = c^{(0)}(\boldsymbol{x}, \boldsymbol{y},t) + \epsilon c^{(1)}(\boldsymbol{x}, \boldsymbol{y},t) + \epsilon^2 c^{(2)}(\boldsymbol{x}, \boldsymbol{y},t) +\cdots \quad \text{as} \ \epsilon \to 0. \end{equation}
Note that we take  $Pe, \gamma = O(1)$ to be constants independent of
$Pe, \gamma = O(1)$ to be constants independent of  $\epsilon$, corresponding to a distinguished limit where all transport mechanisms balance over the macroscale (cf. (3.45c)). Considering (3.26) at leading order – that is,
$\epsilon$, corresponding to a distinguished limit where all transport mechanisms balance over the macroscale (cf. (3.45c)). Considering (3.26) at leading order – that is,  $O(1/\epsilon )$ – we obtain
$O(1/\epsilon )$ – we obtain
 $$\begin{gather} \sigma_{ij} \sigma_{ik} \dfrac{\partial^2 c^{(0)}}{\partial y_j\partial y_k} = 0, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$
$$\begin{gather} \sigma_{ij} \sigma_{ik} \dfrac{\partial^2 c^{(0)}}{\partial y_j\partial y_k} = 0, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$ $$\begin{gather}\sigma_{ij} \sigma_{ik} n_j^y \dfrac{\partial c^{(0)}}{\partial y_k} = 0, \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$
$$\begin{gather}\sigma_{ij} \sigma_{ik} n_j^y \dfrac{\partial c^{(0)}}{\partial y_k} = 0, \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$ $$\begin{gather}{v}^{(0)}_i, \quad c^{(0)}\quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=} \quad \text{and}\quad \partial\omega_{\|}. \end{gather}$$
$$\begin{gather}{v}^{(0)}_i, \quad c^{(0)}\quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=} \quad \text{and}\quad \partial\omega_{\|}. \end{gather}$$
By inspection, we find that  $c^{(0)} = c^{(0)}(\boldsymbol {x},t)$ is a non-trivial solution to this system. By linearity, this solution is unique and therefore the leading-order concentration is independent of
$c^{(0)} = c^{(0)}(\boldsymbol {x},t)$ is a non-trivial solution to this system. By linearity, this solution is unique and therefore the leading-order concentration is independent of  $\boldsymbol {y}$.
$\boldsymbol {y}$.
Considering (3.26) at  $O(1)$, we obtain
$O(1)$, we obtain
 $$\begin{gather} \sigma_{ij} \sigma_{ik} \dfrac{\partial^2 c^{(1)}}{\partial y_j\partial y_k} = 0, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$
$$\begin{gather} \sigma_{ij} \sigma_{ik} \dfrac{\partial^2 c^{(1)}}{\partial y_j\partial y_k} = 0, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$ $$\begin{gather}\sigma_{ij} \sigma_{ik} n_j^y \dfrac{\partial c^{(1)}}{\partial y_k} ={-}\sigma_{ij}n_j^y \dfrac{\partial c^{(0)}}{\partial x_i}, \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$
$$\begin{gather}\sigma_{ij} \sigma_{ik} n_j^y \dfrac{\partial c^{(1)}}{\partial y_k} ={-}\sigma_{ij}n_j^y \dfrac{\partial c^{(0)}}{\partial x_i}, \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$ $$\begin{gather}{v}^{(1)}_i, \quad c^{(1)} \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad\text{and}\quad \partial\omega_{\|}, \end{gather}$$
$$\begin{gather}{v}^{(1)}_i, \quad c^{(1)} \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad\text{and}\quad \partial\omega_{\|}, \end{gather}$$
where we have used  $c^{(0)} = c^{(0)}(\boldsymbol {x},t)$, microscale incompressibility (3.14b) and the no-slip and no-penetration conditions (3.14c) on the solid surface. The form of (3.29) suggests that we can scale
$c^{(0)} = c^{(0)}(\boldsymbol {x},t)$, microscale incompressibility (3.14b) and the no-slip and no-penetration conditions (3.14c) on the solid surface. The form of (3.29) suggests that we can scale  $\boldsymbol {\nabla }_x c^{(0)}$ out of the problem via the substitution
$\boldsymbol {\nabla }_x c^{(0)}$ out of the problem via the substitution
 \begin{equation} c^{(1)}(\boldsymbol{x}, \boldsymbol{y},t) ={-} \dfrac{\partial c^{(0)}}{\partial x_n} \varGamma_n (\boldsymbol{x}, \boldsymbol{y}) + \breve{c}(\boldsymbol{x},t), \end{equation}
\begin{equation} c^{(1)}(\boldsymbol{x}, \boldsymbol{y},t) ={-} \dfrac{\partial c^{(0)}}{\partial x_n} \varGamma_n (\boldsymbol{x}, \boldsymbol{y}) + \breve{c}(\boldsymbol{x},t), \end{equation}
where  $\breve {c}$ is a scalar function and the functions
$\breve {c}$ is a scalar function and the functions  $\varGamma _n$ satisfy the following cell problems:
$\varGamma _n$ satisfy the following cell problems:
 $$\begin{gather} \sigma_{ij} \sigma_{ik} \dfrac{\partial^2 \varGamma_n}{\partial y_j\partial y_k} = 0, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$
$$\begin{gather} \sigma_{ij} \sigma_{ik} \dfrac{\partial^2 \varGamma_n}{\partial y_j\partial y_k} = 0, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$ $$\begin{gather}\sigma_{ij} \sigma_{ik} n_j^y \dfrac{\partial \varGamma_n}{\partial y_k} = \sigma_{ni}n_i^y, \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$
$$\begin{gather}\sigma_{ij} \sigma_{ik} n_j^y \dfrac{\partial \varGamma_n}{\partial y_k} = \sigma_{ni}n_i^y, \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$ $$\begin{gather}\varGamma_n \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}. \end{gather}$$
$$\begin{gather}\varGamma_n \quad \text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}. \end{gather}$$Note that we enforce
 \begin{equation} \langle\varGamma_n\rangle = 0, \end{equation}
\begin{equation} \langle\varGamma_n\rangle = 0, \end{equation}
which uniquely defines  $\varGamma _n$. Equations (3.31) are obtained by substituting (3.30) into (3.29). Equations (3.31) must then be solved numerically for
$\varGamma _n$. Equations (3.31) are obtained by substituting (3.30) into (3.29). Equations (3.31) must then be solved numerically for  $n\in \{1,2\}$ and each desired cell geometry (i.e. pairs of
$n\in \{1,2\}$ and each desired cell geometry (i.e. pairs of  $a$ and
$a$ and  $\lambda$). Note that (3.31) are independent of
$\lambda$). Note that (3.31) are independent of  $\boldsymbol {\nabla }_x c^{(0)}$, justifying our scalings in (3.30).
$\boldsymbol {\nabla }_x c^{(0)}$, justifying our scalings in (3.30).
The goal of this analysis remains to determine a macroscale equation for the concentration. Since there are no macroscopic transport mechanisms present at this order, there is not enough information to determine a macroscale governing equation for the concentration. Hence, we must proceed to the next order in (3.26), which yields
 $$\begin{gather} \frac{\partial c^{(0)}}{\partial t} = \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} + \dfrac{\partial \mathcal{B}_i}{\partial x_i}, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$
$$\begin{gather} \frac{\partial c^{(0)}}{\partial t} = \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} + \dfrac{\partial \mathcal{B}_i}{\partial x_i}, \quad \boldsymbol{y} \in \omega_f(x_1), \end{gather}$$ $$\begin{gather}-\gamma c^{(0)} \left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} = \sigma_{ij}n_j^y \mathcal{A}_i + N_i \mathcal{B}_i \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$
$$\begin{gather}-\gamma c^{(0)} \left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} = \sigma_{ij}n_j^y \mathcal{A}_i + N_i \mathcal{B}_i \quad \boldsymbol{y} \in \partial \omega_s({x_1}), \end{gather}$$ $$\begin{gather}{v}^{(2)}_i,\quad c^{(2)} \quad\text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}, \end{gather}$$
$$\begin{gather}{v}^{(2)}_i,\quad c^{(2)} \quad\text{periodic on} \quad \boldsymbol{y}\in\partial\omega_{=}\quad \text{and}\quad \partial\omega_{\|}, \end{gather}$$where
 $$\begin{gather} \mathcal{A}_i := \sigma_{ij} \dfrac{\partial c^{(2)}}{\partial y_j} + \dfrac{\partial c^{(1)}}{\partial x_i} - Pe \ \left( v^{(0)}_i c^{(1)} + v^{(1)}_i c^{(0)} \right), \end{gather}$$
$$\begin{gather} \mathcal{A}_i := \sigma_{ij} \dfrac{\partial c^{(2)}}{\partial y_j} + \dfrac{\partial c^{(1)}}{\partial x_i} - Pe \ \left( v^{(0)}_i c^{(1)} + v^{(1)}_i c^{(0)} \right), \end{gather}$$ $$\begin{gather}\mathcal{B}_i := \sigma_{ij} \dfrac{\partial c^{(1)}}{\partial y_j} + \dfrac{\partial c^{(0)}}{\partial x_i} - Pe \ v^{(0)}_i c^{(0)}. \end{gather}$$
$$\begin{gather}\mathcal{B}_i := \sigma_{ij} \dfrac{\partial c^{(1)}}{\partial y_j} + \dfrac{\partial c^{(0)}}{\partial x_i} - Pe \ v^{(0)}_i c^{(0)}. \end{gather}$$
Integrating (3.32a) over the transformed microscale fluid domain  $\omega _f$ gives
$\omega _f$ gives
 \begin{equation} |\omega_f| \frac{\partial c^{(0)}}{\partial t} = \int_{\omega_f} \, \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} \, \mathrm{d}S_y + \int_{\omega_f} \, \dfrac{\partial \mathcal{B}_i}{\partial x_i} \, \mathrm{d}S_y. \end{equation}
\begin{equation} |\omega_f| \frac{\partial c^{(0)}}{\partial t} = \int_{\omega_f} \, \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} \, \mathrm{d}S_y + \int_{\omega_f} \, \dfrac{\partial \mathcal{B}_i}{\partial x_i} \, \mathrm{d}S_y. \end{equation}Applying the divergence theorem to the first integral on the right-hand side of (3.33) yields
 \begin{equation} \int_{\omega_f} \, \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} \, \mathrm{d}S_y = \int_{\partial\omega_s} \, \sigma_{ij}n^y_j \mathcal{A}_i\, \mathrm{d}s_y+\int_{\partial\omega} \, \sigma_{ij}n^{\square}_j \mathcal{A}_i\, \mathrm{d}s_y, \end{equation}
\begin{equation} \int_{\omega_f} \, \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} \, \mathrm{d}S_y = \int_{\partial\omega_s} \, \sigma_{ij}n^y_j \mathcal{A}_i\, \mathrm{d}s_y+\int_{\partial\omega} \, \sigma_{ij}n^{\square}_j \mathcal{A}_i\, \mathrm{d}s_y, \end{equation}
where  $\mathrm {d}s_y$ signifies an element of a scalar line integral and
$\mathrm {d}s_y$ signifies an element of a scalar line integral and  $\boldsymbol {n}^{\square } = n^{\square }_j \boldsymbol {e}_j$ is the outward-facing unit normal to the external square boundary
$\boldsymbol {n}^{\square } = n^{\square }_j \boldsymbol {e}_j$ is the outward-facing unit normal to the external square boundary  $\partial \omega$. Since
$\partial \omega$. Since  $\mathcal {A}_i$ is periodic on
$\mathcal {A}_i$ is periodic on  $\partial \omega$, the last term on the right-hand side of (3.34) vanishes. Then, using (3.32b), we may re-write (3.34) as
$\partial \omega$, the last term on the right-hand side of (3.34) vanishes. Then, using (3.32b), we may re-write (3.34) as
 \begin{equation} \int_{\omega_f} \, \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} \, \mathrm{d}S_y ={-}\int_{\partial\omega_s} \, N_i \mathcal{B}_i \, \mathrm{d}s_y -\int_{\partial\omega_s} \, \gamma c^{(0)}\left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} \, \mathrm{d}s_y. \end{equation}
\begin{equation} \int_{\omega_f} \, \sigma_{ij}\dfrac{\partial \mathcal{A}_i}{\partial y_j} \, \mathrm{d}S_y ={-}\int_{\partial\omega_s} \, N_i \mathcal{B}_i \, \mathrm{d}s_y -\int_{\partial\omega_s} \, \gamma c^{(0)}\left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} \, \mathrm{d}s_y. \end{equation}To manipulate the final integral on the right-hand side of (3.33), we apply the transport theorem (A12)
 \begin{equation} \int_{\omega_f} \, \dfrac{\partial \mathcal{B}_i}{\partial x_i} \, \mathrm{d}S_y = \dfrac{\partial}{\partial x_i} \int_{\omega_f} \, \mathcal{B}_i \, \mathrm{d}S_y + \int_{\partial \omega_s}\, N_i \mathcal{B}_i \,\mathrm{d}s_y. \end{equation}
\begin{equation} \int_{\omega_f} \, \dfrac{\partial \mathcal{B}_i}{\partial x_i} \, \mathrm{d}S_y = \dfrac{\partial}{\partial x_i} \int_{\omega_f} \, \mathcal{B}_i \, \mathrm{d}S_y + \int_{\partial \omega_s}\, N_i \mathcal{B}_i \,\mathrm{d}s_y. \end{equation}Thus, combining (3.33), (3.35) and (3.36) we obtain
 \begin{align} |\omega_f| \frac{\partial c^{(0)}}{\partial t} &= \dfrac{\partial}{\partial x_i} \int_{\omega_f} \, \left[\sigma_{ij} \dfrac{\partial c^{(1)}}{\partial y_j} + \dfrac{\partial c^{(0)}}{\partial x_i} - Pe \ v^{(0)}_i c^{(0)}\right] \, \mathrm{d}S_y\notag\\ &\quad - \gamma c^{(0)} \int_{\partial\omega_s} \,\left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} \, \mathrm{d}s_y. \end{align}
\begin{align} |\omega_f| \frac{\partial c^{(0)}}{\partial t} &= \dfrac{\partial}{\partial x_i} \int_{\omega_f} \, \left[\sigma_{ij} \dfrac{\partial c^{(1)}}{\partial y_j} + \dfrac{\partial c^{(0)}}{\partial x_i} - Pe \ v^{(0)}_i c^{(0)}\right] \, \mathrm{d}S_y\notag\\ &\quad - \gamma c^{(0)} \int_{\partial\omega_s} \,\left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} \, \mathrm{d}s_y. \end{align} Using the definitions of  $c^{(1)}$ (3.30) and
$c^{(1)}$ (3.30) and  $\boldsymbol {V}^{(0)}$ (3.18a) and dividing through by
$\boldsymbol {V}^{(0)}$ (3.18a) and dividing through by  $|\omega _f| = \phi$, we can re-write (3.37) as
$|\omega _f| = \phi$, we can re-write (3.37) as
 \begin{equation} \frac{\partial C^{(0)}}{\partial t}= \dfrac{1}{|\omega_f| }\dfrac{\partial}{\partial \hat{x}_i}\left[|\omega_f| {\mathsf{D}}_{ij}(\phi,a) \dfrac{\partial C^{(0)}}{\partial \hat{x}_j} - Pe \ |\omega_f| V^{(0)}_i C^{(0)} \right] - \gamma F(\phi,a) C^{(0)}, \end{equation}
\begin{equation} \frac{\partial C^{(0)}}{\partial t}= \dfrac{1}{|\omega_f| }\dfrac{\partial}{\partial \hat{x}_i}\left[|\omega_f| {\mathsf{D}}_{ij}(\phi,a) \dfrac{\partial C^{(0)}}{\partial \hat{x}_j} - Pe \ |\omega_f| V^{(0)}_i C^{(0)} \right] - \gamma F(\phi,a) C^{(0)}, \end{equation}
where we have expanded the intrinsic concentration  $C$ in powers of
$C$ in powers of  $\epsilon$
$\epsilon$
 \begin{equation} C(\boldsymbol{x},t) = C^{(0)}(\boldsymbol{x},t) + \epsilon C^{(1)}(\boldsymbol{x}, t) + \epsilon^2 C^{(2)}(\boldsymbol{x},t) +\cdots \quad \text{as} \ \epsilon \to 0, \end{equation}
\begin{equation} C(\boldsymbol{x},t) = C^{(0)}(\boldsymbol{x},t) + \epsilon C^{(1)}(\boldsymbol{x}, t) + \epsilon^2 C^{(2)}(\boldsymbol{x},t) +\cdots \quad \text{as} \ \epsilon \to 0, \end{equation}
and have noted that  $C^{(0)}= c^{(0)}$. Note also that we have replaced
$C^{(0)}= c^{(0)}$. Note also that we have replaced  $x_i$ with
$x_i$ with  $\hat {x}_i$ in (3.38a) since it has been averaged over the microscale and is thus independent of
$\hat {x}_i$ in (3.38a) since it has been averaged over the microscale and is thus independent of  $\boldsymbol {y}$. In (3.38a), the components of the effective diffusivity tensor
$\boldsymbol {y}$. In (3.38a), the components of the effective diffusivity tensor  ${\mathsf{D}}_{ij}(\phi, a)$ are defined as
${\mathsf{D}}_{ij}(\phi, a)$ are defined as
 \begin{equation} {\mathsf{D}}_{ij}(\phi, a) := \delta_{ij} - \frac{1}{|\omega_f|} \int_{\omega_f} \, \sigma_{ij} \dfrac{\partial \varGamma_j}{\partial y_j} \, \mathrm{d}S_y = \delta_{ij} - \frac{1}{\phi} \int_{\omega_f} \, \sigma_{ij} \dfrac{\partial \varGamma_j}{\partial y_j} \, \mathrm{d}S_y, \end{equation}
\begin{equation} {\mathsf{D}}_{ij}(\phi, a) := \delta_{ij} - \frac{1}{|\omega_f|} \int_{\omega_f} \, \sigma_{ij} \dfrac{\partial \varGamma_j}{\partial y_j} \, \mathrm{d}S_y = \delta_{ij} - \frac{1}{\phi} \int_{\omega_f} \, \sigma_{ij} \dfrac{\partial \varGamma_j}{\partial y_j} \, \mathrm{d}S_y, \end{equation}
where  $\delta _{ij}$ is the Kronecker delta. The effective adsorption strength
$\delta _{ij}$ is the Kronecker delta. The effective adsorption strength  $F(\phi, a)$ is defined as
$F(\phi, a)$ is defined as
 \begin{equation} F(\phi,a) := \dfrac{1}{|\omega_f|} \int_{\partial\omega_s} \!\left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} \, \mathrm{d}s_y. \end{equation}
\begin{equation} F(\phi,a) := \dfrac{1}{|\omega_f|} \int_{\partial\omega_s} \!\left[\sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2} \, \mathrm{d}s_y. \end{equation}Hence, our homogenised transport equation is given by (3.38a), (3.38c) and (3.38d). In order to interpret the coefficients in this equation physically and evaluate them numerically, we now transform our coefficients into the naive microscale.
