1. INTRODUCTION
A ship domain is an area around a ship that the vast majority of other ships should avoid entering; it is an evaluation of a ship's safety in the field of traffic engineering. Early ship domain models with fixed boundaries divided the space around a ship into two areas: danger and safety (Fujii and Tanaka, Reference Fujii and Tanaka1971; Toyota and Fujii, Reference Toyota and Fujii1971; Goodwin, Reference Goodwin1975; Davis et al., Reference Davis, Dove and Stockel1980; Reference Davis, Dove and Stoekel1982; Tak and Spaans, Reference Tak and Spaans1977; Coldwell, Reference Coldwell1983; Kijima and Furukawa, Reference Kijima and Furukawa2003). Statistical methods (Hansen et al., Reference Hansen, Jensen, Lehn-Schiøler, Melchild, Rasmussen and Ennemark2013; Hsu, Reference Hsu2014; Wielgosz and Pietrzykowski, Reference Wielgosz and Pietrzykowski2012) or neural network methods based on statistical data were used to derive it (Zhu et al., Reference Zhu, Xu and Lin2001). Apart from these methods, the analysis method frequently used to obtain a ship domain has a fixed boundary, and the domain is obtained by analysing the relationship between ship safety and the distance that ships keep from each other, based on the reciprocal motion of the ships' movements (Wang, Reference Wang2016; Svetak, Reference Svetak2009; Wang, Reference Wang2014). In contrast to ship domain models based on fixed boundaries, Zhao et al. (Reference Zhao, Wu and Wang1993) first proposed the concept of a fuzzy boundary ship domain, in which the fuzzy boundary was determined by a given fuzzy set for each element of the difference between the estimated Distance of Closest Point of Approach (DCPA) and the safe DCPA. Pietrzykowski (Reference Pietrzykowski2008) and Pietrzykowski and Uriasz (Reference Pietrzykowski and Uriasz2009) then further developed the concept of a fuzzy ship domain into one that divides the area around a ship into not only danger and safety areas but also areas with varying safety levels. In a recent series of fuzzy ship domain concept studies (Wang et al., Reference Wang, Meng, Xu and Wang2009; Wang, Reference Wang2010; Reference Wang2013; Liu et al., Reference Liu, Wang, Shao and Wu2014), the fuzzy boundaries were subjectively defined and determined by a neural network method based on statistical data (Pietrzykowski and Uriasz, Reference Pietrzykowski and Uriasz2009), or by an analytical method (Pietrzykowski and Uriasz, Reference Pietrzykowski and Uriasz2009; Wang et al., Reference Wang, Meng, Xu and Wang2009; Wang, Reference Wang2010; Reference Wang2013; Liu et al., Reference Liu, Wang, Shao and Wu2014).
Early domain models considered few factors specific to the central ship, while factors relating to encountering ships were not considered. The domains could be seen as being generic ship domains with characteristics common to a vast majority of ships, rather than being specific to an individual ship. With the further development of ship domain models, the number of factors considered for the central ship increased, as did the distinction of the central ship and the distinction of the environment more broadly: the domain model gradually approached a level highly specific to the individual characteristics of the central ship but modelling of the domain of the encountering ship remained generic.
The ship domain is the area around ships that they mutually avoid. It is determined not only by the central ship but also by the other ships meeting it. The ship domain established from the perspective of the central ship alone cannot guarantee that all other ships avoiding this area would be safe; conversely, it is also not necessarily the case that ships entering this area would be in danger. Obviously, it would be unreasonable for a ship to maintain the same domain when encountering different ships. With the fuzzy ship domain concept, it would be similarly unreasonable for the central ship to have the same ship domain with fixed risk levels when meeting different ships. Therefore, the shortcomings of modelling the ship domain from the perspective of the central ship alone are clear.
Determining a ship domain is a challenging task, as the size and shape of the domain are affected by numerous factors. At the same time, which factors should be chosen and how to choose factors comprehensively and rationally are important.
To address the aforementioned problems, the work described in this paper is organised as follows: In Section 2, the concept of ship domain established considering factors related to own ship and other ships is analysed, and the corresponding definition of a dynamic fuzzy ship domain based on the former fuzzy ship domain from the perspective of the central ship is given. In Section 3, the data source and the procurement process for the samples are introduced. In Section 4.1, the difficulty of ship domain study is simplified by analysis and screening of the factors that affect it. In Section 4.2, wavelet decomposition and neural network methods are used to determine the relationship between the ship domain and the selected factors, and the effectiveness of the method is proven. In Section 4.3, the dynamic fuzzy ship domain is obtained. In Section 5, the rationality and the advantage of the dynamic fuzzy ship domain established considering the factors of own ship and other ships is analysed.
2. DYNAMIC FUZZY SHIP DOMAIN ESTABLISHED CONSIDERING THE FACTORS OF OWN SHIP AND OTHER SHIPS
When Fujii and Tanaka (Reference Fujii and Tanaka1971) first proposed the concept of ship domain, they defined it referring to the situation in which “most of the navigators of the following ships avoid entering the surrounding waters of the fore-going ship”. The other frequently quoted definition of ship domain was by Goodwin (Reference Goodwin1975): “the surrounding effective waters which the navigator of a ship wants to keep clear of other ships or fixed objects”. Fujii and Tanaka and Goodwin put forward the concept of the ship domain from the perspective of the give-way ship and the central ship. Based on their definitions, the existing domain models were determined from the perspective of a single ship with different factors being taken into consideration. These factors can be classified into four categories: ship factors, human factors, ship movement status factors and environmental factors.
It is obviously unreasonable for the central ship to keep the same ship domain with all other ships when these other ships would be of different sizes or moving at different speeds. For example, when own ship o encounters ships o1, o2, o3 or ships o4, o5, o6, with speeds of o1, o2, o3 being less than those of o4, o5, o6 (Figure 1), obviously the ship domain between o and o1, o2, o3 will be smaller than the ship domain between o and o4, o5, o6. Conclusions about other factors can be similarly obtained.
Figure 1. The ship domain of the central ship encountering ships of different speeds.
Similarly, even with the same ship domain, the risk is different when the central ship encounters other ships of different sizes or speeds. Therefore, the ship domain should consider factors relating to both the central ship and other ships. An updated ship domain definition could be “the surrounding effective waters of a ship that the navigators of encountering ships would want to mutually avoid and within which fixed objects should not enter”.
When constructing a dynamic fuzzy ship domain considering the factors of own ship and other ships, the dynamic ship domain considering the factors of own ship and other ships is obtained first by adding the influencing factors of the other ships upon on the existing ship domain established considering the factors of only one ship. Then, the domain is made fuzzy to obtain the dynamic fuzzy ship domain considering the factors of own ship and other ships.
