


1. Introduction: What can linguistics do?
One might legitimately wonder what the study of language could tell us about the fascinating topic of time in human cognition, since language is conventional behavior, and as such does not necessarily reveal the speaker’s cognitive processes as she speaks. The short answer to this question is that language tells us what things mean. So, for example, if someone gestures from left to right in such a way that the space farther to her right indicates later times, does that mean that she thinks of future times as being to her right, or that later times are to the right of earlier times, or just that later and later times are arranged on a line farther and farther from the starting point (cf. Casasanto & Jasmin, Reference Casasanto and Jasmin2012)? Beyond saying that the co-speech gesture in context is a spatial representation of temporal phenomena, the meaning of the gesture – the relation of elements to other elements – has to be specified. In Figure 1, counting from left to right, we can think of ‘dot 3’ as being to the right of ‘dot 2’ or in front of ‘dot 2’ or next to ‘dot 2’. In a gesture that distinguishes positions in a line, the analyst has to decide which relation is pertinent to the temporal meaning.

Fig. 1. A row of dots.
Linguists can look at conventional expressions that people use to talk about temporal phenomena in spatial terms and ask about their semantic structure. The expression in (1) is a way of remembering to set your clock back in the fall, and forward in the spring for changes between standard and daylight savings time. Ahead and back in (1) can be explained relative to the structure of a clock.
-
(1) Spring ahead; fall back.
We can use the word forward to talk about setting a clock because the hands move forward. This is a general idea that if something is moving it is moving forward unless some other direction is specified. So to set a clock forward is to advance the hands in the direction they normally go. Ahead is another word that can be used to talk about this same space/motion concept: If A is ahead of B, A is more advanced than B on a Path of motion. Example (1) takes advantage of the fact that when people move deliberately, they typically move forward, so it is natural to associate spring, in the meaning ‘jump’, with the word ahead, and you can thus remember to set your clock forward/ahead in the spring. Likewise, unintended motion is easily associated in the mind with motion back, so the word fall in its ‘unintended motion’ meaning can be associated with the word back to help us remember to set our clocks back in the fall. And setting a clock back means ‘setting it for an earlier time’ because motion in the opposite direction to forward motion can be thought of as going back, and this idea is applied to the motion of the hands of the clock as in the case of ahead/forward. The virtue of this analysis is that it uses facts about (the English) language and the world it refers to in order to make sense of how people talk.
At this point there is something that has to be made explicit. When I say that speakers talk about temporal phenomena in spatial terms, I do not mean that the spatial concepts are understood independently of temporal experience (Engberg-Pedersen, Reference Engberg-Pedersen, Allwood and Gärdenfors1999), and I am not talking about (separate) domains of space and time. Whenever people experience a spatial phenomenon, the experience has a temporal dimension. This is especially true in the case of motion, which is definable in terms of an entity changing positions over time. So when people talk about time in terms of space, the spatial concepts often have a temporal dimension; e.g., forward in forward motion. When people talk about ‘time in terms of space’, a temporal concept that does not itself have a spatial dimension, like ‘getting later’, is elaborated in a spatial scenario, which may also involve time.
Coming back to the specifics of forward and back in time, the above story about setting clocks is inferentially consistent with other aspects of how English speakers systematically talk about temporal phenomena in spatial terms. The examples in (2) show how a future time can be talked about as ahead of the present, and a past time can be said to be in back.
-
(2)
-
a. We will make a decision as more information becomes available in the weeks ahead.
-
b. Back in 1967, San Francisco was a hippie Mecca.
-
Eleven o’clock is a later time than 10 o’clock when we set our watches ahead, and the future is later than the present in (2a). And the analogous relations hold regarding back, so examples (1) and (2) are inferentially consistent with each other. The examples in (2) represent a systematic and pervasive pattern in English. This paper will describe this pattern and others like it in English and other languages, and try to decide what this kind of linguistic evidence has to do with how people conceptualize spatial and temporal phenomena. I summarize and build upon previously published research, and also present new findings.
The paper is organized as follows: Section 2 presents some of the basics on space–motion metaphors of time in conceptual metaphor theory. Section 3 discusses deixis and frames of reference. Section 4 is about the experiential bases of conceptual metaphors. Section 5 focuses on in-front/behind relations in deictically neutral expressions in which in-front signifies ‘earlier’ and behind signifies ‘later’. Section 6 tries to discover what is spatial and what is temporal in space–motion metaphors of time. Section 7 is about generic structure. Section 8 is about generic structure that has to do with perspective. Section 9 is an inventory of the primary metaphors (in the sense of Grady, Reference Grady1997) involved in the analysis. Section 10 focuses on the significance of direction in temporal metaphor. Section 11 offers conclusions.
2. Metaphorical motion and the perspective of Now
This paper analyzes linguistic data using the theory of conceptual metaphor (Dancygier & Sweetser, Reference Dancygier and Sweetser2014; Lakoff & Johnson, Reference Lakoff and Johnson1999).
A metaphor comprises a mapping between two domains of experience, source and target, the former providing a basis for understanding the later (Lakoff & Johnson Reference Lakoff and Johnson1980). Their co-conception produces a conceptual blend (Fauconnier & Turner Reference Fauconnier and Turner2002) that – despite being imaginative – may be very real as an object of thought and basis for action. (Langacker, Reference Langacker, Filipović and Jaszczolt2012) [A mapping is a correspondence or counterpart relation between concepts.]
We begin with data that involve the moment of speaking as a Ground (anchor or reference point) relative to which a Time is determined as Figure. Such a construal is sometimes called deictic time (Núñez & Cooperrider, Reference Núñez and Cooperrider2013; Sinha & Bernárdez, 2015). In general, a Figure is any entity (i.e., anything at all: spatial or temporal) whose status is determined relative to some other entity, which is the Ground (Talmy, Reference Talmy2000, p. 184). This paper is about how Grounds are used in determining the status (spatial, temporal) of Figures. The data are mostly from English, with appeal to other languages where appropriate.
Two much-studied temporal metaphors (‘motion metaphors of time’) are Moving Ego and Moving Time (Clark, Reference Clark and Moore1973). Moving Ego is exemplified in (2) above. Technically, the examples are metaphorical expressions, and the expressions are hypothesized to be structured by conceptual metaphors. A conceptual metaphor consists of conceptual mappings from a source frame to a target frame – I speak of frames instead of domains, a practice which is becoming more common in discourse on conceptual metaphor (cf. Dancygier & Sweetser, Reference Dancygier and Sweetser2014). This paper is limited to cases in which the source frame has to do with space or motion and the target frame has to do with time, and the relation (mapping) between the source-frame and target-frame concept is motivated by a correlation in experience. (See Grady Reference Grady, Gibbs and Steen1999, and Section 4.)
A frame (Fillmore, Reference Fillmore1985) is “a chunk of knowledge structure” (Dancygier & Sweetser, Reference Dancygier and Sweetser2014, p. 17) relative to which something is understood. For example, the English speaker’s knowledge of what a week is – that it has seven successive days, that Saturday and Sunday constitute the weekend, etc. – is the frame relative to which we understand the meanings of weekday names like Tuesday (Fillmore & Baker, Reference Fillmore, Baker, Heine and Narrog2010).
The source frame of Moving Ego is motion. Footnote 1 In this frame a Mover moves relative to a Location. The names of frames are given in small capitals, and the names of the semantic roles (aka elements) in the frame have their first letter capitalized. The target frame is ego-centered time in which Ego experiences the Present, remembers the Past, and expects the Future. In the Moving Ego metaphor, experience of time is depicted in terms of Ego moving relative to one or more Locations. Ego is defined as the real or imagined person who is having an experience of space or time in the examples. In the metaphor, Locations that are more advanced on Ego’s Path correspond to later Times. A Time (count noun) as a semantic role is defined as when an event could happen or a state could obtain.
Moving Ego appears in many languages around the world. Below it is exemplified for Japanese and Wolof (West Africa).
-
(3) Japanese
Kurisumasu wa zutto saki da
Christmas top far ahead cop
‘Christmas is far ahead.’ (i.e., in the future) (Hirose, Reference Hirose2013) Footnote 2
-
(4) Wolof
Li ci gannaaw, xam nga paase nañ
rel locprep back know perf.2 go.beyond perf.1.pl
ko. Léegi ñungi dem ci kanam.
3.obj now 1.pl:prsntv go locprep front
‘That which is in back, you know we’ve passed it. Now
we’re going ahead.’ (i.e., the past is behind us and now we’re moving into the future.) (s MDJ, Ba:109)
A variant of Moving Ego portrays the Figure as ‘beyond the Ground’ relative to the point of view of Ego, who is metaphorically moving toward the future. An example is given here.
-
(5) I never go to bed beyond/past midnight.
In (5), the Figure (when I never go to bed) is metaphorically beyond the Ground (midnight) relative to a perspective which is fictively situated earlier than midnight. This is analogous to a translation relative frame of reference in the typology of Levinson (Reference Levinson2003). There is a brief description of this frame of reference in Section 10. (Also see Tenbrink, Reference Tenbrink2011.) The structure of (5) is different from other types of Moving Ego examples because the Figure does not move relative to the Ground. This configuration is mentioned here in the interest of giving a complete inventory, but I will not have much to say about it in this paper.
Another motion metaphor of time – Moving Time – is exemplified in (6).
-
(6)
-
a. Friday is coming.
-
b. Friday is here.
-
c. Friday has passed.
-
In this metaphor, Times are depicted as entities/objects that move relative to Ego. Times that are approaching Ego are in the Future, Times that are passing Ego are in the Present, and Times that have passed Ego are in the Past. Since the type of example in (3) involves Ego’s implicit present moment, this version of Moving Time is called Ego-centered Moving Time. The reason for this terminology will be further explained in Section 3.1 below. The fact that there is a large body of linguistic expressions that are inferentially consistent with each other in many languages is evidence that we are indeed looking at a conceptual phenomenon and not just a collection of linguistic facts. Next is an example from Japanese.
-
(7) Japanese (Ego-centered Moving Time)
Kurisumasu ga tikaduite-kita
Christmas nom approach-come:cont
‘Christmas is coming near (i.e., approaching).’ (Hirose, Reference Hirose2013)
Moving Ego and Moving Time are quite widespread cross-linguistically. Footnote 3 There is also a fair amount of experimental evidence that Moving Ego and Moving Time are psychologically real for English speakers. See, for example, Boroditsky and Ramscar (Reference Boroditsky and Ramscar2002), Gentner, Imai, and Boroditsky (Reference Gentner, Imai and Boroditsky2002), and McGlone and Harding (Reference McGlone and Harding1998).
3. Imagination-oriented deixis and frames of reference
3.1. deictic expressions
The observation that Moving Ego and Ego-centered Moving Time expressions are canonically deictic plays a central role in this paper. A discussion of temporal deixis will lay the groundwork for further discussion. One temporal issue people care about is the question of when things happen. The commonness of tense systems in languages attests to the importance of this question. Tense systems are essentially deictic. Deixis (adjective: deictic) is defined as a built-in dependence of a morpheme, word, or phrase on its situation of utterance for its meaning and particularly for its reference. For example, now is a deictic word in that it refers to the time when it is uttered. This subsection explains how Moving Ego and Ego-centered Moving Time expressions are canonically deictic. The next subsection will examine a contrasting kind of expression that is not deictic.
The structure of Moving Ego and Ego-centered Moving Time expressions is such that the simplest way to understand them is as deictic expressions. For example, (8a–8b) mean that Christmas is expected soon relative to the time of utterance. The reader will of course imagine the examples in a context in which they would be felicitous. It is in such a context that they are claimed to be deictic.
-
(8)
-
a. We are approaching Christmas.
-
b. Christmas is approaching.
-
In order to understand past-tense versions of these sentences, as in (9), it is necessary to imagine someone in the past relative to whom Christmas was imminent. This illustrates the claim that Moving Ego and Ego-centered Moving Time sentences canonically express a relationship between a time (such as Christmas), and the ‘Now’ of a real or imagined person (‘Ego’).
-
(9)
-
a. We were approaching Christmas.
-
b. Christmas was coming.
-
The sentences in (9) are examples of what Karl Bühler (1990 [1934], p. 140) has called Deixis am Phantasma or “imagination-oriented deixis”. Such sentences are not interpreted relative to the ‘here and now’ of their utterance. Rather, they are understood relative to an imaginary ‘here and now’, but the same principles of interpretation apply whether the situation of utterance is real or imagined. This phenomenon of imagination-oriented temporal deixis has been called transferring a temporal deictic element to ‘another center’ (Fillmore, Reference Fillmore, Jarvella and Klein1982, pp. 38–39) or shifted deictic center, and transposed indexical ground or decentering (Hanks, Reference Hanks1990; Haviland, Reference Haviland, Gumperz and Levinson1996). Technically, decentering consists of deictic words indexing (presupposing) something other than the ‘here-and-now’ of the utterance, which is what they canonically index (Hanks, Reference Hanks1990, pp. 208ff.), or indexing a ‘here-and-now’ that is altered in imagination.
Fillmore (1982, p. 38) illustrates the phenomenon of shifted deictic center (i.e., imagination-oriented deixis) with the sentences in (10).
-
(10)
-
a. Several years ago, he lived near the beach.
-
b. Several years ago, he had lived near the beach.
-
In (10a), since ago is a deictic word, the time when ‘he’ lived near the beach is understood to be several years previous to the time of utterance. Example (10a) does not involve decentering. In (10b), because of the pluperfect he had lived near the beach, the understanding of the sentence involves imagination-oriented deixis. That is, the time at which he lived near the beach is understood to be several years previous to some imagined deictic center (i.e., an imagined ‘here and now’), which in actual discourse would be supplied by context.
The claim that Moving Ego and Ego-centered Moving Time are canonically deictic means that there are good deictic examples of expressions that employ these metaphors, and also a range of examples on a continuum from deictic to non-deictic. Treating the deictic uses as basic allows us to make sense of the range of data.
Near the deictic end of the continuum, we have examples in which ego’s experience of the present is imagined in detail. Near the other end, few aspects of deixis remain, but we can still understand this type of sentence as being semantically related to the deictic ones. The continuum is illustrated with Ego-centered Moving Time expressions in (11) (cf. Moore, Reference Moore2014a, p. 26).