3.3.1. Transforming into the naive microscale coordinate
To interpret the rate  $F(\phi,a)$ physically, it is helpful to map its definition (3.38d) to the naive microscale coordinate
$F(\phi,a)$ physically, it is helpful to map its definition (3.38d) to the naive microscale coordinate  $\boldsymbol {Y}$, defined in (3.5), in a similar way to Richardson & Chapman (Reference Richardson and Chapman2011). Firstly, consider an arbitrary vector function
$\boldsymbol {Y}$, defined in (3.5), in a similar way to Richardson & Chapman (Reference Richardson and Chapman2011). Firstly, consider an arbitrary vector function  $\boldsymbol {z}(\boldsymbol {x},\boldsymbol {y},t) = \boldsymbol {z}^\star (\boldsymbol {x},\boldsymbol {Y},t)$, such that
$\boldsymbol {z}(\boldsymbol {x},\boldsymbol {y},t) = \boldsymbol {z}^\star (\boldsymbol {x},\boldsymbol {Y},t)$, such that  $\boldsymbol {z} = z_i\boldsymbol {e}_i$ and
$\boldsymbol {z} = z_i\boldsymbol {e}_i$ and  $\boldsymbol {z}^\star = z_i^\star \boldsymbol {e}_i$ then (3.8), with
$\boldsymbol {z}^\star = z_i^\star \boldsymbol {e}_i$ then (3.8), with  $Z = \boldsymbol {\nabla }_y^a\boldsymbol {\cdot }\boldsymbol {z} \equiv \boldsymbol {\nabla }_Y\boldsymbol {\cdot }\boldsymbol {z}^\star = Z^\star$ gives
$Z = \boldsymbol {\nabla }_y^a\boldsymbol {\cdot }\boldsymbol {z} \equiv \boldsymbol {\nabla }_Y\boldsymbol {\cdot }\boldsymbol {z}^\star = Z^\star$ gives
 \begin{equation} \frac{1}{|\omega(x_1)|}\int_{\omega(x_1)} \, \sigma_{ij}\frac{\partial z_i}{\partial y_j}, \mathrm{d} S_y \equiv \frac{1}{|\omega^{{\star}}(x_1)|}\int_{\omega^{{\star}}(x_1)} \ \frac{\partial z^\star_i}{\partial Y_i} \, \mathrm{d}S_Y. \end{equation}
\begin{equation} \frac{1}{|\omega(x_1)|}\int_{\omega(x_1)} \, \sigma_{ij}\frac{\partial z_i}{\partial y_j}, \mathrm{d} S_y \equiv \frac{1}{|\omega^{{\star}}(x_1)|}\int_{\omega^{{\star}}(x_1)} \ \frac{\partial z^\star_i}{\partial Y_i} \, \mathrm{d}S_Y. \end{equation}Applying the divergence theorem to both sides of (3.39) leads to the relation
 \begin{equation} \dfrac{1}{|\omega|}\int_{\partial\omega_s} \,\sigma_{ij} z_j n^y_i \, \mathrm{d}s_y = \dfrac{1}{|\omega^{{\star}}|} \int_{\partial\omega_s^{{\star}}} \!{n^Y_i}^\star z^\star_i \, \mathrm{d}s_Y, \end{equation}
\begin{equation} \dfrac{1}{|\omega|}\int_{\partial\omega_s} \,\sigma_{ij} z_j n^y_i \, \mathrm{d}s_y = \dfrac{1}{|\omega^{{\star}}|} \int_{\partial\omega_s^{{\star}}} \!{n^Y_i}^\star z^\star_i \, \mathrm{d}s_Y, \end{equation}
where  ${n}_i^Y(\boldsymbol {y}) = {n_i^{Y}}^\star (\boldsymbol {Y})$. Note that as
${n}_i^Y(\boldsymbol {y}) = {n_i^{Y}}^\star (\boldsymbol {Y})$. Note that as  $\boldsymbol {\sigma }$ is diagonal
$\boldsymbol {\sigma }$ is diagonal  $\sigma _{ij} z_j n^y_i = \sigma _{ij} n^y_jz_i$. Additionally, (3.25) lead to the relation
$\sigma _{ij} z_j n^y_i = \sigma _{ij} n^y_jz_i$. Additionally, (3.25) lead to the relation
 \begin{equation} \sigma_{ij} n^y_j = n^{Y}_{i} \left[\sigma_{kl} \sigma_{km} n_l^y n_m^y \right]^{1/2}. \end{equation}
\begin{equation} \sigma_{ij} n^y_j = n^{Y}_{i} \left[\sigma_{kl} \sigma_{km} n_l^y n_m^y \right]^{1/2}. \end{equation}
Thus, setting  $z_i=n_i^Y$ gives
$z_i=n_i^Y$ gives
 \begin{equation} \int_{\partial\omega_s} \left[\displaystyle \sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2}\,\mathrm{d}s_y =\int_{\partial\omega_s} \sigma_{ij} n^y_jn_i^Y\,\mathrm{d}s_y = \frac{|\omega|}{|\omega^\star|}\int_{\partial\omega_s^\star}\, \mathrm{d}s_Y = \frac{|\partial\omega_s^\star|}{|\omega^\star|}, \end{equation}
\begin{equation} \int_{\partial\omega_s} \left[\displaystyle \sigma_{kl}\sigma_{km} n^y_ln^y_m \right]^{1/2}\,\mathrm{d}s_y =\int_{\partial\omega_s} \sigma_{ij} n^y_jn_i^Y\,\mathrm{d}s_y = \frac{|\omega|}{|\omega^\star|}\int_{\partial\omega_s^\star}\, \mathrm{d}s_Y = \frac{|\partial\omega_s^\star|}{|\omega^\star|}, \end{equation}
since  $\boldsymbol {n}^Y\boldsymbol {\cdot }\boldsymbol {n}^Y = \boldsymbol {n}^{Y^\star }\boldsymbol {\cdot }\boldsymbol {n}^{Y^\star }= 1$ and
$\boldsymbol {n}^Y\boldsymbol {\cdot }\boldsymbol {n}^Y = \boldsymbol {n}^{Y^\star }\boldsymbol {\cdot }\boldsymbol {n}^{Y^\star }= 1$ and  $|\omega |=1$. Hence,
$|\omega |=1$. Hence,
 \begin{equation} F(\phi,a) = \frac{|\partial\omega_s^\star|}{|\omega_f\|\omega^\star|}\equiv \frac{|\partial\omega_s^\star|}{|\omega_f^\star|}, \end{equation}
\begin{equation} F(\phi,a) = \frac{|\partial\omega_s^\star|}{|\omega_f\|\omega^\star|}\equiv \frac{|\partial\omega_s^\star|}{|\omega_f^\star|}, \end{equation}
and we deduce that  $F$ represents the obstacle perimeter within a cell normalised by the fluid area within a cell.
$F$ represents the obstacle perimeter within a cell normalised by the fluid area within a cell.
Additionally, in order to evaluate  ${\mathsf{D}}_{ij}$ we find it convenient to map the system (3.31) to the naive microscale coordinate
${\mathsf{D}}_{ij}$ we find it convenient to map the system (3.31) to the naive microscale coordinate  $\boldsymbol {Y}$, defined in (3.5). This mapping transforms the cell problems (3.31) to
$\boldsymbol {Y}$, defined in (3.5). This mapping transforms the cell problems (3.31) to
 $$\begin{gather} \nabla^2_{Y} \varGamma_n^\star{=} 0, \quad \boldsymbol{Y} \in \omega_f^{{\star}}(x_1), \end{gather}$$
$$\begin{gather} \nabla^2_{Y} \varGamma_n^\star{=} 0, \quad \boldsymbol{Y} \in \omega_f^{{\star}}(x_1), \end{gather}$$ $$\begin{gather}{\boldsymbol{n}^Y}^\star \boldsymbol{\cdot} \nabla_{Y} \varGamma_n^\star{=} {n_k^Y}^\star, \quad \boldsymbol{Y} \in \partial \omega_s^{{\star}}({x_1}), \end{gather}$$
$$\begin{gather}{\boldsymbol{n}^Y}^\star \boldsymbol{\cdot} \nabla_{Y} \varGamma_n^\star{=} {n_k^Y}^\star, \quad \boldsymbol{Y} \in \partial \omega_s^{{\star}}({x_1}), \end{gather}$$ $$\begin{gather}\varGamma_n^\star \quad \text{periodic on} \ \boldsymbol{Y}\in\partial\omega_{=}^{{\star}}\quad \text{and}\quad \partial\omega_{\|}^{{\star}}, \end{gather}$$
$$\begin{gather}\varGamma_n^\star \quad \text{periodic on} \ \boldsymbol{Y}\in\partial\omega_{=}^{{\star}}\quad \text{and}\quad \partial\omega_{\|}^{{\star}}, \end{gather}$$with
 \begin{equation} \langle\varGamma_n^\star\rangle=0. \end{equation}
\begin{equation} \langle\varGamma_n^\star\rangle=0. \end{equation}The components of the effective diffusivity tensor (3.38c) become
 \begin{equation} {\mathsf{D}}_{ij}(\phi, a) = \delta_{ij} - \frac{1}{|\omega_f^{{\star}}|} \int_{\omega_f^{{\star}}} \, \dfrac{\partial \varGamma_j^\star}{\partial Y_i} \, \mathrm{d}S_Y = \delta_{ij} - \frac{1}{a \phi} \int_{\omega_f^{{\star}}} \! \dfrac{\partial \varGamma_j^\star}{\partial Y_i} \, \mathrm{d}S_Y. \end{equation}
\begin{equation} {\mathsf{D}}_{ij}(\phi, a) = \delta_{ij} - \frac{1}{|\omega_f^{{\star}}|} \int_{\omega_f^{{\star}}} \, \dfrac{\partial \varGamma_j^\star}{\partial Y_i} \, \mathrm{d}S_Y = \delta_{ij} - \frac{1}{a \phi} \int_{\omega_f^{{\star}}} \! \dfrac{\partial \varGamma_j^\star}{\partial Y_i} \, \mathrm{d}S_Y. \end{equation}
We can also write (3.45a) in tensor form  $\boldsymbol{\mathsf{D}}$ as
$\boldsymbol{\mathsf{D}}$ as
 \begin{equation} \boldsymbol{\mathsf{D}}(\phi, a) = \boldsymbol{\mathsf{I}} - \frac{1}{|\omega_f^{{\star}}|} \int_{\omega_f^{{\star}}} \boldsymbol{\nabla}_{Y}\otimes{\boldsymbol{\varGamma}}^\star \, \mathrm{d}S_Y. \end{equation}
\begin{equation} \boldsymbol{\mathsf{D}}(\phi, a) = \boldsymbol{\mathsf{I}} - \frac{1}{|\omega_f^{{\star}}|} \int_{\omega_f^{{\star}}} \boldsymbol{\nabla}_{Y}\otimes{\boldsymbol{\varGamma}}^\star \, \mathrm{d}S_Y. \end{equation}
To evaluate  $\boldsymbol{\mathsf{D}}$, we solve the transformed cell problems (3.44) numerically in COMSOL Multiphysics.
$\boldsymbol{\mathsf{D}}$, we solve the transformed cell problems (3.44) numerically in COMSOL Multiphysics.