2.1. Dynamic ship domain considering the factors of own ship and other ships
A dynamic ship domain considering the factors of own ship and other ships as per the work of Pietrzykowski and Uriasz (Reference Pietrzykowski and Uriasz2004) can be given as follows. Adopting a certain level of relative bearing discretisation (for example, ΔRB = I°), the ship domain boundary B DS is defined by a curve joining n points p Di(i = 1, 2, …, n) situated on headings RB i at distances d DRBi from the ship centre (for example, centre of the water plane) (Pietrzykowski and Uriasz, Reference Pietrzykowski and Uriasz2004):
 $$B_{DS} = \{p_{D1}, p_{D2}, \cdots P_{Dn}\}$$
$$B_{DS} = \{p_{D1}, p_{D2}, \cdots P_{Dn}\}$$The size of ship domain D S for each relative bearing is described as follows:
 $$D_{S}(RB_{i}) \leq d_{{DRBi}} \quad (i = 1, 2, \cdots, n)$$
$$D_{S}(RB_{i}) \leq d_{{DRBi}} \quad (i = 1, 2, \cdots, n)$$If the factors affecting the ship domain include human factors (I N), environmental factors (I E), management factors (I M), own ship factors (I O) and other ships' factors (I A), d DRBi and the influence factors of I N, I O, I E, I M satisfy the relationship:
 $$d_{{DRBi}} = f_{1i} (I_{N}, I_{E}, I_{M}, I_{o}, I_{A})\ (i = 1, 2, \cdots, n)$$
$$d_{{DRBi}} = f_{1i} (I_{N}, I_{E}, I_{M}, I_{o}, I_{A})\ (i = 1, 2, \cdots, n)$$The dynamic ship domain considering factors of own ship and other ships can be described as:
 $$D_{S} = \{d_{{DRBi}} \vert d_{{DRBi}} = f_{1i} (I_{N}, I_{E}, I_{M}, I_{o}, I_{A})\}\ (i = 1, 2, \cdots, n)$$
$$D_{S} = \{d_{{DRBi}} \vert d_{{DRBi}} = f_{1i} (I_{N}, I_{E}, I_{M}, I_{o}, I_{A})\}\ (i = 1, 2, \cdots, n)$$2.2. Dynamic fuzzy ship domain considering the factors of own ship and other ships
The dynamic fuzzy ship domain considers the factors of own ship and other ships by defining the dynamic ship domain considering the factors of own ship and other ships under different safety levels; the dynamic fuzzy ship domain is defined as:
 $$D_{SF}(r) = \{d_{{DFRB}i}\vert f_{2}(d_{{DFRBi}}, I_{N}, I_{E}, I_{M}, I_{o}, I_{A}) = r\}\ (i = 1, 2, \cdots, n)$$
$$D_{SF}(r) = \{d_{{DFRB}i}\vert f_{2}(d_{{DFRBi}}, I_{N}, I_{E}, I_{M}, I_{o}, I_{A}) = r\}\ (i = 1, 2, \cdots, n)$$ where: f 2 are the functions of  $d_{{DFRB}_{i}}$ attributes to the set of the safety levels on relative bearing RB i with factors of I N, I E, I M, I o, I A;
$d_{{DFRB}_{i}}$ attributes to the set of the safety levels on relative bearing RB i with factors of I N, I E, I M, I o, I A;  $d_{{DFRB}_{i}} \in \langle 0\comma \; +\infty\rpar \lsqb m\rsqb $, r is the safety level and r ∈ [0, 1).
$d_{{DFRB}_{i}} \in \langle 0\comma \; +\infty\rpar \lsqb m\rsqb $, r is the safety level and r ∈ [0, 1).
The dynamic fuzzy ship domain considers the factors associated with own ship and other ships, with the boundary being dynamic. The domain distinguishes the boundary more than once, which can be used for assessing the safety of navigation.
3. DATASET
The statistical data used for the study of the ship domain and the associated factors are based on Automatic Identification System (AIS) data in the area of the Bohai Sea and the northern Yellow Sea (Figure 2). The registered ships were all the ships in the water from 26 September 2014 to 13 October 2014, with the total number of ships being 3,000 to 7,000 every day, the total number of ship types being 15, the lengths of the ships ranging from 10 m to 366 m, and the speeds of the ships ranging from 0 knot to 26 knots. The meteorological data is from the central meteorological observatory weather forecast and the hydrological data is from the national marine environmental forecasting centre. The data meets the requirements of the study.

Figure 2. The areas in which the studies were conducted.
According to the formulae for the dynamic ship domain Equation (4) and the dynamic fuzzy ship domain Equation (5), the domain is determined when the relationship of the ship domain and the factors influencing the ship domain along direction β are determined. The samples chosen for the study are those with the smallest distance d β between the central ship (stand-on ship) and the give-way ship (Pietrzykowski and Uriasz, Reference Pietrzykowski and Uriasz2009) situated along direction β. As per existing studies, the sizes of the ship domains along different directions around the central ship cannot be compared, as these are different. The samples include situations with the give-way ship on different sides of the central ship, so the samples should be normalised with their lengths in the same direction in order to make a comparison with the domain changed by the factors.
First, the smallest distance d β was obtained. AIS transmits a ship's location at intervals of 2 seconds to 3 minutes. Interval timings are related to ship speed and to whether a ship takes a turn or goes straight; intervals become shorter as ship speed increases or when a ship is turning. At some points, the accurate position of a ship may not be obtainable, as the recorded characteristic of the AIS data and the point may occasionally be absent, so the distance has to be approximated. Figure 3 illustrates the method of obtaining d β using the AIS data. The locations of the two ships o1 and o2 at time t i (i = 1, 2, …, 7) are presented, where o1 is the stand-on ship, o2 is the give-way ship and the nearest distance d β between the two ships is at point t 5. Due to the interval between the AIS data points, the smallest distance is such that the location of the central ship is precise at time t 5. The location of the avoiding ship is the time nearest to t 5, with a lag time of within 20 seconds, which can help ensure that the errors between the actual distance and the calculated distance are within an acceptable range. Simultaneously, the values of the corresponding factors (environmental factors, ship factors, driver factors and management factors) are recorded. The total number of samples is 2,023. The sample size satisfies the needs of the study, and the effects of the seasons can be covered by the factors. Second, d β was normalised to the length in the same direction of the central ship. The directions of the bow and stern of the central ship are 0° and 180°, respectively. As the ship domain in this paper is constructed from the perspective of collision avoidance, the safe distance that the central ship should keep from other ships on the right or left should be the same, as the ships' movements are the same regardless of which side they occur on. The ship domain should have longitudinal symmetry. Moreover, the studied water is open water, so the typical ship domain of Goodwin (Reference Goodwin1975) for open water is chosen to make the normalisation, and the domain samples are normalised through Equation (6), as defined in Figure 4.
 $$l = \left\{ {\matrix{ {9/14d_\beta } \hfill & {({0^\circ} \le \beta \le 112\cdot {5^\circ} )} \hfill \cr {d_\beta } \hfill & {(112\cdot {5^\circ} < \beta \le {180^\circ} )} \hfill \cr } } \right.$$
$$l = \left\{ {\matrix{ {9/14d_\beta } \hfill & {({0^\circ} \le \beta \le 112\cdot {5^\circ} )} \hfill \cr {d_\beta } \hfill & {(112\cdot {5^\circ} < \beta \le {180^\circ} )} \hfill \cr } } \right.$$where d β is the distance from the central ship to the avoiding ship situated on the relative bearing RBi; d β ∈ [0, + ∞) [m] and l is the distance from the stern of the ship domain to the central ship; l ∈ [0, + ∞) [m], β ∈ [112 · 5, 180][°].
Figure 3. The smallest distance between the stand-on ship o1 and the give-way ship o2 along the direction β of the stand-on ship at the time t 5.

Figure 4. Graphic representation of the ship domain normalisation method.
4. THE DETERMINATION OF SHIP DOMAIN
In this part, the research process, methods and results are introduced. First, factors affecting the ship domain are chosen. Then, the relationship between the ship domain and the selected factors is determined by the methods of wavelet decomposition and Back Propagation (BP) neural network, and the accuracy is analysed. Lastly, the fuzzy domain based on a human psychology formula is obtained.
4.1. Choice of factors affecting the ship domain
An important consideration in the study of ship domains is the choice of influencing factors, as many factors can affect a ship domain and make it difficult to determine. The necessity and the importance of factors should be analysed, and the factors important for studying the ship domain should be selected. In this paper, the difficulty in studying the ship domain is decreased by reducing the factor set and selecting the important factors reasonably. According to Pietrzykowski and Uriasz (Reference Pietrzykowski and Uriasz2009), the factors that should be considered while determining the ship domain are as follows: ship speed, encounter angle, length of the ship, traffic density in the area, wind, wave heights and direction, current, visibility and ship type.
The rough set and principal component regression theories are used to analyse the importance of factors and the relationship between them (Zhou and Zheng, Reference Zhou and Zheng2017). The results show that information redundancy exists between the factors of wind, visibility, wave and current; these factors can be ignored when in sight of one another, as their importance is much less than that of the other factors. If the factors associated with the central ship have an important influence on the ship domain, then the factors associated with the avoiding ship should also have an important influence on the ship domain. The factors chosen for determining the ship domain are given in Table 1; the measurement units of the factors are given in Zhou and Zheng (Reference Zhou and Zheng2017).
Table 1. Factors chosen for the study of ship domain.
