1. INTRODUCTION
Threats related with consequences of marine collisions and disasters inevitably draw much attention to the problems of navigational safety. Statistics show that about 80% of collisions occur due to human errors. Some of these result from wrong assessment of a navigational situation and, consequently, wrong decisions. Navigational situation assessment is based on certain criteria: those resulting directly from regulations in force; and those resulting from navigators' knowledge and experience. The latter group of criteria includes the closest point of approach (CPA) and the time to the closest point of approach (TCPA). Other criteria are also proposed. These are based on pre-determined indicators of safety level and others using the concept of ship domain. Their determination is difficult due to a large number of factors, including the human factor, that have to be taken into consideration. This article presents the results of research on the determination of ship domain in open waters. The results are analyzed and compared with data found in the literature.
2. SHIP DOMAIN
Intuitively, the human being tends to have a certain area around him/her that should remain clear of other objects. In the case of ship navigation, that area is referred to as the ship domain. Any violation of the ship domain is interpreted as a threat to navigational safety. As the shape and size of ship domain depend on a number of factors, including the human factor, it is not easy to define such a domain, be it the open sea or a restricted area.
2.1. Definitions
One of the frequently quoted definitions of ship domain is that formulated by Goodwin (Goodwin, Reference Goodwin1975): “the surrounding effective waters which the navigator of a ship wants to keep clear of other ships or fixed objects”.
Adopting a certain level of relative bearing discretization (e.g. Δ RB=1°), the ship domain boundary B DS is defined by a curve joining n points p Di (i=1, 2, …, n), situated on headings RBi at distances d DRBi from the ship centre (e.g. centre of the waterplane) (Pietrzykowski, Reference Pietrzykowski2004):
The size of ship domain D S for each relative bearing is then described as follows:
It is important which method of defining the boundary of ship domain is adopted. This refers to the domain shape and size as well as its interpretation. Moreover, the concept of ship arena can be found in the literature (Davis, Dove, Stockel, Reference Davis, Dove and Stockel1980). The ship arena covers a larger area around the ship than its domain. A violation of a ship arena makes the navigator check whether the domain will be violated if the ships' courses and speeds are maintained. Earlier signalling of that fact means that actions can be taken sooner to avoid a potentially dangerous situation. This approach assumes distinguishing two zones around the ship, i.e. more detailed differentiation of navigational situation assessment.
Researchers propose two- or three-dimensional domains. The former include an area around the ship in the shape of a circle, rectangle, ellipsis, polygon or complex plane figure. Three-dimensional domains additionally account for ship's draft and air draft. These domains have a shape of a sphere, ellipsoid or cuboid. This article focuses on two-dimensional domains.
2.2. Fuzzy boundary of ship domain
The conventional definition of a ship domain assumes the division into two zones: dangerous and safe – ship domain and an area outside the domain, respectively. However, the human being tends to distinguish more than just two zones. These are described in linguistic terms: safe, less safe, dangerous, etc. Depending on the situation, the navigator tries to maintain the selected zone clear of other objects. Similarly, the navigator running the ship, depending on the situation, will attempt to maintain an area around his/her ship at a preset level of navigational danger (safety) that has to be clear of other vessels. In Zhao, Wu, Wang (Reference Zhao, Wu and Wang1993) a proposal was made to introduce the concept of a fuzzy boundary of ship domain, based on the theory of fuzzy sets (Zadeh, Reference Zadeh1965), (James, Reference James1986). The fuzzy set A defined in X can be presented as a set of pairs:
where μA(x): X→[0, 1] is the membership function which attributes a degree of membership to a given fuzzy set for each element of X. Unlike in a conventional set, apart from the complete membership (μA(x)=1, element belongs to a set) and a non-membership (μA(x)=0, element does not belong to a set) there is a concept of partial membership (0<μA(x)<1).
The fuzzy boundary of ship domain, proposed in Zhao, Wu, Wang, (Reference Zhao, Wu and Wang1993), bounds an area defined by the ship domain boundary and a line joining the points for which the function of membership to the set “safe distance” equals 0·5 (Figure 1). In this approach, a predicted violation of the area bounded by the ship domain fuzzy boundary forces the navigator to take action. This means that the navigator has to respond due to an increased risk of collision, i.e. the navigational safety has decreased below a certain preset limit. In terms of the fuzzy set theory we can say that the level of navigational safety is determined by the degree of membership of a navigational situation to the fuzzy set ‘safe navigational situation’ or briefly ‘safe navigation’.