Using the results from this subsection, we may re-write (3.38a) in vector/tensor form as
 \begin{equation} \frac{\partial C^{(0)}}{\partial t}= \dfrac{1}{\phi} \hat{\nabla} \boldsymbol{\cdot} \left(\phi \boldsymbol{\mathsf{D}} \hat{\nabla} C^{(0)} - Pe \ \phi \boldsymbol{V}^{(0)} C^{(0)}\right) - \gamma \dfrac{|\partial\omega_s^{{\star}}|}{|\omega_f^{{\star}}|} C^{(0)}. \end{equation}
\begin{equation} \frac{\partial C^{(0)}}{\partial t}= \dfrac{1}{\phi} \hat{\nabla} \boldsymbol{\cdot} \left(\phi \boldsymbol{\mathsf{D}} \hat{\nabla} C^{(0)} - Pe \ \phi \boldsymbol{V}^{(0)} C^{(0)}\right) - \gamma \dfrac{|\partial\omega_s^{{\star}}|}{|\omega_f^{{\star}}|} C^{(0)}. \end{equation}
Again, since there is no  $\boldsymbol {y}$-dependence in (3.45c), we have replaced
$\boldsymbol {y}$-dependence in (3.45c), we have replaced  $\boldsymbol {\nabla }_x$ with
$\boldsymbol {\nabla }_x$ with  $\hat {\boldsymbol {\nabla }}$. Equation (3.45c) describes macroscopic transport by advection and diffusion in a porous medium with chemical sorption, where
$\hat {\boldsymbol {\nabla }}$. Equation (3.45c) describes macroscopic transport by advection and diffusion in a porous medium with chemical sorption, where  $\phi \boldsymbol{\mathsf{D}}\boldsymbol {\cdot }\hat {\boldsymbol {\nabla }}C^{(0)}$ is the diffusive flux per unit area of porous medium and
$\phi \boldsymbol{\mathsf{D}}\boldsymbol {\cdot }\hat {\boldsymbol {\nabla }}C^{(0)}$ is the diffusive flux per unit area of porous medium and  $\boldsymbol{\mathsf{D}}\boldsymbol {\cdot }\hat {\boldsymbol {\nabla }}C^{(0)}$ is the diffusive flux per unit area of fluid. The form of the effective macroscale transport equation (3.45c) is similar to that obtained in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015), where a simpler problem with a constant cell size is considered, resulting in a more straightforward upscaling procedure. Here, we have formally accounted for a slowly varying cell size and a slowly varying microscale geometry. The most significant difference between structure of the macroscale (3.45c) and the equivalent result obtained from the classic homogenisation of a strictly periodic problem arises from the slowly varying microscale geometry, which manifests through the explicit (non-trivial) porosity dependence of the diffusive term (cf. Bruna & Chapman Reference Bruna and Chapman2015). We find that the effect of the slowly varying cell size is less important to the structural form of the derived macroscale equations, which was not known at the outset.
$\boldsymbol{\mathsf{D}}\boldsymbol {\cdot }\hat {\boldsymbol {\nabla }}C^{(0)}$ is the diffusive flux per unit area of fluid. The form of the effective macroscale transport equation (3.45c) is similar to that obtained in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015), where a simpler problem with a constant cell size is considered, resulting in a more straightforward upscaling procedure. Here, we have formally accounted for a slowly varying cell size and a slowly varying microscale geometry. The most significant difference between structure of the macroscale (3.45c) and the equivalent result obtained from the classic homogenisation of a strictly periodic problem arises from the slowly varying microscale geometry, which manifests through the explicit (non-trivial) porosity dependence of the diffusive term (cf. Bruna & Chapman Reference Bruna and Chapman2015). We find that the effect of the slowly varying cell size is less important to the structural form of the derived macroscale equations, which was not known at the outset.
Here, we have formally accounted for slowly varying cell size and slowly varying obstacle size. The resulting model has the same form as that derived in previous work for uniform cell size and slowly varying obstacle size (cf. Bruna & Chapman Reference Bruna and Chapman2015), in the sense that there are three macroscopic coefficients  $\boldsymbol{\mathsf{K}}$,
$\boldsymbol{\mathsf{K}}$,  $\boldsymbol{\mathsf{D}}$ and
$\boldsymbol{\mathsf{D}}$ and  $F$ that vary with the local microstructure via the values of
$F$ that vary with the local microstructure via the values of  $\phi$,
$\phi$,  $R$ and here also
$R$ and here also  $a$. Allowing for slowly varying cell size has not otherwise altered the mathematical structure of the macroscale problem at leading order, suggesting that different types of microscale heterogeneity can lead to a similar mathematical structure on the macroscale. The key difference between these heterogeneous results and the classical result for a uniform microstructure is that factors of porosity appear in front of the time derivative and within the divergence, the latter multiplying the macroscopic solute flux.
$a$. Allowing for slowly varying cell size has not otherwise altered the mathematical structure of the macroscale problem at leading order, suggesting that different types of microscale heterogeneity can lead to a similar mathematical structure on the macroscale. The key difference between these heterogeneous results and the classical result for a uniform microstructure is that factors of porosity appear in front of the time derivative and within the divergence, the latter multiplying the macroscopic solute flux.
In § 4, we calculate and discuss the permeability, effective diffusivity and effective adsorption strength for a porous medium with a simple, prescribed microstructure. Note that although our model problem of a one-dimensional filter in § 4.2 features flow in the longitudinal direction, the macroscopic flow and transport equations (3.20), (3.23) and (3.45c) and the results in § 4.1 are valid for any arbitrary flow direction.
4. Illustrative example
In this section, we examine a specific pore structure where the solid domain comprises an array of solid circular obstacles centred on a rectangular lattice. Specifically, each cell contains at its centre a fixed, rigid circular obstacle of dimensionless radius  $R({x}_1)$. Since
$R({x}_1)$. Since  $R(x_1)$ uniquely controls the obstacle size over the length of the medium, we take the scale factor
$R(x_1)$ uniquely controls the obstacle size over the length of the medium, we take the scale factor  $\lambda (x_1) = R(x_1)$. To prevent the obstacles from overlapping, we require that
$\lambda (x_1) = R(x_1)$. To prevent the obstacles from overlapping, we require that  $2R\leq {}\min (a,1)$. This construction leads to a porous medium whose properties vary in the longitudinal direction but not in the transverse direction (see figure 3). For this geometry the porosity
$2R\leq {}\min (a,1)$. This construction leads to a porous medium whose properties vary in the longitudinal direction but not in the transverse direction (see figure 3). For this geometry the porosity  $\phi$ is
$\phi$ is
 \begin{equation} \phi(x_1) = \frac{|\omega_f(x_1)|}{|\omega(x_1)|} = \frac{|\omega_f^{{\star}}(x_1)|}{|\omega^{{\star}}(x_1)|} \equiv 1-\frac{{\rm \pi} R(x_1)^2}{a(x_1)}, \end{equation}
\begin{equation} \phi(x_1) = \frac{|\omega_f(x_1)|}{|\omega(x_1)|} = \frac{|\omega_f^{{\star}}(x_1)|}{|\omega^{{\star}}(x_1)|} \equiv 1-\frac{{\rm \pi} R(x_1)^2}{a(x_1)}, \end{equation}
since  $|\omega ^{\star }| = a$ and
$|\omega ^{\star }| = a$ and  $|\omega _f^{\star }| = a - {\rm \pi}R^2$. Further, in this case we may explicitly evaluate the effective adsorption rate
$|\omega _f^{\star }| = a - {\rm \pi}R^2$. Further, in this case we may explicitly evaluate the effective adsorption rate  $F(\phi,a)$ in (3.38d) using the formulation from (3.43), giving
$F(\phi,a)$ in (3.38d) using the formulation from (3.43), giving
 \begin{equation} F(\phi,a) = \dfrac{|\partial \omega^{{\star}}_s|}{|\omega^{{\star}}_f|} = \frac{2 {\rm \pi}R}{a \phi } = \frac{2\left(1-\phi\right)}{R \phi}. \end{equation}
\begin{equation} F(\phi,a) = \dfrac{|\partial \omega^{{\star}}_s|}{|\omega^{{\star}}_f|} = \frac{2 {\rm \pi}R}{a \phi } = \frac{2\left(1-\phi\right)}{R \phi}. \end{equation}
Note that, with this geometry and in the limit  $a=1$, (3.38) become the same system as (3.22) in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) in two dimensions (i.e.
$a=1$, (3.38) become the same system as (3.22) in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) in two dimensions (i.e.  $d=2$), but written in terms of the intrinsic average rather than the volumetric average.
$d=2$), but written in terms of the intrinsic average rather than the volumetric average.

Figure 3. We consider the flow of fluid carrying solute through a heterogeneous porous medium in two dimensions for a specific illustrative example. Here, the porous medium is of unit length and is formed of an array of circular obstacles of dimensionless radius  $R({x}_1)$, each located in the centre of a rectangular cell of unit transverse height and longitudinal width
$R({x}_1)$, each located in the centre of a rectangular cell of unit transverse height and longitudinal width  $a({x}_1)$.
$a({x}_1)$.
4.1. Macroscale flow and transport properties
For this specific geometry we explore the impact of microstructure on macroscopic flow and transport by analysing the permeability and effective net diffusivity tensors,  $\boldsymbol{\mathsf{K}}$ and
$\boldsymbol{\mathsf{K}}$ and  $\phi \boldsymbol{\mathsf{D}}$, respectively. To determine
$\phi \boldsymbol{\mathsf{D}}$, respectively. To determine  $\boldsymbol{\mathsf{K}}$ we solve (3.24) in COMSOL Multiphysics using the ‘Laminar Flow (spf)’ interface (‘Fluid Flow’
$\boldsymbol{\mathsf{K}}$ we solve (3.24) in COMSOL Multiphysics using the ‘Laminar Flow (spf)’ interface (‘Fluid Flow’  $\to$ ‘Single Phase Flow’
$\to$ ‘Single Phase Flow’  $\to$ ‘Laminar flow (spf)’). The domain is discretised using the ‘Physics-controlled mesh’ with the element size set to ‘Extremely fine’. Similarly, to evaluate
$\to$ ‘Laminar flow (spf)’). The domain is discretised using the ‘Physics-controlled mesh’ with the element size set to ‘Extremely fine’. Similarly, to evaluate  $\boldsymbol{\mathsf{D}}$, we solve (3.44), in COMSOL Multiphysics using the ‘Laplace Equation (lpeq)’ interface (‘Classical PDEs’
$\boldsymbol{\mathsf{D}}$, we solve (3.44), in COMSOL Multiphysics using the ‘Laplace Equation (lpeq)’ interface (‘Classical PDEs’  $\to$ ‘Mathematics branch’
$\to$ ‘Mathematics branch’  $\to$ ‘Laplace Equation (lpeq)’). For the flow problem, the domain is discretised using the ‘Physics-controlled mesh’ with the element size set to ‘Extremely fine.’
$\to$ ‘Laplace Equation (lpeq)’). For the flow problem, the domain is discretised using the ‘Physics-controlled mesh’ with the element size set to ‘Extremely fine.’
The tensors  $\boldsymbol{\mathsf{K}}$ and
$\boldsymbol{\mathsf{K}}$ and  $\boldsymbol{\mathsf{D}}$ depend on microstructure via
$\boldsymbol{\mathsf{D}}$ depend on microstructure via  $a$,
$a$,  $\phi$ and
$\phi$ and  $R$, any two of which are independent and the third prescribed by (4.1) (figure 4). We therefore have one additional degree of microstructural freedom relative to Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) and this allows us to explore the anisotropy in the system. We explore the effect of the
$R$, any two of which are independent and the third prescribed by (4.1) (figure 4). We therefore have one additional degree of microstructural freedom relative to Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) and this allows us to explore the anisotropy in the system. We explore the effect of the  $a$,
$a$,  $R$ and
$R$ and  $\phi$ parameter space on
$\phi$ parameter space on  $\boldsymbol{\mathsf{K}}$ and
$\boldsymbol{\mathsf{K}}$ and  $\phi \boldsymbol{\mathsf{D}}$ in figures 5 and 6, respectively. The effective diffusivity
$\phi \boldsymbol{\mathsf{D}}$ in figures 5 and 6, respectively. The effective diffusivity  $\boldsymbol{\mathsf{D}}$ is shown for reference in figure 10a–d (Appendix B).
$\boldsymbol{\mathsf{D}}$ is shown for reference in figure 10a–d (Appendix B).

Figure 4. The porosity  $\phi$ of a rectangular cell increases with aspect ratio
$\phi$ of a rectangular cell increases with aspect ratio  $a$ and decreases with obstacle radius
$a$ and decreases with obstacle radius  $R$ according to (4.1). (a) Aspect ratio
$R$ according to (4.1). (a) Aspect ratio  $a$ vs
$a$ vs  $\phi$ for
$\phi$ for  $R\in \{0.05,0.1,0.15,0.2,0.25,0.3,0.35,0.4,0.45,0.5\}$ (dark to light). The attainable region of the
$R\in \{0.05,0.1,0.15,0.2,0.25,0.3,0.35,0.4,0.45,0.5\}$ (dark to light). The attainable region of the  $\phi$-
$\phi$- $a$ plane (shaded grey) is bounded below by
$a$ plane (shaded grey) is bounded below by  $\phi _{min}$ given by (3.9) with
$\phi _{min}$ given by (3.9) with  $a=2R$ (dot-dashed line). The cell geometry for two distinct points with
$a=2R$ (dot-dashed line). The cell geometry for two distinct points with  $R= 0.25$ is shown pictorially. (b) Aspect ratio
$R= 0.25$ is shown pictorially. (b) Aspect ratio  $a$ vs
$a$ vs  $R$ for
$R$ for  $\phi \in \{0.35, 0.45, 0.55, 0.65, 0.75, 0.85, 0.925, 0.975, 0.995, 0.999\}$ (dark to light). The attainable region of the
$\phi \in \{0.35, 0.45, 0.55, 0.65, 0.75, 0.85, 0.925, 0.975, 0.995, 0.999\}$ (dark to light). The attainable region of the  $R$–
$R$– $a$ plane (shaded grey) is also bounded below by
$a$ plane (shaded grey) is also bounded below by  $a_{min}:=2R$ (dot-dashed line). Note that the smallest attainable
$a_{min}:=2R$ (dot-dashed line). Note that the smallest attainable  $\phi$ for any
$\phi$ for any  $R$,
$R$,  $a$ combination is
$a$ combination is  $\phi _{min}(R=1/2)=1-{\rm \pi} /4$.
$\phi _{min}(R=1/2)=1-{\rm \pi} /4$.

