1. INTRODUCTION
Submersibles are vehicles that are indispensable for entering the deep sea to conduct scientific research and investigation (Liu et al., Reference Liu, Wang and Wang2012; Martin, Reference Martin2013; Schilling, Reference Schilling2013; Bergman, Reference Bergman2012; Moorhouse, Reference Moorhouse2015). They are divided into unmanned and manned vessels. In terms of working depth range, manned submersibles can be divided into deep-diving and medium/shallow-water types, whereas in terms of application, they can be divided into research, operational, sightseeing adventure and military types. Operational deep diving manned submersibles have become important underwater vehicles that provide strong technical support for the development of the international deep-sea industry. Since the launch of the manned submersible Alvin by the USA in the 1960s, deep-sea manned submersibles have been used in almost all major international discoveries and scientific achievements in the deep sea as well as in the implementation of difficult underwater projects (Liu et al., Reference Liu, Ding and Shi2015).
This paper briefly describes six operational deep-sea manned submersibles that can dive to depths of more than 4,500 m. Then, the paper focuses on the navigation and positioning technologies used in these submersibles. Finally, considering the existing problems in the navigation and positioning systems of deep-sea manned submersibles, the paper discusses future development trends of the navigation and positioning technologies used in operational deep-sea manned submersibles.
2. OPERATIONAL DEEP-SEA MANNED SUBMERSIBLES
According to the statistics provided by the International Manned Submersible Committee, there were 46 active manned submersibles in 2015 (Kohnen, Reference Kohnen2013; Liu, Reference Liu2016). These included six operational deep-sea manned submersibles capable of diving to depths of more than 4,500 m (Table 1): Alvin (United States, 4,500 m), Nautile (France, 6,000 m), Mir-1 and Mir-2 (Russia, 6,000 m), Shinkai 6500 (Japan, 6,500 m), and Jiaolong (China, 7,000 m) (Cui et al., Reference Cui, Hu and Ye2011). Since the 1960s, these operational manned submersibles have been widely used for deep-sea scientific research, resource surveys, salvage, rescue and national security. So far, they have reached continental slopes, seamount depths of 2,000–4,000 m, underwater craters, mid-ocean ridges and ocean floor depths of 6,000 m. They have also reached depths of more than 6,500 m in the Yap and Mariana Trenches. Scientists have obtained a large number of geological, sedimentary, biological and geochemical samples and made many scientific achievements that have attracted worldwide attention (Singh et al., Reference Singh, Whitcomb and Yoerger2000).
Table 1. Comparison of six active operational deep-sea manned submersibles

Note: WHOI: Woods Hole Oceanographic Institution; IFREMER: French Research Institute for Exploitation of the Sea; PPSI: P.P. Shirshov Institute of Oceanology of the Russian Academy of Sciences; JAMSTEC: Japan Agency for Marine-Earth Science and Technology; NDSC: National Deep Sea Center of China.
2.1. Alvin
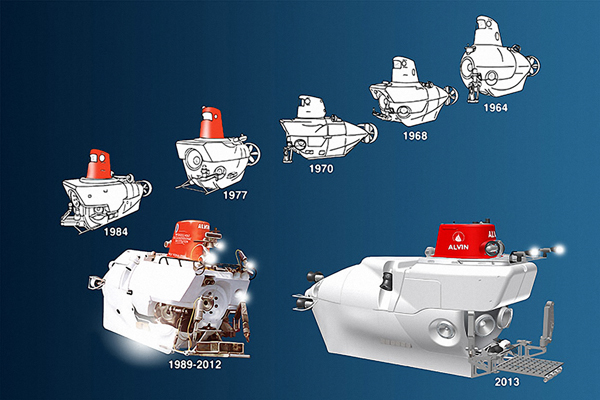
Alvin (Figure 1) is currently the world's most famous deep-sea exploration vehicle. It belongs to the United States (US) Navy and is operated by the Woods Hole Oceanographic Institution (WHOI). Although Alvin was not the first manned submersible, it was the first to prove the usefulness of manned submersibles in scientific research, convincing people to change the way they thought about the oceans and compelling scientists to change their research methods. Alvin enabled American scientists to carry out revolutionary deep-sea exploration, including regular research into the seabed, mid-ocean ridges and hydrothermal vents. One of the remarkable research discoveries has been the detection of strange marine life in the hydrothermal vents; this marine life is now being considered as a clue to the origin of life on Earth.