-
(11)
-
a. Summer has come. (The Ground is the moment of utterance.)
-
b. When summer comes, you’ll know it. (Ground = a future Time with a specified experiencer. This Time is specific in the sense that it is roughly determinable relative to a calendar.)
-
c. The end of the world is bound to come eventually. (Ground = a future Time with an unspecified experiencer. This Time does not have any specific relation to an ordinary, e.g., Gregorian, calendar.)
-
d. A future time is one that hasn’t come yet. (Ground = any imagined present with any imagined experiencer, on the condition that sentence (d) is understood as a definition of a future time.)
-
Thus, although a sentence like (11d) does not depend on its time of utterance for its meaning, its analysis requires deictic principles. That is, in order for the sentence to mean what it does, there has to be some Ego who is experiencing a present moment relative to which a future Time has not yet occurred.
The process of imagination-oriented deixis, or decentering as I shall call it, can proceed to the point that an utterance may hardly seem deictic at all. This can be illustrated with an example of a conventional spatial use of come. Footnote 4 At this point the deictic semantics of come have become quite subjectified (in the sense of Langacker, Reference Langacker2008, p. 537).
-
(12) If you keep on walking, you will eventually come to a bathroom.
In (12), the Ground of come is the unspecified Location of the bathroom. All that seems to remain of the deictic semantics of come is the idea of an expected endpoint or Goal. The highly subjectified spatial deictic semantics of come in (12) are similar to the temporal semantics of come in (13).
-
(13) Tuesday comes after Monday.
This use of come prompts the conceptualizer to imagine an experiencer (Ego) at whose Location the weekdays metaphorically arrive in order (cf. Dewell, Reference Dewell2007). The conceptualizer is defined as whoever is understanding the sentence or utterance in question (cf. Langacker, Reference Langacker1987).
Example (13) gives a rough idea of where the limits of the deictic continuum are, and suggests the possibility that come in (13) evokes in the conceptualizer a notion of metaphorical movement relative to Ego. In other words, there may be two frames of reference involved in (13), one evoked by come and another evoked by after. The semantic involvement of Ego in (13), if it exists, would be part of the background relative to which the after relation between Tuesday and Monday in (13) is understood.
This discussion has brought out the contrast between the terms conceptualizer and Ego. Whereas the conceptualizer is whoever is understanding the sentence, Ego functions as part of the semantics that I am analyzing. Ego is the (possibly fictive) person that the concepts ‘here’ and ‘now’ presuppose. The conceptualizer is a real person who is using language. Claims that I make about what goes on in the conceptualizer’s mind are claims about what I think is logically necessary for a linguistic form (word or phrase) to mean what it does. It goes without saying that psychological methods are also necessary to support hypotheses about what goes on in people’s minds.
It is of course possible (and maybe typical) for the conceptualizer and the role of Ego to have the same viewpoint, as in a case where I might say Ramadan is coming, and I expect Ramadan soon. But we have seen that the conceptualizer and the role of Ego do not necessarily have the same viewpoint, as in a case where I might say or read ‘Ramadan was coming’. Returning to the main thread of this subsection, we have seen that Moving Ego and Ego-centered Moving Time expressions are canonically deictic, and that in order to appreciate this observation, it is necessary to recognize the phenomenon of decentering (i.e., imagination-oriented deixis).
3.2. deictic neutrality
The canonically deictic nature of Moving Ego and Ego-centered Moving Time expressions contrasts with the nature of expressions that instantiate sequence is relative position on a path (Also called ‘front/back Moving Time’), such as those in (14).
-
(14)
-
a. They hoped that the bombing would weaken law enforcement morale ahead of a full-scale uprising against the government. [i.e., before an uprising. KPFA radio 30 March 2010.]
-
b. It is interesting to note that a Dellinger fade out is often followed by a magnetic field change around 48 hours later. [BNC A19 573]
-
In the source frame of sequence is relative position on a path (sequence is position for short), two or more entities move in the same direction on a Path such that one is ahead of another. In the metaphor, the entity that is ahead maps onto an earlier Time and the one that is behind maps onto a later Time. The spatial source frame of ordered motion and the counterpart temporal target frame of succession each apply to a potentially infinite set of entities. The name ‘sequence is relative position on a path’ follows the convention in metaphor theory of naming metaphors with the convention ‘source-frame is/are target-frame’, for example states are Locations .
Sequence is position has generally been analyzed as a submapping of Ego-centered Moving Time, and indeed there is a level of generality at which the two share properties (see Moore, Reference Moore2014b). The reason for analyzing the two as distinct is that while instantiations of Ego-centered Moving Time are canonically deictic, instantiations of sequence is position have no tendency to be deictic, although they are in principle perfectly compatible with deixis. The property of neither favoring nor disfavoring deixis is termed deictic neutrality.
The claim is that instantiations of the metaphor sequence is position, such as those in (14), do not require the conceptualizer to include ‘Ego’s Now’ in the temporal relationship that is depicted by the metaphor. In other words, the concepts Past, Present, and Future are not relevant to sequence is position. A simple demonstration can help make this point. As we have seen, a shift in tense with Ego-centered Moving Time requires the conceptualizer to construct an imaginary deictic field to understand the metaphorical motion relative to Ego. With sequence is position, by contrast, a shift in tense as in (15) induces the conceptualizer to take a different perspective based on the tense, but it does not induce any modification involving the metaphor structure (i.e., Figure–Ground relations).
-
(15)
-
a. New Year’s followed Christmas.
-
b. New Year’s follows Christmas.
-
c. New Year’s will follow Christmas.
-
This perspectival contrast between sequence is relative position on a path (in 14–15) on the one hand, and Moving-Ego/Ego-centered Moving-Time (in 8–9) on the other, can be analyzed as a contrast in the kind of frame of reference the conceptualizer uses.
3.3. frames of reference
A spatial frame of reference is a strategy for using a Ground to say where a Figure is located. A number of recent works treat the topic of space-derived temporal frames of reference, including Bender and Beller (2014, a review of the relevant research), Bender, Rothe-Wulf, Hüther, and Beller (Reference Bender, Rothe-Wulf, Hüther and Beller2012), Evans (Reference Evans2013), Moore (Reference Moore, Achard and Kemmer2004, Reference Moore2014a) Núñez and Cooperrider (Reference Núñez and Cooperrider2013), Tenbrink (Reference Tenbrink2011), and Zinken (Reference Zinken, Evans and Chilton2010). Unfortunately we will not be able to discuss this wide variety of analyses here.
I propose two frames of reference for analyzing sequence is position and Moving-Ego/Ego-centered Moving Time. These frames of reference have to do with how it is possible to use the relevant spatial notions for temporal determination. They do not fully account for the temporal determination, because there are factors involved that are not necessarily directly tied to the spatial strategies that this paper analyzes; examples of such factors are clocks and calendars.
My idea of a spatial frame of reference is the same as that in Levinson’s (Reference Levinson2003) cross-cultural taxonomy of intrinsic, relative, and absolute. The idea that spatial frames of reference should be relevant to temporal metaphor makes sense because temporal metaphor is a matter of mapping spatial relations onto temporal relations.
Since motion involves time, motion metaphors of time are not strictly mappings from space to time. They are mappings from certain frames that involve space and time to other frames that involve time but not space. In a given source frame, spatial and temporal concepts come together in particular ways that make the frame useful for organizing temporal concepts. The fact that the source frames of temporal metaphor are specialized for temporal concepts means that the taxonomy of frames of reference that are relevant to temporal metaphor will not necessarily be the same as the taxonomy of frames of reference that are relevant to spatial concepts in general.
3.3.1. The path-configured field-based frame of reference
The sequence is relative position on a path metaphor, as in Spring follows winter, presupposes a path-configured field-based frame of reference. The term field-based is adapted from (Talmy, Reference Talmy2000, p. 212). Footnote 5 In a field-based frame of reference, all of the relevant entities are oriented in the same way by the same principles. For example, in a cardinal-direction system the east side of every entity is determined in the same way. This orientation does not depend on anyone’s perspective. (Levinson’s, Reference Levinson2003, ‘absolute’ frame of reference is a subtype of field-based.)
The path-configured field-based frame of reference consists of two or more physical entities on a Path that are all moving in the same direction, as in (16).
-
(16) The stick is floating ahead of the ball in the stream.
The direction of motion orients the entities such that an entity that is more advanced in the direction of motion is said to be ahead of an entity that is less advanced, and an entity that is less advanced is said to be behind. Since the direction of motion is a property of all the entities in the frame of reference, the frame of reference is field-based. To see this frame of reference as similar to an absolute system such as a cardinal direction system, imagine that every entity in the universe is on the same Path. This is something like the situation we have metaphorically if we think of time as a one-dimensional universe consisting of Times in a line.
3.3.2. The path-configured ego-perspective frame of reference
Contrasting with the field-based frame of reference is the path-configured ego-perspective frame of reference. Footnote 6 In an ego-perspective frame of reference, the relationship between Figure and Ground depends in some crucial way on Ego’s perspective. This type of frame of reference is presupposed by Moving Ego and Ego-centered Moving Time. In the source frames of these metaphors, the Location of the Figure is determined based on relative motion between Figure and Ground. There are three possible configurations (here I will speak of Mover and Location instead of Figure and Ground, to avoid complications in the analysis of Figure–Ground structure): the Mover is moving toward the Location, the Mover is at the Location (and moving away), or the Mover is moving away from the Location (and not at the Location). These possibilities are illustrated in (17) and (18) with a mix of Moving Ego and Ego-centered Moving Time examples.
-
(17)
-
a. We are approaching the deadline. (Moving Ego)
-
b. The deadline is approaching. (Ego-centered Moving Time)
-
-
(18)
-
a. We have passed the deadline. (Moving Ego)
-
b. The deadline has arrived. (Ego-centered Moving Time)
-
c. The deadline has passed. (Ego-centered Moving Time)
-
In the ego-perspective frame of reference, if the Mover is moving toward the Location, as in (17) above, the expression designates a Future Time. If the Mover is located at the Location, the expression designates the present (18b). If the Mover is Moving away from the Location, (18a) and (18c), the expression designates a Past Time. The relative motion between a Mover and a Location in the frame of reference corresponds to the changing temporal relation between Ego’s Now and some other Time in the metaphorical understanding.
The spatial frame of reference that is most similar to the ego-perspective frame of reference is Talmy’s (2000, p. 212) guidepost-based strategy for localizing a Figure, which is equivalent to Bohnemeyer and O’Meara’s (Reference Bohnemeyer, O’Meara, Filipović and Jaszczolt2012) head-anchored frame of reference. The similarity is that both kinds of frame of reference use a vector to determine the Location of the Figure. In the ego-perspective frame of reference, the vector is based on the direction of motion (see Moore, Reference Moore2014a, p. 58).
The definitions of ego-perspective and field-based are neutral regarding the different kinds of experience we are concerned with – spatial, movement, or purely temporal. Thus, alongside the metaphorical path-configured ego-perspective frame of reference, there are non-metaphorical ego-perspective frames of reference such as the English tense system. Tense and the conceptual metaphors discussed in this paper constitute different systems, so, for example, it is not abnormal for an English sentence to have an ego-perspective evoked by tense and a metaphorical construal that is perspectivally neutral, for instance (15a) above (New Year’s followed Christmas). Alongside the path-configured field-based frame of reference there is a non-metaphorical field-based frame of reference based on the relation earlier/later. The notions Figure and Ground are neutral regarding space and time, so a temporal Figure can be determined relative to a temporal Ground without any appeal to spatial relations, as in example (19).
-
(19) The ball game [Figure] was earlier than the card game [Ground].
It is well known that sequence is position and Moving Ego assign different front/back orientations in temporal expressions, so that in The weeks ahead of Christmas will be busy (sequence is position), ahead refers to ‘the weeks before Christmas’, and in We will be busy in the weeks ahead [of ‘now’] (Moving Ego), ahead refers to future weeks; i.e., weeks that are ‘after Now’ (Clark, Reference Clark and Moore1973). This semantic contrast will be treated in detail as the paper progresses.
3.4. summary and conclusions for ‘Frames of reference and imagination-oriented deixis’
Motion metaphors of time depict temporal phenomena in terms of source-frame motion scenarios. The construals of these motion scenarios presuppose frames of reference that structure how the metaphors depict temporal concepts. I have proposed two contrasting frames of reference: ego-perspective and field-based, each of which structures semantic relationships among entities on a Path. These frames of reference are based on particular motion events that involve the temporal concepts depicted by the metaphors. The field-based frame of reference is based on a scenario in which two Movers are ordered in an ahead/following relation. The ego-perspective frame of reference is based on a scenario in which a Mover approaches, arrives at, and passes a Location. (In later sections we will consider mappings that involve space without motion.)
The ego-perspective frame of reference can be decentered/transposed. That is, the elements of the frame of reference can be instantiated by conceptual content that is not present in the ‘here and now’, or the situation of utterance can be otherwise altered in imagination. Footnote 7 An analysis of temporal metaphor must take decentering into account because a decentered deictic utterance may be used in a way that does not actually depend on the situation of utterance but still depends on deictic principles, as in (11d) above (A future time is one that hasn’t come yet). Now that we have a clear view of some of the functions of motion metaphors of time, we are ready to have a closer look at some of the spatial and temporal concepts involved.
4. Experiential bases
While different in some details, my discussion of temporal metaphor is entirely consistent with the accounts of Lakoff and Johnson (Reference Lakoff and Johnson1980, Reference Lakoff and Johnson1999), Grady (Reference Grady1997, Reference Grady2005, Reference Grady, Tyler, Kim and Takada2008), and Dancygier and Sweetser (Reference Dancygier and Sweetser2014). Essential to conceptual metaphor theory is the idea of experiential basis or motivation (Lakoff & Johnson, Reference Lakoff and Johnson1980, p. 18). Experiential motivations are certain types of everyday experience that motivate people to form metaphoric conceptual mappings.