4.2. Determination of the relationship between the ship domain and its factors
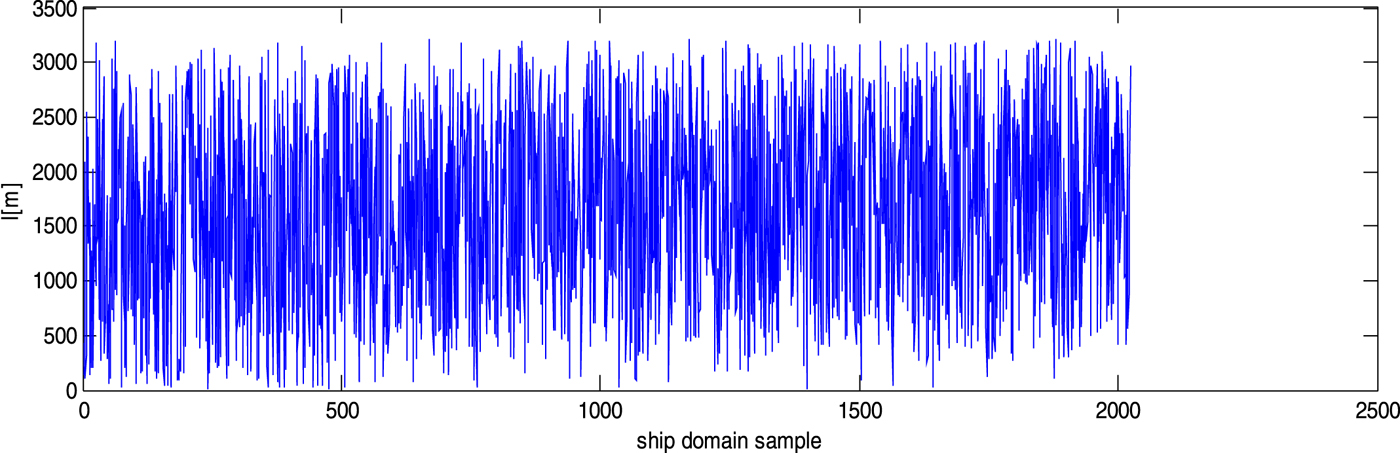
In this part, we make a determination of the size of the domain and its factors using wavelet decomposition and neural network methods. First, the domain samples should be processed because the ship domain samples determined by the navigators would have differences. Figure 5 shows the original domain samples arranged by speed from the smallest to the largest. It is apparent that the ship domain varies randomly with ship speed and without change rules. Usually, the domains obtained are statistically averaged (Pietrzykowski and Uriasz, Reference Pietrzykowski and Uriasz2009); in this paper, wavelet decomposition is applied to obtain the statistical domain, as wavelet decomposition at low frequencies represents the change features of the data. The process of using the MATLAB R2012a wavelet toolbox to obtain the low frequencies is as follows:
the MATLAB wavelet toolbox is used for making the wavelet decomposition. With the one-dimensional vector L = (l 1, l 2, · · · , l 2023) being input, the number of samples is 2,023;
the wavelet basis function chosen is Haar (Daubechies, Reference Daubechies1998), and the number of floors is seven;
the low-frequency component
 $L^{\prime} = \lpar l_{1}^{\prime}\comma \; l_{2}^{\prime}\comma \; \cdots {l_{2023}}^{\prime}\rpar $ is obtained.
$L^{\prime} = \lpar l_{1}^{\prime}\comma \; l_{2}^{\prime}\comma \; \cdots {l_{2023}}^{\prime}\rpar $ is obtained.

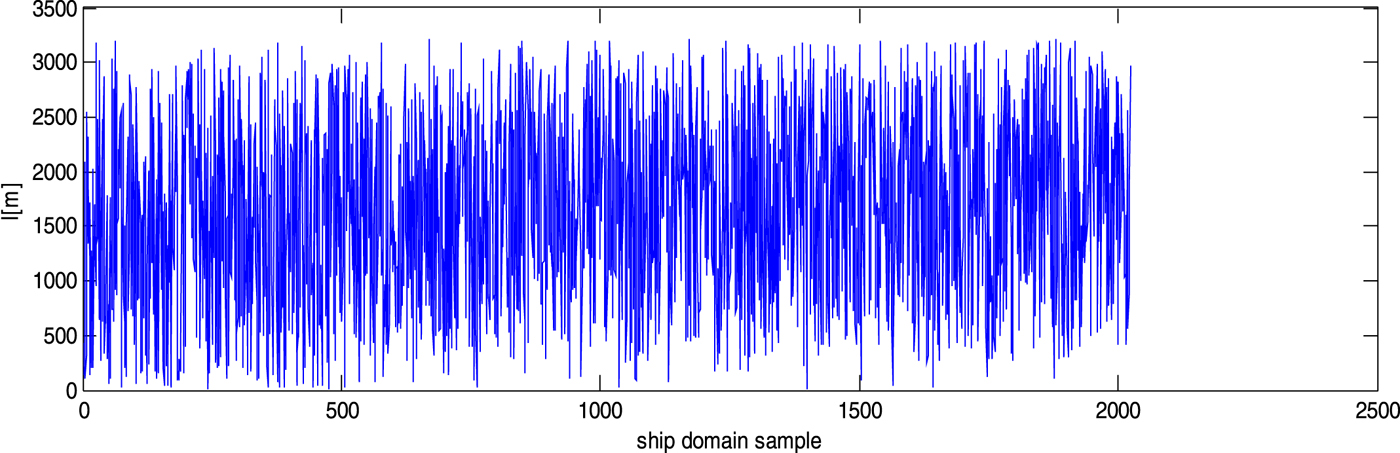
Figure 5. Original ship domain samples sorted in ascending order of ship speed.
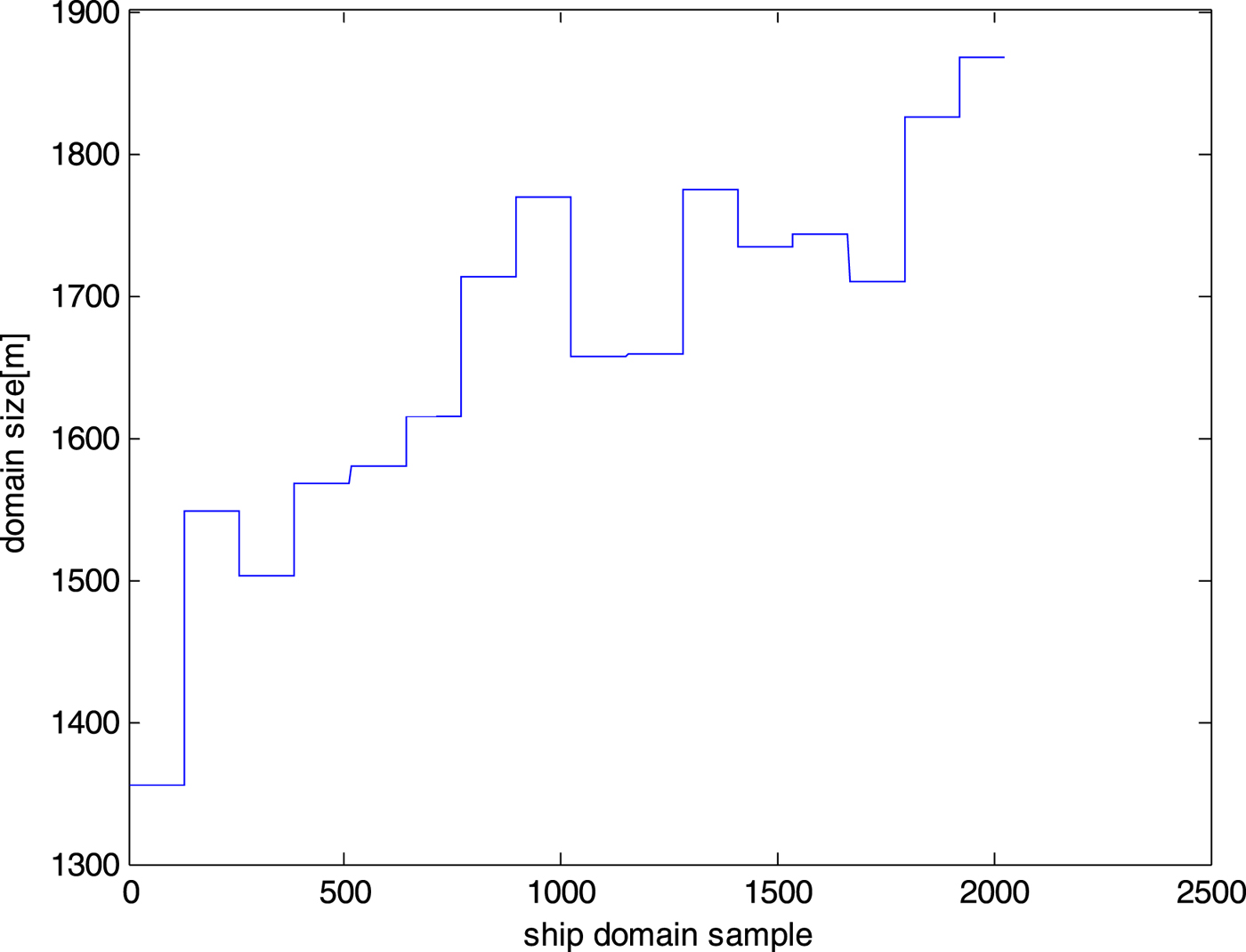
The results show that the ship domain increases as ship speed increases (Figure 6). The wavelet decomposition at low frequencies is chosen as the statistical ship domain.