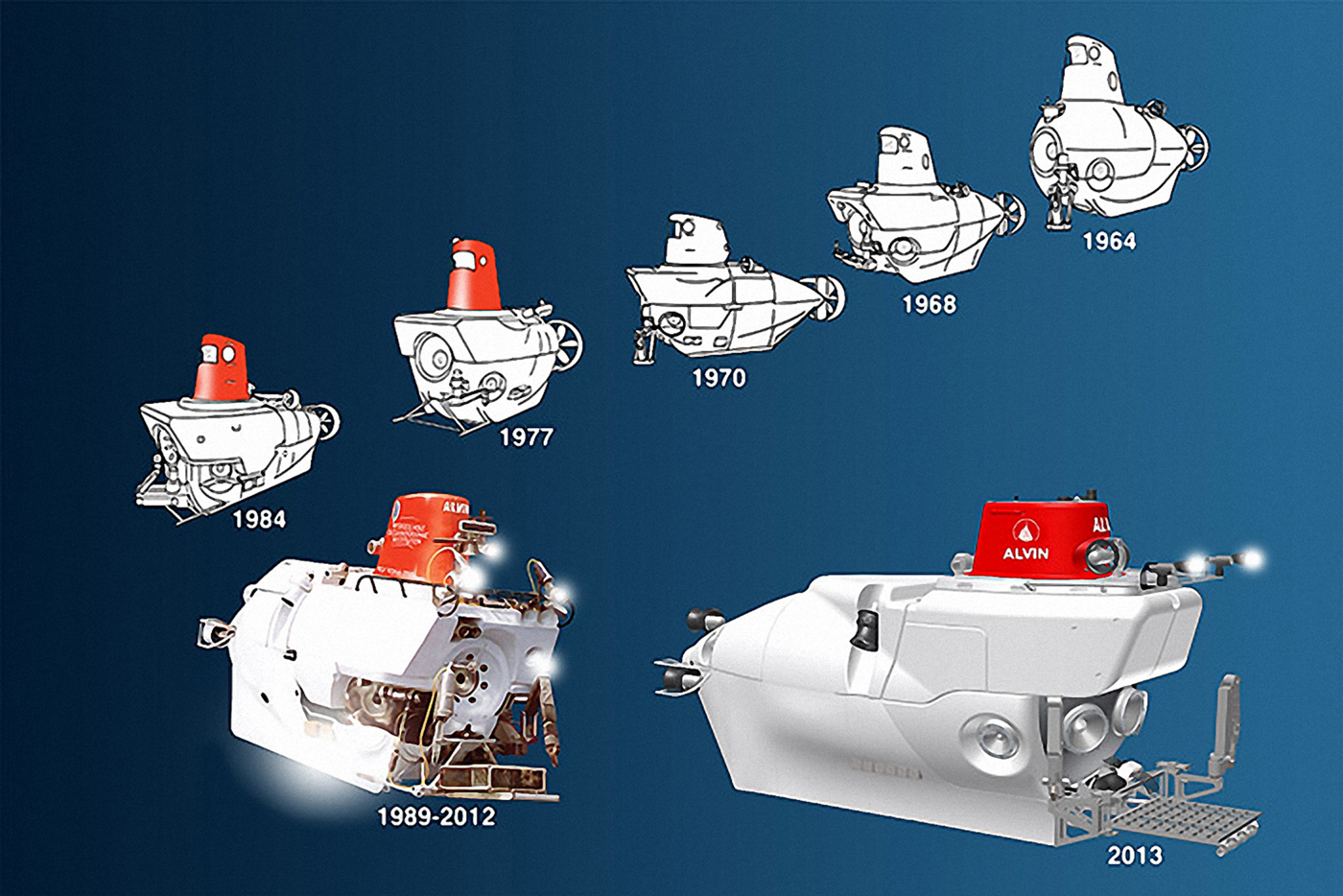
Figure 1. Different stages of development of Alvin.
Over the past half century, most of the important marine scientific discoveries have involved the participation of Alvin. It has helped the US Air Force to search for lost hydrogen bombs, it has enabled geologists to determine the formation of the oceanic crust, discover deep-sea hydrothermal vents and judge the relevant ecological environment according to the internal chemical energy of the Earth without relying on solar energy.
On 26 June 1964 Alvin completed its first test dive, reaching a maximum depth of 1,829 m. In 1972, Alvin was equipped with a new titanium casing and increased its diving depth to 3,658 m. In 1994, it reached a depth of 4,500 m. Alvin is neither the latest manned submersible nor the one that can reach the greatest depth, but it has the greatest number of dives (approximately 12,000 people have participated in more than 4,800 dives, which exceeds the total number of dives from other manned submersibles combined) and has the longest cumulative seabed stay duration (more than 16,000 h). With a current average of 175 dives per year, Alvin has a reliability record greater than 95% over the past 20 years, with the remaining percentage lost mainly due to surface bad weather.
Alvin is regularly maintained and is refurbished every few years (WHOI, 2019). For example, on the thirtieth anniversary of its completion, all its main parts were completely replaced. At the turn of the century, the United States believed that Alvin had to be fully upgraded considering global strategic requirements and demands of deep-sea resource exploration. After repeated deliberation, the upgrade of Alvin was planned to be undertaken in two phases. In 2011–2013, under the auspices of the National Science Foundation, the first phase of the upgrade was completed, and a scientific verification dive was launched in the Gulf of Mexico in 2014. The second phase of the upgrade was aimed at increasing the dive depth to 6,500 m and enabling Alvin to detect 98% of the seabed. In addition, this phase aimed to increase battery capacity and seabed operating time and to improve hydraulic equipment and manipulator performance, thruster power, manoeuvrability and research capabilities in the middle water layer.
2.2. Nautile
The manned submersible Nautile (Figure 2) is operated by the French Research Institute for Exploitation of the Sea (IFREMER) and was the first new-generation 6,000 m manned submersible. It was designed and manufactured by IFREMER and the French Navy and was originally intended for conducting basic scientific research in different deep-sea areas. In 1984, Nautile conducted its first sea trial. In 1985, during a dive test, Nautile dived to a depth of 6,600 m, after which it started receiving many new projects. Since its introduction in 1984, Nautile has undertaken 37 voyages and has dived more than 1,850 times. From 1984 to 1999, Nautile dived an average of 100 times a year. From 1987 to 1998, Nautile performed 116 dives on the Titanic wreck, and conducted early hydrothermal studies (Vincent, Reference Vincent2013).