4.1. experiential motivations of the ego-perspective metaphors
One way of approaching experiential motivations is to talk about grounding scenarios. These are scenarios in which source-frame and target-frame concepts correlate saliently, similar to Grady and Johnson’s (Reference Grady, Johnson, Dirven and Pörings2002) primary scenes. Footnote 8 The idea of a grounding scenario or a primary scene is that the scenario/scene highlights the source-frame and target-frame concepts of a given metaphor in a single experience of a type that is recurrent in everyday life. Studying grounding scenarios – which include more structure than is actually mapped – is a way of exploring the spatial and temporal concepts that are involved in the metaphors. In Sections 6 and 9, we will discuss primary metaphors, which arise from primary scenes. Now let us look at the grounding scenario for Moving Ego.
The grounding scenario for Moving Ego. Ego (Mover) is moving along a Path. The remembered Locations she has passed are behind her. Memories of being at these Locations correlate in her experience with memories of Past Times. Her Location, which is constantly changing, correlates with her experience of the Present moment. The farther she goes the later it gets. The Locations ahead of her correlate in her experience with her expectations of Future arrival at those Locations. Her arrival at a Location that was ahead of her correlates with the occurrence of an expected Time. She keeps going and then the Location is behind her.
I use occur as a technical term for talking about Times as events. To say that a Time occurs is equivalent to saying that it ‘comes’. Here are some sample sentences that could be said in the context of the Moving Ego grounding scenario.
-
(20)
-
a. The station is ahead.
-
b. We are approaching the station.
-
c. We have arrived at the station.
-
d. We have passed the station.
-
In the grounding scenario for Moving Ego, we see analogues to all of the temporal concepts that the metaphor depicts. For example, corresponding to the Past being metaphorically behind Ego, we have Ego remembering Locations behind her where she has been. Ego’s expectations of her future arrival at a Location corresponds to the Future being metaphorically ahead of her. Now let us look at the grounding scenario for Ego-centered Moving Time.
The grounding scenario for Ego-centered Moving Time. Ego is located somewhere. She perceives an approaching distal entity (Mover). The distal entity correlates in her experience with her expectation of its Future arrival at her Location. The closer the entity gets the sooner she expects it to arrive. Decreasing time-until-arrival correlates with decreasing distance between the entity and Ego. The arrival of the entity correlates with the occurrence of an expected Time. The entity keeps moving and then it is gone.
Here are some sample sentences that could be said in the context of the grounding scenario.
-
(21)
-
a. The bus is coming.
-
b. The bus has arrived.
-
c. The bus is going by
-
d. The bus has gone by.
-
Parallel to the case of Moving Ego, the grounding scenario for Ego-centered Moving Time has analogues to all of the temporal concepts that the metaphor depicts.
4.1.1. The contrasting metaphorical directions of motion in Moving Ego and Ego-centered Moving Time
We have just seen two scenarios that have rich temporal structure in which time lapses as the Mover approaches the Location. At a certain level of schematicity, the two scenarios are equivalent in that they both involve a Mover approaching and passing a Location. Now let us look at the contrasts involved in whether Ego or another entity is moving. We will look at the grounding scenarios and at the metaphor mappings.
In the grounding scenario for Moving Ego, as Ego moves, the current time gets later, and this motivates a mapping from Locations that are more advanced on the Path to later Times (Sweetser, Reference Sweetser, Axmaker, Jaisser and Singmaster1988); i.e., the metaphorical direction of motion is earlier-toward-later. English speakers talk about this metaphorical motion as forward motion, as in (22).
-
(22) This is the estimate that appears to be most accurate as we go forward in time from the April accident. [Approximate transcription from a 7 July 2010 radio broadcast on KPFA. The topic is the BP oil spill in the Gulf of Mexico.]
Approaching the Location counts as forward motion in Moving Ego but not Ego-centered Moving Time. Thus, (23a) and (23b) sound much more natural than (23c) to talk about the lapse of time. A context for (23c) would involve successive occurrences of Christmas at later and later dates, involving Times are Locations and something analogous to pattern-path fictive motion (see Section 6.5). So even if (23c) is acceptable, it is not a direct mapping from motion to ego-centered time like Moving Ego and Ego-centered Moving Time are.
-
(23)
-
a. As we move forward into the 21st century …
-
b. As Christmas gets closer …
-
c. #As Christmas moves forward (into the 21st century) …
-
Based on this observation, we can infer that the motion of the Mover in the grounding scenario of Ego-centered Moving Time is not mapped to the target frame as forward motion. Also, as the Mover moves in the Ego-centered Moving Time grounding scenario, the time gets later, just like it does in the Moving Ego grounding scenario. But in the case of Ego-centered Moving Time, this correlation does not motivate a mapping from entities that are more advanced on the Path to later Times. Instead, in Ego-centered Moving Time, a Mover that is metaphorically located in the Future moves toward the Present; thus the metaphorical direction of motion is later-toward-earlier. To put this in a technically precise way, the movement is from a region that maps onto a later time toward a region that maps onto an earlier time. The motion is defined as motion relative to Ego’s position. The ‘regions’ themselves are not precisely defined. As a matter of convenience, I will use the term later-toward-earlier to talk about this metaphorical ‘direction’. Footnote 9
Instead of the correlation between forward motion and time getting later, what is relevant in the motivation of Ego-centered Moving Time is the correlation between the entity’s progressively getting closer to Ego and the decreasing time until the entity is expected to arrive at Ego’s Location: the closer the Mover gets, the sooner Ego expects it to arrive. This detail about the experience of motion motivates the metaphorical construal of the situation in which Now gets later as one in which ‘a Future Time gets closer to Now’.
As we have seen, in the earlier-toward-later metaphorical direction, a Mover (Ego) that is moving forward maps onto a present moment that is getting later. It makes sense that Ego has the role of Mover in this metaphorical direction because the structure of the metaphor is analogous to that of actual motion from the point of view of Ego as Mover, as we saw in the description of the Moving Ego grounding scenario. This structure is also consistent with our (European and American English speakers’ at least) idea of the “evolution of reality” (Langacker, Reference Langacker1991, pp. 242ff.), in which we understand processes to happen in the present, which becomes later and later as the changes involved in the process occur. For example, if I cook an eggplant, I understand the eggplant to become more and more cooked as the current time gets later and later, rather than a cooked eggplant coming from the future to the present (cf. Moore, Reference Moore2014a, p. 53).
Implicit so far in this discussion is the claim that Here always maps onto Now in an ego-perspective metaphor. This claim is reasonable because the mapping from Here to Now is widely attested cross-linguistically, including in signed languages and co-speech gesture. Assuming, then, that Here maps onto Now, there cannot be a primary mapping in which Ego moves from later toward earlier, because such a mapping would require, at some point, that Ego be metaphorically located in the future, or that Ego would move from the present toward the past. Ego cannot be located in the Future since her Location has to map onto Now, and Ego cannot move toward the Past because this would imply that Now gets earlier. The claim that Ego cannot metaphorically move from later toward earlier is consistent with our analysis of the grounding scenarios, in which if Ego’s point of view is with the Mover we have the relevant correlation between advancement on the Path and Now getting later, but if the Mover is moving relative to Ego, that correlation is ignored.
A further implication of this discussion, suggested by the infelicity of (23c) in the stipulated context, is that autonomous motion in the earlier-toward-later metaphorical direction, thought of in terms of forward motion, is not appropriate to the construal of a Time other than Now as a moving entity. Footnote 10 This idea will be developed as the paper progresses.
To summarize, this subsection has described some of the contrasts in the experiential motivations and mapping structures of Moving Ego vs. Ego-centered Moving Time.
4.2. earlier-toward-later metaphorical motion not involving Ego
In addition to the earlier-toward-later metaphorical forward motion that is associated with Ego, this subsection examines such motion in the absence of Ego. The observation in Section 4.1 about the correlation between Ego’s forward motion and the present moment getting later also applies as a default to any entity that moves relative to some background (Kranjec, Reference Kranjec2006). That is, for any moving entity, a region that is more advanced on its Path correlates in experience with a later Time. And this kind of motion can be thought of as forward motion unless there is some motivation to the contrary. This idea is illustrated in (24). The context is that a small ball is rolled along a horizontal track in an experiment.
-
(24) There is a scale on the track so we can measure the forward motion of the ball.
Consistent with the observation that the (forward) motion of any moving entity correlates with Now getting later, we have three metaphors in addition to Moving Ego in which a moving entity maps onto a Time and an entity that is more advanced on the Path maps onto a later Time.
-
Now is a Mover as in It’s getting close to midnight. [Cf. Lakoff & Turner, Reference Lakoff and Turner1989, pp. 44ff.]
This metaphor seems to be similar to Moving Ego except that the present moment is characterized with the word it as an aspect of the setting of the utterance (Moore, Reference Moore2014a, p. 43).
-
Time is a Mover as in Time marches on, or Time keeps moving forward.
Expressions of this metaphor can be paraphrased as ‘The present moment always gets later’, so it may be possible to analyze time is a Mover as a decentered perspectival metaphor. This is speculative, but it may be possible to analyze the Ground relative to which ‘time’ moves as the previous Locations occupied by the Mover. This is consistent with the idea that English speakers are comfortable with the metaphorical construal of ‘Now getting later’ as forward motion.
If we assume that this construction refers to the present moment in general rather than the Now of the speech act, it seems that the subject slot is restricted to the words time and hour, and perhaps other words that refer to the ‘matrix’ sense of time (cf. Evans, Reference Evans2003, chapter 11). Note that Time is a Mover is not the same as a Time is a Mover, the latter being entailed by Moving Time metaphors (Ego-centered Moving Time and sequence is relative position on a path).
-
A situation is a Mover
This one is different from the other ‘forward motion’ metaphors in that it profiles the internal constituency of a situation, and does not necessarily designate when the situation occurs. Moore, Reference Moore2014a, p. 44). Footnote 11 That is, the metaphor depicts the aspectual progress of a situation. For example, (25b) depicts the entire duration of a situation as occupying an extent rather than depicting a discrete Time as an entity that changes Location relative to a Ground. In fact, (25c), which is similar to (25b), could be analyzed as involving extent rather than motion, loosely analogous to (25d). While I am comfortable claiming that (25a) is a motion metaphor of time, we might want to analyze (25c) in some other way, noting that a starting time is marked with from and an ending time is marked with to.
-
(25)
-
a. The rainy season went on for a long time without any rain.
-
b. The party went from dawn to dusk.
-
c. The beans boiled from dawn to dusk.
-
d. The clothesline hung from the house to the shed. [But note that (d) is imperfective while the others are perfective.]
-
In addition to the correlation between forward motion and the current time getting later, another motivation for structures like (25a–25c) is that earlier-to-later is presumably the most reasonable order in which to scan a process, Footnote 12 since that is the order in which processes are understood to evolve (Section 4.1.1). Example (26a) from Langacker (2008, p. 502) is evidence for an earlier-to-later bias because the order of mention of the opening and closing times iconically represents the actual order, and it would not normally be felicitous to reverse the order and say that the stores are open ‘between 10 and 7 in the evening’ to convey the meaning in (26a).
-
(26)
-
a. In the evening, stores are open between 7 and 10.
-
Further suggestive evidence that English speakers presuppose an earlier-to-later order when talking about temporal phenomena comes from the temporal meaning of next as in (26b) (cf. Langacker, Reference Langacker, Pecher and Zwaan2005).
-
(26)
-
b. You milk the goats and next you milk the cows.
-
c. The well is next to the barn.
-
d. She took off her shoes and started smoking.
-
Assuming that the temporal meaning of next comes from a meaning of proximity as in (26c), the reason it is used to talk about a later rather than earlier event would be that an earlier-to-later organization is assumed. This organization is also assumed in the iconic word order of (26b) and of (26d), assuming that (26d) means that she started smoking after she took off her shoes. The iconic word order is a material anchor (Hutchins, Reference Hutchins2005) for the conceived earlier-to-later organization of events.
Examples like (27) are consistent with the claim that people scan from earlier toward later, and that this direction is talked about as forward. In (27) a time period is being scanned rather than a process.
-
(27) Many physicians from that time forward were of the opinion that nearly all the late complications of syphilis were, in fact, the result of mercury poisoning [BNC ARH 142]. (Ground = that time.) [Moore, Reference Moore2014a, p. 125]
To summarize, this subsection has treated cases in which the direction of scanning or a metaphorical Mover other than Ego goes from earlier toward later. We see that even when Ego is not in the conceptualization, English speakers can talk about earlier-toward-later metaphorical motion as forward motion.
4.3. the grounding scenario for ‘sequence is relative position on a path’
This subsection discusses a grounding scenario that is strikingly different from the ones that motivate Moving Ego and Ego-centered Moving Time.
The grounding scenario for sequence is relative position on a path (Svorou, Reference Svorou1994)
Two entities (Movers) are both moving on the same Path such that one is more advanced than the other. The one that is more advanced arrives at any given Location first (and the one that is less advanced arrives later).
Minimally, this scenario involves two physical entities on a Path, and an event of arrival to motivate the mapping from an entity that is ahead to a time that is first. Fully elaborated, the scenario involves a sequence of two events of arrival. The sentence in (28) could be used in context to refer to an instance of the grounding scenario.
-
(28) Example sentence for the grounding scenario of sequence is relative position on a path
-
Pat [Figure] got to the office ahead of Kim [Ground].
In (28), when the first arrival occurs, the Figure (Pat) is ahead of the Ground (Kim), and this position ahead stands metonymically for the temporal relation ‘first’ which holds between Pat’s arrival and Kim’s presumed subsequent arrival. For further discussion, see Moore (2014a, Sections 6.2.2, 6.3, and 9.2). An example of sequence is relative position on a path is given in (29) for comparison with the non-metaphorical example in (28).
-
(29) There was fierce campaigning [Figure] ahead of the elections [Ground].
The Figure–Ground structure of the source frame of sequence is position requires some discussion because although sequence is position is a motion metaphor of time, the Figure does not necessarily move relative to the Ground. Movement is involved at a secondary level of Figure–Ground organization (Talmy, Reference Talmy2000, p. 336). This can be explained using an example sentence with follow.
-
(30) Fido [Figure] followed Gretchen [Ground] along the road.
Fido is analyzed as the primary Figure because it is his Location which is determined via the predicator follow relative to Gretchen, who accordingly serves as primary Ground. Next, there is a secondary level of meaning, since the ‘follow’ relation says that both entities in the relation are moving. Thus, Fido and Gretchen, considered together, constitute a secondary Figure which is moving relative to the road. Because they are moving in the same direction, the Figure and Ground maintain the same go-ahead/follow relation to each other regardless of the direction of motion relative to the secondary Ground or relative to the conceptualizer.