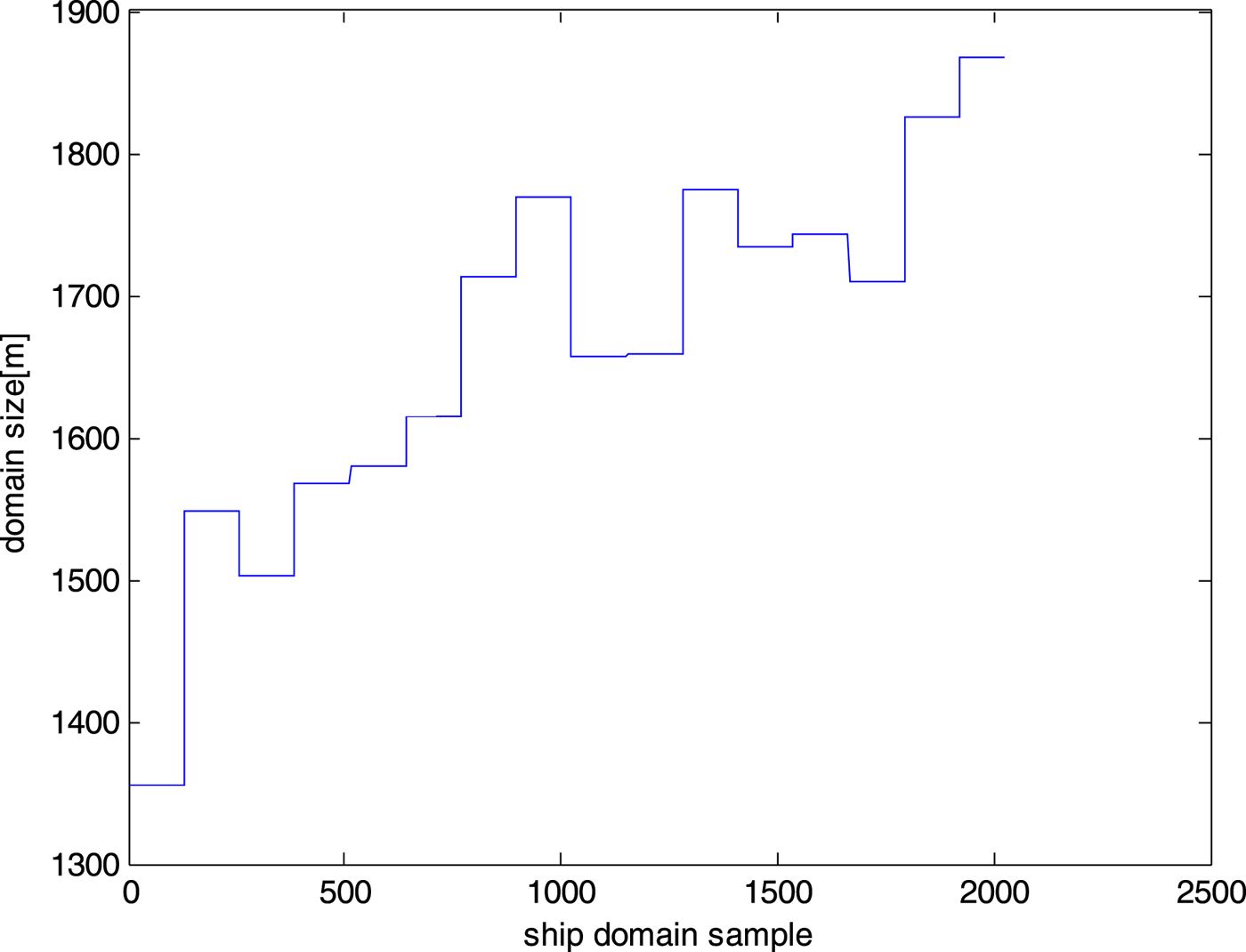
Figure 6. Low-frequency component of the ship domain obtained by wavelet decomposition.
The BP neural network method is then applied to determine the relationship between the ship domain and the factors. Two-thirds of the samples are chosen randomly as the training samples, and the remaining one-third are the test samples. The MATLAB R2012a BP neural network toolbox is used to obtain the model as per the following process:
min-max normalisation is used to normalise the data;
two-thirds of the samples are selected randomly as the training samples;
the BP neural network toolbox of MATLAB is used to obtain the network f 1.
The parameters are set in the process of training the network using the BP neural network toolbox of MATLAB as shown in Table 2; the number of neurons in the hidden layer is determined experimentally to achieve the least Mean Square Error (MSE) and the best fit (R). The obtained model has a fitting degree of 0·9188, indicating that the model performs well.