Figure 1. Fuzzy boundary of ship domain. Source: (Zhao, Wu, Wang Reference Zhao, Wu and Wang1993).
2.3. Ship fuzzy domain
The definition of ship fuzzy domain (Pietrzykowski, Reference Pietrzykowski1999) extends and generalizes the fuzzy boundary of ship domain: an area surrounding the ship that the navigator should keep clear of other vessels and objects, whose shape and size depend on an adopted level of navigational safety.
According to the definition of a fuzzy set, the ship fuzzy domain D SF with the relative bearing RB i is described as follows:
where:
d RBi – distance from the ship's centre (e.g. centre of the waterplane) to another vessel on relative bearing RB i; d RBi∊〈0, ∞) [m]
μDSFRBi – function of membership to the set ‘dangerous navigation’ (identified as ‘dangerous distance’) on relative bearing RB i; μDSFRBi∊[0, 1];
If it is assumed that the ship fuzzy domain D SF on relative bearing RB i is described by the membership function μDSFRBi, the navigational safety level γ in a situation where another vessel is on that bearing at a distance d RBi is represented by this relationship:
Figure 2 presents a graphical interpretation of the ship fuzzy domain.

Figure 2. Fuzzy domain: (Left.) domain boundaries for various values of the navigational safety level γ (γ∊< 0, 1 >); γ=0 – very safe situation; γ=1 – very dangerous situation (collision); (Right) function of membership to the set ‘dangerous navigation’ on relative bearing RB i; μDSFRBi∊〈0, 1〉.
Taking the above into consideration, we can state that the presented definition of fuzzy domain:
• is in line with the previously presented definitions, i.e. it defines an area around the ship that should be clear of other vessels,
• extends the previous definitions of the domain by taking into account various values of navigational safety level (multi-grade scale), to which lingustic values can be assigned, such as very dangerous, dangerous, slightly safe, safe, very safe etc.
3. METHODS OF SHIP DOMAIN DETERMINATION
In practice, the application of the ship domain concept in a navigational situation assessment requires that its boundary is determined. Basically, three different methods are proposed: statistical, analytical and those using artificial intelligence tools. Due to a large number of various factors, the question of how to best determine a ship domain still remains without an unequivocal answer.
3.1. Description of ship domain determination methods
Originally, statistical methods were used for determining a ship domain. These consist in recording ships' movement trajectories and determining the areas around the ship that navigators keep clear of other vessels or objects. The density of tracks, or trajectories, was the basis for identifying the domain border. Ship domain boundaries were considered to be the lines of trajectory density ρ, corresponding to the maximum value of trajectory density in a given area. Some authors considered the domain boundary as the line around a ship determining an area for which the number of recorded tracks is greater than in the case of domain absence. Basic shortcomings of these methods are:
• necessity to record a sufficient amount of data;
• difficulties in separating the factors affecting the domain shape and size;
• description of the area around the ship that the navigator maintained clear of other vessels.
The third case means that the area of the determined domain is not the same as the area the navigator wants to keep clear of other vessels (the domain defined by Goodwin). This area is referred to as the effective domain (Fuji, Tanaka, Reference Fuji and Tanaka1971).
The ship domain is described by analytical methods with a number of more or less complex equations or equation systems. Analytical descriptions found in the literature present the size of rectangular and elliptical domains, as these allow determination of the length and breadth of the domain (Wawruch, Reference Wawruch1998), (Smierzchalski, Weintrit, Reference Fuji and Tanaka1999). The formulas describe the domain size as a function of its geometric dimensions and ship's speed in reference to other vessels. Analytical methods make it possible to describe the ship domain precisely. The major difficulty lies in the proper consideration of all essential factors affecting the domain shape and size, including the human factor.