To summarize, in the grounding scenarios of the ego-perspective metaphors, there is one pertinent level of Figure–Ground organization, which has to do with relative motion between Figure and Ground. In the grounding scenario of sequence is position there are two levels of Figure–Ground organization: the primary Figure and primary Ground do not move relative to each other, even though as a unit (composite secondary Figure) they move relative to a secondary Ground.
4.4. past, future, and the psychological present
The ego-perspective grounding scenarios involve oppositions between past and present, and between present and future. This is explicit where the scenarios involve memory and expectation. The field-based grounding scenario (i.e., the one for sequence is position), by contrast, does not involve the concepts ‘past’ or ‘future’. In fact, the relation of succession cannot be analyzed in past–present–future terms. This is because successive events can happen during the present moment.
A possible alternative analysis would have the present as a ‘point’ that separates past and future. But the present as people experience it has duration, if we define the present as the time during which a person perceives, as opposed to times which are remembered or expected. Paul Fraisse demonstrates this point with the example of rhythm. When people experience rhythm, there are successive beats but they are perceived together. Fraisse’s (1963, p. 89) experimental subjects lost the sensation of rhythm when the interval between beats was increased to about 2 seconds. This is because the maximum duration of the psychological present for Fraisse’s subjects in that experiment was less than about 2 seconds.
In the sequence is position grounding scenario, one can imagine successive arrivals well within the limits of the psychological present. In such a scenario, one could perceive the go-ahead/follow relation and the relation of succession together simultaneously as different aspects of a gestalt. For this reason, there is not necessarily any expectation or memory involved in the grounding scenario of sequence is position.
To summarize, in the ego-perspective grounding scenarios, the movement of a Figure relative to a Ground correlates with Ego’s experiences of remembering the Past, perceiving the Present, and expecting the Future. In the field-based grounding scenario there are two successive events that are not analyzable in terms of Past–Present–Future because the events can happen together during the Present. This is true of any present moment. While Past, Present, and Future are constantly changing because the Present is constantly getting later, the temporal relationship between the successive events in the field-based grounding scenario does not change. Ego-perspective metaphors but not sequence is position depict experience of the Present.
5. In-front and behind in sequence is relative position on a path
The in-front/behind relation is cross-linguistically prominent among spatial relations that map onto temporal relations (cf. Haspelmath, Reference Haspelmath1997). In Section 4.1 we saw how the grounding scenario for Moving Ego motivates the Future being metaphorically ahead or in front of Ego and the Past behind. In this section we will look at a contrasting in-front/behind relation in which in-front is used to talk about an earlier Time, and behind is used to talk about a later Time. I write (in-)front and behind in capital letters to indicate concepts that may have different variants in different languages.
The earlier=in-front/later=behind phenomenon can be introduced with the English temporal words before and after. Historically, before meant ‘in front’, and before still has that meaning in certain formal contexts, for example addressing a crowd and saying I stand before you today to tell you that the world is safe for democracy (see Tenbrink, Reference Tenbrink2007). After meant ‘behind’ in motion contexts at an earlier stage of English, and still has a ‘behind’ meaning as in She followed after him. Currently, the words before and after participate in unmarked constructions used to talk about sequence, as in (31).
-
(31)
-
a. They left town before the rain.
-
b. They received visitors after lunch.
-
c. She cleaned the windows before she scrubbed the shower.
-
There is an analogous semantic pattern in Japanese, except that the front/behind words are unmarked in both spatial and temporal constructions: Mae ‘front’ is also used to mean ‘earlier’, and ato ‘space behind a moving entity’ is also used to mean ‘later’, as in (32).
-
(32)
-
a. Mati ni iku mae ni ki ni nobotta.
town dat go front dat tree dat climbed
‘Before I went to town, I climbed a tree.’ [Kyoko Hirose Ohara]
-
b. Syokuzi no ato de ha o migaita
meal gen ato loc teeth acc brush:past
‘After a meal, [I] brushed my teeth.’ (Almost anything could be said to happen after a meal with this construction.) [Katsuya Kinjo]
-
Front/behind vocabulary can instantiate sequence is position because in a scene of two moving entities, the one that is more advanced on the Path can be referred to as being in front of the other, and the one that is less advanced can be referred to as being behind, as in (33), in which two sticks are floating along in a stream.
-
(33)
-
a. The big stick is floating along in front of the little stick.
-
b. The little stick is behind the big stick.
-
In Japanese, the words mae ‘front’ and ato ‘space behind a moving entity’ can be used analogously to example (33), as seen in (34).
-
(34)
-
a. (Imanotokoro) Harriet no pooru ga
(at the moment) Harriet gen pole nom
Harry no pooru yori mae desu
Harry gen pole from front cop.polite
‘(At the moment) Harriet’s pole is more front than Harry’s pole.’ ‘(At the moment) Harriet’s pole is ahead of Harry’s pole.’ [Personal communication Yukio Hirose 4 April 1996.]
-
b. (Imanotokoro) Harry no pooru ga
(at the moment) Harry gen pole nom
Harriet no pooru yori ato desu
Harriet gen pole from behind cop.polite
‘(At the moment) Harry’s pole is more behind than Harriet’s pole.’ ‘(At the moment) Harry’s pole is behind Harriet’s pole.’ [Yukio Hirose, 4 April 1996.]
-
Because this grounding scenario is perspectivally neutral, it is plausible that deictically neutral temporal constructions with front/behind words like mae and ato instantiate sequence is position.
In support of the claim that sequence is position motivates earlier=in-front/later=behind expressions, observe that there are no obvious alternative motivations that are perspective-neutral. Ego-centered Moving Time is ruled out because it is structured by Ego’s perspective. Another proposed motivation for the earlier=in-front pattern is the ‘reflection relative’ strategy in which an entity in a series which is closest to Ego is in front of one that is farther (Traugott, Reference Traugott1975). We can rule out this possibility on the grounds that the reflection relative strategy depends on Ego’s perspective. See Moore (2014a, pp. 192–193) for the complete argument on this particular point; also see Haspelmath (1997, p. 60).
The best competing proposal for perspective-neutral earlier=in-front comes from Bender and Beller (2014, p. 375) and Bender, Beller, and Bennardo (2010, p. 290). This is the idea that a beginning is metaphorically a front, or in Zinken’s (2010, p. 487) formulation, that an earlier event is in front of a later one because the earlier one is metaphorically closer to the beginning of the relevant inclusive time period (e.g., the day). The idea that a beginning is a metaphorical front is intuitively very sensible, but I have not seen an explanation for how beginning can motivate a perspectivally neutral front. To get an idea of what such an account might look like, consider Aymara (South America). In Aymara, nayra ‘front’ can designate an earlier Time (Núñez & Sweetser, Reference Núñez and Sweetser2006). This may be motivated because people are fictively oriented towards the sunrise in that culture. That is, the place where the sun rises is fictively in front of people, and sunrise is the earliest part of the day (Moore, Reference Moore2011, Reference Moore2014a, p. 145; Núñez & Cornejo, Reference Núñez and Cornejo2012), so there is a cultural correlation between front and first. However, this motivation depends on people fictively facing sunrise, and would not seem to apply in general.
Additionally, the motion-scenario account explains why a pattern arises cross-linguistically in which the temporal semantics of go-ahead/follow are similar to those of in-front/behind in some instances. For example, in English, the temporal semantics of follow (but not the syntax) are similar to those of after. Moreover, in the case of some behind words, such as Japanese ato ‘space behind a moving entity’, which derives historically from a meaning of ‘trace’ (Yamaguchi, Reference Yamaguchi2012), the behind notion does not have to do with the back of anything, but arises only in a motion scenario. Among the spatial uses of after in the Oxford English Dictionary, all of the earliest ones involve a motion scenario (Moore, Reference Moore2014a, p. 109). The motion scenario thus remains the most plausible cross-linguistic motivation for the deictically neutral earlier=in-front/later=behind pattern.
5.1. the tendency of unmarked coding of ‘in-front/behind’
Given that a motion scenario is a plausible motivation for the earlier=in-front/later=behind pattern of temporal reference, it is interesting that there is evidence for a cross-linguistic tendency in which this pattern appears with deictically neutral expressions, among languages that use in-front or behind to talk about temporal concepts. This pattern can be seen in examples (31–32) above, which illustrate how Japanese and English conform to the tendency (Moore, Reference Moore2006, Reference Moore2014a, Section 11.2). The tendency is stated here:
The tendency of unmarked coding of in-front/behind expressions of sequence
a. If an in-front or behind expression-type means ‘earlier’ or ‘later’ and occurs freely without deictic anchoring, in-front will correspond to ‘earlier’ and behind will correspond to ‘later’.
b. Where there is an expression in a language that contradicts part (a) of the tendency, there will be a more common, less marked, way of saying ‘earlier’ or ‘later’ in that language. This less marked way of saying ‘earlier’ or ‘later’ will conform to tendency (a) if it employs an in-front or behind expression.
Further illustrating the idea of the tendency with the words before and after, the hypothesis is that the words before and after have no tendency to be used deictically in their ‘earlier’ and ‘later’ meanings (respectively) because the motivating metaphor is neutral regarding perspective. Moreover, since the motivation is perspectivally neutral, the hypothesis does not offer any reason why before or after should not be used deictically. Footnote 13 (This motivation may be only historical in the case of before/after, but is current in languages like Japanese that synchronically have the polysemy pattern.) Example (35a) illustrates a deictic use of before, and (35b) illustrates a non-deictic use.
-
(35)
-
a. Before, I used to drink wine. (sequence is position, deictic)
-
b. I wash my hands before I eat. (sequence is position, not deictic)
-
Example (35c) illustrates a use of before in which ‘later’ (future) is in front of Ego, presumably instantiating the Moving Ego metaphor. This illustrates the corollary of the tendency of unmarked coding, which is that later=in-front and earlier=behind expressions should tend to occur with deictic anchoring. (Note that the tendency does not make predictions about whether or not instances of the earlier=in-front/later=behind pattern will be deictic.)
-
(35)
-
c. She has a wonderful future before her. (Moving Ego)
-
The ‘future’ meaning of before in (35c) is presumably due to the evocation of Ego’s bodily orientation via the personal pronoun her as complement of before. According to this account, Ego’s bodily orientation is not evoked in (35a) because the unstated complement of before in (35a) is understood to be the present time rather than ego. Consistent with the theory of Levinson (Reference Levinson2003), the frame of reference is not determined according to whether the Ground is associated with Ego. Rather than depending on the nature of the Ground itself, the relevant characteristics of the path-configured field-based frame of reference, stated for the source frame, are these:
-
i. The only criterion for determining the status of the Figure relative to the Ground is whether it is more or less advanced on the Path.
-
ii. The frame of reference determines an unchanging relationship between Figure and Ground: Their relative positions do not change, and the Figure does not get closer to or farther from the Ground. [Moore, 2104a, pp. 135–136, 139]
In the informal checking that I have done, languages that use deictically neutral front or behind terms for sequence exhibit the tendency. For example, the data in Haspelmath (Reference Haspelmath1997), a cross-linguistic survey of spatial expressions that are used to talk about time, mostly conform to the tendency. See Moore (2014a, chapter 11) for discussion. It is interesting that the earlier=in-front/later=behind pattern in deictically neutral or non-deictic expression types is found in many typologically different languages in different families in different parts of the world, from Yucatec Maya (Bohnemeyer, Reference Bohnemeyer1998, p. 257; Le Guen & Pool Balam, Reference Le Guen and Pool Balam2012, p. 7 Footnote 14 ) to Aymara (Núñez & Sweetser, Reference Núñez and Sweetser2006) to Finnish (Huumo, Reference Huumo2015) to Mandarin Chinese (Yu, Reference Yu2012). The widespread occurrence of the pattern suggests that it is motivated by human experience.
6. Spatial and temporal concepts in the metaphors
Now we are almost in a position to separate some of the spatial and temporal components of the grounding scenarios and metaphor mappings, although we will see that it is not always practical to keep spatial and temporal concepts separate, since motion combines the two seamlessly. As we proceed, we will analyze Moving Ego and Ego-centered Moving Time into primary metaphors, because this will reveal the fundamental correlations between spatial and temporal concepts that interest us.
A primary metaphor is a metaphor that has “a direct experiential basis, and which motivate[s] highly predictable sets of data” (Grady, Reference Grady1997, p. 47). Footnote 15 An example of a primary metaphor is sequence is relative position on a path. The positions on the Path and the event of arrival in the experiential basis directly motivate the metaphorical construal of sequence, and we can reliably predict how the source frame maps onto the target frame. Thus the first definitional characteristic of a primary metaphor is that the proposed motivation alone motivates linguistic expressions. Another definitional characteristic of a primary metaphor is that it is motivated by a primary scene (mentioned in Section 4.1), which for our purposes is equivalent to a grounding scenario or part of a grounding scenario, in which the correlation between the source and target concepts is salient and pervasive in everyday experience. A final definitional characteristic of primary metaphors is that they cannot be broken down into component metaphors. Moving Ego and Ego-centered Moving Time are not primaries because, as we are about to see, they can be broken down into component mappings. This section discusses primary metaphors to the extent they are useful for identifying spatial and temporal concepts. In Section 9 we will survey the primaries involved in the analysis.
Moving Ego and Ego-centered Moving Time involve relatively elaborate motion events in their grounding scenarios. Each of the events has four stages, numbered (1–4) in Tables 1 and 2, and on the example sentences that are given for illustration. That the events have stages contributes to why these metaphors are analyzable into components, but the purpose of introducing the stages here is to see the temporal structure of the source frame. In Tables 1 and 2, the first submapping (Here → Now) is not numbered because it is an overarching organizational principle for the whole scenario. Here and Now have quotation marks to emphasize the fact that I do not mean the actual here or now of writing or reading this paper. The spatial and temporal concepts to be discussed below all exist in the context of the motion scenarios in the source frame of the metaphors (Section 4.1).