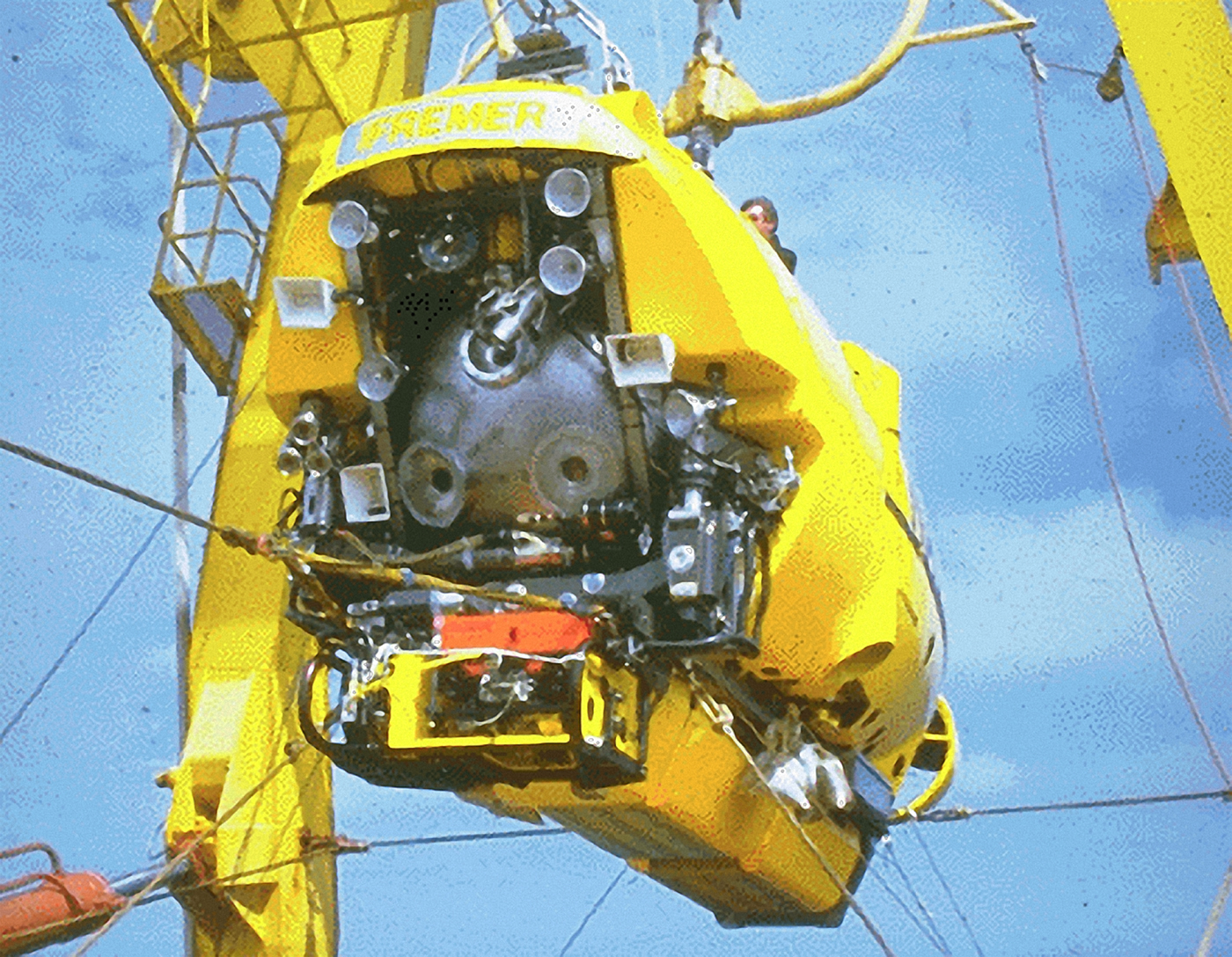
Figure 2. Nautile.
2.3. Mir-1/Mir-2
The manned submersibles Mir-1 and Mir-2 (Figure 3) are operated by the P.P. Shirshov Institute of Oceanology of the Russian Academy of Sciences (PPSI). They were jointly developed by the Soviet Academy of Sciences and the Rauma Raepola Oy Company of Finland in 1987. They are the only two submersibles made of martensitic steel, creating a manned spherical shell with a wall thickness of 5 cm. These two manned submersibles represent the forefront of underwater exploration; they can reach a dive depth of 6,000 m (equivalent to two thirds of the height of Mount Everest) and can cover 98% of the seabed. The major features of these two submersibles are that they have sufficient energy to stay underwater for 17–20 hours and can perform small remotely operated vehicle operations. To date, Mir-1 and Mir-2 have carried out 39 voyages worldwide (with more than 1,100 accumulated dives), including 16 scientific voyages, seven filming voyages, seven national safety voyages, five underwater sightseeing voyages and four salvage voyages (Sagalevitch, Reference Sagalevitch2012).

Figure 3. Mir-1 and Mir-2.
Like all manned submersibles, Mir-1 and Mir-2 are deployed and reclaimed by a support mothership (Akademik Mstislav Keldysh). It is noteworthy that the two submersibles can be mounted on the same support mothership and can be used for cooperative or replacement work. For example, if one of the submersibles working on the seabed becomes stuck, the second submersible could be immediately deployed to rescue the first submersible. As another example, some research projects and special tasks such as lighting for shipwrecks benefit from the synergetic functioning of the two submersibles.