The use of artificial intelligence methods allows the utilization of navigators' knowledge in the process of domain determination. This includes the non-procedural knowledge that results from professional experience. The acquisition and representation of that kind of knowledge is obtained by using, inter alia, artificial neural networks and fuzzy inference systems. The methods and tools of machine learning can also be employed. The basic inconvenience of these methods is the need to gather a proper number of learning sets, or the need to develop fuzzy rules of inference. In Pietrzykowski, (Reference Pietrzykowski1999), Pietrzykowski, Uriasz, (Reference Pietrzykowski and Uriasz2004) artificial neural networks with fuzzy logic were used for the domain determination. The advantage of these methods is the use of fuzzy logic tools (theory of fuzzy sets) for the formulation of inference rules and the tools of artificial neural networks in the learning process. The work by Zhu, Xu, Lin, (Reference Zhu, Xu and Lin2001) provides another example of an application of artificial neural networks.
3.2. Questions
Analyzing the domain definitions and methods of their determination the researcher may have a number of questions, such as:
• Should the domain describe the area the navigator intends to maintain clear of other vessels, or the area the navigator actually keeps clear of other vessels (the so called effective domain)?
• Which factors affecting the domain shape and size have to be accounted for while determining its boundary?
• Should a given situation be assessed by using a two-grade or multi-grade scale?
• Which method/s for domain determination is/are recommended for navigation in open sea or restricted areas?
An interesting discussion on issues included in the above questions can be found in the work by Zhao, Wu, Wang (Reference Zhao, Wu and Wang1993), where the domain shape and size are said to be affected by the following:
• human factor (knowledge, skills, nationality, mental and physical qualities),
• type of the area: open or restricted,
• size and type of own ship,
• movement parameters: relative speed of the other ship, traffic intensity,
• hydro-meteorological conditions,
• encounter type (ships encounters: in good visibility conditions the ships can be on opposite or crossing courses, overtaking),
• bearing on the approaching ship will affect the ship domain,
• size of the other ship.
The research results found in the literature do not fully answer these questions. Besides, these results do not make it possible to unequivocally identify the effect of particular factors on the domain shape and size. This is important for the practical application of the ship domain concept in the process of collision prevention and avoidance at sea, particularly in shipboard navigational decision support systems.
4. RESEARCH – STAGE 1
To answer the foregoing questions and solve the problems formulated in Section 3.2 calls for research on the subject, both in real (field) conditions and by using simulation methods. To this end expert research was conducted involving the assessment of ship encounter situations in the open sea in good visibility (Pietrzykowski, Uriasz, Reference Pietrzykowski and Uriasz2004). The participating navigators were captains and watch officers with varying diverse sea experience. In questionnaires, the navigators were supposed to specify safe distances for various scenarios including two ships: own and the target one. The two encountering ships had similar parameters – those of the m/s Freight (length overall 95·5 m, breadth 18·2 m, draft 5·5 m), proceeding at a speed of 15 knots).
4.1. Ship dynamic domain
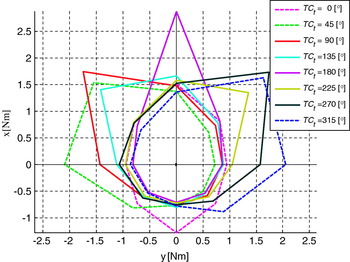
In the situations examined the two ships were proceeding on various courses. The results were used to determine the domain boundaries for various navigational situations (Figure 3). It is noticeable that the shape and size of the domain vary depending on the other ship's course. In this connection the domain is referred to as the ship dynamic domain D SD: i.e the domain accounting for parameters of the current ship encounter situation.