Table 2. Parameter setting in the process of training the network using the BP neural network toolbox of MATLAB.
Next, the accuracy of the input-output network is tested using the test samples. The values of the network response for the input vectors are l oa:
 $$l_{oa} = f_1 (S_0, EA, L_0, D, T_0, S_a, L_a,T_a)$$
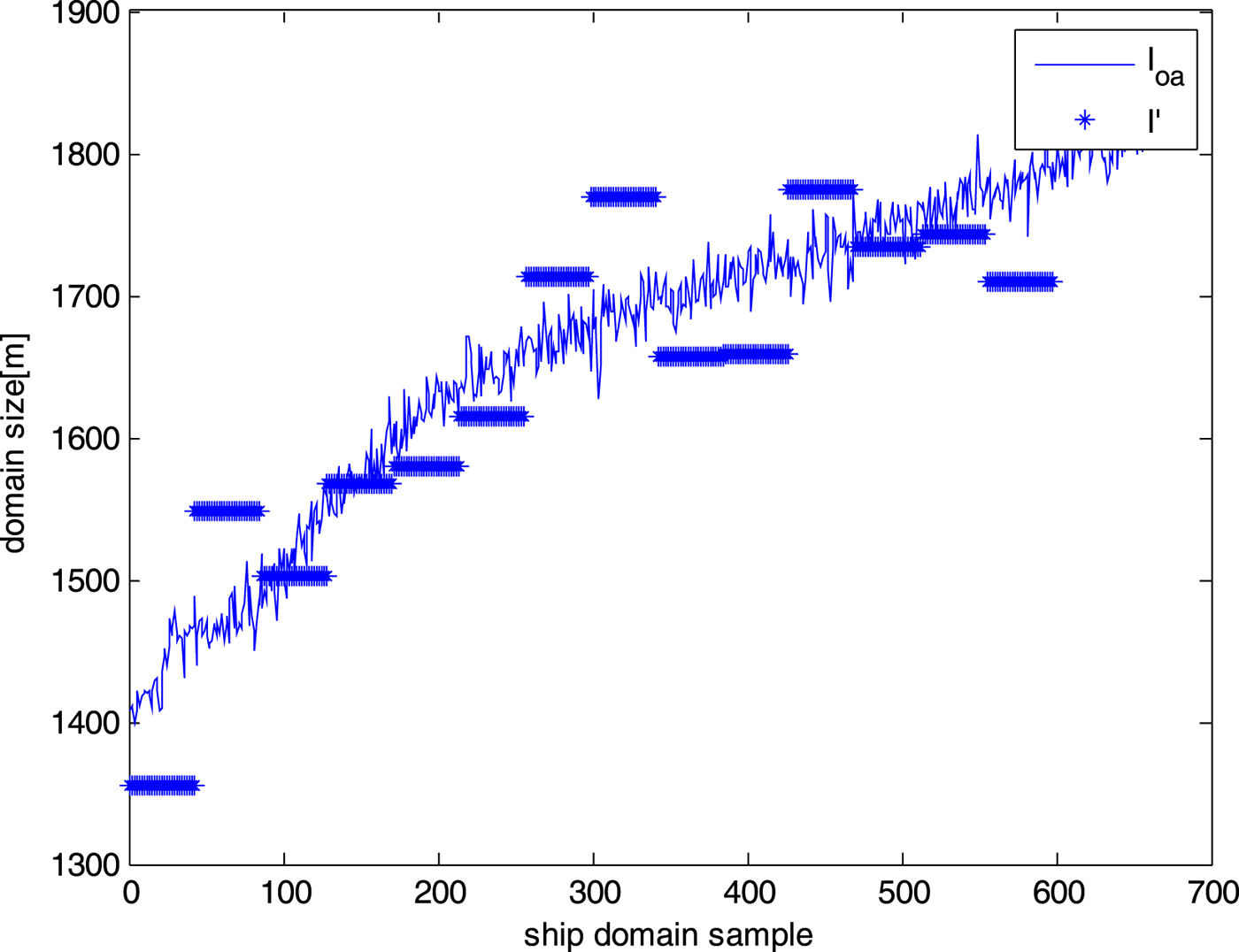
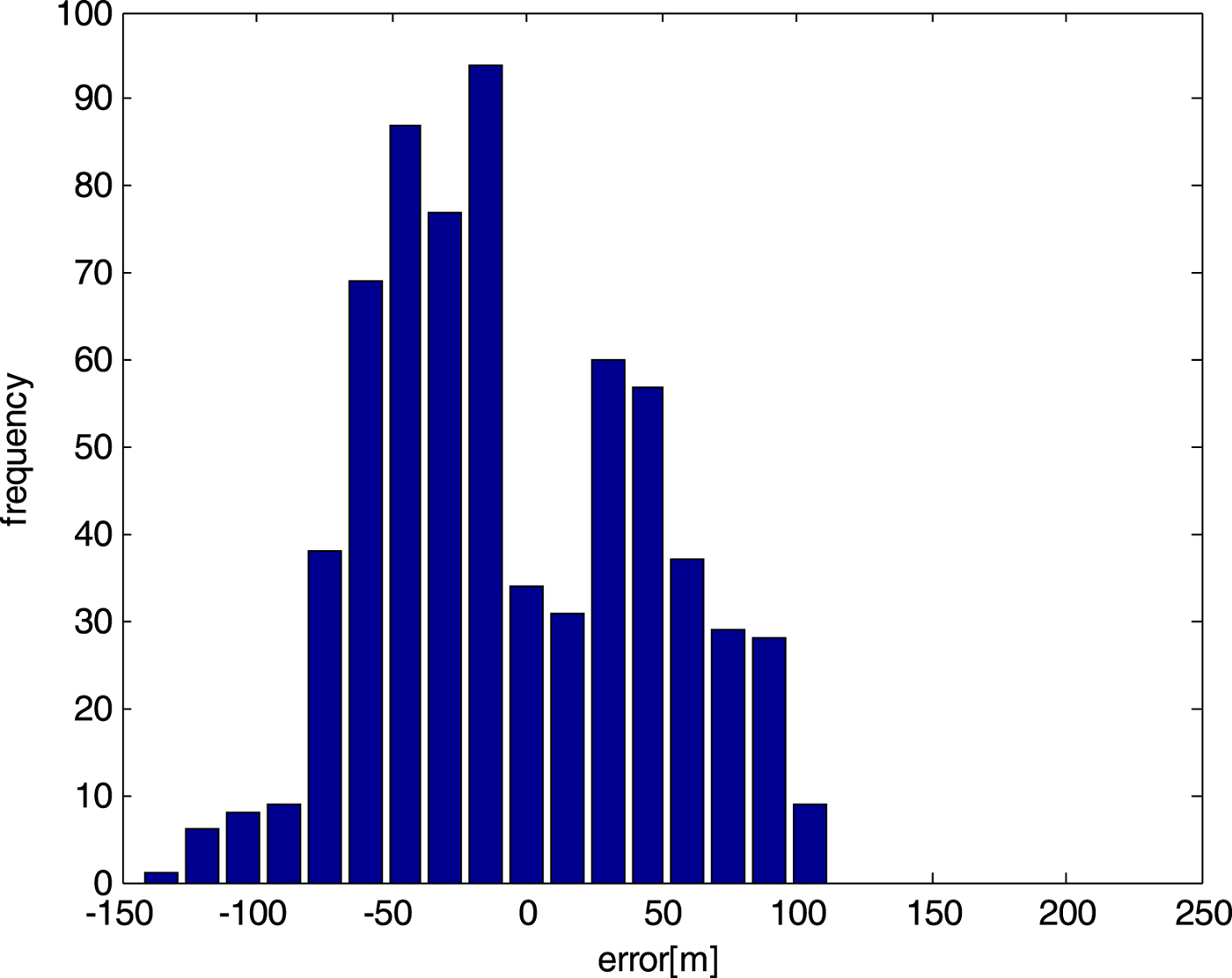
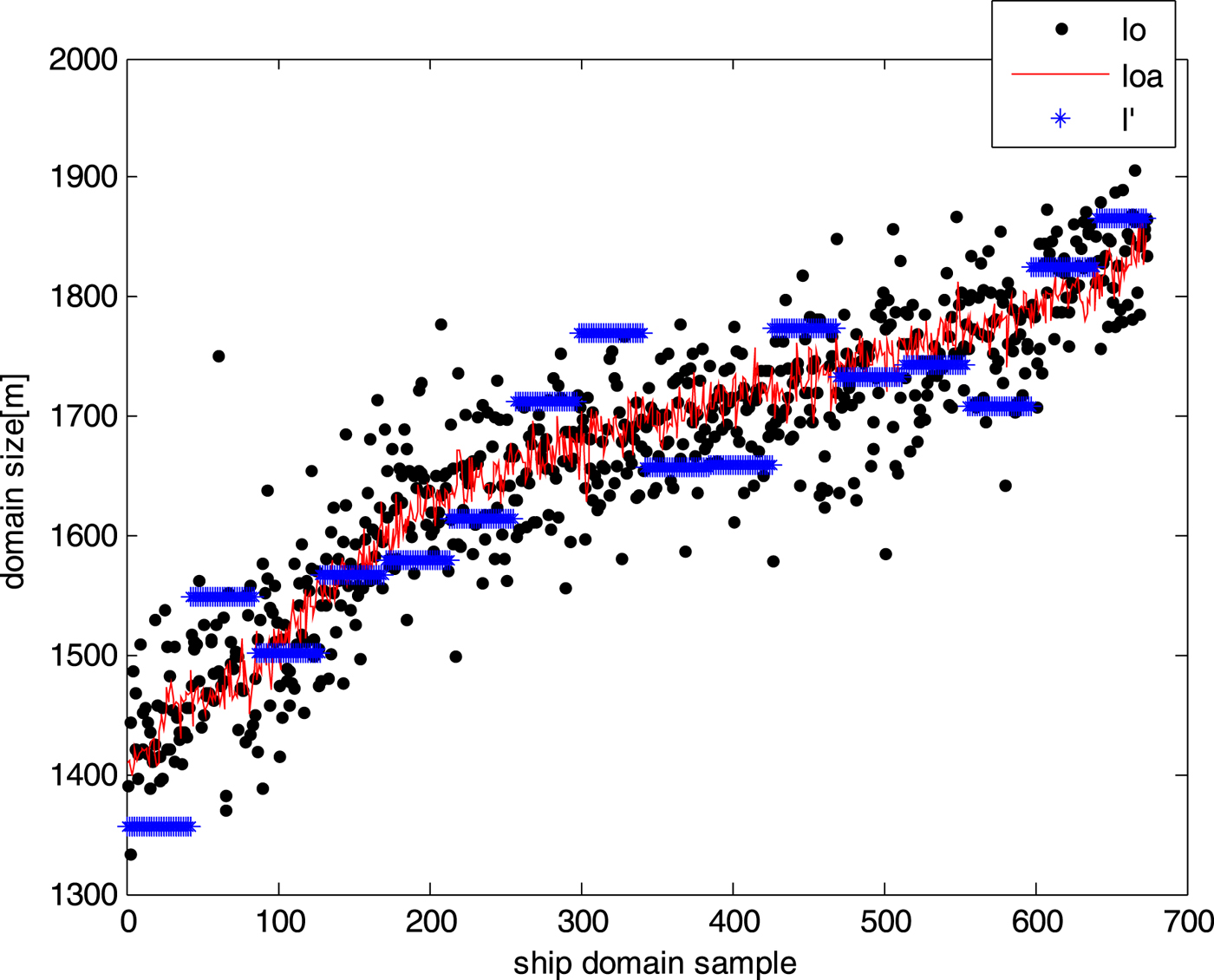
$$l_{oa} = f_1 (S_0, EA, L_0, D, T_0, S_a, L_a,T_a)$$The result of the comparison between the estimated ship domain l oa and the statistical ship domain (Figure 7) shows that the model has a higher precision and that the error is within an acceptable range of the magnitude of the ship domain (Figure 8). The network established the dynamic relationship between the ship domain and its factors from the perspective of the encountering ships.