2.4. Shinkai 6500
In the 1970s, Japan established the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) and sought deep-sea exploration technology from the West. In 1973, Japanese engineers visited the WHOI and closely observed Alvin. After extensive experimental research, Japan built the manned submersible Shinkai 2000 with a dive depth of 2,000 m in 1981. Further, Japan built the manned submersible Shinkai 6500 (Figure 4) with a dive depth of 6,500 m in 1989, which makes it capable of investigating 98% of the world's seabed. Shinkai 6500 can operate underwater for eight hours and has once dived to a depth of 6,527 m, although this record was broken by the manned submersible Jiaolong in 2012. On 15 March 2007, Shinkai 6500 completed its one thousandth dive. So far, Shinkai 6500 has carried more than 800 scientists as part of its dive operations (Komuku et al., Reference Komuku, Matsumoto and Imai2007).

Figure 4. Shinkai 6500.
2.5. Jiaolong
The development of the manned submersible Jiaolong (Figure 5) is one of the major special projects of the National 863 Program. From August 2009 to July 2012, 1,000 m, 3,000 m, 5,000 m and 7,000 m sea trials were completed; the submersible reached a maximum dive depth of 7,062 m (Cui et al., Reference Cui, Liu and Hu2012), enabling it to cover 99.8% of the ocean's area. After successfully completing the 7,000 m sea trial, Jiaolong was transferred to handle experimental applications. From 2013 to 2017, Jiaolong completed four experimental application voyages and carried out 100 dive operations in the South China Sea, Pacific Ocean and Indian Ocean. It collected a large number of biological, rock and sediment samples and obtained a large amount of high-definition video data, fine topographical data and in-situ detection data. So far, Jiaolong has completed 160 dives. To ensure that Jiaolong is equipped with advanced features, it began undergoing a two-year upgrade from the end of 2017.