Figure 5. The longitudinal permeability  ${{\mathsf{K}}}_{11}$ (a,b), transverse permeability
${{\mathsf{K}}}_{11}$ (a,b), transverse permeability  ${{\mathsf{K}}}_{22}$ (c,d) and the permeability–anisotropy ratio
${{\mathsf{K}}}_{22}$ (c,d) and the permeability–anisotropy ratio  ${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}$ (e, f) depend strongly on microstructure. Panels (a,c,e) show
${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}$ (e, f) depend strongly on microstructure. Panels (a,c,e) show  ${{\mathsf{K}}}_{11}$,
${{\mathsf{K}}}_{11}$,  ${{\mathsf{K}}}_{22}$ and
${{\mathsf{K}}}_{22}$ and  ${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}$ against
${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}$ against  $\phi$ for fixed values of
$\phi$ for fixed values of  $R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with
$R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with  $a$ varying according to (4.1). (b,d, f) Values of the same quantities against
$a$ varying according to (4.1). (b,d, f) Values of the same quantities against  $R$ for fixed values of
$R$ for fixed values of  $\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with
$\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with  $a$ varying according to (4.1). For a given value of
$a$ varying according to (4.1). For a given value of  $R$, the minimum porosity
$R$, the minimum porosity  $\phi _{min}(R)$ is given by (4.1) with
$\phi _{min}(R)$ is given by (4.1) with  $a=2R$. Note that
$a=2R$. Note that  ${{\mathsf{K}}}_{11}$ is non-zero at
${{\mathsf{K}}}_{11}$ is non-zero at  $\phi _{min}(R)$ for all values of
$\phi _{min}(R)$ for all values of  $\phi$ (dot-dashed curve, (a,b)), whereas
$\phi$ (dot-dashed curve, (a,b)), whereas  ${{\mathsf{K}}}_{22}$ vanishes at
${{\mathsf{K}}}_{22}$ vanishes at  $\phi _{min}$ ((c,e) red vertical asymptotes). There exists a smallest possible
$\phi _{min}$ ((c,e) red vertical asymptotes). There exists a smallest possible  $R$ for any given
$R$ for any given  $\phi$ ((d, f) red vertical asymptotes). In all cases,
$\phi$ ((d, f) red vertical asymptotes). In all cases,  ${{\mathsf{K}}}_{11}$ and
${{\mathsf{K}}}_{11}$ and  ${{\mathsf{K}}}_{22}$ are as defined in (3.20b) and calculated using COMSOL Multiphysics. The permeability is isotropic when
${{\mathsf{K}}}_{22}$ are as defined in (3.20b) and calculated using COMSOL Multiphysics. The permeability is isotropic when  $a\equiv 1$ (solid black curves; Dalwadi et al. Reference Dalwadi, Griffiths and Bruna2015). The limit
$a\equiv 1$ (solid black curves; Dalwadi et al. Reference Dalwadi, Griffiths and Bruna2015). The limit  $R\to 0$ and
$R\to 0$ and  $a \to 0$ corresponds to a set of parallel but disconnected channels with unit transverse width, for which
$a \to 0$ corresponds to a set of parallel but disconnected channels with unit transverse width, for which  $\phi \to 1$,
$\phi \to 1$,  ${{\mathsf{K}}}_{22}\to 0$ and
${{\mathsf{K}}}_{22}\to 0$ and  ${{\mathsf{K}}}_{11}\to 1/12$ (black diamonds in a,b).
${{\mathsf{K}}}_{11}\to 1/12$ (black diamonds in a,b).

Figure 6. The net longitudinal diffusivity  $\phi {{\mathsf{D}}}_{11}$ (a,b), net transverse diffusivity
$\phi {{\mathsf{D}}}_{11}$ (a,b), net transverse diffusivity  $\phi {{\mathsf{D}}}_{22}$ (c,d) and the diffusivity–anisotropy ratio
$\phi {{\mathsf{D}}}_{22}$ (c,d) and the diffusivity–anisotropy ratio  ${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ (e, f) depend strongly on microstructure. Panels (a,c,e) show
${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ (e, f) depend strongly on microstructure. Panels (a,c,e) show  $\phi {{\mathsf{D}}}_{11}$,
$\phi {{\mathsf{D}}}_{11}$,  $\phi {{\mathsf{D}}}_{22}$ and
$\phi {{\mathsf{D}}}_{22}$ and  ${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ against
${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ against  $\phi$ for fixed values of
$\phi$ for fixed values of  $R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with
$R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with  $a$ varying according to (4.1). Panels (b,d, f) show the same quantities against
$a$ varying according to (4.1). Panels (b,d, f) show the same quantities against  $R$ for fixed values of
$R$ for fixed values of  $\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with
$\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with  $a$ varying according to (4.1). For a given value of
$a$ varying according to (4.1). For a given value of  $R$, the minimum porosity
$R$, the minimum porosity  $\phi _{min}(R)$ is given by (4.1) with
$\phi _{min}(R)$ is given by (4.1) with  $a=2R$. Note that
$a=2R$. Note that  $\phi {{\mathsf{D}}}_{11}$ is non-zero at
$\phi {{\mathsf{D}}}_{11}$ is non-zero at  $\phi _{min}(R)$ for all values of
$\phi _{min}(R)$ for all values of  $\phi$ (dot-dashed curve, a,b), whereas
$\phi$ (dot-dashed curve, a,b), whereas  $\phi {{\mathsf{D}}}_{22}$ vanishes at
$\phi {{\mathsf{D}}}_{22}$ vanishes at  $\phi _{min}$. In all cases,
$\phi _{min}$. In all cases,  ${{\mathsf{D}}}_{11}$ and
${{\mathsf{D}}}_{11}$ and  ${{\mathsf{D}}}_{22}$ are as defined in (3.45a) and calculated using COMSOL Multiphysics. Both
${{\mathsf{D}}}_{22}$ are as defined in (3.45a) and calculated using COMSOL Multiphysics. Both  ${{\mathsf{D}}}_{11}$ and
${{\mathsf{D}}}_{11}$ and  ${{\mathsf{D}}}_{22}$ tend to 1 as
${{\mathsf{D}}}_{22}$ tend to 1 as  $\phi \to 1$, which corresponds to the limit of free-space diffusion. The net effective diffusivity,
$\phi \to 1$, which corresponds to the limit of free-space diffusion. The net effective diffusivity,  $\phi \boldsymbol{\mathsf{D}}$, is isotropic when
$\phi \boldsymbol{\mathsf{D}}$, is isotropic when  $a=1$ (solid black curves), in agreement with the results presented in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015).
$a=1$ (solid black curves), in agreement with the results presented in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015).
We have validated our analysis for this geometry in a number of ways. Firstly, we have compared our results with those in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) for the special case of  $a\equiv 1$, confirming both the final homogenised equations ((3.20), (3.45a), (3.45c) and (4.2)) and the detailed numerical results (black lines; figures 5–7). Secondly, we have confirmed our results in the Hele-Shaw limit of parallel, disconnected channels where the longitudinal permeability is
$a\equiv 1$, confirming both the final homogenised equations ((3.20), (3.45a), (3.45c) and (4.2)) and the detailed numerical results (black lines; figures 5–7). Secondly, we have confirmed our results in the Hele-Shaw limit of parallel, disconnected channels where the longitudinal permeability is  $1/12$ (black diamond; figure 5) and the transverse permeability vanishes. Finally, we have confirmed that both the transverse permeability and the transverse effective diffusivity vanish when the transverse connectivity vanishes (
$1/12$ (black diamond; figure 5) and the transverse permeability vanishes. Finally, we have confirmed that both the transverse permeability and the transverse effective diffusivity vanish when the transverse connectivity vanishes ( $a\to {}2R$ or
$a\to {}2R$ or  $2R\to {}a$; red lines in figures 5 and 6), and that the permeability diverges and the effective diffusivity tends to unity as the obstacles vanish (
$2R\to {}a$; red lines in figures 5 and 6), and that the permeability diverges and the effective diffusivity tends to unity as the obstacles vanish ( $\phi \to 1$).
$\phi \to 1$).

Figure 7. The effective adsorption rate  $F$ depends strongly on microstructure. (a) Effective adsorption strength
$F$ depends strongly on microstructure. (a) Effective adsorption strength  $F$ against
$F$ against  $\phi$ for fixed values of
$\phi$ for fixed values of  $R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with
$R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with  $a$ varying according to (4.1). (b) Effective adsorption strength
$a$ varying according to (4.1). (b) Effective adsorption strength  $F$ against
$F$ against  $R$ for fixed values of
$R$ for fixed values of  $\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with
$\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with  $a$ varying according to (4.1). In all cases,
$a$ varying according to (4.1). In all cases,  $F$ is as defined in (4.2). For a given value of
$F$ is as defined in (4.2). For a given value of  $R$, the minimum porosity
$R$, the minimum porosity  $\phi _{min}(R)$ is given by (4.1) with
$\phi _{min}(R)$ is given by (4.1) with  $a=2R$. The results of Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) are again reproduced when
$a=2R$. The results of Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) are again reproduced when  $a=1$ (solid black).
$a=1$ (solid black).
Increasing  $\phi$ at fixed
$\phi$ at fixed  $R$ is achieved by increasing
$R$ is achieved by increasing  $a$ (figure 4a), such that the obstacles move further apart in the longitudinal direction only; as a result,
$a$ (figure 4a), such that the obstacles move further apart in the longitudinal direction only; as a result,  ${{\mathsf{K}}}_{11}$,
${{\mathsf{K}}}_{11}$,  ${{\mathsf{K}}}_{22}$,
${{\mathsf{K}}}_{22}$,  $\phi {{\mathsf{D}}}_{11}$ and
$\phi {{\mathsf{D}}}_{11}$ and  $\phi {{\mathsf{D}}}_{22}$ all increase (figures 5a,c and 6a,c). As
$\phi {{\mathsf{D}}}_{22}$ all increase (figures 5a,c and 6a,c). As  $\phi \to 1$ (
$\phi \to 1$ ( $a\to \infty$), both
$a\to \infty$), both  ${{\mathsf{K}}}_{11}$ and
${{\mathsf{K}}}_{11}$ and  ${{\mathsf{K}}}_{22}$ diverge as the resistance to flow vanishes (figure 5a,c), and both
${{\mathsf{K}}}_{22}$ diverge as the resistance to flow vanishes (figure 5a,c), and both  $\phi {{\mathsf{D}}}_{11}$ and
$\phi {{\mathsf{D}}}_{11}$ and  $\phi {{\mathsf{D}}}_{22}$ tend to 1 as molecular diffusion becomes unobstructed (figure 6a,c). As
$\phi {{\mathsf{D}}}_{22}$ tend to 1 as molecular diffusion becomes unobstructed (figure 6a,c). As  $\phi \to \phi _{min}(R)$ (
$\phi \to \phi _{min}(R)$ ( $a\to 2R$) at fixed
$a\to 2R$) at fixed  $R$, the obstacles move closer together in the longitudinal direction and the pore space becomes disconnected in the transverse direction, so that
$R$, the obstacles move closer together in the longitudinal direction and the pore space becomes disconnected in the transverse direction, so that  ${{\mathsf{K}}}_{22}$ and
${{\mathsf{K}}}_{22}$ and  $\phi {{\mathsf{D}}}_{22}$ vanish;
$\phi {{\mathsf{D}}}_{22}$ vanish;  ${{\mathsf{K}}}_{11}$ and
${{\mathsf{K}}}_{11}$ and  $\phi {{\mathsf{D}}}_{11}$ are minimised but do not vanish. Further taking
$\phi {{\mathsf{D}}}_{11}$ are minimised but do not vanish. Further taking  $R\to 0$, the longitudinal problem reduces to a set of disconnected parallel channels of unit transverse width, for which
$R\to 0$, the longitudinal problem reduces to a set of disconnected parallel channels of unit transverse width, for which  ${{\mathsf{K}}}_{11}=1/12$ (figure 5a,b, black diamond).
${{\mathsf{K}}}_{11}=1/12$ (figure 5a,b, black diamond).
Increasing  $R$ at fixed
$R$ at fixed  $\phi$ is similarly achieved by increasing
$\phi$ is similarly achieved by increasing  $a$ (figure 4b), in which case the transverse channels between obstacles grow wider while the longitudinal channels between obstacles grow narrower. As a result,
$a$ (figure 4b), in which case the transverse channels between obstacles grow wider while the longitudinal channels between obstacles grow narrower. As a result,  ${{\mathsf{K}}}_{11}$ and
${{\mathsf{K}}}_{11}$ and  $\phi {{\mathsf{D}}}_{11}$ decrease while
$\phi {{\mathsf{D}}}_{11}$ decrease while  ${{\mathsf{K}}}_{22}$ and
${{\mathsf{K}}}_{22}$ and  $\phi {{\mathsf{D}}}_{22}$ increase. As
$\phi {{\mathsf{D}}}_{22}$ increase. As  $R \to 1/2$ at fixed
$R \to 1/2$ at fixed  $\phi$, the longitudinal channels close and
$\phi$, the longitudinal channels close and  ${{\mathsf{K}}}_{11}$ and
${{\mathsf{K}}}_{11}$ and  $\phi {{\mathsf{D}}}_{11}$ vanish, but the transverse channels become wider and
$\phi {{\mathsf{D}}}_{11}$ vanish, but the transverse channels become wider and  ${{\mathsf{K}}}_{22}$ and
${{\mathsf{K}}}_{22}$ and  $\phi {{\mathsf{D}}}_{22}$ are maximised. The longitudinal permeability,
$\phi {{\mathsf{D}}}_{22}$ are maximised. The longitudinal permeability,  ${{\mathsf{K}}}_{11}$, is weakly non-monotonic in
${{\mathsf{K}}}_{11}$, is weakly non-monotonic in  $R$ for larger values of
$R$ for larger values of  $\phi$ (figure 5b), which means that the longitudinal permeability of a high-porosity porous medium can be maximised for a given
$\phi$ (figure 5b), which means that the longitudinal permeability of a high-porosity porous medium can be maximised for a given  $\phi$ by appropriately varying
$\phi$ by appropriately varying  $R$ and
$R$ and  $a$.
$a$.