Figure 3. Ship domains in ship encounters for various courses of the other ship (own ship's course TC o=0°).
4.2. Ship domain
The dynamically changing shape and size of a fuzzy domain in a ship encounter may hinder assessment of the navigational situation. Therefore, the domains obtained were statistically averaged, with the average domain denoted D S. The expert research results also provided grounds for defining the minimum and maximum domains (Figure 4). In addition, the mean value of the closest point of approach CPAL (CPA mean) was calculated from those indicated by navigators during the research (Figure 5). The similarity of the shape and size of these determined areas in the forward part of the ship is notable.

Figure 4. Ship domain criterion.
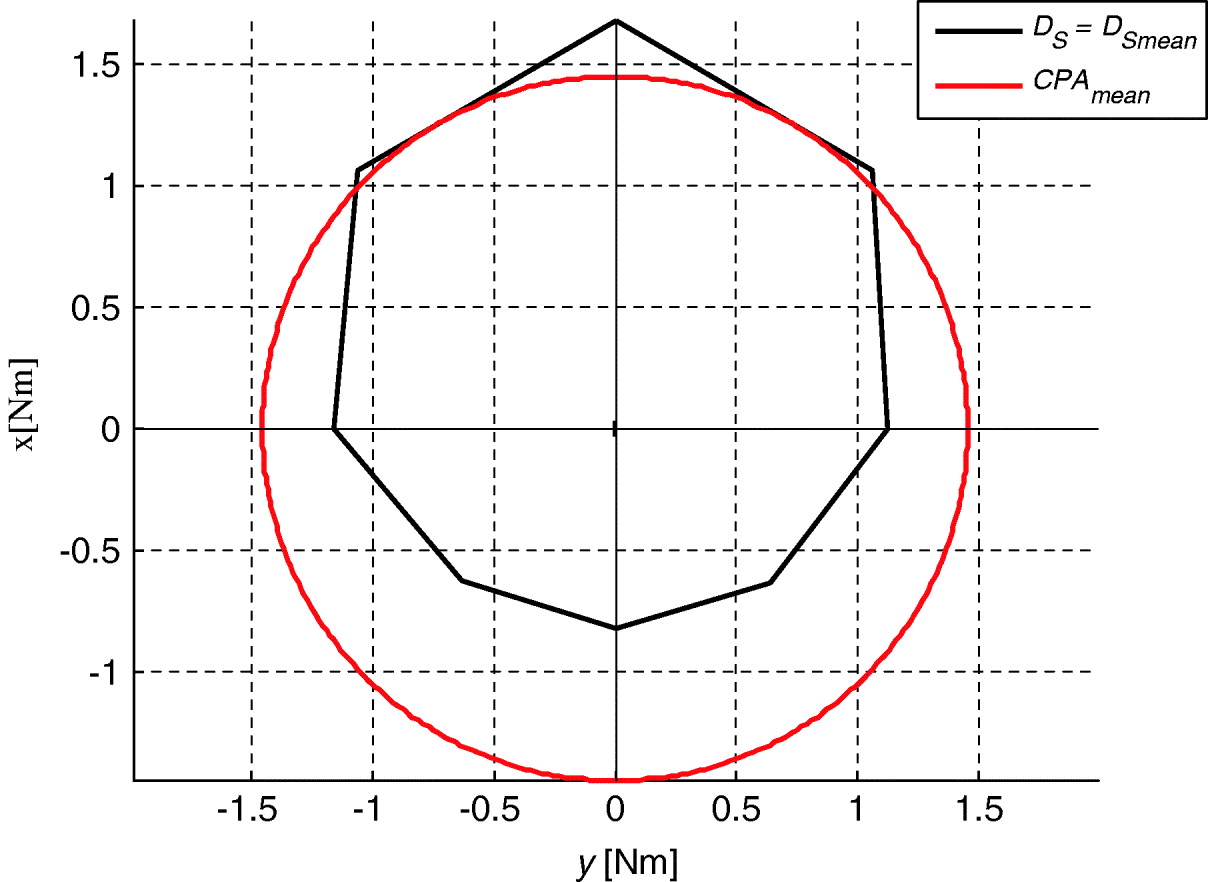
Figure 5. Criteria of navigational safety assessment: closest point of approach CPA L and ship domain DS.
4.3. Method for the determination of the ship fuzzy domain
Navigators' knowledge referring to the assessment of navigational situations makes a basis for determining the ship's fuzzy domain. Difficulties in its analytical description necessitate seeking other methods of knowledge acquisition and representation. One method leads to the use of artificial intelligence tools: artificial neural networks with fuzzy logic. These networks, after the learning process, enable the assessment of a situation with the use of criteria that navigators commonly apply.
It is assumed that the own ship's course TC o is 360°. The essential parameters adopted in situation assessment in an open sea area are as follows: distance to the other ship (d), relative bearing on the other ship (RB i) and the other ship's course (TC t). Furthemore, the following network structure has been adopted:
• three-dimensional (n=3) input vector x=[d, RB i, TC t]T,
• 27 (m=27) inference rules,
• single-element output vector of a navigational situation assessment (f(x)).
The research results provided a basis for developing learning data for the fuzzy logic neural network. These data made up input data x and corresponding assessments of the navigational situation, obtained by the method of psychological scaling, standardized to the interval [0, 1]. Then the network learning was conducted.
The network responses for various values of input variables are the values of navigational safety level γ. The network approximating properties made it possible to determine the navigational safety level γ for other encounter situations, not described in the gathered facts.
4.4. Ship dynamic fuzzy domain
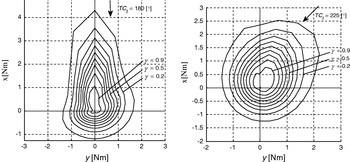
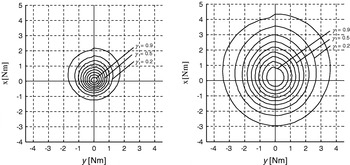
Figures 6 and 7 present network responses for various values of the input variables: distance to the other ship (d) and bearing (RB) on the other ship for some of its courses. These responses have a form of domains for various levels of navigational safety γ. By analogy to the dynamic domain (Section 4.1) this domain will be referred to as the ship dynamic fuzzy domain DSDF. Figure 6 illustrates the fuzzy domain with the discretization step of the relative bearing on the other ship ΔRB=45°, which corresponds to the discretization step of ship (non-fuzzy) domain D S. Figure 7 presents fuzzy domains for the discretization step for the relative bearing on the other ship ΔRB=15°.