Sentences to illustrate the stages in Table 1
-
1. The couple have a psychological commitment to each other where they feel they can count on the person being around in the years ahead. Footnote 16 [9 July 1999]
-
2. We are approaching the end of summer.
-
3. We have arrived at the end of summer.
-
4. We have passed the deadline.
Sentences to illustrate the stages in Table 2
-
1. Summer is still a long ways off.
-
2. Summer is approaching.
-
3. Summer has arrived.
-
4. Summer has come and gone.
With the above motion scenarios and mappings in mind, we will now analyze some of the component concepts.
table 1. Moving Ego

table 2. Ego-centered Moving Time

6.1. location
The main way that the concept of location is relevant to temporal metaphor is that co-location (being at the same place) maps onto simultaneity; this is a primary metaphor: simultaneity is co-location. We have seen this mapping instantiated more specifically as Now is Here, which is a primary submapping of both Moving Ego and Ego-centered Moving Time. Now is here is exemplified in (36a) and (36b). Example (36c) shows the other primary variant of simultaneity is co-location: Times are Locations.
-
(36)
-
a. Summer is here.
-
b. Summer has arrived.
-
c. We are in summer.
-
Summer is analyzed as the Figure in (36a) because it is the entity whose Location is at issue. Also, I interpret (36a) as analogous to (36b), in which Summer is figural because it is depicted as a Mover that is located at an unstated Ground, which is a Location that maps onto the moment of the speech event. Sentence (36c) is an example of Times are Locations because it takes Now as the Figure (expressed as we) and metaphorically locates it in summer, where summer is the Ground; i.e., (36c) tells us that the present time is simultaneous with part of summer. Sentence (37) is an example of Times are Locations in which Ego is not involved. In the example, the event of snowing is metaphorically located in May.
-
(37) It snowed in the middle of May.
Consistent with the logic of simultaneity is co-location (which is a statement of a mapping that generalizes over Now is Here and Times are Locations), entities that map onto Times and are not co-located with each other map onto different Times. For example, the distal Christmas in Christmas is coming is distinct from Now, which is the counterpart of the Location of the speech act. This inference pattern also applies to sequence is position, which does not depict simultaneity, since an essential feature of its structure is that Figure and Ground are not in the same position. This contrast between the ego-perspective and field-based metaphors is evident in the contrasting types of predicators involved. The ego-perspective metaphors may use predicators that involve co-location, such as arrive, but sequence is position does not use such predicators.
To summarize, there is a primary mapping from Locations to Times which is a component of both Moving Ego and Ego-centered Moving Time, and also exists independently. This primary metaphor yields predictable inferences.
6.2. motion
6.2.1. Motion between primary Figure and primary Ground
A typical motion scenario has a Location as primary Ground; e.g., somebody walking along a street or past a tree. Scenarios that involve Mover plus Location as primary Ground involve spatial concepts but also profile motion; i.e., change of location, as in (38).
-
(38)
-
a. The bus is approaching. (The bus is the Figure/Mover. The location of the speech act is the Ground/Location.)
-
b. Summer is approaching.
-
For the purposes of temporal metaphor, the configuration of Mover and Location in (38a) above is sometimes interchangeable with that in (39a) below, where the Mover is Ground and the Location is Figure. Recall that the word ahead requires that its Ground be a Mover (see footnote 16).
-
(39)
-
a. There is a rest stop ahead. (Said in a moving car in order to indicate where the rest stop is located. The Ground/Mover role is instantiated by the speech-act participants. The Figure/Location is the rest stop.)
-
b. The weeks ahead should be interesting.
-
We can now identify a schematic motion event that generalizes over the grounding scenarios of Moving Ego and Ego-centered Moving Time. This level of shared structure expresses the generalization that was pointed out in Lakoff’s (1993, p. 217) analysis in which Moving Ego and Moving Time are special cases of time passing is motion. We saw the basic outline of this type of schematic motion scenario in Section 3.3.2, where the ego-perspective frame of reference was characterized in terms of whether the Mover is moving towards or away from the Location. The scenario is also implicit in the statement of the metaphors in Tables 1 and 2 near the beginning of the current section. Using the schematic motion event as a starting point, we will look at the spatial and temporal concepts in the grounding scenarios and metaphors. We will return to the question of what Moving Ego and Ego-centered Moving Time share in Section 7 on generic structure. Here is the schematic motion event with its four stages:
Schematic motion event
Stage 1: The Mover is distal from the Location and moving towards it.
Stage 2: The Mover is approaching the Location. (That is, The Mover is becoming proximal to the Location.)
Stage 3: The Mover arrives at and is passing the Location. (That is, The Mover becomes transiently co-located with the Location and begins to move away; i.e., begins to not be co-located.)
Stage 4: The Mover is distal from the Location and moving away from it.
To obtain a more concrete version of the schematic motion event/scenario, the reader can substitute either Ego or an entity moving relative to Ego for the Mover (as in Table 1 or 2 above).
As we continue, I will mention the relevant primary metaphor in parentheses. In the schematic motion scenario, getting close is the counterpart of becoming more immediate (immediacy is proximity), and becoming co-located – i.e., arriving – is the counterpart of the occurrence of a Time (occurrence is arrival). (I am using immediacy as a technical term to mean ‘soonness’; i.e., either soon before or soon after a temporal Ground.) Thus, spatial concepts systematically map onto temporal concepts, but since this is a motion scenario, time is involved in the spatial concepts. This is especially clear in the aspect of the scenario that depicts transience metaphorically as passing: in passing, as the Mover becomes co-located with the Location, it begins to move away (cf. Galton, Reference Galton2011, on transience). It should be clear at this point that what is at stake in understanding temporal metaphor is not whether space and time are similar. Nor does the analysis of metaphor attempt to explain time. Metaphor does make temporal concepts easier to consciously manipulate by mapping them onto concepts that have a sensory component (Grady, Reference Grady1997).
6.2.2. A static relation between primary Figure and primary Ground
In sequence is relative position on a path, the Figure is a Mover, and the primary Ground is also a Mover. The Figure and (primary) Ground are moving together, not relative to each other. The predicators in sequence is position expressions are well suited to expressing where an entity is located relative to another in an unchanging configuration. Such predicators include, for example, follow, be ahead, be in front. The mapping for sequence is position is in Table 3.
table 3. sequence is relative position on a path. Example: A period of calm followed the storm

Sequence is position expressions do more than tell us that two Times are not simultaneous; they also tell us which one was earlier or later. To the extent that they do this by presupposing direction on a Path, the information is not purely spatial, since the idea of a Path involves motion. However, in sequence is position the motion is not prominent. Rather, the motion is a feature of the background frame (or base; Langacker, Reference Langacker1987) relative to which the primary Figure and Ground are conceptualized. Although sequence is position does not profile change, this backgrounded motion corresponds to the understanding that Times are experienced as transient.
In addition to its temporal component, the notion of Path also has salient spatial structure. Specifically, the two ends of the Path differ from each other according to the direction of motion. Setting aside the notion of Path, direction in itself can be conceived of without motion or time. For example, my ‘line of sight’ gives me an instantaneous experience of direction. To summarize, we can isolate strictly spatial concepts in sequence is relative position on a path, but the full characterization of these concepts requires that we consider motion.
6.3. proximity
The concept of proximity functions in the metaphors in a way that is inferentially consistent with motion and location: if to be proximal is to be almost co-located, the metaphorical counterpart is to be almost simultaneous, as in (38b) Summer is approaching. Like location, proximity is a static idea. But while it makes sense to have a temporal mapping with static location as in (37) It snowed in the middle of May, proximity yields the right inferences only in a context of motion. For example, in The end of summer is near, we only get the inference that summer will end soon if metaphorical motion is involved.
6.4. the perceptive-interactive vs. derived ‘in-front/behind’ schemas
The later=in-front/earlier=behind pattern is motivated by Ego’s orientation and direction of motion, and also by her memory and expectations, as discussed in Section 4.1 on experiential motivation. The schema that gives rise to these characteristics can be called the perceptive-interactive in-front/behind schema (cf. Allan, Reference Allan1995). This schema divides the temporal universe into three regions: the Past behind Ego, the continuing Present at Ego’s changing Location, and the Future ahead of Ego. In (40a) we see an example in which the Time of an event is indicated by Ego’s bodily orientation, presumably motivated by the perceptive-interactive in-front/behind schema. To the extent that this schema is based on a moving Ego, it is dynamic. Example (40a) could also be structured by a static in-front/behind relation, as is also the case with (41). Whether examples like (40a) and (41) are understood as dynamic is an empirical question. (Cf. Lakoff & Johnson, Reference Lakoff and Johnson1999, p. 140 on the Time Orientation Metaphor.)
-
(40)
-
a. I had an experience back in 2002 that alerted me that there was such a thing as vaccine injury. [KPFA radio 19 June 2015. Italics added.] (Moving Ego)
-
b. The farther ahead we go, the more I understand.
-
Example (40b) shows that the ‘ahead’ direction is compatible with the expression of the Present as a continuing Time. In other words, the Present is given special treatment and depicted as having structure. Like (40b), example (41) expresses the Present as a locus of consciousness rather than just another Time.
-
(41) I’m looking forward to the match.
In contrast to the perceptive-interactive in-front/behind schema, we have also seen a mapping that uses a metaphorical in-front and behind derived from the relative positions of two entities that arrive in sequence (Section 5 on sequence is relative position on a path). We can call this the derived in-front/behind schema. This schema divides the temporal universe into two regions, ‘before’ and ‘after’, with no special treatment for Ego’s Now. The spatial relation that is mapped is essentially static, but with a background of motion, as discussed in Section 6.2.2 on sequence is position. The concepts of in-front and behind in this schema have to do with motion and location, and not with the front or back of any perceiving or interacting entity.
6.5. the significance of relative motion between primary Figure and primary Ground
Looking at the discussion so far, it will be noticed that relative motion between Figure and primary Ground occurs only in ego-perspective metaphors. This generalization is simple, but there is a type of apparent counter-example, represented by (23c) above (#As Christmas moves forward into the 21st century …), and by (42) below.
-
(42) Ramadan is getting closer to spring break every year. (This is because Ramadan is defined in a lunar calendar and spring break is defined in a solar calendar.)
Taken at face value, (42) has a Time moving relative to another Time. But (42) does not involve a mapping from ordinary motion to time. Rather, the metaphoric motion in (42) is analogous to pattern-path fictive motion (Talmy, Reference Talmy2000, p. 128) as in (43). Footnote 17
-
(43)
-
a. As I painted the ceiling, paint spots slowly progressed across the floor.
-
b. From noon to eight, the paint spots got closer to the radio every hour.
-
In (42), the Figure (Ramadan) changes Location relative to the Ground (spring break), but there is no Ego’s Now or decentered locus relative to which Ramadan is becoming more imminent. Thus (42) is not an instance of Ego-centered Moving Time. Instead, (42) is about successive occurrences of Ramadan as a temporal role instantiated on different days of the year in successive solar years (earlier each year); for example, Ramadan of 2014, Ramadan of 2015, etc. The most parsimonious analysis of (42) is that occurrences of Ramadan are construed as places via times are Locations (Section 6.1), and each of these places is metaphorically closer to spring break than the one in the preceding year (immediacy is proximity) (cf. Sweetser, Reference Sweetser1996, Reference Sweetser, Nuyts and Pederson1997). Thus the generalization holds that relative motion between primary Figure and primary Ground only occurs in ego perspective metaphors. This motion depicts Ego’s experience of time, as we will see in the following sections.
6.6. summary and conclusions to ‘spatial and temporal concepts in the metaphors’
We have identified one strictly spatial mapping: simultaneity is co-location. This mapping has immediacy is proximity as a kind of corollary, with the caveat that I do not know if people conceive of immediacy as proximity independently of motion. Additionally, we have identified sequence is relative position on a path as a metaphor that is primarily spatial but is structured by a background of motion or at least motivated by a motion scenario. The ego-perspective metaphors prominently involve motion, and the motion in turn highlights the spatial concepts of co-location, separation, and proximity.
We analyzed two different in-front/behind relations: a dynamic one in Moving Ego and a static one in sequence is position. These two in-front/behind relations are motivated in different scenarios that share virtually nothing except motion. All of the spatial concepts we have seen are involved to one degree or another in scenarios of motion. These scenarios range from the unbounded motion of Christmas is coming to the mere inference that motion has occurred, as in Summer is here.
7. Generic structure shared by source and target frames
The descriptions of the grounding scenarios emphasize the considerable shared structure between each scenario and the metaphor it motivates. Furthermore, the two ego-perspective metaphors and their grounding scenarios share structure with each other, and this structure contrasts with that of sequence is relative position on a path. In order to get a clearer picture of this generic structure, we will benefit by stating the metaphors as conceptual integration networks, also known as blends, in the theory of Fauconnier and Turner (Reference Fauconnier and Turner2002).
Conceptual integration networks are built with mental spaces, which are “partial structures that proliferate when we think and talk” (Fauconnier, Reference Fauconnier1997, p. 11), and allow us to organize and combine concepts in whatever ways are appropriate to current needs. Footnote 18 As Fauconnier and Turner (2002, p. 102) explain: “[M]ental spaces are small conceptual packets constructed as we think and talk for purposes of local understanding and action.” Mental spaces are structured by frames. A conceptual integration network integrates concepts from different input mental spaces into a blended mental space. In the case of metaphor, the source and target frames are inputs to the blend. The integration network includes a ‘generic mental space’ where we can state the structure that is shared by the source and target frames of the metaphor (cf. Grady, Reference Grady, Tyler, Kim and Takada2008, on ‘superschemas’).
For the purposes of the current paper, we can think of a conceptual integration network as a more explicit but otherwise equivalent way of stating a metaphor mapping, a way that includes more structure than the typical two-frame characterization. The discussion will follow the specific details of English, though much of the analysis also applies to other languages such as Wolof, Japanese, and Finnish that have broadly similar metaphor systems.
7.1. the generic structure of the ego-perspective metaphors
The ego-perspective metaphors share two kinds of generic structure: perspectival structure and aspectual structure. This structure is present in the source and target frames of each metaphor. The perspectival structure is realized as the presence of Ego in all four frames. This is represented in Tables 1 and 2 and in Figures 2 and 3 as the word here or now. Additionally the words deictic center are included as a kind of shorthand to indicate that each frame is organized around Ego’s situation. This organization obtains at all stages of each frame.

Fig. 2. Ego-centered Moving Time as a conceptual integration network.