When  $a\equiv 1$, equivalent to the case considered in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015),
$a\equiv 1$, equivalent to the case considered in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015),  $\boldsymbol{\mathsf{K}}$ and
$\boldsymbol{\mathsf{K}}$ and  $\phi \boldsymbol{\mathsf{D}}$ become isotropic. Increasing
$\phi \boldsymbol{\mathsf{D}}$ become isotropic. Increasing  $\phi$ corresponds to decreasing
$\phi$ corresponds to decreasing  $R$, in which case both the longitudinal and transverse spacing between obstacles decreases (figure 4) which decreases
$R$, in which case both the longitudinal and transverse spacing between obstacles decreases (figure 4) which decreases  ${{\mathsf{K}}}_{11}={{\mathsf{K}}}_{22}$ and
${{\mathsf{K}}}_{11}={{\mathsf{K}}}_{22}$ and  $\phi {{\mathsf{D}}}_{11}=\phi {{\mathsf{D}}}_{22}$ (figures 5 and 6, solid black lines). For
$\phi {{\mathsf{D}}}_{11}=\phi {{\mathsf{D}}}_{22}$ (figures 5 and 6, solid black lines). For  $a\not =1$, our microstructure is inherently anisotropic (
$a\not =1$, our microstructure is inherently anisotropic ( ${{\mathsf{K}}}_{11}\neq {{\mathsf{K}}}_{22}$,
${{\mathsf{K}}}_{11}\neq {{\mathsf{K}}}_{22}$,  $\phi {{\mathsf{D}}}_{11}\neq \phi {{\mathsf{D}}}_{22}$). For
$\phi {{\mathsf{D}}}_{11}\neq \phi {{\mathsf{D}}}_{22}$). For  $a<1$, the longitudinal channels are wider than the transverse channels, such that
$a<1$, the longitudinal channels are wider than the transverse channels, such that  ${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}<1$ and
${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}<1$ and  ${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}<1$ and both ratios vanish as
${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}<1$ and both ratios vanish as  $a\to 2R$ (
$a\to 2R$ ( $\phi \to \phi _{min}$ where
$\phi \to \phi _{min}$ where  $\phi _{min}$ is given by (4.1); figures 5(e, f) and 6(e, f), respectively). For
$\phi _{min}$ is given by (4.1); figures 5(e, f) and 6(e, f), respectively). For  $a>1$, the longitudinal channels are narrower than the transverse channels, such that
$a>1$, the longitudinal channels are narrower than the transverse channels, such that  ${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}> 1$ and
${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}> 1$ and  ${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}>1$. The permeability–anisotropy ratio,
${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}>1$. The permeability–anisotropy ratio,  ${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}$, increases monotonically with both
${{\mathsf{K}}}_{22}/{{\mathsf{K}}}_{11}$, increases monotonically with both  $\phi$ and
$\phi$ and  $R$, and diverges as
$R$, and diverges as  $\phi \to 1$ at fixed
$\phi \to 1$ at fixed  $R$ (
$R$ ( ${{\mathsf{K}}}_{22}$ diverges faster than
${{\mathsf{K}}}_{22}$ diverges faster than  ${{\mathsf{K}}}_{11}$ because the obstacles never get further apart in the transverse direction) and as
${{\mathsf{K}}}_{11}$ because the obstacles never get further apart in the transverse direction) and as  $R\to 1/2$ at fixed
$R\to 1/2$ at fixed  $\phi$ (
$\phi$ ( ${{\mathsf{K}}}_{11}$ vanishes; figure 5e, f). The diffusivity–anisotropy ratio,
${{\mathsf{K}}}_{11}$ vanishes; figure 5e, f). The diffusivity–anisotropy ratio,  ${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$, increases monotonically with
${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$, increases monotonically with  $R$ for all
$R$ for all  $\phi \in (\phi _{min},1)$, diverging as
$\phi \in (\phi _{min},1)$, diverging as  $R\to 1/2$ (figure 6f). For fixed
$R\to 1/2$ (figure 6f). For fixed  $R$, this ratio increases monotonically with
$R$, this ratio increases monotonically with  $\phi$ for
$\phi$ for  $a\leq 1$, is equal to unity for
$a\leq 1$, is equal to unity for  $a=1$ (isotropic geometry), and must approach unity as
$a=1$ (isotropic geometry), and must approach unity as  $\phi \to 1$ (
$\phi \to 1$ ( $a\to \infty$; unobstructed molecular diffusion; figure 6e). These bounds require that
$a\to \infty$; unobstructed molecular diffusion; figure 6e). These bounds require that  ${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ has an intermediate maximum in
${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ has an intermediate maximum in  $\phi$ (or in
$\phi$ (or in  $a$) at fixed
$a$) at fixed  $R$, the amplitude of which diverges as
$R$, the amplitude of which diverges as  $R\to 1/2$. Specifically, the non-monotonicity in the ratio
$R\to 1/2$. Specifically, the non-monotonicity in the ratio  ${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ occurs due to the relative rates of increase of
${{\mathsf{D}}}_{22}/{{\mathsf{D}}}_{11}$ occurs due to the relative rates of increase of  $\phi {{\mathsf{D}}}_{11}$ and
$\phi {{\mathsf{D}}}_{11}$ and  $\phi {{\mathsf{D}}}_{22}$. For
$\phi {{\mathsf{D}}}_{22}$. For  $\phi =\phi _{min}$ (
$\phi =\phi _{min}$ ( $a = 2R$) there is no transverse connectivity thus separating the obstacles slightly (a small increase in
$a = 2R$) there is no transverse connectivity thus separating the obstacles slightly (a small increase in  $a$) leads to a sharp increase in
$a$) leads to a sharp increase in  $\phi {{\mathsf{D}}}_{22}$ but only a slight increase in
$\phi {{\mathsf{D}}}_{22}$ but only a slight increase in  $\phi {{\mathsf{D}}}_{11}$ since the longitudinal connectivity is unchanged and most longitudinal mixing occurs in the longitudinal channels. Conversely, as
$\phi {{\mathsf{D}}}_{11}$ since the longitudinal connectivity is unchanged and most longitudinal mixing occurs in the longitudinal channels. Conversely, as  $\phi \to 1$ (
$\phi \to 1$ ( $a\to \infty$) the longitudinal spacing between obstacles diverges which means that
$a\to \infty$) the longitudinal spacing between obstacles diverges which means that  $\phi {{\mathsf{D}}}_{11}$ is very sensitive to changes in
$\phi {{\mathsf{D}}}_{11}$ is very sensitive to changes in  $a$ as longitudinal mixing occurs predominantly between longitudinally adjacent obstacles (in the transverse channels), thus
$a$ as longitudinal mixing occurs predominantly between longitudinally adjacent obstacles (in the transverse channels), thus  $\phi {{\mathsf{D}}}_{11}$ rapidly approaches unity. However, significant transverse connectivity is preserved for large
$\phi {{\mathsf{D}}}_{11}$ rapidly approaches unity. However, significant transverse connectivity is preserved for large  $a$ so increasing
$a$ so increasing  $a$ further has minimal effect on
$a$ further has minimal effect on  $\phi {{\mathsf{D}}}_{22}$ since most transverse mixing occurs in the transverse channels in this limit. Note that the longitudinal diffusivity
$\phi {{\mathsf{D}}}_{22}$ since most transverse mixing occurs in the transverse channels in this limit. Note that the longitudinal diffusivity  ${{\mathsf{D}}}_{11}$ is non-monotonic in
${{\mathsf{D}}}_{11}$ is non-monotonic in  $\phi$ for each
$\phi$ for each  $R$ as
$R$ as  $a$ varies (Appendix B, figure 10).
$a$ varies (Appendix B, figure 10).
The partially absorbing boundary condition on the microscale, whose strength is measured by the parameter  ${\gamma }$ in (2.7b), leads to an effective sink term in the macroscale transport problem, whose strength is measured by
${\gamma }$ in (2.7b), leads to an effective sink term in the macroscale transport problem, whose strength is measured by  $\gamma F$, where
$\gamma F$, where  $F$ is given in (4.2). Here,
$F$ is given in (4.2). Here,  $F$ is the ratio of the perimeter of an obstacle to the fluid area within a cell, which are
$F$ is the ratio of the perimeter of an obstacle to the fluid area within a cell, which are  $2{\rm \pi} {}R$ and
$2{\rm \pi} {}R$ and  $a \phi$, respectively, for a rectangular array of circular obstacles. We consider the impact of microstructure on the removal of solute in more detail in § 4.2. Note that
$a \phi$, respectively, for a rectangular array of circular obstacles. We consider the impact of microstructure on the removal of solute in more detail in § 4.2. Note that  $F$ decreases as
$F$ decreases as  $\phi$ increases at fixed
$\phi$ increases at fixed  $R$, as should be expected, but also as
$R$, as should be expected, but also as  $R$ increases at fixed
$R$ increases at fixed  $\phi$; the latter occurs because an increase in obstacle size requires a correspondingly larger increase in cell size to keep
$\phi$; the latter occurs because an increase in obstacle size requires a correspondingly larger increase in cell size to keep  $\phi$ constant. We consider the impact of microstructure on the removal of solute in more detail in § 4.2.
$\phi$ constant. We consider the impact of microstructure on the removal of solute in more detail in § 4.2.
4.2. Simple one-dimensional filter
We now use the homogenised model to understand the effect of microstructure and Péclet number on filter efficiency in the context of a simple one-dimensional steady-state filtration problem. We identify the performance of the filter with the rate at which it removes solute, and thus use the leading-order outlet concentration  $C_{{out}}^{(0)}$ as a measure of filtration efficiency. Specifically, we consider (3.20) and (3.38) at steady state, with imposed flux and concentration at the inlet,
$C_{{out}}^{(0)}$ as a measure of filtration efficiency. Specifically, we consider (3.20) and (3.38) at steady state, with imposed flux and concentration at the inlet,
 $$\begin{gather} \phi{\boldsymbol{V}^{(0)}} = \boldsymbol{e}_1 \quad \text{at} \ \hat{x}_1 = 0, \end{gather}$$
$$\begin{gather} \phi{\boldsymbol{V}^{(0)}} = \boldsymbol{e}_1 \quad \text{at} \ \hat{x}_1 = 0, \end{gather}$$ $$\begin{gather}C^{(0)} = 1 \quad \text{at} \ \hat{x}_1 = 0, \end{gather}$$
$$\begin{gather}C^{(0)} = 1 \quad \text{at} \ \hat{x}_1 = 0, \end{gather}$$and passive outflow at the outlet,
 \begin{equation} \frac{\partial C^{(0)}}{\partial \hat{x}_1} = 0 \quad \text{at} \ \hat{x}_1 = 1. \end{equation}
\begin{equation} \frac{\partial C^{(0)}}{\partial \hat{x}_1} = 0 \quad \text{at} \ \hat{x}_1 = 1. \end{equation}
Since these boundary conditions (4.3a) are compatible with unidirectional flow, we take  $\boldsymbol {V}^{(0)}(\hat {\boldsymbol {x}})=V_1^{(0)}(\hat {x}_1)\boldsymbol {e}_1$ and
$\boldsymbol {V}^{(0)}(\hat {\boldsymbol {x}})=V_1^{(0)}(\hat {x}_1)\boldsymbol {e}_1$ and  $C^{(0)}(\hat {\boldsymbol {x}},t) = C^{(0)}(\hat {{x}}_1)$. Thus, (3.23) leads to
$C^{(0)}(\hat {\boldsymbol {x}},t) = C^{(0)}(\hat {{x}}_1)$. Thus, (3.23) leads to
 \begin{equation} \frac{\mathrm{d}}{\mathrm{d}\hat{x}_1} \left( \phi V_1^{(0)} \right) = 0, \end{equation}
\begin{equation} \frac{\mathrm{d}}{\mathrm{d}\hat{x}_1} \left( \phi V_1^{(0)} \right) = 0, \end{equation}
which, on application of the inlet condition (4.3a), gives the macroscale flux  $\phi {V}_1^{(0)} \equiv 1$ for all
$\phi {V}_1^{(0)} \equiv 1$ for all  $\hat {x}_1$. The associated pressure drop across the entire filter,
$\hat {x}_1$. The associated pressure drop across the entire filter,  $\Delta P^{(0)}$, is obtained by integrating (3.20) and using the fact that
$\Delta P^{(0)}$, is obtained by integrating (3.20) and using the fact that  $\phi {V}_1^{(0)} \equiv 1$, which gives
$\phi {V}_1^{(0)} \equiv 1$, which gives
 \begin{equation} \Delta P^{(0)} = \int_0^1 \frac{1}{{{\mathsf{K}}}_{11}(x)}\,\mathrm{d}x. \end{equation}
\begin{equation} \Delta P^{(0)} = \int_0^1 \frac{1}{{{\mathsf{K}}}_{11}(x)}\,\mathrm{d}x. \end{equation}Note that the right-hand side of (4.5) is a measure of the total flow resistance of the entire filter; the inverse of this quantity can be thought of as an effective permeability for the entire filter.
Hence, the homogenised governing equation for the steady concentration distribution  $C^{(0)}(\hat {x}_1)$ (3.45c) becomes
$C^{(0)}(\hat {x}_1)$ (3.45c) becomes
 \begin{equation} \dfrac{1}{\phi}\frac{\mathrm{d}}{\mathrm{d} \hat{x}_1} \left[ \phi {{\mathsf{D}}}_{11}(\phi, R) \frac{\mathrm{d} C^{(0)}}{\mathrm{d} \hat{x}_1} - Pe \ C^{(0)} \right] = \gamma F(\phi, R) C^{(0)} \quad \text{for} \ \hat{x}_1 \in (0, 1), \end{equation}
\begin{equation} \dfrac{1}{\phi}\frac{\mathrm{d}}{\mathrm{d} \hat{x}_1} \left[ \phi {{\mathsf{D}}}_{11}(\phi, R) \frac{\mathrm{d} C^{(0)}}{\mathrm{d} \hat{x}_1} - Pe \ C^{(0)} \right] = \gamma F(\phi, R) C^{(0)} \quad \text{for} \ \hat{x}_1 \in (0, 1), \end{equation}
where  $F(\phi, R)$ is defined in (3.43). We solve (4.6) subject to (4.3b) and (4.3c) numerically using a finite-difference scheme. We discretise the interval [0, 1] using a uniform mesh of size
$F(\phi, R)$ is defined in (3.43). We solve (4.6) subject to (4.3b) and (4.3c) numerically using a finite-difference scheme. We discretise the interval [0, 1] using a uniform mesh of size  $\Delta x = 1/N$ and we approximate derivatives using a second-order-accurate central-difference formula. The results presented below were obtained using
$\Delta x = 1/N$ and we approximate derivatives using a second-order-accurate central-difference formula. The results presented below were obtained using  $N = 500$. Below, we consider filters with varying porosity and filters with uniform porosity, but with heterogeneous microstructure in both cases.
$N = 500$. Below, we consider filters with varying porosity and filters with uniform porosity, but with heterogeneous microstructure in both cases.
4.2.1. Porosity gradients
We first consider filters with varying porosity. Recall that a given porosity  $\phi$ may be achieved in two different ways: by fixing
$\phi$ may be achieved in two different ways: by fixing  $a(\hat {x}_1)$ and varying
$a(\hat {x}_1)$ and varying  $R(\hat {x}_1)$, as considered in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) for
$R(\hat {x}_1)$, as considered in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015) for  $a\equiv 1$; or by fixing
$a\equiv 1$; or by fixing  $R(\hat {x}_1)$ and varying
$R(\hat {x}_1)$ and varying  $a(\hat {x}_1)$. We consider these options in figure 8, for the same three porosity fields in both cases: linearly increasing with
$a(\hat {x}_1)$. We consider these options in figure 8, for the same three porosity fields in both cases: linearly increasing with  $\hat {x}_1$, uniform in
$\hat {x}_1$, uniform in  $\hat {x}_1$, or linearly decreasing with
$\hat {x}_1$, or linearly decreasing with  $\hat {x}_1$. Specifically, we take
$\hat {x}_1$. Specifically, we take  $\phi (\hat {x}_1) = \phi _0 + m_\phi (\hat {x}_1-0.5)$, where
$\phi (\hat {x}_1) = \phi _0 + m_\phi (\hat {x}_1-0.5)$, where  $\phi _0$ is the average porosity (also the mid-point porosity) and
$\phi _0$ is the average porosity (also the mid-point porosity) and  $m_\phi$ is the porosity gradient. We take
$m_\phi$ is the porosity gradient. We take  $\phi _0=0.8$ and
$\phi _0=0.8$ and  $m_\phi =0.3$ (increasing in
$m_\phi =0.3$ (increasing in  $\hat {x}_1$),
$\hat {x}_1$),  $m_\phi =0$ (uniform in
$m_\phi =0$ (uniform in  $\hat {x}_1$), or
$\hat {x}_1$), or  $m_\phi =-0.3$ (decreasing in
$m_\phi =-0.3$ (decreasing in  $\hat {x}_1$). Note that
$\hat {x}_1$). Note that  $|m_\phi |$ defines the filter microstructure and
$|m_\phi |$ defines the filter microstructure and  $\mathrm {sgn}(m_\phi )$ is simply the orientation of the filter.
$\mathrm {sgn}(m_\phi )$ is simply the orientation of the filter.