Figure 6. Dynamic fuzzy domain D SDF for various values of navigational safety level γ and various courses of the other ship TCt: Left) 180°; Right) 225°; own ship's course 360°; discretization step of the relative bearing on the other ship ΔRB=45°.

Figure 7. Dynamic fuzzy domain D SDF for various values of navigational safety level γ and various courses of the other ship TC t: Left) 180°; Right) 225°; own ship's course 360°; discretization step of the relative bearing on the other ship ΔRB=15°.
As in the case of determined dynamic domains D SD (section 4.1), there is a characteristic diversification of dynamic fuzzy domain shapes depending on the other ship's course. In this case as well the dynamically changing shape and size of the fuzzy domain in ship encounter situations may hinder assessment of a navigational situation.
4.5. Ship fuzzy domain
For the above mentioned reasons, the average ship fuzzy domain DSF was determined similarly to the (non-fuzzy) ship domain DS (cf. section 4.2). To do this, psychological scaling of the gathered facts was conducted again, followed by neural network learning. Figure 8 depicts the obtained fuzzy domain for various values of the navigational safety level γ.
Figure 8. Ship fuzzy domain D SF for various values of navigational safety level γ.
By examining the results obtained one can find out that the shapes and sizes of the maximum (non-fuzzy) ship domain D S and the fuzzy domain D SF for the navigational safety level γ=0·1 are comparable. The (non-fuzzy) minimum ship domain D Smin (Figure 4) corresponds to the fuzzy domain D SF for the navigational safety level γ=0·5 (Figure 9). One can see (Figure 9) that the fuzzy domain areas have a roughly circular shape for the indicated safety levels and that they are asymmetrical relative to the ship.

Figure 9. Comparison of non-fuzzy and fuzzy domains.
4.6. Asymmetry of the ship fuzzy domain
The centres of the domain areas were identified by numerical methods. Figure 10 presents the values of the centre shifts in relation to own ship's waterplane centre. They clearly show that the fuzzy domain is asymmetric (cf. Zhao, Wu, Wang Reference Zhao, Wu and Wang1993). Figure 11 displays the determined and fuzzy domain boundaries approximated to circles so that the areas within particular fuzzy domains are maintained the same. A detailed analysis of this phenomenon, however, requires further research.

Figure 10. Shifts of the centres of the areas determined by fuzzy domain boundaries relative to the own ship waterplane centre.

Figure 11. Ship fuzzy domains – determined and approximated – for various values of the navigational safety level γ.
5. RESEARCH – STAGE 2
The second stage of research covered encounters of ships with lengths overall, respectively: 100, 200 and 300 m (Pietrzykowski, Uriasz Reference Pietrzykowski and Uriasz2005, Reference Pietrzykowski and Uriasz2006). It was assumed that the ships proceeded at the same speed of 15 knots. Expert research was conducted in which ship-encounter situations in an open sea area were assessed in good visibility conditions. As in stage 1, the participants were navigators, both captains and watch officers whose experience at sea varied. The research took the form of questionnaires. The navigators were expected to determine safe distances for various encounter scenarios including own and the other ship.
More than 10 000 facts describing various navigational situations were gathered, i.e. various ships' positions in relation to each other. Each situation was described with the following parameters:
• the other ship's course (own ship's course TC o=360°),
• relative bearing on the other ship RB,
• distance between the two ships that the navigator considered as safe in a given situation.
The facts were then analyzed. The methods mentioned in Section 1 were used for determining the criteria for navigational situation assessment. The following assessment criteria were considered on the basis of ship domain and ship fuzzy domain.
5.1. Ship dynamic domains
Ship dynamic domains were defined from the gathered facts. These domains reflect navigators' expectations as to how large the clear area around the ship should be. When another ship enters this area or zone, it means that the ship's safety may be threatened so the navigator should take appropriate decisions. It was found that the domain size and shape depend on the parameters of both own and the other ship and the other ship's course (Figure 12).