Figure 5. Jiaolong.
3. NAVIGATION AND POSITIONING OF OPERATIONAL DEEP-SEA MANNED SUBMERSIBLES
3.1. Alvin
Alvin's navigation and positioning system includes the Global Positioning System (GPS); an iXblue fibre optic gyroscope Octans; a depth sensor; a conductivity, temperature, and depth (pressure) sensor; an altimeter; a Teledyne Research Development International (RDI) Workhorse 600-kHz Doppler Velocity Log (DVL); a Sonardyne Ultra-Short Baseline (USBL) system; a Sonardyne Homer Pro location beacon; an auxiliary Long Baseline (LBL) acoustic positioning system and an in-cabin dedicated navigation system with a touchscreen (DVL Navigation, called DVLNAV) (Eustice et al., Reference Eustice, Singh and Whitcomb2011).
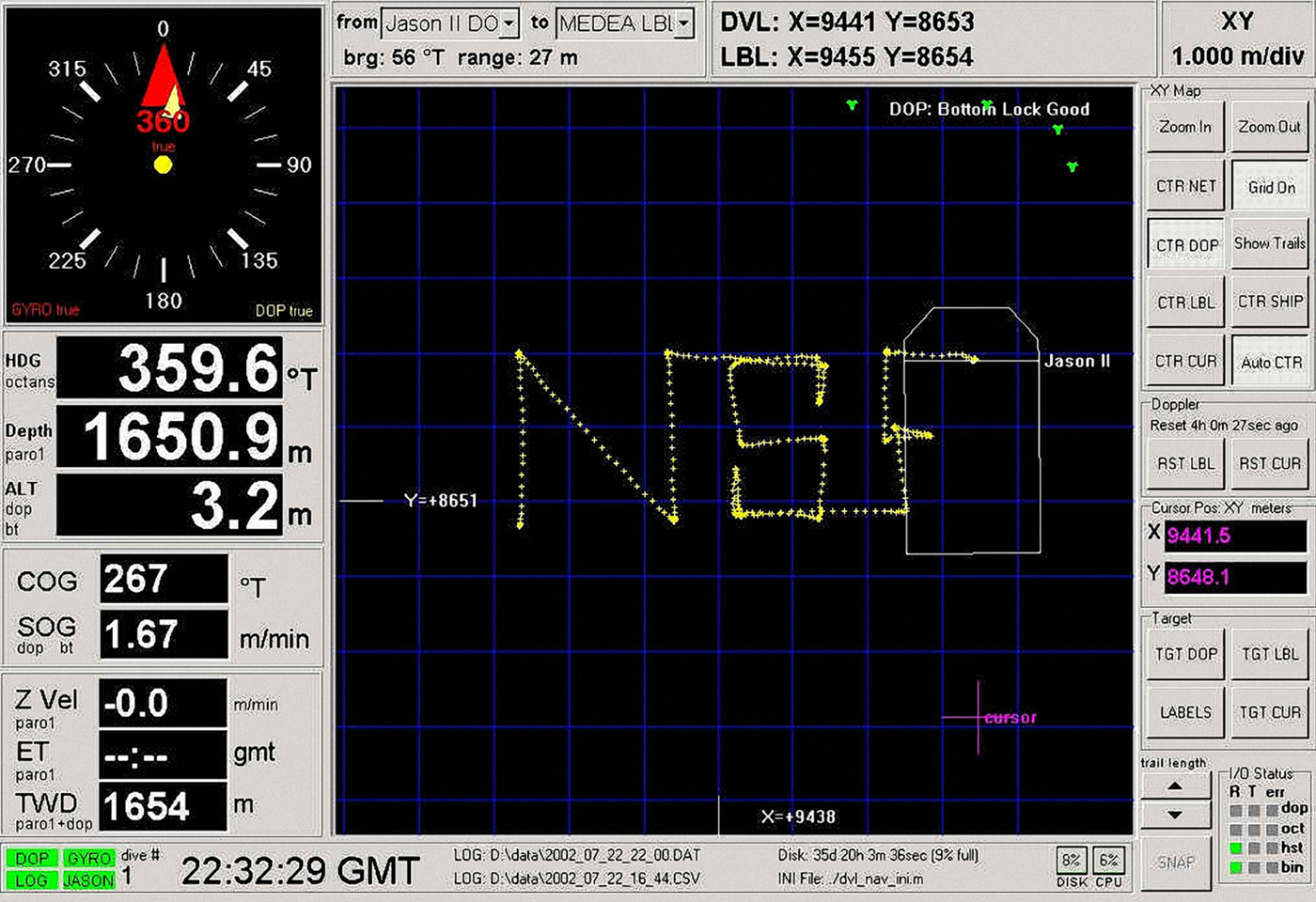
The DVLNAV is a high-reliability, high-precision underwater three-dimensional integrated navigation system developed by Johns Hopkins University and the WHOI. It has interactive functions. In the true-north coordinate system, the DVLNAV uses the bottom-tracking DVL and a north gyroscope to accurately calculate the XYZ displacement of Alvin. Alvin's initial position is given by the LBL acoustic navigation system or is manually input. The navigation software runs under the Windows operating system. The DVLNAV touchscreen supports human–computer interaction and displays all sensor information, sensor status indications, and real-time submersible position on the mobile map (Figure 6).
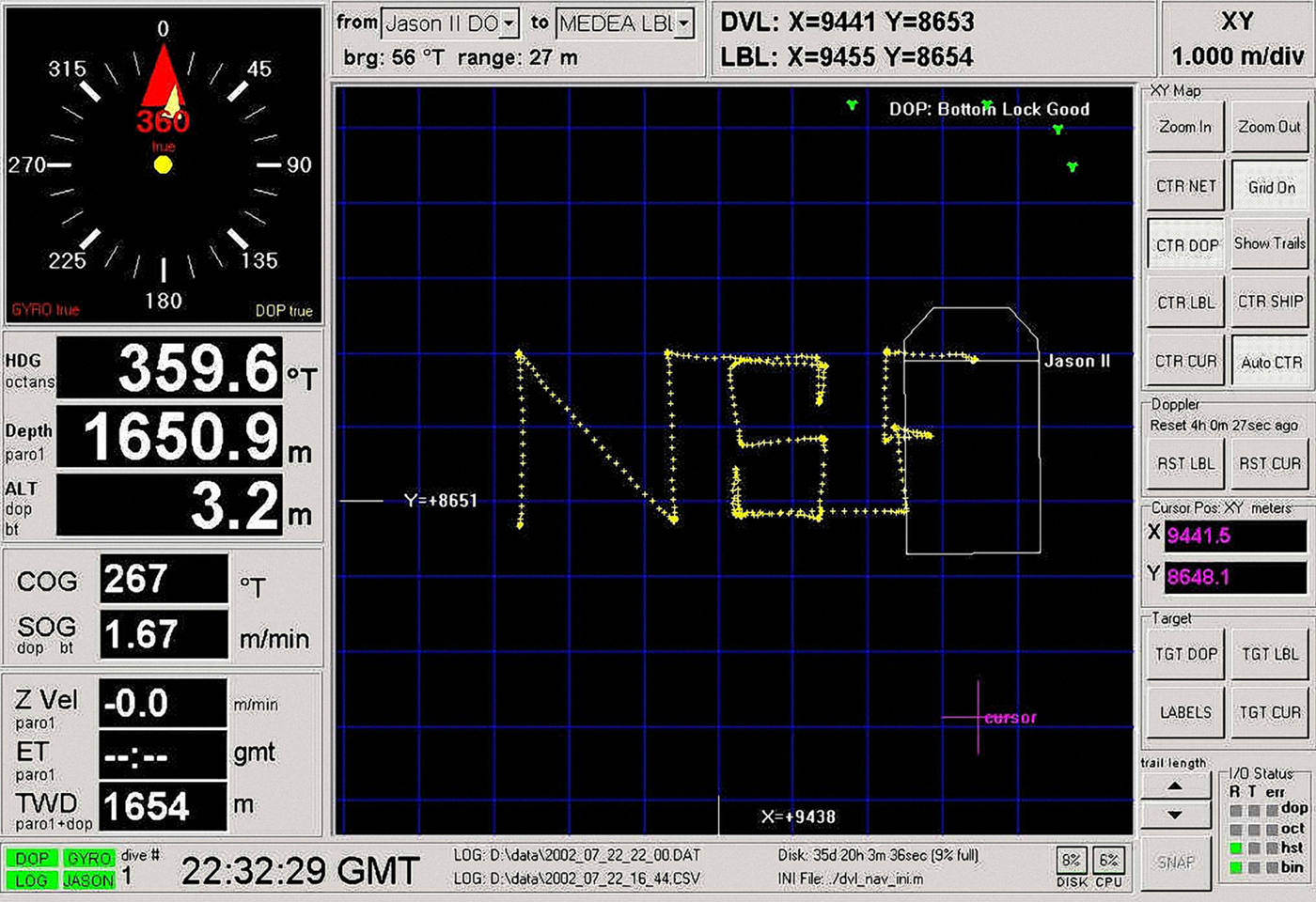
Figure 6. DVLNAV interface.