Figure 8. Steady-state concentration field  $C^{(0)}(\hat {x}_1)$ for
$C^{(0)}(\hat {x}_1)$ for  $Pe \in \{ 0, 1, 5\}$ (a,c) and outlet concentration
$Pe \in \{ 0, 1, 5\}$ (a,c) and outlet concentration  $C_{out}^{(0)}:= C^{(0)}(1)$ as a function of
$C_{out}^{(0)}:= C^{(0)}(1)$ as a function of  $Pe$ (b,d). Panels (a,b) show
$Pe$ (b,d). Panels (a,b) show  $a\equiv 1$ and
$a\equiv 1$ and  $\phi (\hat {x}_1) = 0.8 + m_\phi (\hat {x}_1 - 0.5)$. Panels (c,d) show
$\phi (\hat {x}_1) = 0.8 + m_\phi (\hat {x}_1 - 0.5)$. Panels (c,d) show  $R\equiv 0.4$ and
$R\equiv 0.4$ and  $\phi (\hat {x}_1) = 0.8 + m_\phi (\hat {x}_1 - 0.5)$. In both cases,
$\phi (\hat {x}_1) = 0.8 + m_\phi (\hat {x}_1 - 0.5)$. In both cases,  $m_\phi = 0.3$ (solid),
$m_\phi = 0.3$ (solid),  $m_{\phi } = 0$ (dotted) and
$m_{\phi } = 0$ (dotted) and  $m_\phi = -0.3$ (dashed).
$m_\phi = -0.3$ (dashed).
When varying  $\phi$ by varying
$\phi$ by varying  $R$ at fixed
$R$ at fixed  $a\equiv 1$, as considered by Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015), the sign of the porosity gradient has a modest impact on the concentration distribution within the filter:
$a\equiv 1$, as considered by Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015), the sign of the porosity gradient has a modest impact on the concentration distribution within the filter:  $m_\phi >0$ leads to a steeper gradient in
$m_\phi >0$ leads to a steeper gradient in  $C^{(0)}$ near the inlet and a shallower gradient in
$C^{(0)}$ near the inlet and a shallower gradient in  $C^{(0)}$ near the outlet, whereas
$C^{(0)}$ near the outlet, whereas  $m_\phi <0$ leads to a more uniform gradient in
$m_\phi <0$ leads to a more uniform gradient in  $C^{(0)}$ throughout the filter (figure 8a). However, the outlet concentration
$C^{(0)}$ throughout the filter (figure 8a). However, the outlet concentration  $C_{out}^{(0)}:= C^{(0)}(1)$ is remarkably insensitive to
$C_{out}^{(0)}:= C^{(0)}(1)$ is remarkably insensitive to  $m_\phi$. The outlet concentration is slightly lower for
$m_\phi$. The outlet concentration is slightly lower for  $m_\phi <0$, and this slight difference decreases as
$m_\phi <0$, and this slight difference decreases as  $Pe$ increases (figure 8b). As
$Pe$ increases (figure 8b). As  $Pe$ increases, advection becomes stronger causing more solute to be swept through the filter; as a result,
$Pe$ increases, advection becomes stronger causing more solute to be swept through the filter; as a result,  $C^{(0)}(\hat {x}_1)$ increases with
$C^{(0)}(\hat {x}_1)$ increases with  $Pe$ for all
$Pe$ for all  $\hat {x}_1$ and
$\hat {x}_1$ and  $C^{(0)}_{out}$ more than doubles as
$C^{(0)}_{out}$ more than doubles as  $Pe$ increases from 0 to 10. The case when
$Pe$ increases from 0 to 10. The case when  $a\equiv 1$ is considered in more detail in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015). Varying
$a\equiv 1$ is considered in more detail in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015). Varying  $\phi$ by varying
$\phi$ by varying  $a$ at fixed
$a$ at fixed  $R\equiv 0.4$ leads to qualitatively similar results, but
$R\equiv 0.4$ leads to qualitatively similar results, but  $C^{(0)}(x)$ and
$C^{(0)}(x)$ and  $C^{(0)}_{out}$ are more sensitive to
$C^{(0)}_{out}$ are more sensitive to  $m_\phi$ (figure 8c,d). For all
$m_\phi$ (figure 8c,d). For all  $Pe$, attaining a desired porosity gradient via varying
$Pe$, attaining a desired porosity gradient via varying  $R$ leads to a more efficient filter than varying
$R$ leads to a more efficient filter than varying  $a$, in the sense that
$a$, in the sense that  $C_{out}^{(0)}$ is lower for the same
$C_{out}^{(0)}$ is lower for the same  $\phi (x_1)$.
$\phi (x_1)$.
4.2.2. Microstructural gradients with uniform porosity
We now consider filters with uniform porosity but gradients in microstructure. We therefore fix  $\phi$ and simultaneously vary
$\phi$ and simultaneously vary  $R$ and
$R$ and  $a$ with
$a$ with  $\hat {x}_1$, recalling that
$\hat {x}_1$, recalling that  $a$ is related to
$a$ is related to  $R$ via (4.1). We consider two types of variation: an imposed gradient in
$R$ via (4.1). We consider two types of variation: an imposed gradient in  $R$ with
$R$ with  $a$ varying to maintain constant
$a$ varying to maintain constant  $\phi$ (via (4.1)) or an imposed gradient in
$\phi$ (via (4.1)) or an imposed gradient in  $a$ with
$a$ with  $R$ varying to maintain constant
$R$ varying to maintain constant  $\phi$ (via (4.1)). We consider these options in figure 9.
$\phi$ (via (4.1)). We consider these options in figure 9.

Figure 9. Steady-state concentration field  $C^{(0)}(\hat {x}_1)$ for
$C^{(0)}(\hat {x}_1)$ for  $\phi \in \{0.7, 0.8, 0.9\}$ (a,c), and outlet concentration
$\phi \in \{0.7, 0.8, 0.9\}$ (a,c), and outlet concentration  $C_{out}^{(0)}:= C^{(0)}(1)$ as a function of
$C_{out}^{(0)}:= C^{(0)}(1)$ as a function of  $\phi$ (b,d). Panels (a,b) show
$\phi$ (b,d). Panels (a,b) show  $Pe = 1$ and
$Pe = 1$ and  $R(\hat {x}_1) = 0.36 + m_R(\hat {x}_1-0.5)$ for
$R(\hat {x}_1) = 0.36 + m_R(\hat {x}_1-0.5)$ for  $m_R = 0.14$ (solid),
$m_R = 0.14$ (solid),  $m_{R} = 0$ (dotted),
$m_{R} = 0$ (dotted),  $m_R = -0.14$ (dashed). The aspect ratio
$m_R = -0.14$ (dashed). The aspect ratio  $a$ varies following (4.1). For
$a$ varies following (4.1). For  $R_0=0.36$ and
$R_0=0.36$ and  $m_R=\pm 0.14$ the minimum attainable porosity is
$m_R=\pm 0.14$ the minimum attainable porosity is  $1-0.145{\rm \pi} \approx 0.54$ ((b); black dots). Panels (c,d) show
$1-0.145{\rm \pi} \approx 0.54$ ((b); black dots). Panels (c,d) show  $Pe = 1$ and
$Pe = 1$ and  $a(\hat {x}_1) = 1.34 + m_a(\hat {x}_1-0.5)$ for
$a(\hat {x}_1) = 1.34 + m_a(\hat {x}_1-0.5)$ for  $m_a = 1.8$ (solid),
$m_a = 1.8$ (solid),  $m_{a} = 0$ (dotted) and
$m_{a} = 0$ (dotted) and  $m_a = -1.8$ (dashed). The radius
$m_a = -1.8$ (dashed). The radius  $R$ varies following (4.1). For
$R$ varies following (4.1). For  $a_0=1.34$ and
$a_0=1.34$ and  $m_a=\pm 1.8$ the minimum attainable porosity is
$m_a=\pm 1.8$ the minimum attainable porosity is  $1-0.11{\rm \pi} \approx 0.66$ ((d); black dots).
$1-0.11{\rm \pi} \approx 0.66$ ((d); black dots).
We first consider  $R(\hat {x}_1) = R_0 + m_R(\hat {x}_1-0.5)$, where
$R(\hat {x}_1) = R_0 + m_R(\hat {x}_1-0.5)$, where  $R_0$ is the average obstacle radius (also the mid-point radius) and
$R_0$ is the average obstacle radius (also the mid-point radius) and  $m_R$ is the gradient (figure 9a,b). We take
$m_R$ is the gradient (figure 9a,b). We take  $R_0 = 0.36$ and
$R_0 = 0.36$ and  $m_R=0.14$ (increasing in
$m_R=0.14$ (increasing in  $\hat {x}_1$),
$\hat {x}_1$),  $m_R=0$ (uniform in
$m_R=0$ (uniform in  $\hat {x}_1$) or
$\hat {x}_1$) or  $m_R=-0.14$ (decreasing in
$m_R=-0.14$ (decreasing in  $\hat {x}_1$).
$\hat {x}_1$).
When varying  $R$ linearly, the sign of
$R$ linearly, the sign of  $m_R$ has a modest impact on the concentration distribution: for any uniform porosity,
$m_R$ has a modest impact on the concentration distribution: for any uniform porosity,  $m_R>0$ leads to a shallower gradient in
$m_R>0$ leads to a shallower gradient in  $C^{(0)}$ and a higher concentration at every point within the filter, including the outlet. Thus, for any uniform porosity,
$C^{(0)}$ and a higher concentration at every point within the filter, including the outlet. Thus, for any uniform porosity,  $m_R<0$ is always a more efficient filter than
$m_R<0$ is always a more efficient filter than  $m_R>0$.
$m_R>0$.
We next consider  $a(\hat {x}_1) = a_0 + m_a(\hat {x}_1-0.5)$, where
$a(\hat {x}_1) = a_0 + m_a(\hat {x}_1-0.5)$, where  $a_0$ is the average cell width (also the cell width at the mid-point) and
$a_0$ is the average cell width (also the cell width at the mid-point) and  $m_a$ is the gradient of
$m_a$ is the gradient of  $a$ over
$a$ over  $\hat {x}_1$ (figure 9c,d). We take
$\hat {x}_1$ (figure 9c,d). We take  $a_0 = 1.34$ and
$a_0 = 1.34$ and  $m_a=1.8$ (increasing in
$m_a=1.8$ (increasing in  $\hat {x}_1$),
$\hat {x}_1$),  $m_a=0$ (constant in
$m_a=0$ (constant in  $\hat {x}_1$) or
$\hat {x}_1$) or  $m_a=-1.8$ (decreasing in
$m_a=-1.8$ (decreasing in  $\hat {x}_1$). From (4.1) for fixed
$\hat {x}_1$). From (4.1) for fixed  $\phi$, it can be seen that
$\phi$, it can be seen that  $a \propto R^2$, thus, a decrease in
$a \propto R^2$, thus, a decrease in  $a$ must be mirrored by a decrease in
$a$ must be mirrored by a decrease in  $R$ to maintain a uniform
$R$ to maintain a uniform  $\phi$. Thus, we expect the same qualitative behaviour for a linear gradient in
$\phi$. Thus, we expect the same qualitative behaviour for a linear gradient in  $R$ (figure 9a,b) as for a linear gradient in
$R$ (figure 9a,b) as for a linear gradient in  $a$ (figure 9c,d). We find that
$a$ (figure 9c,d). We find that  $m_a<0$ leads to a more efficient filter for all
$m_a<0$ leads to a more efficient filter for all  $\phi$.
$\phi$.
Note that, for any  $\phi \in (1-0.11{\rm \pi},1)$ – that is, the range of porosities attainable for imposed linear gradients in both
$\phi \in (1-0.11{\rm \pi},1)$ – that is, the range of porosities attainable for imposed linear gradients in both  $R$ and
$R$ and  $a$ (see figure 9 caption) – prescribing
$a$ (see figure 9 caption) – prescribing  $a$ and taking
$a$ and taking  $m_a<0$ predicts most efficient filter considered here (comparing figures 9b and 9d). Similarly, for large
$m_a<0$ predicts most efficient filter considered here (comparing figures 9b and 9d). Similarly, for large  $\phi \gtrsim 0.725$ prescribing
$\phi \gtrsim 0.725$ prescribing  $a$ and taking
$a$ and taking  $m_a>0$ predicts the least efficient filter, whereas, for small
$m_a>0$ predicts the least efficient filter, whereas, for small  $\phi \lesssim 0.725$ prescribing
$\phi \lesssim 0.725$ prescribing  $R$ and taking
$R$ and taking  $m_R>0$ predicts the least efficient filter.
$m_R>0$ predicts the least efficient filter.
5. Conclusions
We have systematically derived a macroscopic model for flow, transport and sorption during steady flow in a two-dimensional heterogeneous and anisotropic porous medium using generalisations of standard homogenisation theory for slow variations in the size of periodic cells (Chapman & McBurnie Reference Chapman and McBurnie2011; Richardson & Chapman Reference Richardson and Chapman2011) and locally periodic microstructures (Bruna & Chapman Reference Bruna and Chapman2015; Dalwadi et al. Reference Dalwadi, Griffiths and Bruna2015). We derived a model valid for a heterogeneous porous medium comprising cells of varying size each containing multiple arbitrarily shaped obstacles. The heterogeneity originates from slowly varying obstacle size and/or obstacle spacing along the length of the porous medium; the latter also induces strong anisotropy within the problem. For the flow problem, we obtain Darcy's law with an anisotropic permeability tensor, and for the solute concentration problem we obtain an advection–diffusion–reaction equation with an anisotropic effective diffusivity tensor. The permeability, effective diffusivity and the removal term are functions of the porosity, obstacle spacing and a scale factor controlling the variation in obstacle size across the medium; any two of these are free choices which prescribe the third. In § 4 we consider a simple geometry comprising circular obstacles centred in rectangular cells. We determine the corresponding permeability and effective diffusivity numerically and show how these depend on the radius of the obstacles and the aspect ratio of the cells. This work illustrates and quantifies how the permeability and diffusivity of a porous medium depend not only on the porosity of the medium, but also on the microstructure of the medium.
Our homogenisation procedure allows for slowly varying changes to the cell surrounding each circle that comprises the filter. This means that the total area of each individual cell may differ between cells. This is a new aspect to homogenisation and we have carefully derived a transport theorem to account for how these microstructural changes affect the macroscale transport. Using this transport theorem we have shown that macroscale incompressibility is preserved (the divergence of the Darcy flux vanishes) and that this is independent of the individual cell size. The two degrees of microstructural freedom (varying obstacle size and spacing) enable us to consider a wide range of heterogeneities on the microscale, such as maintaining a uniform porosity while systematically varying the microstructure. These macroscale equations are computationally inexpensive to solve, allowing for optimisation of parameters through large sweeps, which would not be possible with DNS.
We have focused on a regime in which diffusion balances advection and removal at the macroscale and dominates advection and removal at the microscale (i.e.  $Pe=O(1)$,
$Pe=O(1)$,  $\epsilon {}Pe\ll 1$). Sub-limits involving weaker advection and/or removal may be taken directly in the final result without repeating the interim analysis. For scenarios with stronger advection (i.e.