Fig. 3. Moving Ego as a conceptual integration network.
The generic aspectual structure consists of the four stages identified in Section 6.2.1 for the schematic motion event. The stages are indicated in the Figures by the numbers 1, 2, 3, and 4, corresponding to the order of the stages. This aspectual structure can be thought of as X-schema (Execution schema) structure in the sense of Chang, Gildea, and Narayanan (Reference Chang, Gildea, Narayanan, Gernsbacher and Derry1998). Each element of the generic aspectual structure maps onto the element with the corresponding number in source and target frames of the metaphor. The generic aspectual stages are given here, and the stages of the schematic motion event are repeated below so the reader can see how each aspectual stage corresponds to a stage of the motion event.
Generic aspectual structure
Stage 1: Initial state.
Stage 2: Continuing process.
Stage 3: Culminating event (which continues).
Stage 4: Post state.
Schematic motion event
Stage 1: The Mover is distal from the Location and moving towards it.
Stage 2: The Mover is approaching the Location. (That is, the Mover is becoming proximal to the Location.)
Stage 3: The Mover arrives at and is passing the Location. (That is, the Mover becomes transiently co-located with the Location and begins to move away; i.e., begins to not be co-located.)
Stage 4: The Mover is distal from the Location and moving away from it.
In Figures 2 and 3, inputs 1 and 2 are the respective source and target frames of the metaphor. The relationship between these two frames is the same as it is typically analyzed in the standard two-frame representations of conceptual metaphors, with an arrow leading from each source-frame element to its target-frame counterpart. The addition of the generic space says that each element of the source-to-target pair is an instance of a generic stage. For example, the ‘Distal Mover headed toward Ego’s Location’ and ‘A Future Time’ instantiate the initial state (Stage 1) of the generic aspectual structure. In Stage 2, the approaching Mover in the source frame and the Time that is becoming more imminent in the target frame share a generic temporal structure of continuation with expected culmination. Solid undirected lines in the diagrams indicate mappings from the generic structure to the inputs. (Whether a line is straight or curved does not matter.) In all cases, mappings from motion to time are structured by a shared temporal component. Each generic stage maps onto the stage in both inputs that has the same number.
The blended space at the bottom of Figures 2 and 3 makes the metaphorical construal explicit. Dashed lines indicate mappings from the inputs to the blend. In each case, elements in the inputs map onto elements in the blend that have the same number (and instantiate the same stage of the event). The dashed lines are omitted from Figure 3 to simplify the diagram.
Moving Ego is represented in Figure 3. Most of the details are the same as those of Ego-centered Moving Time except that Ego is in the role of Mover, and Locations map onto Times. Other than that, the main difference in English is that the ‘passing’ phase can be talked about more easily in Ego-centered Moving Time than in Moving Ego, as shown in (44).
-
(44)
-
a. Sunday is passing slowly.
-
b. ?We are slowly passing Sunday.
-
c. The deadline is passing.
-
e. We are passing the deadline.
-
Table 4 shows how Moving Ego and Ego-centered Moving Time have the same generic aspectual structure. Although the table is reminiscent of a blending diagram, note that it is not possible to create a blend that combines both metaphors (Lakoff, Reference Lakoff and Ortony1993, p. 218). The current analysis highlights the observation that motion and ‘time passing’ share temporal structure; for example, the target-frame phenomenon of the Future Time becoming more imminent and the continued motion of the Mover toward the Location in the source-frame both instantiate the generic stage 2 continuing process. Additionally, by identifying the target-frame stages, I try to state in target-frame terms some of what is understood as ‘time passing’.
table 4. Moving Ego and Ego-centered Moving Time with their generic structure

Moving Ego and Ego-centered Moving Time contrast very neatly with sequence is relative position on a path. One contrast is that motion can be factored out of the source frame of sequence is position. By this I mean that if only the relation between primary Figure and primary Ground is considered, there is no motion (cf. Section 4.3). Motion cannot be factored out in the case of the ego-perspective metaphors.
7.2. the generic structure of ‘sequence is relative position on a path’
Before we discuss the generic structure there is something that should be made explicit about the analysis regarding the sequence is position grounding scenario and the use of in-front/behind terms to designate the anterior or posterior semantic relations. We need to consider two possibilities: (i) the use of in-front or behind evokes a metaphorical motion scenario; (ii) the expressions evoke a metaphoric in-front/behind relation that does not involve actual motion, but may involve fictive motion or scanning. This latter version has the mapping in Table 5. (Compare Table 3 in Section 6.)
table 5. sequence is relative position on a path (schematic version; Moore, Reference Moore 2014a, p. 149)

As one would expect, the generic structure (in Figure 4) generalizes over both versions of sequence is position (Tables 3 and 5). The generic structure of sequence is position consists of an ordered relation between two discrete entities. The structure can be iterated so that there are more than two entities, but the ahead/behind and earlier/later relations are essentially binary. This generic structure maps onto each input as suggested by Figure 4. The individual entities of the ordered relation are not specified in the generic structure because the source and target do not have the same kind of order. (The nature of this generic notion of order is a matter for future research.) A salient indication that motion is not a necessary ingredient of the formulation of sequence is position in Figure 4 is that the generic structure does not mention anything temporal.
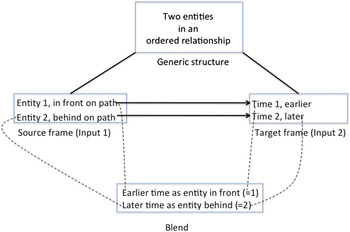
Fig. 4. Sequence is relative position on a path as a conceptual integration network.
To summarize: this analysis highlights the fundamental contrast between the ego-perspective metaphors with their single Mover moving relative to a Location and sequence is relative position on a path with its two Movers in a static relation to each other. The ego-perspective metaphors share considerable structure at the level of the schematic motion event. The generic structure of the ego-perspective metaphors is temporal, but that of sequence is position is not temporal.
8. Generic perspectival structure
This paper maintains a distinction between perspective and deixis in which perspective has to do with cognitive structure, and certain manifestations of perspective in language constitute deixis (see Section 3 for deixis). The shared perspectival structure between the source and target frames in the ego-perspective metaphors is prominent and essential: Ego plays a role in both the source and the target frames. It bears emphasis that the target frame of the ego perspective metaphors is structured by Ego’s Now independently of any metaphor.
The current analysis shows that the mapping from (Ego’s) Here to (Ego’s) Now in the ego-perspective metaphors is not just a cross-frame mapping. It is also, to a certain extent, a relation of identity between Ego in the source frame and Ego in the target frame. This is generic perspectival structure, but in a sense it is not abstract because it is a matter of a person’s (Ego’s) direct experience of current reality.
Generic perspectival structure is important theoretically because, though it is embodied, it is not necessarily spatial or temporal. A good example of this importance is the status of movement of Figure relative to primary Ground in motion metaphors of time – this metaphoric movement only occurs if one of the participants is Ego or Ego’s Location, as opposed to general experience, in which objects can move relative to other objects. Metaphoric motion of Figure relative to primary Ground can only depict Ego’s experience of change in immediacy (change in immediacy is change in proximity). This movement depicts Ego’s perspectival experience, not a relationship between space/motion and time.
Another example of a metaphor mapping that involves deictic principles has to do with proximal deictic forms in English. If an event in the immediate future is signaled with a deictic, it is the proximal form that is generally used – here in (45a) and this in (45b). (Cf. Lakoff Reference Lakoff1987, p. 484 on “Here comes the beep”.)
-
(45)
-
a. Here’s your number. (Said on the phone by someone who is about to give a number.)
-
b. This is what I’m going to do. (The speaker is about to say or do what she is going to do.)
-
The fact that the proximal rather than distal deictic tends to be used in cases like (45) is best explained in terms of the speaker making something available to the addressee, something which at speech time has not yet been available (Hanks, Reference Hanks1990). In other words, the speaker is presenting information to which she has access but the addressee does not. (According to Hanks, Reference Hanks1990, the linguistic facts in Yucatec Maya are similar.)
We see a loosely related deictic principle at work in space–motion metaphors of time. When English speakers speak of a Time/event that is close, as in (46), they are generally (but not necessarily) speaking about something that will happen soon, not about something that has just happened, even though in the mapping of proximity to immediacy, something that has just happened is equally proximal. Footnote 19
-
(46)
-
a. Friday is not far away.
-
b. The time to celebrate is near.
-
c. We are close to the end of the month.
-
An explanation for the meaning of the sentences in (46) has to appeal to specifically deictic and pragmatic principles in addition to metaphor mappings. I am not prepared to give a detailed account of this phenomenon here, but the principle seems to have to do with shared knowledge that a Time that is not only close but also approaching or being approached is a Time that will occur soon. If expressing the idea that the Time in question will occur soon is typically the motive for saying that it is close, it would make sense that Times which are said to be close are typically in the Future.
9. Inventory of primary metaphors
This section identifies the primary-metaphor components of Moving Ego and Ego-centered Moving Time. We have already seen in Section 6 that consideration of primaries helps with the analysis of spatial and temporal concepts, and for similar reasons the study of primaries facilitates cross-linguistic comparison. Additionally, analysis into primaries is interesting because it clarifies how the current analysis relates to other contemporary work in metaphor and blending (e.g., Dancygier & Sweetser, Reference Dancygier and Sweetser2014, Grady, Reference Grady, Tyler, Kim and Takada2008).
I will begin by restating Moving Ego and Ego-centered Moving Time in a way that de-emphasizes the stages and explicitly states the primary components that were discussed in a different context in Section 6 on spatial and temporal concepts. Table 6 compares the original statement of Ego-centered Moving Time with its equivalent restatement. In the restatement, submappings are stated in the most general way that is appropriate. A submapping may or may not correspond to a stage in the scenario.
table 6. Restatement of Ego-centered Moving Time to identify primary metaphor components (with original for comparison)

Now that we see how Ego-centered Moving Time can be restated, let us compare it with Moving Ego in Table 7, in order to see that the two metaphors have three primaries in common: now is here, (change in) immediacy is (change in) proximity, and the occurrence of a time is an arrival.
table 7. Restatement of Moving Ego to identify primary metaphor components

In order for Now is Here, immediacy is proximity, and the occurrence of a time is an arrival to qualify as primary metaphors, they have to have experiential bases and motivate linguistic expressions independently of the complete Moving Ego or Ego-centered Moving Time grounding scenarios. Let us look at each metaphor in turn.
The experiential motivation of Now is Here is that one’s experiences typically occur where one is located, and by definition they occur in the present (Grady, Reference Grady1997). Some examples of metaphoric expressions motivated by Now is Here are given below. (Also see the discussion in Section 6.1.)
-
(47)
-
a. Summer is here.
-
b. This is rattlesnake season. (The speaker points to the ground at his feet as he says the word ‘this’.)
-
The motivation for immediacy is proximity is that a moving entity that is close to you may be about to arrive where you are. Or, if you are moving, a place that is close may be a place where you are about to arrive. Or, in a scenario in which Ego is not involved, two Movers that are close together while going the same direction on the same Path will probably arrive at a given Location at almost the same time. Here are some examples of the metaphor:
-
(48)
-
a. The time to make the announcement is near.
-
b. Sunday is far away.
-
c. That was much closer to now. (Referring to a Time that was more recent than a previously mentioned Time.) [att. August 2001]
-
d. The sound of the crash followed closely after the skidding sound.
-
The motivation of change in immediacy is change in proximity is that the closer something gets, the sooner you expect it to arrive, or the closer you get to a Location the sooner you expect to arrive there. Here are some examples:
-
(49)
-
a. The end of summer is coming.
-
b. The end of summer is getting closer and closer every day.
-
c. As we get closer to the deadline, I will give you more details.
-
The examples in (49) would typically be analyzed as instantiating Moving Ego or Ego-centered Moving Time. This is compatible with the current analysis. The Moving-Ego/Ego-centered Moving Time analysis has a broader scope, placing the example in the context of the entire grounding scenario, whereas the analysis in terms of (change in) immediacy is (change in) proximity focuses on that one aspect of the scenario in which the Mover is getting close to the Location.
We have seen that (change in) immediacy is (change in) proximity combines with the ego-perspective metaphors, as in (49b), which is an instance of Ego-centered Moving Time. Additionally, immediacy is proximity combines with sequence is position as in (48d) and (50). The fact that immediacy is proximity combines with distinct metaphors, as in (49b) and (48d/50), supports the claim that immediacy is proximity is primary.
-
(50) The croak was followed closely by a splash. [Referring to frog noises.]
In addition to the primaries shared by Moving Ego and Ego-centered Moving Time, there are primary metaphors that they do not share, for example a Future Time is a Location ahead of ego. The motivations for these metaphors have been discussed in the literature in connection with the experiential bases of Moving Ego and Ego-centered Moving Time (e.g., Dancygier & Sweetser, Reference Dancygier and Sweetser2014, p. 169). The current account is consistent with those previous discussions.
Our discussion of Moving Ego, Ego-centered Moving Time, and sequence is relative position on a path has revealed a highly systematic set of mappings. In the final section before the conclusions I will push the analysis a little further.
10. The two-Mover hypothesis
The principles involved in the contrast between the ego-perspective metaphors versus the field-based metaphor can be further explored by looking at the conditions under which we find two Movers. In particular, I suggest that in all cases in which two Movers are semantic arguments of the same predicator and move in the same direction in the same frame of reference, the Mover that is more advanced on the Path will map onto the earlier Time. In other words, the hypothesis is that this set of conditions will always instantiate sequence is relative position on a path. Thus, the data should pattern as in (51): assuming that both events are construed as metaphorically moving entities, (51a) cannot mean that you fry the vegetables after you cut them. By the same token (51b) also cannot mean that you fry the vegetables after you cut them.
-
(51)
-
a. Stir frying the vegetables goes ahead of cutting them. [Bad on the interpretation that you stir fry them after you cut them.]
-
b. Cutting the vegetables follows stir frying them. [Also bad on the interpretation that you stir fry them after you cut them.]