Figure 12. Ship dynamic domain D SD: various courses of the other ship (own ship's course TC o=360°). Left: both ships are 100 metres long; Right: both ships are 300 metres long.
5.2. Ship domains
Similar to the first stage of the research, all the domains obtained were statistically processed to yield average domains D S, each for varied lengths of the ships involved. It can be clearly seen that the navigators had a tendency to increase the domain (using other criteria) when the other ship's size was larger (Figure 13).

Figure 13. Ship domains D S, Other ship of various lengths: 100, 200, 300 m. Left: own ship length 100 m; Right: own ship length 300 m.
It was found that the navigators had used various criteria for the assessment of navigational situations. Which of the criteria were used depended on both ships' sizes. As a result, the assumed safe areas around the ship (domains) differed in size. The domain size is positively correlated with the own and other ships' size. This raises the question whether the assumption of one specific value of CPAL in shipboard anti-collision systems corresponds to actual behaviour of the navigator.
5.3. Domains of encountering ships
Interesting observations are made while analyzing domains of encountering ships of different sizes. The navigator on each of the two ships determines his/her own ship's domain D S. It seems that the navigator takes into account the other ship's size. For this purpose, ship domains of ships having lengths, respectively, 100, 200 and 300 m were compared for situations when the encountered ship was of a different length. The domains were found to be very similar in size and shape (Figure 14). For instance, when the encountered ships were, respectively, 200 and 300 m long, the 200-metre ship's domain is similar in shape and size to that of the other ship. This confirms the hypothesis that both navigators take into account the parameters of the other ship.

Figure 14. Domains of ships (D S) 100 m, 200 m and 300 m in length for mutual encounter situations.
5.4. Dynamic fuzzy domains
Dynamic fuzzy domains DSDF were determined with artificial intelligence methods and tools. Neural networks with fuzzy logic were used for the knowledge extraction and representation, similarly to the research in Stage 1. Examples of dynamic fuzzy domains DSDF for various courses of the other ship (own ship's course 360°) are presented in Figure 15.

Figure 15. Dynamic fuzzy domain D SDF of a 300 m ship (course 360°) in an encounter with a ship of the same length (discretization step 45°): Left: other ship course TC t=180°; Right: other ship course TC t=270°.
5.5. Ship fuzzy domains
Examples of averaged fuzzy domains D SF (the other ship course not considered) for ships 300 m and 100 m long are shown in Figure 16.

Figure. 16. Ship fuzzy domain D SF: Left: 300 m ship encounters a ship of the same length; Right: 100 m ship long encounters a ship of the same length.
6. CONCLUSIONS
The ship domain makes up a universal criterion for the assessment of a current navigational situation. Various forms of domain are in use (shape, size, type), which is confirmed by the navigational practice. The general form of a domain applied by the navigator in the process of navigational situation assessment depends on such factors as owner's intructions, captain's orders or the ISM Code. For this reason even two sister ships may be applying different domains.
A few specific questions formulated in this article (Section 3.2) refer to a general problem. Is it possible to create one universal domain? The results of research so far raise the expectation that it is feasible (Sections 4 and 5). We may predict that it will be a domain of variable shape and size, taking into account the types, sizes, manoeuvring parameters and speeds of the own and encountered ships, the type of area (restricted or open), prevailing conditions (good or poor visibility), sources of information and its credibility, etc.
Such a domain should be implemented as a default domain in shipboard and shore based integrated navigational systems. Use of the domain will control the safety of navigation as well as estimate navigational risk and determine a safe trajectory of the ship. In addition, it will be possible to specify the moment to commence a planned anti-collision manoeuvre.
Collisions are the major cause of shipping losses. According to (Gale, Patraiko Reference Gale and Patraiko2007) 24% of the collisions are due to incorrect assessment, 23% are caused by improper observations while in 13% of the cases navigators were not aware of danger. These causes can be eliminated or at least reduced by the implementation of ship domains; this would enhance the safety of navigation.