$\epsilon {}Pe\ll 1$). Sub-limits involving weaker advection and/or removal may be taken directly in the final result without repeating the interim analysis. For scenarios with stronger advection (i.e.  $\epsilon {}Pe=O(1)$), as might be the case in many industrial filtration scenarios, hydrodynamic dispersion becomes important and new terms that are proportional to the product of velocity and concentration gradient will arise in the homogenised equations. Our analysis here lays the foundation for future work to incorporate dispersive effects.
$\epsilon {}Pe=O(1)$), as might be the case in many industrial filtration scenarios, hydrodynamic dispersion becomes important and new terms that are proportional to the product of velocity and concentration gradient will arise in the homogenised equations. Our analysis here lays the foundation for future work to incorporate dispersive effects.
The example geometry considered in § 4 is two-dimensional; a direct physical analogue would be a quasi-two-dimensional filter comprising solid circular pillars that are centred on a rectangular grid and sufficiently tall that boundary effects at the top and bottom walls can be neglected. This is a simple but appropriate model for non-woven fibrous filters, which form a major part of the filtration industry (e.g. those in air purifiers and vacuum cleaners) (Spychała & Starzyk Reference Spychała and Starzyk2015; Printsypar, Bruna & Griffiths Reference Printsypar, Bruna and Griffiths2019), magnetic separation filters composed of wire wool (Mariani et al. Reference Mariani, Fabbri, Negrini and Ribani2010) and microfluidic devices containing tall micropillars (Benítez et al. Reference Benítez2012; Wang et al. Reference Wang, Wu, Fine, Schmulen, Hu, Godin, Zhang and Liu2013). The strong anisotropy in the problem could be useful for filter design; it is achieved while maintaining the circular shape of the obstacles and the principal directions of the permeability and diffusivity tensors are fixed as the longitudinal and transverse directions. A deeper understanding of the impacts of microstructural heterogeneity and anisotropy is also relevant to many other areas of research, including hydrology and biology (e.g. O'Dea et al. Reference O'Dea, Nelson, El Haj, Waters and Byrne2015; Wang et al. Reference Wang, Liu, Zak and Lennartz2020).
We considered a simple model problem for a one-dimensional filter with chemical adsorption at steady state. Measuring efficiency as the amount of solute removed by the filter per unit time, we found that negative porosity gradients lead to a more efficient filter than positive porosity gradients or filters of uniform porosity. Further, for a fixed porosity, decreasing obstacle size or decreasing obstacle spacing lead to more efficient filters than their respective constant or increasing counterparts. For a given porosity, a linearly decreasing obstacle spacing leads to a more efficient filter than a linearly decreasing obstacle radius.
While we have defined efficiency to mean instantaneous performance, other factors are also relevant to efficiency. Factors such as manufacturing costs, filter lifetime and fluid flux output may also need to be considered. For example, if the coating on the solid obstacles were very expensive then we may wish to minimise the amount of surface area of the solid obstacles while maximising performance. Further, we assumed that the solid surface never saturates with solute. However, in practice, the number of active sites where the solute can attach to the solid will decrease as solute adsorbs, which may reduce the efficiency. This saturating effect may be mitigated by ensuring that there are active sites throughout the full length of the filter in order to maximise the chance a solute particle will come into contact with an active site. The simple one-dimensional filter model we considered only predicts initial or instantaneous filter efficiency and will therefore not predict the total amount of contaminant filtered out over the life span of a filter if properties were to change with time. However, the equations derived in this paper can readily be generalised to describe such a case. All of these additional considerations to filter design lead to multiple optimisation problems, requiring large parameter sweeps, for which a computationally inexpensive model, such as this, is vital.
In our analysis we have assumed that the solute particles are negligibly small; for particles that are not negligible in size relative to the smallest distances between adjacent obstacles (choke points), we would also need to consider the effects of choking of the filter due to particle build-up. Avoidance of such filter blockages requires sufficiently wide longitudinal connectivity. Hence, a filter comprising obstacles whose radii increase with depth is desirable, since such a gradient allows for more build-up of solute on the solid obstacles near the inlet without choking the filter. This scenario was considered in Dalwadi et al. (Reference Dalwadi, Bruna and Griffiths2016). However, in our case, we also have the possibility of varying the spacing between obstacles. This additional degree of freedom allows us to respect a positive gradient in the obstacle radii to mitigate the risks of blockages, while also having either a negative gradient in the porosity or obstacle spacing to enable more efficient filters.
We have validated our results against limiting cases and previous homogenisation results (cf. § 4.1); DNS for flow and transport in a broader range of relevant geometries would provide further validation and may lead to additional insight, and should be the subject of future work.
While it has been shown that the effective diffusivity for a porous medium with obstacles on a uniform square grid was qualitatively similar to a porous medium with obstacles on a uniform hexagonal grid for all porosities (Bruna & Chapman Reference Bruna and Chapman2015), we expect that the addition of anisotropy to the hexagonal problem, obtained by varying the longitudinal obstacle spacing, will cause the permeabilities and effective diffusivities to diverge from those determined here. For example, in certain limits, the hexagonal problem reduces to a series of longitudinal channels while in other limits, the hexagonal problem reduces to a series of transverse channels. Consequently in the latter limit, for the hexagonal structure, the longitudinal permeability and diffusivity must vanish, while for the rectangular structure the longitudinal permeability and diffusivity remain non-zero for all parameter combinations provided  $R<1/2$ – that is,
$R<1/2$ – that is,  ${\mathsf{K}}_{11}$ and
${\mathsf{K}}_{11}$ and  ${\mathsf{D}}_{11}$ only vanish when
${\mathsf{D}}_{11}$ only vanish when  $R=1/2$. In general, the hexagonal arrangement will mean that the longitudinal permeability will be more sensitive to longitudinal obstacle spacing than it is for obstacles in a rectangular structure. This is because with a hexagonal grid, altering the longitudinal spacing alters both the longitudinal and transverse distances between neighbouring obstacles, while for a rectangular grid, altering the longitudinal spacing does not alter the transverse distance between obstacles. This illustrates that, when anisotropy is introduced into a problem, the microstructure becomes more significant than for isotropic problems. Modelling the filter as a series of circles on a varying hexagonal grid will better describe granular materials and this is the focus of future work.
$R=1/2$. In general, the hexagonal arrangement will mean that the longitudinal permeability will be more sensitive to longitudinal obstacle spacing than it is for obstacles in a rectangular structure. This is because with a hexagonal grid, altering the longitudinal spacing alters both the longitudinal and transverse distances between neighbouring obstacles, while for a rectangular grid, altering the longitudinal spacing does not alter the transverse distance between obstacles. This illustrates that, when anisotropy is introduced into a problem, the microstructure becomes more significant than for isotropic problems. Modelling the filter as a series of circles on a varying hexagonal grid will better describe granular materials and this is the focus of future work.
It would be straightforward to generalise our approach to a three-dimensional porous medium comprising spherical obstacles centred on a cuboid grid that is homogeneous in two directions, but again allowing for arbitrary variation of both obstacle radius and obstacle spacing in the longitudinal direction. We would expect the results to be qualitatively similar to the two-dimensional problem considered here, except that the connectivity would not vanish when obstacles touch. This feature would then mean that we have non-zero permeability and diffusivity in all directions throughout the entire parameter space.
A final point to note is that the spacing between obstacles may change when a filter is subject to an effective stress. By coupling the model presented here to a law that relates the spacing of the obstacles to the strain of the porous medium, we can derive homogenised equations for a filter undergoing longitudinal deformation.
In summary, the results presented in this manuscript form a comprehensive framework for describing the macroscropic transport and adsorption properties of a heterogeneous porous medium. The model can be used to answer questions about the filtration performance of such porous media and can be readily generalised to more complicated scenarios than the specific examples considered here.
Acknowledgements
M.P.D. would like to acknowledge helpful discussions with Professor S. J. Chapman.
Funding
This work was supported by the Royal Society (L.C.A., grant reference number ICA $\backslash$R1
$\backslash$R1 $\backslash$180098 and I.M.G., University Research Fellowship with grant reference number URF
$\backslash$180098 and I.M.G., University Research Fellowship with grant reference number URF $\backslash$R
$\backslash$R $\backslash$191008); the European Research Council (ERC) under the European Union's Horizon 2020 Programme (L.C.A., C.W.M. and S.P., grant number 805469); and IIT Gandhinagar (S.P., Research Initiation Grant (RIG)).
$\backslash$191008); the European Research Council (ERC) under the European Union's Horizon 2020 Programme (L.C.A., C.W.M. and S.P., grant number 805469); and IIT Gandhinagar (S.P., Research Initiation Grant (RIG)).
Declaration of interests
The authors report no conflict of interest.
Data availability statement
The data that support the findings of this study are openly available in GitHub at https://github.com/satyajitpramanik/homogenization-jfm2021.
Appendix A. Transport theorem
A.1. Generalised transport theorem
Firstly, we present a generalised form of the transport theorem which allows us to interchange  $\boldsymbol {\nabla }_x$ with integration over a cell of arbitrary geometry. Consider the region
$\boldsymbol {\nabla }_x$ with integration over a cell of arbitrary geometry. Consider the region  $\alpha$ bounded by the surface
$\alpha$ bounded by the surface  $\partial {\alpha }$, and suppose that this region moves and/or deforms with time
$\partial {\alpha }$, and suppose that this region moves and/or deforms with time  $t$. Denote the position of points on
$t$. Denote the position of points on  $\partial {\alpha }(t)$ by
$\partial {\alpha }(t)$ by  ${\boldsymbol {y}}^b(t)$. The Reynolds transport theorem states that
${\boldsymbol {y}}^b(t)$. The Reynolds transport theorem states that
 \begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\int_{\alpha(t)}\,\boldsymbol{\zeta}\, \mathrm{d}V =\int_{\alpha(t)}\,\frac{\partial{\boldsymbol{\zeta}}}{\partial{t}}\, \mathrm{d}V +\int_{\partial{\alpha}(t)}\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{t}}\boldsymbol{\cdot}\boldsymbol{n}\right)\boldsymbol{\zeta}\, \mathrm{d}S, \end{equation}
\begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\int_{\alpha(t)}\,\boldsymbol{\zeta}\, \mathrm{d}V =\int_{\alpha(t)}\,\frac{\partial{\boldsymbol{\zeta}}}{\partial{t}}\, \mathrm{d}V +\int_{\partial{\alpha}(t)}\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{t}}\boldsymbol{\cdot}\boldsymbol{n}\right)\boldsymbol{\zeta}\, \mathrm{d}S, \end{equation}
for an arbitrary vector field  $\boldsymbol {\zeta }(\hat {\boldsymbol {x}},t)$, where
$\boldsymbol {\zeta }(\hat {\boldsymbol {x}},t)$, where  $\mathrm {d}V$ signifies a volume integral,
$\mathrm {d}V$ signifies a volume integral,  $\mathrm {d}S$ signifies a surface integral,
$\mathrm {d}S$ signifies a surface integral,  $\boldsymbol {n}$ is the outward normal to
$\boldsymbol {n}$ is the outward normal to  $\partial {\alpha }$ and the time derivative
$\partial {\alpha }$ and the time derivative  $\partial {\boldsymbol {y}^b}/\partial {t}$ can be identified as the local velocity of
$\partial {\boldsymbol {y}^b}/\partial {t}$ can be identified as the local velocity of  $\partial {\alpha }(t)$.
$\partial {\alpha }(t)$.
In (A1),  $t$ plays the role of an arbitrary scalar parameter. In other words, (A1) remains valid if we suppose that the region moves and/or deforms according to some other scalar parameter
$t$ plays the role of an arbitrary scalar parameter. In other words, (A1) remains valid if we suppose that the region moves and/or deforms according to some other scalar parameter  $\xi$, in which case we have that
$\xi$, in which case we have that
 \begin{equation} \frac{\mathrm{d}}{\mathrm{d}\xi}\int_{\beta(\xi)}\!\boldsymbol{z}\, \mathrm{d}V =\int_{\beta(\xi)}\,\frac{\partial{\boldsymbol{z}}}{\partial{\xi}}\, \mathrm{d}V +\int_{\partial{\beta}(\xi)}\!\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{\xi}}\boldsymbol{\cdot}\boldsymbol{n}\right)\boldsymbol{z}\, \mathrm{d}S, \end{equation}
\begin{equation} \frac{\mathrm{d}}{\mathrm{d}\xi}\int_{\beta(\xi)}\!\boldsymbol{z}\, \mathrm{d}V =\int_{\beta(\xi)}\,\frac{\partial{\boldsymbol{z}}}{\partial{\xi}}\, \mathrm{d}V +\int_{\partial{\beta}(\xi)}\!\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{\xi}}\boldsymbol{\cdot}\boldsymbol{n}\right)\boldsymbol{z}\, \mathrm{d}S, \end{equation}
for an arbitrary vector field  $\boldsymbol {z}(\hat {\boldsymbol {x}}, \xi )$, and where the domain
$\boldsymbol {z}(\hat {\boldsymbol {x}}, \xi )$, and where the domain  $\beta$ is a function of
$\beta$ is a function of  $\xi$. Note that the derivative
$\xi$. Note that the derivative  $\partial {\boldsymbol {y}^b}/\partial {\xi }$ can no longer be identified as a velocity in the traditional sense.
$\partial {\boldsymbol {y}^b}/\partial {\xi }$ can no longer be identified as a velocity in the traditional sense.