-
The two-Mover constraint has been shown to hold in English (Moore, Reference Moore2014b) and Finnish (Huumo, Reference Huumo2015). There is also reason to believe that the constraint holds in Wolof and Japanese. Some details are given below. The tendency for in-front to map onto ‘earlier’ and behind to map onto ‘later’ in deictically neutral expression types is relevant to our current concerns because it could count as suggestive evidence for the two-Mover constraint, if a plausible motivation for the deictically neutral earlier=in-front/later=behind pattern is a motion scenario, as I have claimed in Section 5. For the same reasons, the earlier=in-front/later=behind pattern identified in Section 5 suggests that the two-Mover constraint could have important ramifications for how the in-front/behind dimension maps onto temporal concepts cross-linguistically. Now, let us look at data that bear on the two-Mover constraint, then finally consider a possible motivation for the constraint.
Predicators like English follow provide good evidence for the constraint because follow requires that both of its (semantic) arguments be moving in the same direction on the same Path, and in temporal uses the following event is later in all cases. Japanese has a similar construction with tuzuite ‘following’ (Moore, Reference Moore2011). Wolof (West Africa) has similar constructions with topp ‘follow’ and its converse jiitu ‘go ahead of’, exemplified in (52). (See also Moore, Reference Moore2014b.)
-
(52) Wolof
-
a. Noor moo topp ci tereet.
dry.season 3.subj.foc follow locprep trading.season
‘The dry season follows the trading season.’ [s L JTDOC:7]
-
b. Lolli moo jiitu tereet.
lolli 3.subj.foc go.ahead.of trading.season
‘Lolli precedes the trading season’ (Lolli is a season.)
[s L, 122397]
-
The two (semantic) arguments of the English predicator ahead may both be moving in the same direction, as in (53a), but not necessarily, as in (53b).
-
(53)
-
a. The black car was driving along ahead of the red car.
-
b. The road ahead should be smooth.
-
c. There was fierce campaigning ahead of the elections.
-
d. The weeks ahead should be interesting.
-
The source-frame configuration in which both arguments are moving (as in 53a) provides the basis for analyzing certain temporal examples with ahead as instantiating sequence is position, as in (53c) (see Section 4.3 above). However, since ahead also appears in a pattern where only the Ground is moving but the Figure is stationary (as in 53b), ahead can also function in the Moving Ego metaphor as in (53d).
Aspects of the polysemy of the Japanese predicator saki ‘point, tip, end, ahead, front, beyond’ are similar to the case of ahead. Among the uses of saki are one that instantiates sequence is position and another that instantiates a temporal translation relative frame of reference (see below). This polysemy pattern is consistent with what the two-Mover constraint would predict, although the pattern is also constrained by the particle that saki combines with (yori ‘than’ or kara ‘from’). This discussion, based on Shinohara and Pardeshi (Reference Shinohara and Pardeshi2011), considers only cases with yori. Footnote 20 Of interest is the type of Ground saki takes, either a Time in a culturally recognized sequence such as in (54a) or the Time of an arbitrary event like wiping the windows in (54b). (In 54a, the sequential position of the Bon Festival in the yearly calendar, like that of major holidays in general, is known to people in the culture.)
-
(54) Japanese
-
a. Obon yori saki ni yasumi o torimasu
Bon.Festival than front loc off.day acc take
‘(I) will take some days off before/after the Bon Festival’ [Shinohara & Pardeshi, Reference Shinohara and Pardeshi2011, p. 752. The Time of Obon is the Ground and the Time that days off are taken is the Figure.]
-
b. Madofuki yori saki ni furosooji o simasu
window.wiping than front loc bath.cleaning acc do
‘[I] will clean the bathroom before/*after wiping the windows.’ [Shinohara & Pardeshi, Reference Shinohara and Pardeshi2011, p. 753. The Time of wiping the windows is the Ground and the Time of cleaning the bathroom is the Figure.]
-
If the Ground is a culturally recognized member of a sequence, the Figure of saki can designate a Time that is either earlier than or later than the Ground, as in (54a), but if the Ground is an arbitrary Time, the Figure of saki can only designate a Time that is earlier than the Ground, as in (54b).
As exemplified in Moore (2014b, pp. 401ff.), saki has different spatial uses that can motivate the different temporal meanings in (54). Corresponding to the ‘after the Bon Festival’ meaning, there is a translation relative spatial use in which Ego transfers her orientation to the Ground, so that saki designates a Figure that is beyond the Ground (see Shinohara & Matsunaka, Reference Shinohara, Matsunaka, Evans and Chilton2010, p. 301). Footnote 21 Corresponding to the ‘before’ reading, saki has a use in which the Figure and Ground are both moving in the same direction, and the Figure is more advanced on the Path. This is the source frame of sequence is position.
Because saki is polysemous, we do not know for sure if the Times in the ‘earlier than’ reading are construed as moving, but the data are consistent with that hypothesis. Given the perspectivally neutral field-based frame of reference of sequence is position, we would expect the ‘earlier than’ reading to be unaffected by point of view, as is the case. By contrast, the requirement in the ‘later than’ reading that the Ground be a member of a culturally recognized sequence is consistent with a metaphorical analogue of the translation relative frame of reference, because a relative frame of reference requires the interlocutors to have a shared understanding of what perspective to take with respect to the Ground. In the temporal use, if the Ground is a member of a culturally recognized sequence, the interlocutors can share a perspective on it. (See Moore Reference Moore2014a, chapter 14, especially pp. 169 and 188.)
In a recent paper (on which the current discussion is based), Tuomas Huumo (Reference Huumo2015) has shown that Finnish conforms to the two-Mover constraint. Because of its case-marking system, Finnish offers excellent opportunities to track the status of participants in motion scenarios. Sentence (55a) is a motion example involving the projective adposition ete- ‘in front of, ahead of’ inflected for the addessive case (i.e., ede-llä). Crucially, this inflection on ete- indicates that both the Figure and the Ground are moving in the same direction. Sentence (55b) shows that, in sequence is relative position on a path, the adposition is inflected for case in the same way as it is in the motion example – with the suffix -llä. Thus the two metaphorical Movers are explicitly coded as both moving in the same direction.
-
(55) Finnish
-
a. Ambulanssi-n ede-llä ajo-i poliisiauto.
ambulance-gen front-ade drive-pst.3sg police.car
‘A police car was driving in front/ahead of the ambulance.’ (Huumo, Reference Huumo2015, p. 50) [Source frame for sequence is position. The police car is the Figure and the ambulance is the Ground.]
-
b. Hinna-t nouse-vat joulu-n ede-llä
price-pl rise-pres.3pl Christmas-gen front-ade
‘Prices rise ahead of Christmas.’ (Huumo, Reference Huumo2015, p. 57) [sequence is position. The Time of rising prices is the Figure, and Christmas is the Ground.]
-
Huumo discusses a range of adpositions, case inflections, and cognitive structures. We will content ourselves with one further pair of examples to demonstrate a contrast with (55). In (56a) we see an example of ete- ‘in front of, ahead of’ from the source frame of Moving Ego, and in (56b) an example of the metaphor. The inessive case marking on the adposition (-ssä) in this instance indicates that the Ground is moving while the Figure is stationary.
-
(56) Finnish
-
a. Lähesty-i-mme ede-ssä-mme häämöttä-v-i-ä
approach-pst-1pl front-ine-1plpx loom-prtc-pl-par
vuor-i-a
mountain-pl-par
‘We were approaching the mountains looming ahead of us.’ (Huumo, Reference Huumo2015, p. 50) [Source frame of Moving Ego. ‘We’ is the Ground and the mountains are the Figure.]
-
b. Kulje-mme kohti ede-ssä häämöttä-vä-ä kriisi-ä
move-pres-1pl towards front-ine lurk-prtc-par crisis-par
‘We are moving towards a crisis lurking ahead of us.’ (Huumo, Reference Huumo2015, p. 56) [Moving Ego. ‘We’ is the Ground and the crisis is the Figure.]
-
This discussion has shown that examples of sequence is relative position on a path can be found in languages from different language families in widely separated regions of the world. Some of the examples show unequivocally that the two Times are depicted metaphorically as two entities moving in the same direction, with the one that is more advanced mapping onto the earlier Time. Additionally, we have seen in Section 5 that there is a cross-linguistic tendency for an earlier Time in a sequence to be coded as being in front of a later Time in deictically neutral expression types. It is plausible that this tendency is motivated by sequence is position. It is further plausible that all of these data reflect a broader generalization about direction of metaphorical motion that I am calling the ‘two-Mover constraint’.
10.1. motivation for the two-mover constraint
At this point the question arises of why English and other languages have a primary-metaphor mapping with two Movers in which the Mover that is ahead maps onto an earlier Time, but no counterpart mapping with two Movers in which the Mover that is ahead maps onto a later Time. The proposed motivation for this situation has to do with the observation that a metaphorical Mover that goes from a region that maps onto an earlier Time toward a region that maps onto a later Time is understood as an evolving Present Time. In the experiential correlations that motivate primary mappings, there is only one Present moment, so there can be only one earlier-toward-later Mover in a primary metaphor under the conditions stated above for the two-Mover constraint. Metaphorical motion from later toward earlier is not restricted in this way.
Support for the claim that a metaphorical Mover that goes from earlier toward later tends to map onto Now was given in Section 4.1.1 above on ‘The contrasting metaphorical directions of motion in Moving Ego and Ego-centered Moving Time’. The essential idea is that English speakers understand processes to occur in the present and develop as Now gets later. In Section 4.2, we noted some cases in which the earlier-toward-later metaphorical direction does not strictly speaking involve Now as a frame element, as in (57) (repeated from above).
-
(57) The beans boiled from dawn to dusk.
Even though examples like (57) do not have the present moment as a frame element, it is still reasonable to assume that a conceptualizer’s understanding of a continuing Time evokes an experience of Now. The reason for assuming this has to do with the observation that examples like (57) involve a certain Time which progresses through the period in question, getting later as natural processes happen. The only way that I have of understanding this concept of the special Time during which processes happen is by analogy to my own experience of Now. Indeed, conceiving of the evolution of a process requires a Now because the conceptualizer has to conceive of successive overlapping states that evolve from earlier toward later, as in the example of the cooking eggplant in Section 4.1.1 (cf. James, Reference James1891, chapter 15; Langacker, Reference Langacker, Pecher and Zwaan2005). Instead of profiling that evolution, the earlier=in-front relation profiles a comparison between earlier and later Times. That is, such constructions (e.g., Spring follows winter) basically just tell us which one is earlier and which one is later. They deal with two or more different Times, not necessarily with the development or evolution of any process.
11. Summary and fundamental principles
The space–motion metaphors of time that we have studied tell us when a Time is by specifying the Path or Location of a spatial Figure relative to a spatial Ground. There are three ways that the metaphors do this: (i) the primary Figure moves relative to the primary Ground and Ego is associated with Figure or Ground, as in Christmas is approaching or We are approaching Christmas (ego-perspective frame of reference); (ii) the primary Figure does not move relative to the primary Ground and Ego is not necessarily involved, as in New Year’s follows Christmas (field-based frame of reference); (iii) the primary Figure does not move relative to the primary Ground, but the Figure–Ground relationship is structured by Ego’s point of view, as in I never go to bed beyond midnight (translation-relative variant of the ego-perspective frame of reference). This paper has studied the first two of these types of Figure–Ground relationship, with a focus on the contrast between ego-perspective and field-based frames of reference.
Frames of reference
I believe that the application of space-derived frames of reference to temporal concepts is the most important way that people apply spatial concepts to temporal experience. In order to say when something is, people can employ the relatively more elaborate and imageable ideas they have about how to say where things are.
The fundamental distinction in space-derived temporal frames of reference is between path-configured ego-perspective and path-configured field-based. In the canonical case of an ego-perspective frame of reference, either Ego is moving relative to a Location, or a Mover is moving relative to Ego’s Location. This means that Ego is locked into a perspectival relationship where she only has to consider one entity in addition to her own Location in order to determine her status vis-à-vis the frame of reference.
The path-configured field-based frame of reference involves an unchanging in-front/behind (or ahead/following) relation between the spatial Figure and Ground. This relation maps onto an unchanging earlier/later relation between Figure and Ground in the target frame. This frame of reference functions independently of Ego’s perspective.
Let me mention another characteristic that distinguishes the above two frames of reference. An ego-perspective frame of reference makes a distinction between three Times – Past, Present, Future – while the field-based frame of reference makes a distinction between only two: ‘before’ vs. ‘after’ (or ‘first’ vs. ‘next’). At first one might think that this is reminiscent of Levinson’s (Reference Levinson2003) observation that a relative frame of reference involves a ternary relation while the others involve a binary relation, but it is not the same idea. Although the ego-perspective frame of reference in principle divides the universe into three Times, in the simple cases only two entities (primary Figure and primary Ground) are needed to determine a given temporal relation; e.g., the relation between Present and Future. While it is true that an ego-perspective frame of reference may involve a ternary relation, as in I never go to bed beyond midnight (example 5), this is not a necessary feature of an ego-perspective frame of reference.
Motion, location, and metaphor mappings
We found three essential kinds of space-motion structure in the source frames. The structures are listed below with the frame of reference or metaphors they are found in.
-
a. Co-location vs. separation of two entities. (Ego-perspective and field-based; i.e. all cases)
-
b. Movement of a Mover towards or away from a Location. (Ego-perspective only)
-
c. In-front/behind relations. (Moving Ego and sequence is relative position on a path)
Relation (a) is purely spatial; relation (b) involves space and time; relation (c) involves space and time, but time may be backgrounded.
The above conceptual structures are involved in the mappings below:
-
α. Co-location maps onto simultaneity and separation maps onto non-simultaneity. In addition, proximity maps onto immediacy. These are primary metaphor mappings.
-
β. Movement of Figure relative to primary Ground is found only in the ego-perspective metaphors. Such movement maps onto changes involving the mappings listed in (α). For example, movement of the Mover towards the Location maps onto increasing immediacy/imminence. A special case is that in which the Mover arrives at the Ground. This arrival maps onto the occurrence of a Time. The fact that there is an event in the source frame, and events have a salient temporal component, shows that we are not dealing with ‘a domain of space’, although spatial concepts are structuring temporal ones.
-
γ. The in-front/behind relation maps onto the earlier/later relation in contrasting ways for Moving Ego vs. sequence is position. The motivations for these contrasting mappings reveal critical issues regarding how spatial and temporal concepts function in the metaphors.