The DVLNAV time-stamps all sensor and navigation data and records them for data post-processing. Table 2 shows the properties of the DVLNAV log file. A simple Comma Separated Variables (CSV) file includes all sensor data and navigation data (time interval: 1 s), and a JPEG file contains a recorded screenshot of the DVLNAV display. A.dsl (data format) data file contains records of all raw and processed data (time interval: 0.001 s), and an Initialisation/Configuration (INI) file contains records of the DVLNAV initialisation parameter configuration. The latter two data files ensure that the navigation data can be fine-tuned using MATLAB. The DVLNAV also has the function of broadcasting various types of information to other computers.
Table 2. DVLNAV data files

3.2. Nautile
Technological advances have enabled Nautile to use dead reckoning on the seabed at the same time as the mothership is using acoustic positioning on the surface. Figure 7 shows a block diagram of the new-generation integrated navigation and positioning system for Nautile. The mothership is equipped with an iXblue new-generation USBL positioning system, which consists of a transducer array and an electronic cabinet (USBL-Box) for remote acoustic positioning of the submersible. The USBL-BOX also receives information from an iXblue High-Performance Inertial Navigation System (PHINS), including information related to the position, attitude, speed, etc, which further improves the navigation and positioning accuracy. iXblue PHINS and an iXblue acoustic synthetic baseline positioning system (Ramses) are installed on the manned submersible. PHINS can receive positioning data from Ramses, velocity data from the DVL and depth data from the depth sensor. Hence, PHINS constitutes a complete inertial base integrated navigation system.

Figure 7. Block diagram of new-generation integrated navigation and positioning system for Nautile (Copyright IFREMER).
3.3. Mir-1/Mir-2
Mir-1 and Mir-2 are equipped with modern underwater navigation systems, including the USBL, LBL and inertial navigation systems. Typically, the LBL system uses acoustic beacons to determine the precise position of the submersible, and the beacon measurements and calibrations are performed by the surface support mothership using satellite navigation system data. In the actual application process, in addition to the acoustic positioning system based on the seabed beacon, the manned submersible relies on the fibre optic gyroscope-based inertial navigation system and the DVL for combined navigation. Mir-1 and Mir-2 are the only manned submersibles in the world to achieve submarine ice dives (Sagalevitch, Reference Sagalevitch2013). Submersible diving under the Arctic ice brings many challenges. For the submersible to be able to return to the deck of the surface support mothership, it must come back to the ice hole created at the time of the dive. Under the influence of currents, the submersible may undergo a large offset during the dive and upswing phases. The surface ice can drift thus moving the mothership and ice hole. Such a drift has the potential to make the distance between the submersible and ice hole sufficiently large (up to several kilometres) such that the submersible could not reach the ice hole. In addition, because both gyroscopes and magnetic compasses can be unreliable in high latitudes, it is difficult to determine the direction of the ice hole relative to the submersible under water. To overcome the unreliability of the gyroscope and magnetic compass in the Arctic, the Russians have developed an acoustic direction system. This system is placed in the water from the deck of the mothership and can be precisely oriented within a range of 5 km.
In addition, the layout of the LBL acoustic beacons has to be changed. First, holes are drilled in the 2-2.5 m-thick ice layer, and then an acoustic beacon is be hung 100 m below the ice layer. In the actual application process, navigation personnel carry out ice hole detection using three ice beacons suspended by helicopters. When the submersible reaches the bottom of the sea, a fourth acoustic beacon is deployed by the mothership. Figure 8 shows a schematic diagram of the navigation system used when Mir is diving in the Arctic.

Figure 8. Schematic diagram of navigation system used when Mir is diving in Arctic.
3.4. Shinkai 6500
During dive operations, Shinkai 6500 acquires its own position in two ways using LBL and USBL systems. The LBL system requires more than three acoustic beacons to be placed on the seabed of the survey area. Shinkai 6500 can obtain its own location in real time. The USBL system does not require acoustic beacons to be placed on the sea floor, but its positioning performance is not as good as the LBL system (Takagawa et al., Reference Takagawa, Takahashi, Sane, Kyo, Mori and Nakanishi1989).
3.5. Jiaolong
As Jiaolong does not have an inertial navigation system, its underwater navigation relies mainly on USBL and LBL systems. However, in practical applications, the LBL system is limited by many factors. On one hand, it is difficult to meet the requirements of rapid investigation because a long time is required for beacon array deployment and recycling (for example, during the Pacific Tuberculosis Survey). On the other hand, acoustic signals are easily blocked and are not suitable for use in complex terrain areas such as the Indian Ocean hydrothermal zone and Pacific Ocean mountain zone.