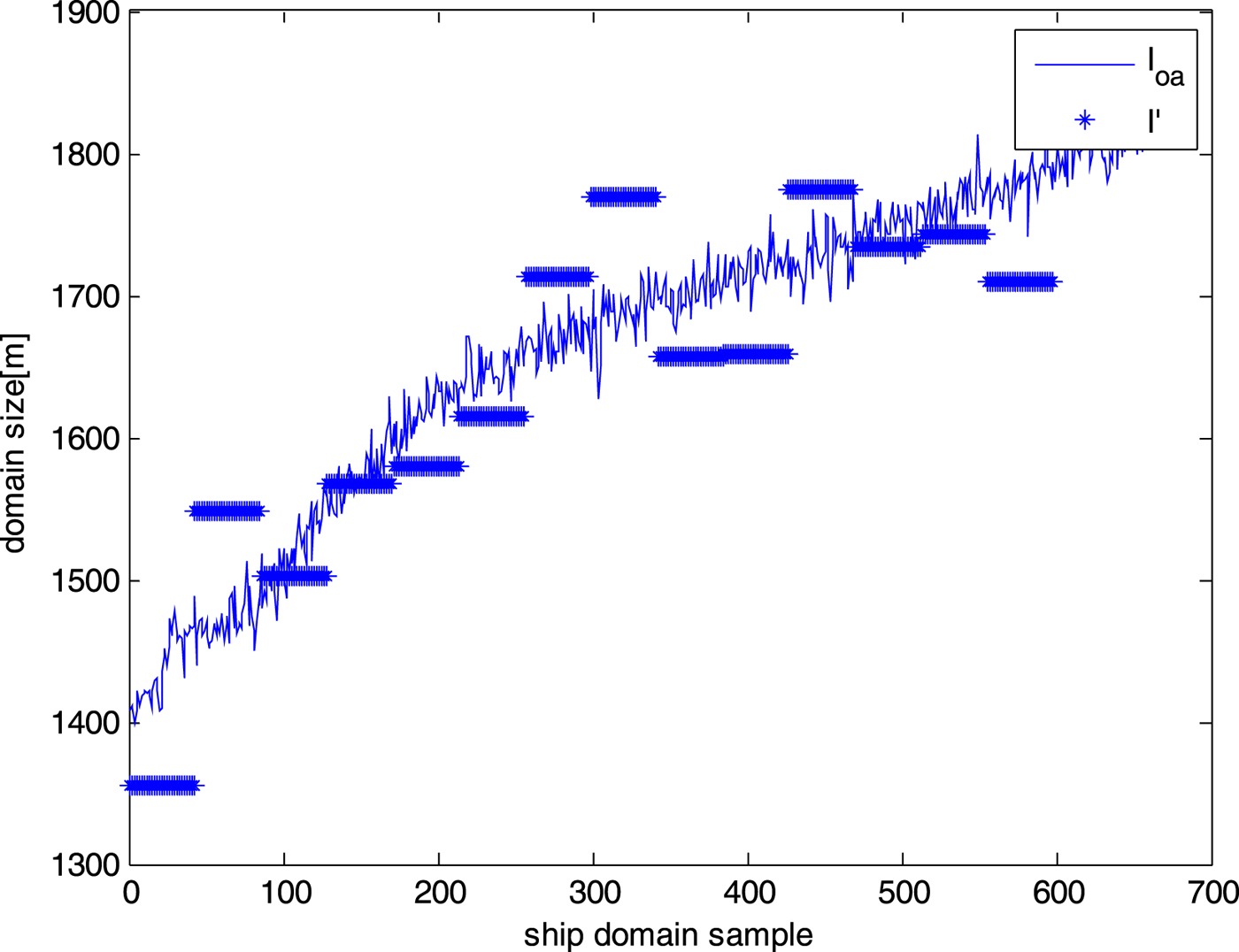
Figure 7. Comparison of the estimated ship domain l oa of the model considering the factors of own ship and other ships with the statistical domain l′.
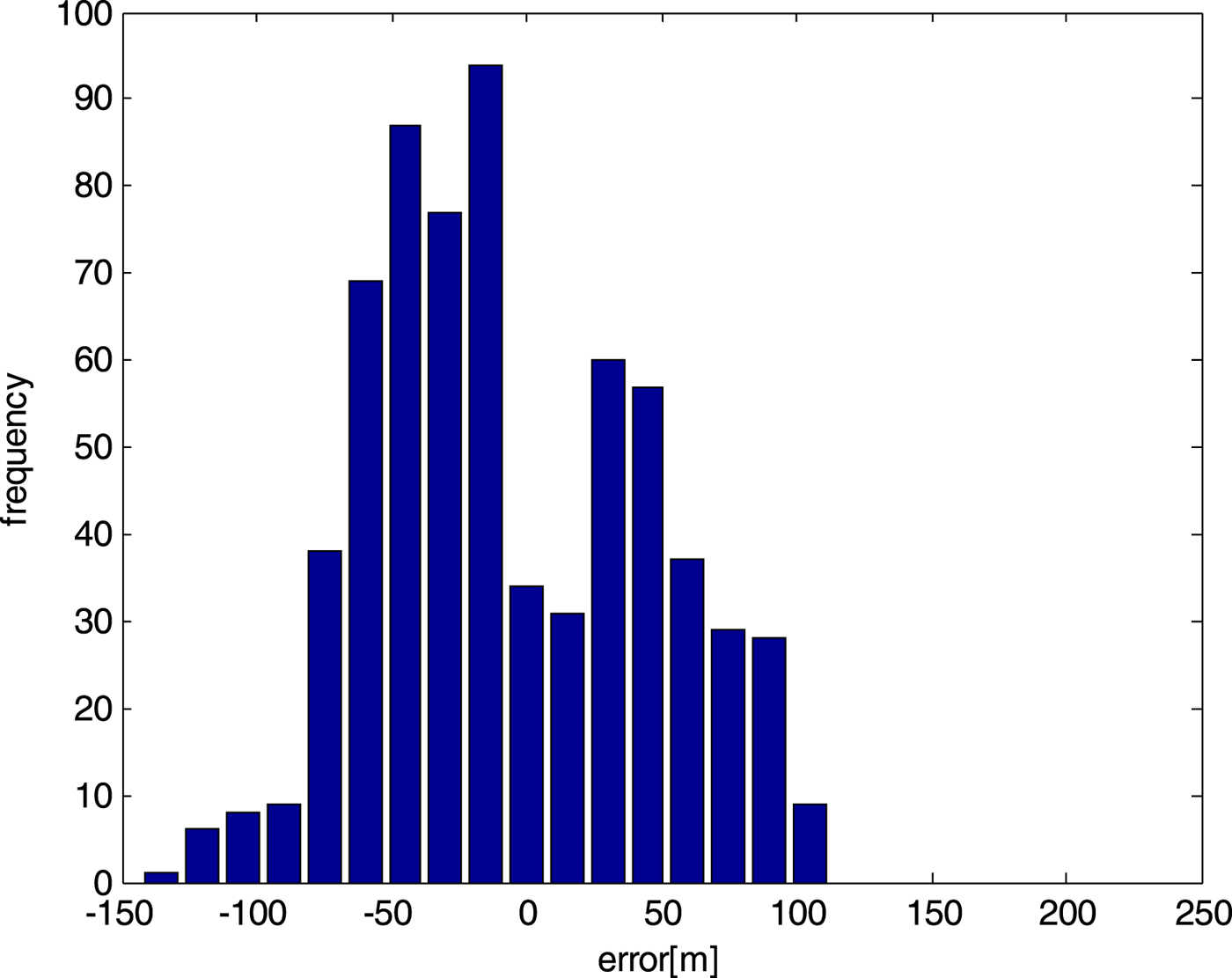
Figure 8. The errors of the estimated ship domain l oa of the model considering the factors of own ship, other ships, and the statistical domain l′.