Now, consider several independent parameters as a vector  $\boldsymbol {\xi }=\xi _i{\boldsymbol {e}}_i$, where we use the summation convention and
$\boldsymbol {\xi }=\xi _i{\boldsymbol {e}}_i$, where we use the summation convention and  $\boldsymbol {e}_i$ is the unit normal in the
$\boldsymbol {e}_i$ is the unit normal in the  $i$th direction. The corresponding divergence with respect to this vector is then
$i$th direction. The corresponding divergence with respect to this vector is then
 \begin{equation} \boldsymbol{\nabla}_{\xi} \boldsymbol{\cdot}\int_{\beta(\boldsymbol{\xi})}\!\boldsymbol{z}\, \mathrm{d}V=\left({\boldsymbol{e}}_i\frac{\partial}{\partial{\xi_i}}\right)\boldsymbol{\cdot}\int_{\beta(\boldsymbol{\xi})}\!(z_j{\boldsymbol{e}}_j)\, \mathrm{d}V =\frac{\partial}{\partial{\xi_i}}\int_{\beta(\boldsymbol{\xi})}\,z_i\, \mathrm{d}V. \end{equation}
\begin{equation} \boldsymbol{\nabla}_{\xi} \boldsymbol{\cdot}\int_{\beta(\boldsymbol{\xi})}\!\boldsymbol{z}\, \mathrm{d}V=\left({\boldsymbol{e}}_i\frac{\partial}{\partial{\xi_i}}\right)\boldsymbol{\cdot}\int_{\beta(\boldsymbol{\xi})}\!(z_j{\boldsymbol{e}}_j)\, \mathrm{d}V =\frac{\partial}{\partial{\xi_i}}\int_{\beta(\boldsymbol{\xi})}\,z_i\, \mathrm{d}V. \end{equation}Equation (A2) provides the following expression for the right-hand side of (A3):
 \begin{equation} \frac{\partial}{\partial{\xi_i}}\int_{\beta(\boldsymbol{\xi})}\,z_i\, \mathrm{d}V =\int_{\beta(\boldsymbol{\xi})}\,\frac{\partial{z_i}}{\partial{\xi_i}}\, \mathrm{d}V +\int_{\partial{\beta}(\boldsymbol{\xi})}\!\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{\xi_i}}\boldsymbol{\cdot}\boldsymbol{n}\right)z_i\, \mathrm{d}S. \end{equation}
\begin{equation} \frac{\partial}{\partial{\xi_i}}\int_{\beta(\boldsymbol{\xi})}\,z_i\, \mathrm{d}V =\int_{\beta(\boldsymbol{\xi})}\,\frac{\partial{z_i}}{\partial{\xi_i}}\, \mathrm{d}V +\int_{\partial{\beta}(\boldsymbol{\xi})}\!\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{\xi_i}}\boldsymbol{\cdot}\boldsymbol{n}\right)z_i\, \mathrm{d}S. \end{equation}Returning to vector notation, we can re-write this result as
 \begin{equation} {\boldsymbol{\nabla}}_{\xi} \boldsymbol{\cdot}\int_{\beta(\boldsymbol{\xi})}\,\boldsymbol{z}\, \mathrm{d}V=\int_{\beta(\boldsymbol{\xi})}\,{\boldsymbol{\nabla}}_\xi\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}V +\int_{\partial{\beta}(\boldsymbol{\xi})}\!\boldsymbol{n}\boldsymbol{\cdot}\boldsymbol{\mathsf{G}}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}S, \end{equation}
\begin{equation} {\boldsymbol{\nabla}}_{\xi} \boldsymbol{\cdot}\int_{\beta(\boldsymbol{\xi})}\,\boldsymbol{z}\, \mathrm{d}V=\int_{\beta(\boldsymbol{\xi})}\,{\boldsymbol{\nabla}}_\xi\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}V +\int_{\partial{\beta}(\boldsymbol{\xi})}\!\boldsymbol{n}\boldsymbol{\cdot}\boldsymbol{\mathsf{G}}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}S, \end{equation}where
 \begin{equation} \boldsymbol{\mathsf{G}} =\frac{\partial{y^b_i}}{\partial{\xi_j}}\,{\boldsymbol{e}}_i{\boldsymbol{e}}_j=\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{\boldsymbol{\xi}}}\right)^\intercal=({\boldsymbol{\nabla}}_\xi\otimes\boldsymbol{y}^b)^\intercal, \end{equation}
\begin{equation} \boldsymbol{\mathsf{G}} =\frac{\partial{y^b_i}}{\partial{\xi_j}}\,{\boldsymbol{e}}_i{\boldsymbol{e}}_j=\left(\frac{\partial{\boldsymbol{y}^b}}{\partial{\boldsymbol{\xi}}}\right)^\intercal=({\boldsymbol{\nabla}}_\xi\otimes\boldsymbol{y}^b)^\intercal, \end{equation}
is the Jacobian of the dependence of  $\partial {\beta }$ on
$\partial {\beta }$ on  $\boldsymbol {\xi }$. Thus, (A5) defines the generalised transport theorem.
$\boldsymbol {\xi }$. Thus, (A5) defines the generalised transport theorem.
A.2. Relationship to the macroscale perturbation to the normal
Applying the generalised Reynolds transport theorem (A5) to a vector field  $\boldsymbol {z}(\boldsymbol {x},\boldsymbol {y})$, over the periodic cell
$\boldsymbol {z}(\boldsymbol {x},\boldsymbol {y})$, over the periodic cell  $\omega _f$, yields the following expression:
$\omega _f$, yields the following expression:
 \begin{equation} {\boldsymbol{\nabla}}_x \boldsymbol{\cdot}\int_{\omega_f(x_1)}\!\boldsymbol{z}\, \mathrm{d}S_y=\int_{\omega_f(x_1)}\,\boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}S_y +\int_{\partial{\omega_s(x_1)}}\!\boldsymbol{n}^y\boldsymbol{\cdot}\boldsymbol{G}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y +\int_{\partial{\omega(x_1)}}\!\boldsymbol{n}^\square\boldsymbol{\cdot}\boldsymbol{G}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y, \end{equation}
\begin{equation} {\boldsymbol{\nabla}}_x \boldsymbol{\cdot}\int_{\omega_f(x_1)}\!\boldsymbol{z}\, \mathrm{d}S_y=\int_{\omega_f(x_1)}\,\boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}S_y +\int_{\partial{\omega_s(x_1)}}\!\boldsymbol{n}^y\boldsymbol{\cdot}\boldsymbol{G}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y +\int_{\partial{\omega(x_1)}}\!\boldsymbol{n}^\square\boldsymbol{\cdot}\boldsymbol{G}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y, \end{equation}
where  $\boldsymbol {n}^\square$ is defined in relation to (3.34).
$\boldsymbol {n}^\square$ is defined in relation to (3.34).
From periodicity, the final term on the right-hand side of (A6) vanishes, i.e.
 \begin{equation} \int_{\partial{\omega(x_1)}}\!\boldsymbol{n}^\square\boldsymbol{\cdot}\boldsymbol{G}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y = 0. \end{equation}
\begin{equation} \int_{\partial{\omega(x_1)}}\!\boldsymbol{n}^\square\boldsymbol{\cdot}\boldsymbol{G}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y = 0. \end{equation}
Using the definition of  $\boldsymbol {n}^y$ from (3.25c) and the definition of
$\boldsymbol {n}^y$ from (3.25c) and the definition of  $\boldsymbol {G}$ from (A5b), we obtain
$\boldsymbol {G}$ from (A5b), we obtain
 \begin{equation} \boldsymbol{n}^y\boldsymbol{\cdot}\boldsymbol{G} = \frac{\displaystyle\frac{\partial f_s}{\partial y_i} \frac{\partial y_i^b}{\partial x_j}}{\displaystyle|\boldsymbol{\nabla}_y\, f_s|}\boldsymbol{e}_j, \end{equation}
\begin{equation} \boldsymbol{n}^y\boldsymbol{\cdot}\boldsymbol{G} = \frac{\displaystyle\frac{\partial f_s}{\partial y_i} \frac{\partial y_i^b}{\partial x_j}}{\displaystyle|\boldsymbol{\nabla}_y\, f_s|}\boldsymbol{e}_j, \end{equation}
using the summation convention and evaluated on  $\boldsymbol {y} = \boldsymbol {y}^b(\boldsymbol {x})$, which is defined implicitly through
$\boldsymbol {y} = \boldsymbol {y}^b(\boldsymbol {x})$, which is defined implicitly through
 \begin{equation} f_s(\boldsymbol{x},\boldsymbol{y}^b(\boldsymbol{x})) = 0. \end{equation}
\begin{equation} f_s(\boldsymbol{x},\boldsymbol{y}^b(\boldsymbol{x})) = 0. \end{equation} Since  $\boldsymbol {x} = x_j \boldsymbol {e}_j$ is a parameter in each unit cell, differentiating (A9) with respect to
$\boldsymbol {x} = x_j \boldsymbol {e}_j$ is a parameter in each unit cell, differentiating (A9) with respect to  $x_j$ yields the relationship
$x_j$ yields the relationship
 \begin{equation} \frac{\partial f_s}{\partial x_j}+\frac{\partial f_s}{\partial y_i}\frac{\partial y_i^b}{\partial x_j} = 0, \end{equation}
\begin{equation} \frac{\partial f_s}{\partial x_j}+\frac{\partial f_s}{\partial y_i}\frac{\partial y_i^b}{\partial x_j} = 0, \end{equation}
evaluated on  $\boldsymbol {y} = \boldsymbol {y}^b(\boldsymbol {x})$. Substituting the relationship (A10) into (A8) implies that
$\boldsymbol {y} = \boldsymbol {y}^b(\boldsymbol {x})$. Substituting the relationship (A10) into (A8) implies that
 \begin{equation} \boldsymbol{n}^y\boldsymbol{\cdot}\boldsymbol{G} ={-}\frac{\boldsymbol{\nabla}_x\, f_s}{|\boldsymbol{\nabla}_y\, f_s|} \equiv{-} \boldsymbol{N}, \end{equation}
\begin{equation} \boldsymbol{n}^y\boldsymbol{\cdot}\boldsymbol{G} ={-}\frac{\boldsymbol{\nabla}_x\, f_s}{|\boldsymbol{\nabla}_y\, f_s|} \equiv{-} \boldsymbol{N}, \end{equation}
using the definition of  $\boldsymbol {N}$ in (3.25e). Thus, the transport theorem (A6) becomes
$\boldsymbol {N}$ in (3.25e). Thus, the transport theorem (A6) becomes
 \begin{equation} \int_{\omega_f} \! \boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}S_y = \boldsymbol{\nabla}_x\boldsymbol{\cdot}\int_{\omega_f} \! \boldsymbol{z}\, \mathrm{d}S_y + \int_{\partial\omega_s} \! \boldsymbol{N}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y. \end{equation}
\begin{equation} \int_{\omega_f} \! \boldsymbol{\nabla}_x\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}S_y = \boldsymbol{\nabla}_x\boldsymbol{\cdot}\int_{\omega_f} \! \boldsymbol{z}\, \mathrm{d}S_y + \int_{\partial\omega_s} \! \boldsymbol{N}\boldsymbol{\cdot}\boldsymbol{z}\, \mathrm{d}s_y. \end{equation}Appendix B. Non-monotonicity of  ${{\mathsf{D}}}_{\textbf {11}}$
${{\mathsf{D}}}_{\textbf {11}}$

In this appendix, we show the diffusivity tensor  $\boldsymbol{\mathsf{D}}$ (figure 10a–d) and examine the non-monotonicity of the longitudinal diffusivity
$\boldsymbol{\mathsf{D}}$ (figure 10a–d) and examine the non-monotonicity of the longitudinal diffusivity  ${{\mathsf{D}}}_{11}$ for fixed
${{\mathsf{D}}}_{11}$ for fixed  $R$ as
$R$ as  $\phi$ varies. We consider the minimum longitudinal diffusivity
$\phi$ varies. We consider the minimum longitudinal diffusivity  ${{\mathsf{D}}}_{11}^\star$ and the unique value of
${{\mathsf{D}}}_{11}^\star$ and the unique value of  $\phi ^\star$ to which it corresponds (figure 10e). Each value
$\phi ^\star$ to which it corresponds (figure 10e). Each value  $\phi ^\star$ corresponds to a particular pair
$\phi ^\star$ corresponds to a particular pair  $a^\star$ and
$a^\star$ and  $R^\star$ (figure 10f). Note that
$R^\star$ (figure 10f). Note that  $a^\star$ is approximately related to
$a^\star$ is approximately related to  $R^\star$ via
$R^\star$ via  $a^\star =2R^\star \sqrt {{\rm \pi} }$ (figure 10(f), blue dot-dashed line). This linear relationship is a good fit for small
$a^\star =2R^\star \sqrt {{\rm \pi} }$ (figure 10(f), blue dot-dashed line). This linear relationship is a good fit for small  $R^\star$, but slightly overestimates the true value of
$R^\star$, but slightly overestimates the true value of  $a^\star$ for larger values of
$a^\star$ for larger values of  $R^\star$.
$R^\star$.

Figure 10. (a,c) Effective diffusivities  ${{\mathsf{D}}}_{11}$ and
${{\mathsf{D}}}_{11}$ and  ${{\mathsf{D}}}_{22}$, respectively, against
${{\mathsf{D}}}_{22}$, respectively, against  $\phi$ for fixed values of
$\phi$ for fixed values of  $R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with
$R\in \{0.1, 0.2, 0.3, 0.4, 0.49\}$, with  $a$ varying according to (4.1). (b,d) Effective diffusivities
$a$ varying according to (4.1). (b,d) Effective diffusivities  ${{\mathsf{D}}}_{11}$ and
${{\mathsf{D}}}_{11}$ and  ${{\mathsf{D}}}_{22}$, respectively, against
${{\mathsf{D}}}_{22}$, respectively, against  $R$ for fixed values of
$R$ for fixed values of  $\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with
$\phi \in \{0.65, 0.7, 0.8, 0.9, 0.95\}$, with  $a$ varying according to (4.1). For a given value of
$a$ varying according to (4.1). For a given value of  $R$, the minimum porosity
$R$, the minimum porosity  $\phi _{min}(R)$ is given by (4.1) with
$\phi _{min}(R)$ is given by (4.1) with  $a=2R$. Note that
$a=2R$. Note that  ${{\mathsf{D}}}_{11}$ is non-zero at
${{\mathsf{D}}}_{11}$ is non-zero at  $\phi _{min}(R)$ for all values of
$\phi _{min}(R)$ for all values of  $\phi$ (dot-dashed curve, a,b), whereas
$\phi$ (dot-dashed curve, a,b), whereas  ${{\mathsf{D}}}_{22}$ vanishes at the corresponding
${{\mathsf{D}}}_{22}$ vanishes at the corresponding  $\phi _{min}$. Both
$\phi _{min}$. Both  ${{\mathsf{D}}}_{11}$ and
${{\mathsf{D}}}_{11}$ and  ${{\mathsf{D}}}_{22}$ are as defined in (3.45a) and calculated using COMSOL Multiphysics. Both
${{\mathsf{D}}}_{22}$ are as defined in (3.45a) and calculated using COMSOL Multiphysics. Both  ${{\mathsf{D}}}_{11}$ and
${{\mathsf{D}}}_{11}$ and  ${{\mathsf{D}}}_{22}$ tend to 1 as
${{\mathsf{D}}}_{22}$ tend to 1 as  $\phi \to 1$, which corresponds to the limit of free-space diffusion. The effective diffusivity is isotropic when
$\phi \to 1$, which corresponds to the limit of free-space diffusion. The effective diffusivity is isotropic when  $a=1$ (solid black curves, a–d), in agreement with the results presented in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015). (e) The minimum longitudinal diffusivity
$a=1$ (solid black curves, a–d), in agreement with the results presented in Dalwadi et al. (Reference Dalwadi, Griffiths and Bruna2015). (e) The minimum longitudinal diffusivity  ${{\mathsf{D}}}_{11}={{\mathsf{D}}}_{11}^{\star }$ for each value of
${{\mathsf{D}}}_{11}={{\mathsf{D}}}_{11}^{\star }$ for each value of  $R$ in figure 6(a) against the corresponding porosity
$R$ in figure 6(a) against the corresponding porosity  $\phi =\phi ^{\star }$ and (f) the corresponding value of
$\phi =\phi ^{\star }$ and (f) the corresponding value of  $a=a^\star$ against
$a=a^\star$ against  $R^\star$. The latter is well predicted by the line
$R^\star$. The latter is well predicted by the line  $a^\star = 2 R^\star \sqrt {{\rm \pi} }$ (blue dot-dashed line) for small
$a^\star = 2 R^\star \sqrt {{\rm \pi} }$ (blue dot-dashed line) for small  $R^\star$, becoming non-monotonic near
$R^\star$, becoming non-monotonic near  $R^\star =0.5$.
$R^\star =0.5$.





















































































































































