In-front/behind and experiential bases
A complete analysis of metaphor structure includes analysis of experiential bases. We have analyzed experiential bases in the form of grounding scenarios. These are literal motion scenarios in which spatial and temporal concepts are structured in ways that are analogous to how the metaphors are structured. Experiential bases provide possible answers to some of the questions regarding why certain metaphors exist. One particularly good question is that of why there are two contrasting mappings of in-front/behind concepts onto temporal concepts in Moving Ego vs. sequence is relative position on a path.
The two contrasting mappings are motivated by two distinct kinds of in-front/behind experience. The mapping of in-front onto ‘later’ and behind onto ‘earlier’ is motivated by a scenario that has one Mover (Ego) and one elaborate event in which Ego expects to arrive at a Location that is ahead of her and then finally arrives and then passes it. Ego’s front is associated with her expectations, her forward motion, and the direction she faces. This motivates mapping in-front onto Future. According to this inference pattern, entities that are more advanced in the front direction correlate with later Times because the current Time gets later as an entity moves, and because Ego’s expected arrival Time is later for Locations that are more advanced in the front direction. This spatial notion of advancement and the temporal notion of getting later are both continuous gradations; i.e., they do not necessarily involve discrete steps or points.
The scenario that motivates the mapping of in-front onto ‘earlier’ and behind onto ‘later’ is radically different from the one just described. There is no Ego necessarily involved, no expectation or memory. Instead of an aspectually rich event involving change of location and arrival, there are two punctual events of arrival (see Section 4.3 above, and see below). The in-front-behind axis is determined strictly by direction of motion, and the metaphorical mapping is motivated by a simple correlation between the relative order of advancement of two entities on a Path and the order of arrivals. The earlier event is associated with the Mover that was in front and the later event is associated with the Mover that was behind. This relation holds between any two Movers. The in-front relation is a comparison between positions, and not a continuous gradation. Moreover, nothing necessarily projects a front if we analyze the direction of motion as a property of the Path. On this analysis, the in-front relation is a relation between positions on the Path, and the relation is defined by the front–behind structure of the Path, not by any intrinsic front of an entity.
It is tempting to think of the contrasting temporal meanings of in-front as if they were a matter of a single front schema pointed in different directions. But the study of grounding scenarios suggests that the different temporal meanings have to do with the different motivations just summarized. We can think of these motivations in terms of two contrasting schemas: the perceptive-interactive in-front vs. derived in-front schemas (Section 6.4). While these two schemas are related to each other by a family resemblance (Wittgenstein, Reference Wittgenstein1953) in which the shared feature is direction of motion, the two meanings of in-front are distinct from each other.
This idea of the derived in-front schema can be applied to a partial explanation of an unusual (in the literature) temporal front–behind mapping. Speakers of the South American language Aymara have a mapping in which the Past is in front of Ego and the Future is behind her (Núñez & Sweetser, Reference Núñez and Sweetser2006). This mapping is plausibly motivated by in-front/behind relations that are independently established by sequence is position. According to this hypothesis, Ego, metaphorically located at a Location that maps onto the current moment, assumes a position in the metaphorical in-front/behind order of Times. The Past is in front of Ego and the Future is behind her as a special case of earlier Times being in front of later Times in the sequence is position mapping. See Moore (2014a, chapter 12) for details.
The grounding scenarios of Moving Ego and Ego-centered Moving Time make satisfying accounts of experiential motivation because each element of each scenario has a counterpart in the corresponding metaphor. The proposed grounding scenario of sequence is position, in which one entity is ahead of another on a Path, is more speculative because the grounding scenario has events of arrival that do not map onto anything in the metaphor. In spite of this mismatch, the proposed grounding scenario is highly plausible.
Because the vocabulary of going-ahead/following is used in metaphorical expressions of sequence, we can assume two entities and a Path are involved in the conceptualization of those expressions. Next, there is a pervasive correlation in everyday experience between order of entities going somewhere on a Path and temporal order, including the order of events of departure and arrival. This correlation is evident among American English speakers as well as Senegalese Wolof speakers (Moore Reference Moore2014a, p. 77, example 19), and there is no obvious reason why a culture would not have it. Moreover, the correlation is salient because whoever arrives first has priority access to any resources that may be involved. Thus, the temporal meanings of the go-ahead/follow vocabulary are motivated. The proposed scenario is also a parsimonious account of how front can mean ‘earlier’ and behind can mean ‘later’. In fact, it is the only account that motivates the observed range of vocabulary in a perspectivally neutral way, thus accommodating the observed facts regarding deixis.
Another consideration to keep in mind regarding the plausibility of the proposed motivation is that metaphor (and mental-space) mappings are known to be selective. That is, only certain possibilities of frames are mapped; frames are not mapped in their entirety. For example, in the basic version of Ego-centered Moving Time, the Mover does not stop or change course. In addition to my proposed motivation for sequence is position, another example of a metaphor whose motivation includes a part of a scene that is not mapped might be causal relatedness is physical connection, as in ‘There’s a strong connection between grades and study habits’. As a motivation, Grady (1997, p. 290) proposes “The inference of causality from the joint motion (and ‘common fate’) of connected/contiguous objects”. This is a plausible motivation even though causal relatedness is physical connection does not necessarily involve motion.
The motivation of the ‘two-Mover constraint’
If my characterization of the contrast between ego-perspective and field-based metaphors is correct, we can see why there would be two Movers possible in the later-toward-earlier metaphorical direction but only one in the earlier-toward-later direction, on the condition that the claim is limited to metaphors that are (composed of) primary metaphors. The reason is that a metaphoric Mover in the earlier-toward-later direction involves a conception of the Present moment, and the experiential correlations that motivate the earlier-toward-later metaphorical direction involve only one Present moment per conceptualization. By contrast, in sequence is position (later-toward-earlier) we just have a comparison of Times, neither of which necessarily has properties of a Now. To put this claim in another way: a Time that moves from earlier toward later has properties of Now, whereas Times that move from later toward earlier are just Times. At the appropriate level of conceptual organization, there is only one Now, but there can be plenty of Times.
Moving Ego and Moving Time
The study of grounding scenarios also opens the door to recognition of structure shared between metaphors. This paper has shown in some detail how Moving Ego and Ego-centered Moving Time are Figure-Ground reversals of each other at the appropriate level of analysis. Some differences between the two metaphors have also been found. The earlier-toward-later metaphorical direction of motion in Moving Ego is a closer analogy to ordinary experience than the later-toward-earlier direction in Moving Time (= Ego-centered Moving Time and sequence is position), since a literal Mover reaches less advanced positions on a Path earlier, and more advanced positions later. That is, actual motion (like all events) has an earlier-toward-later ‘direction’. However, this state of affairs does not make Moving Ego a more natural or appropriate metaphor than Moving Time. In fact, Moving Time is sometimes more normal than Moving Ego, for example The passage of time is an ordinary phrase, while English does not have an analogous set-phrase like ‘The passage of Ego’, and The time that we have passed sounds novel.
I have not attempted to systematically identify differences in meaning or usage between Moving Ego and Ego-centered Moving Time, but I can suggest that one of the differences is that Ego-centered Moving Time is more appropriate for talking about how it feels for time to ‘pass’, as opposed to intersubjectively shared ideas of when times/events occur. For example, sentences (58a) and (58b) are both attested in the Contemporary Corpus of American English (COCA; Davies, Reference Davies2008), but I did not find anything like (58c) through (58f).
-
(58)
-
a. How the years rushed past! He met and loved to the best of his ability … [COCA, Fiction, 2002]
-
b. The years had drifted past as stealthily as a sailboat on a calm sea, gently and without fanfare. [COCA, Fiction, 2006]
-
c. ?He/we rushed past the years …
-
d. ?We drifted past the years …
-
e. ?We rushed through the final days of summer …
-
f. We drifted through the final days of summer …
-
To my intuition, (58f) is more likely than (58c) through (58e), but this intuition would need to be tested. If (58f) is indeed more likely to be attested in actual usage, this would suggest that one parameter would be the lack of control that people have over the rate at which time seems to lapse, since (58e) suggests that people can control the rate but (58f) does not. Another parameter is that examples such as (58c–58f), which have Ego as the Mover, suggest event structure; e.g., if (58e) were uttered in actual usage I imagine that it would mean that we rushed through some activities in the final days of summer. The use of the preposition through reinforces this sense that activity is involved. (See Huumo, Reference Huumo2013, for how prepositions contribute to metaphor structure; cf. Duffy & Feist, Reference Duffy and Feist2014, and Evans, Reference Evans2003, for more discussion of differences between Moving Ego and Ego-centered Moving Time.)
Generic structure
The brief analysis of generic perspectival structure in Section 8 suggests that there are principles of consciousness and human interaction that transcend space and time. In analyzing relationships between spatial and temporal concepts, we have to keep track of such principles; for example, the tendency for addressee-new information to be presented as proximal.
That there is a temporal (i.e., aspectual) generic structure shared by the source and target frames of the ego-perspective metaphors adds a new twist to the idea that ‘time is conceptualized in terms of space’ because space is more basic. There is an apparent conflict between the ideas that ‘space is more basic because it is (more easily) perceived’ and ‘time is more basic because it underlies all experience’ (cf. Langacker, Reference Langacker, Filipović and Jaszczolt2012). This conflict is avoided if we realize that the terms time and space are quite vague, so we should take care to use them at the appropriate level of generality, and specify which spatial or temporal concepts we are talking about when that is appropriate (cf. Einstein, Reference Einstein and Lawson1961, p. 10; Núñez & Cooperrider, Reference Núñez and Cooperrider2013). The other point to be emphasized here is that time and space do not always form an opposition, as in the case of motion, for which separating spatial and temporal aspects may not always be fruitful (Section 7).
The generic structure of sequence is relative position on a path is that of an ordered relation between two separate entities. Although the experiential motivation of sequence is position involves motion, it is not necessary to posit a temporal component to its generic structure, as long as we allow an atemporal concept of order (cf. Bottini & Casasanto, Reference Bottini and Casasanto2013; Walsh, Reference Walsh2003). This generic-level analysis helps highlight the contrast between the ego-perspective and field based metaphors.
Application of fundamental principles
The current paper has identified some fundamental principles that are valid for mapping space–motion concepts to temporal concepts, with a focus on English. The goal has been to develop specific claims about the concepts that are involved. For example, I have suggested how concepts like approach and arrive, or in-front and behind, have meaning when applied to temporal frames.
Knowing the meanings of words and other linguistic forms is not the same as knowing what a speaker is thinking at a given moment, but it is a prerequisite to describing what a speaker is thinking. Ways of talking show us a (not necessarily exhaustive) range of possibilities for construing temporal phenomena in terms of space and motion – possibilities for the speakers as well as for our own theories.
A good test of the principles we have studied in this paper would be to apply them to the question brought up in the ‘Introduction’ of what it means to say that time can be conceived of as going left-to-right or right-to-left, based on the evidence of co-speech gesture and experimental tasks such as card-arranging tasks (e.g., Casasanto & Bottini, Reference Casasanto, Bottini, Hölscher, Shipley, Belardinelli, Bateman and Newcombe2010, Fuhrman & Boroditsky, Reference Fuhrman and Boroditsky2010). This is a difficult and important question because the data suggest that people have a mental representation for time that is unrelated to what we would infer from most of what we find in the study of languages. I cannot actually deal with the issue here, but let me suggest how we might deal with it.
What we want to know is the temporal and perspectival meaning of the gestures: (i) What is the significance of the fact that the gesture goes laterally in the space in front of the speaker as opposed to sagittally or vertically? (ii) Do the concepts left and right have any temporal-semantic significance, or are the left–right and right–left directions equivalent (Moore, Reference Moore2012)? Is the lateral plane in front of the speaker just a convenient or neutral place to gesture (cf. Núñez & Cooperrider, Reference Núñez and Cooperrider2013)?
Approaching this problem in metaphor and blending theory, the first question is: What are the mappings? At this point we already see that the problem of gesture is not entirely analogous to the problem of spoken language. In spoken language we are concerned with a mapping from signified to signified (i.e., concept to concept), but in gesture we are additionally concerned with a mapping from signifier to signified, and exactly what this is must be specified. For example, the roles of position, motion, and direction in the gesture must be specified; Figure–Ground relations and frame of reference must be specified. Part of this problem is the question of which aspects of the gestures are significant; e.g., whether left and right are significant. One avenue of approach to the question of which aspects are significant would be to identify possible target-frame temporal concepts (e.g., ‘Now’) and see if there is anything that might map onto them.
Next we ask what the experiential motivation is. It is clear from the literature that one motivation is cultural conventions in the organization of symbolic artifacts like writing (e.g., Casasanto & Bottini, Reference Casasanto, Bottini, Hölscher, Shipley, Belardinelli, Bateman and Newcombe2010; Cooperrider & Núñez, Reference Cooperrider and Núñez2009; Núñez & Cooperrider, Reference Núñez and Cooperrider2013), since the direction of the gestures varies with the dominant writing direction in the culture in question. Is there more to be said about this motivation, or is it just a motor habit? The primary metaphors discussed in this paper should also be considered as motivations for the gestures; e.g., simultaneity is co-location, immediacy is proximity.
If right and left have a temporal meaning in the context of the gestures, we should be able to say what the meaning is, analogously to how we identified the perceptive-interactive and derived schemas of in-front/behind. And we should be able to say what we mean by direction, analogously to how we discussed the contrasting directions of Moving Ego and Moving Time. Then, how does perspective interact with the gestures (cf. Núñez & Cooperrider’s, Reference Núñez and Cooperrider2013, internal/external distinction)? Finally, when we formulate the mappings as a conceptual integration network, what is the generic structure? Some of these questions have been addressed in the literature, and some will be good topics for future research.
In this paper we have seen that space–motion metaphors of time are not about domains of time and space, and certainly not about similarities between time and space. They are not about trying to explain temporal phenomena in terms of spatial phenomena. They are about how temporal concepts such as succession, simultaneity, present, and future are elaborated in space–motion frames. This elaboration provides people with a rich, productive, and tightly constrained system for talking about temporal relations in terms of entities, locations, and motion. I hope that the detailed account in this paper will be usable in the task of formulating questions aimed at discovering how people use spatial notions to think about temporal concepts.