4.3. Determination of the dynamic fuzzy ship domain considering factors of the central ship and other ships
The ship domain is an objective dynamic domain that distinguishes the area around a ship into different levels of safety. Whereas the safety level is subjectively defined, the dynamic fuzzy ship domain considering factors of the central ship and other ships can be similarly obtained by the method of Zheng and Wu (Reference Zheng and Wu2001) for the spatial collision risk based on the human psychology formula, and the fuzzy domain model is obtained as Equation (8).
 $$r = \left\{ {\matrix{ 1 \hfill & {d_{DRB_i} < d_1} \hfill \cr {{\left( {\displaystyle{{d_2-d_{DRB_i}} \over {d_2-d_1}}} \right)}^{3\cdot 03}} \hfill & {d_1 \le d_{DRB_i} \le d_2\quad (i = 1,2,\cdots ,n)} \hfill \cr 0 \hfill & {d_{DRB_i} > d_2} \hfill \cr } } \right.$$
$$r = \left\{ {\matrix{ 1 \hfill & {d_{DRB_i} < d_1} \hfill \cr {{\left( {\displaystyle{{d_2-d_{DRB_i}} \over {d_2-d_1}}} \right)}^{3\cdot 03}} \hfill & {d_1 \le d_{DRB_i} \le d_2\quad (i = 1,2,\cdots ,n)} \hfill \cr 0 \hfill & {d_{DRB_i} > d_2} \hfill \cr } } \right.$$The parameters d 1 and d 2 should be determined as follows. We set:
 $$\left( {\displaystyle{{d_2-d_{DRBi0}} \over {d_2-d_1}}} \right)^{3\cdot 03} = 0\cdot 5\quad (i = 1,2,\cdots ,n)$$
$$\left( {\displaystyle{{d_2-d_{DRBi0}} \over {d_2-d_1}}} \right)^{3\cdot 03} = 0\cdot 5\quad (i = 1,2,\cdots ,n)$$ $$d_{DRBi0} = f_{1i} (S_0, EA, L_0, D, T_0, S_{a}, L_{a}, T_{a}) \quad (i = 1, 2, \cdots, n)$$
$$d_{DRBi0} = f_{1i} (S_0, EA, L_0, D, T_0, S_{a}, L_{a}, T_{a}) \quad (i = 1, 2, \cdots, n)$$where:
 $$d_{1} = \min (d_{{DRBi}}) \quad (i = 1,2,{\ldots},n)$$
$$d_{1} = \min (d_{{DRBi}}) \quad (i = 1,2,{\ldots},n)$$ $$d_{2} = \max (d_{{DRBi}}) \quad (i = 1,2,{\ldots},n)$$
$$d_{2} = \max (d_{{DRBi}}) \quad (i = 1,2,{\ldots},n)$$Ship domain is the area a navigator wants to keep clear of others, primarily for the purpose of guaranteeing safety. According to the characteristics of ship navigation, ships passing safely should satisfy the condition that the smallest distance between them is greater than the distance of the ships close to each other during the avoidance process; they should also not be threatened by other ships' wake waves. In addition, the uncertain region of the ship's fluctuation should be considered.
Hence, the distance required for the ships to just pass safely is selected as the smallest ship domain, and it can be described as follows:
 $$d_{1} = \Delta d_{{DRBi}} + D_{w} + L + L_{c}$$
$$d_{1} = \Delta d_{{DRBi}} + D_{w} + L + L_{c}$$where Δd DRBi are the uncertain regions of the ship's fluctuation; D w is the largest distance within which a ship's waves will threaten others' safety; L is the ship's size and L c is the distance of the ships close to each other during the avoidance process.
D w and Δd DRBi are determined as per Abdel (Reference Abdel1981). L c is based on the collected statistics and is set as quadruple the ship length. According to Equations (9), (10) and (13), d 2 can be obtained after d 1 is determined.
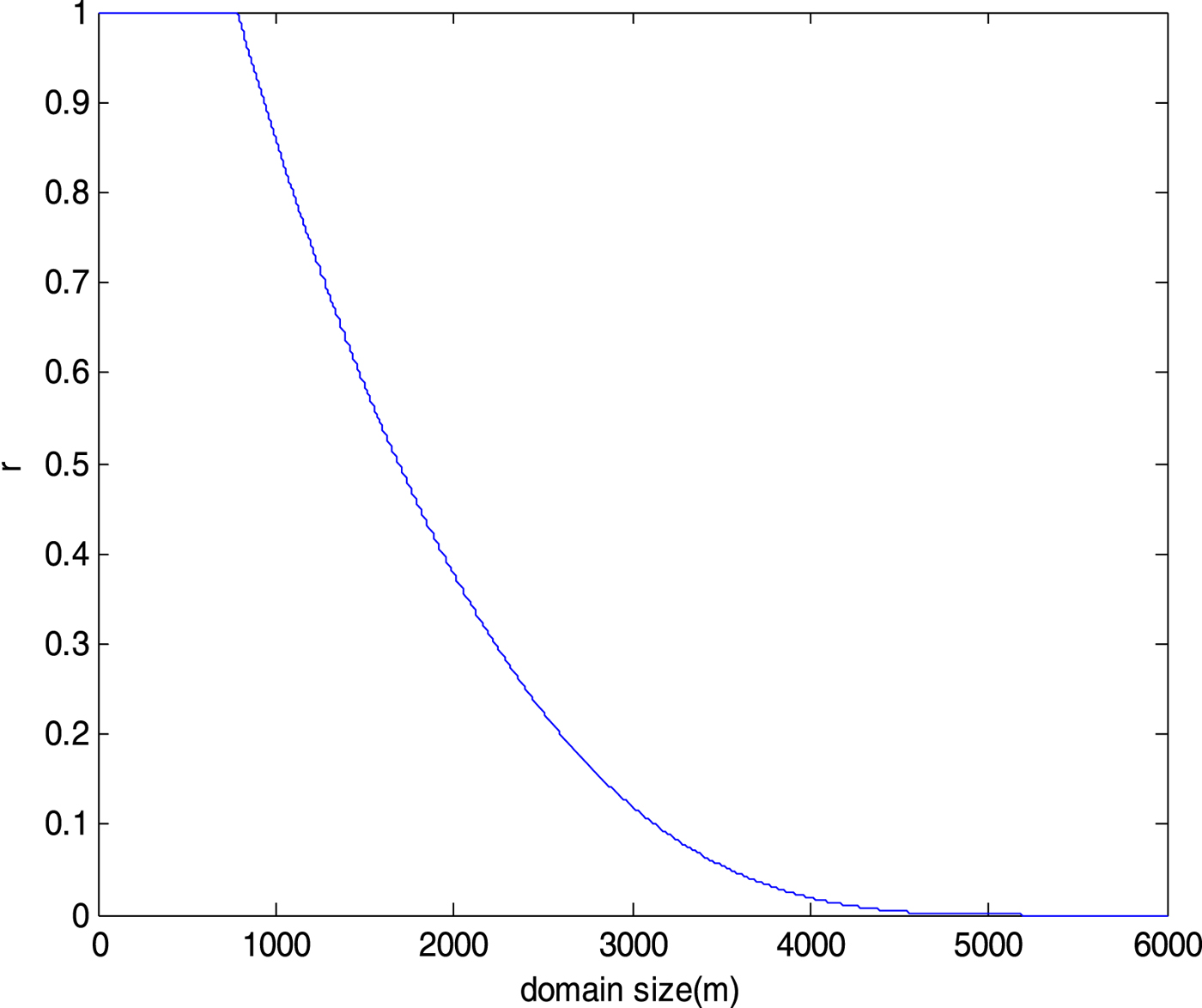
The safety level r changes with the size of the domain obtained, as the experiment was conducted based on a set of data (Table 3) selected from the samples. The results show that the safety level increases with increasing domain size, and the rate of increase rate decreases (Figure 9). The results are in accordance with realistic scenarios.