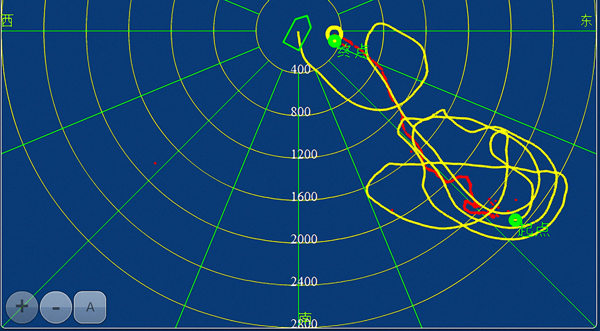
Unlike the LBL system, the USBL transducer array is installed at the bottom of the mothership and hence is not restricted by the above factors and is convenient to use. Therefore, the USBL system has become the main positioning tool for Jiaolong and it meets the navigation and positioning requirements for the submersible's dives. Figure 9 shows the trajectories of Jiaolong and its mothership during a dive. The red line is the Jiaolong trajectory measured by the USBL system, whereas the yellow line is the trajectory of the mothership measured by GPS.
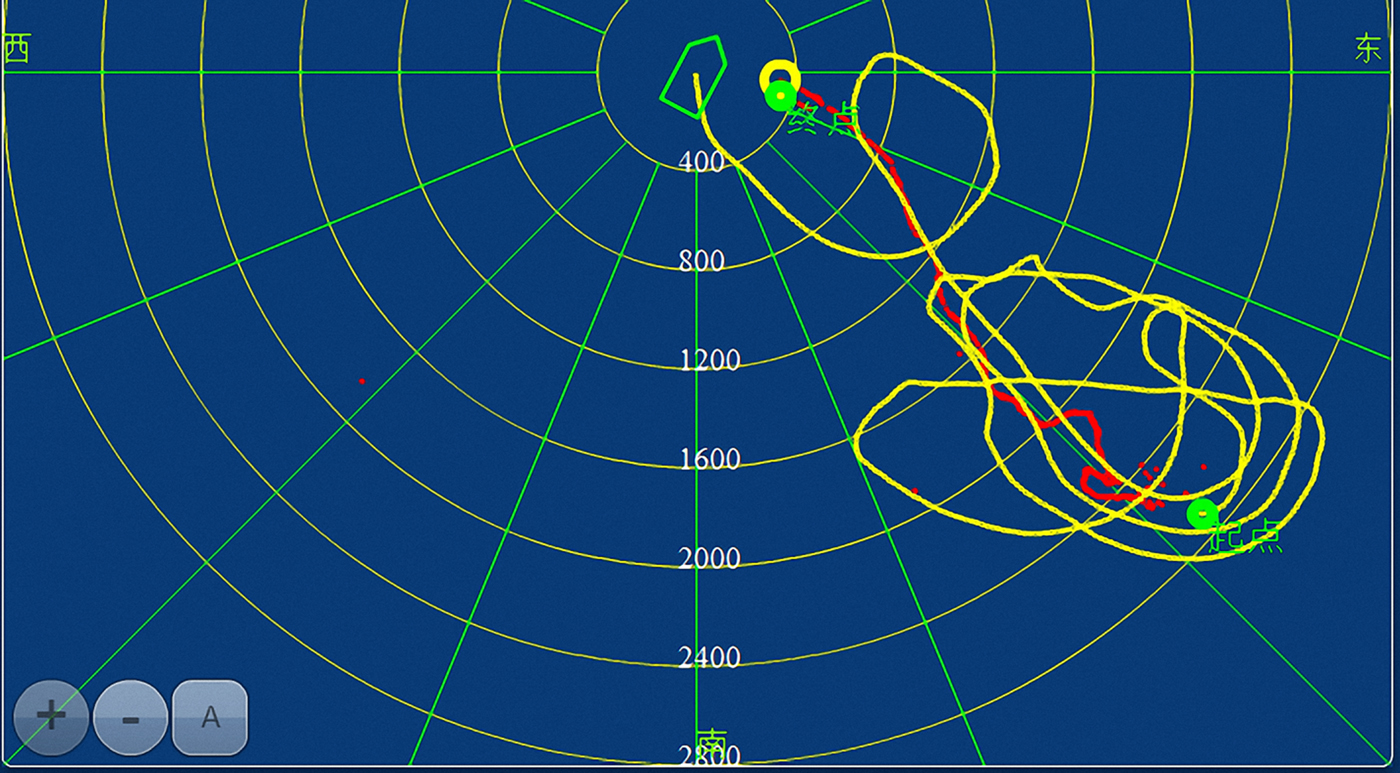
Figure 9. Trajectories of Jiaolong and its mothership during dive.
During an actual dive operation, Jiaolong uses the synchronous clock trigger mode. Synchronous clocks are installed on the mothership and submersible. The two synchronised clocks are first clocked before the submersible is launched. After the submersible is launched, the two synchronous clocks simultaneously trigger the surface signal processing unit and submersible transponder at the same time interval. The transponder transmits an acknowledge signal, and the surface signal processing unit measures the delay of the sync pulse and acknowledge signal. In this manner, the USBL system on the mothership can obtain the submersible positioning result. Then, the positioning result is sent to the submersible through an underwater acoustic digital communication device at a longer time interval such as 64 s (Zhang et al., Reference Zhang, Chen and Yan2018).
4. DEVELOPMENT TRENDS AND PROSPECTS
Through a comparative analysis of the navigation and positioning technologies used in operational deep-sea manned submersibles and by considering other systems, the following are possible future development trends for deep-sea submersible navigation and positioning technologies.
4.1. Combination of USBL and LBL systems
A disadvantage of the USBL system is that the positioning accuracy is related to the distance/depth. In the field of deep-sea operational support, some operations require more precise positioning, which requires the LBL system. The advantages of the LBL system are that the positioning accuracy is high and independent of the depth, whereas its disadvantages are that a beacon array needs to be placed, the equipment cost is high, and the detection process is time consuming. If the LBL and USBL systems are combined, the new positioning system should be able to provide good positioning accuracy independent of the working water depth and should also have the characteristics of USBL manoeuvring flexibility, thus achieving continuous high-precision navigation and positioning (Han et al., Reference Han, Li, Zheng and Sun2015; Wang et al., Reference Wang, Li and Zhang2018; Zhang et al., Reference Zhang, Liu and Liu2018).
4.2. Integration of USBL system and attitude sensor
The detached installation of USBL measuring devices results in an inevitable installation deviation between the shipboard acoustic transducer array and peripheral auxiliary sensors. Although the deviation can be effectively corrected by performing a sea calibration test, new deviations are introduced over time, resulting in a decrease in positioning performance. Each correction requires the selection of a suitable sea area, and it takes considerable time, manpower and material resources. If an attitude sensor is integrated with an acoustic transducer array and the calibration is performed in the laboratory, a portable, plug-and-play, calibration-free USBL system could be developed in the future (Napolitano et al., Reference Napolitano, Cretollier and Pelletier2005; Li et al., Reference Li, Dosso and Sun2016).
4.3. Combination of USBL/LBL systems and acoustic communication
USBL/LBL systems can realise underwater target positioning and tracking; digital underwater acoustic communication is the primary technical means for underwater wireless information acquisition, transmission and control. Most types of marine survey equipment require digital underwater acoustic communication for data transmission or command interaction. If USBL/LBL systems can be combined with high-speed digital underwater acoustic communication, communication functions can be added to USBL/LBL systems or positioning functions can be added to digital communication systems. An underwater integrated communication positioning system without positioning and communication mode conversion could be developed. The positioning data could be synchronously obtained during acoustic communication transmission (Pennec et al., Reference Pennec, Touin, Azou and Collin2010).
4.4. Higher positioning data update rate
When using the acoustic interrogation mode, the USBL system usually waits for the next inquiry after receiving the last response signal. When using the synchronous trigger mode, only one-way sound propagation is required and hence the data update rate can be doubled. However, in deep-sea integrated applications, the positioning data update rate is relatively low regardless of the working mode. If the positioning pulse is encoded, the USBL system can correctly decode the received response signal and determine its corresponding positioning sequence and then it can continuously transmit multiple interrogation pulses to the transponder before the previous response signal is received. Thus, the update rate of the positioning data of the USBL system can be greatly improved (West and Ceurstemont, Reference West and Ceurstemont2018).
4.5. Fast LBL-array calibration
The main disadvantage of the LBL system is that it requires considerable time and effort to deploy beacon arrays and perform array calibration. This is because traditional LBL processing usually involves successive calibrations. When the absolute position measurement of the beacon is performed using the USBL system of the surface ship, it is often necessary for the ship to navigate a circular trajectory around the beacon, and the measurement accuracy is improved by multiple multi-angle measurements. If a data transmission function can be added to the beacon, the mutual measurement of the baseline between the beacons can be performed by batch processing and a relative array calibration can be completed to realise fast LBL-array calibration (Zhang, Reference Zhang2014).
4.6. Single-beacon assisted navigation
The fast calibration of the LBL array can greatly improve the calibration efficiency, but the deployment and recycling of multiple beacons will still require considerable time and effort. If only a single beacon fixed on the seabed is used to provide ranging information and if this beacon is combined with an inertial navigation system, high-precision navigation and positioning can be realised through the reasonable planning of the navigation path (Paull et al., Reference Paull, Saeedi, Seto and Li2014).
5. CONCLUSIONS
Navigation and positioning are key technologies for deep-sea manned submersibles. The aim of this study was to provide a review of navigation and positioning of operational deep-sea manned submersibles. To this end, six deep-sea manned submersibles (>4,500 m) are described and navigation and positioning technologies used in those submersibles discussed.
Alvin uses GPS, fibre optic gyroscope, pressure sensor, altimeter, DVL, USBL and LBL in its navigation and positioning; Nautile's new-generation integrated navigation and positioning system includes USBL, PHINS, Ramses, DVL, and a pressure sensor; Mir-1/Mir-2's underwater navigation system was designed for diving under the Arctic ice, including USBL, LBL and inertial navigation systems; Shinkai 6500 acquires its own position in two ways using LBL and USBL and Jiaolong's underwater navigation relies mainly on USBL and LBL.
Based on the real application of navigation and positioning technologies used in deep-sea manned submersibles, future development trends are thought to be as follows: (1) combination of USBL and LBL systems; (2) integration of the USBL system and an attitude sensor; (3) combination of USBL/LBL systems and acoustic communication; (4) use of a higher positioning data update rate; (5) fast LBL-array calibration and (6) single-beacon assisted navigation.
FINANCIAL SUPPORT
This work was supported in part by the National Key R&D Program of China under Grant 2017YFC0305700, Qingdao National Laboratory for Marine Science and Technology under Grant QNLM2016ORP0406, Taishan Scholar Project Funding under Grant TSPD20161007, National Natural Science Foundation of China under Grant 41641049, Shandong Provincial Natural Science Foundation under Grant ZR2015EM005, Shandong Provincial Key R&D Program under Grant 2016GSF115006 and Qingdao Independent Innovation Project under Grant 15-9-1-90-JCH.