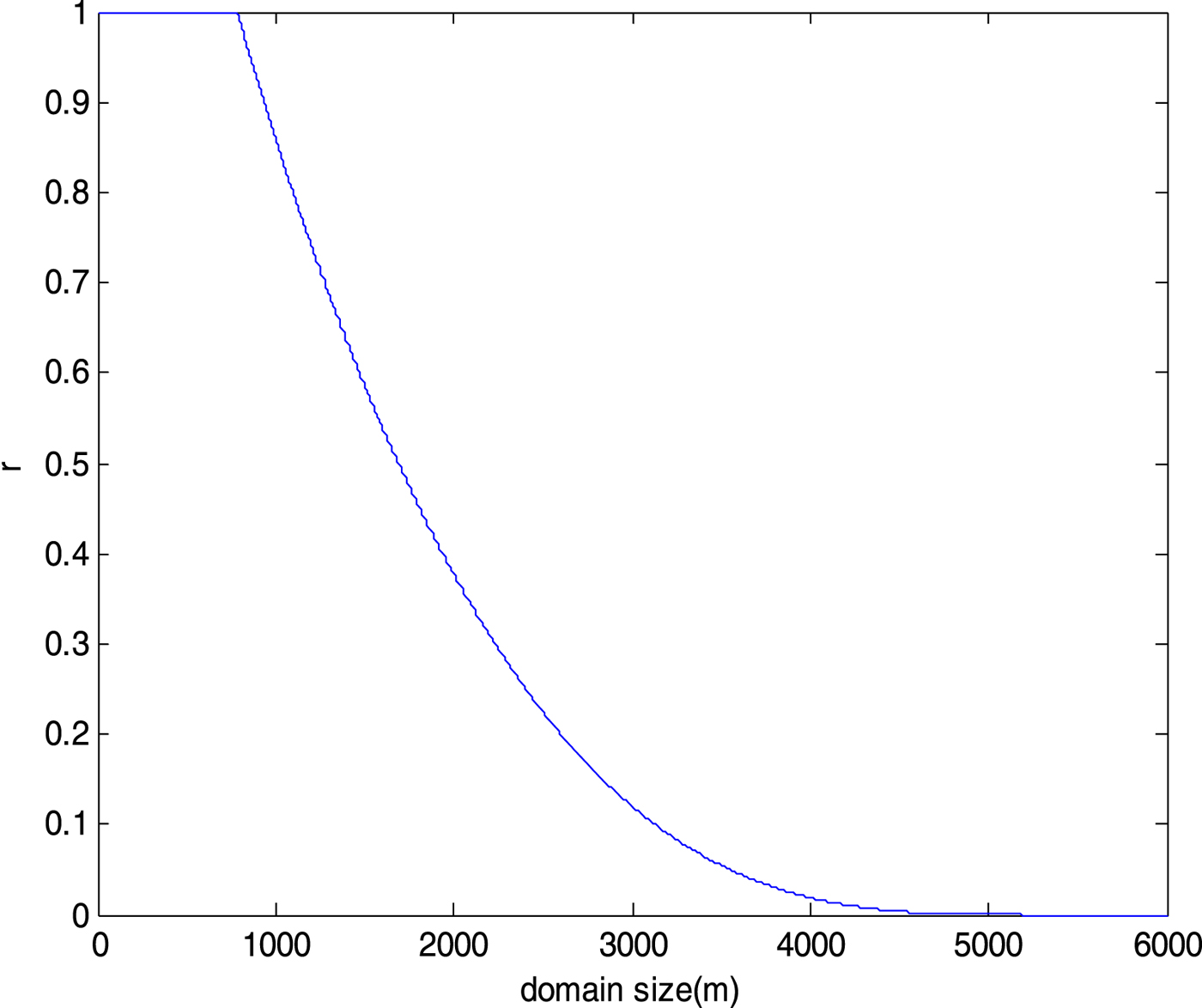
Figure 9. Safety degree r for different domain sizes.
Table 3. Data used for calculating d 1 and d 2.

4.4. Determination of the dynamic fuzzy ship domain
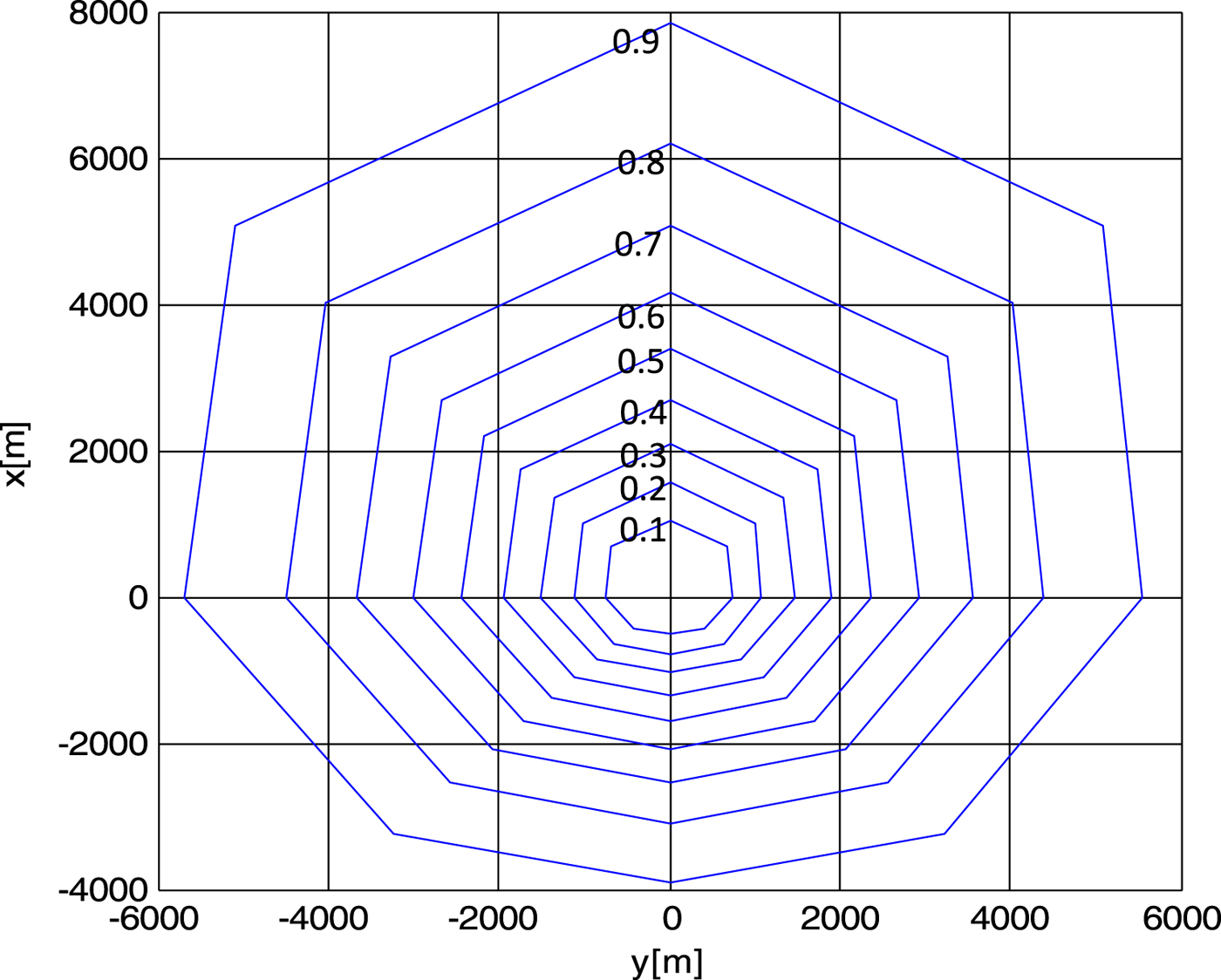
Two aspects are involved in determining the ship domain: size and shape. The size of the ship domain is determined in this paper, and the shape of the domain references the study of Pietrzykowski and Uriasz (Reference Pietrzykowski and Uriasz2009). A dynamic fuzzy ship domain is obtained as shown in Figure 10, with the data given in Table 3.
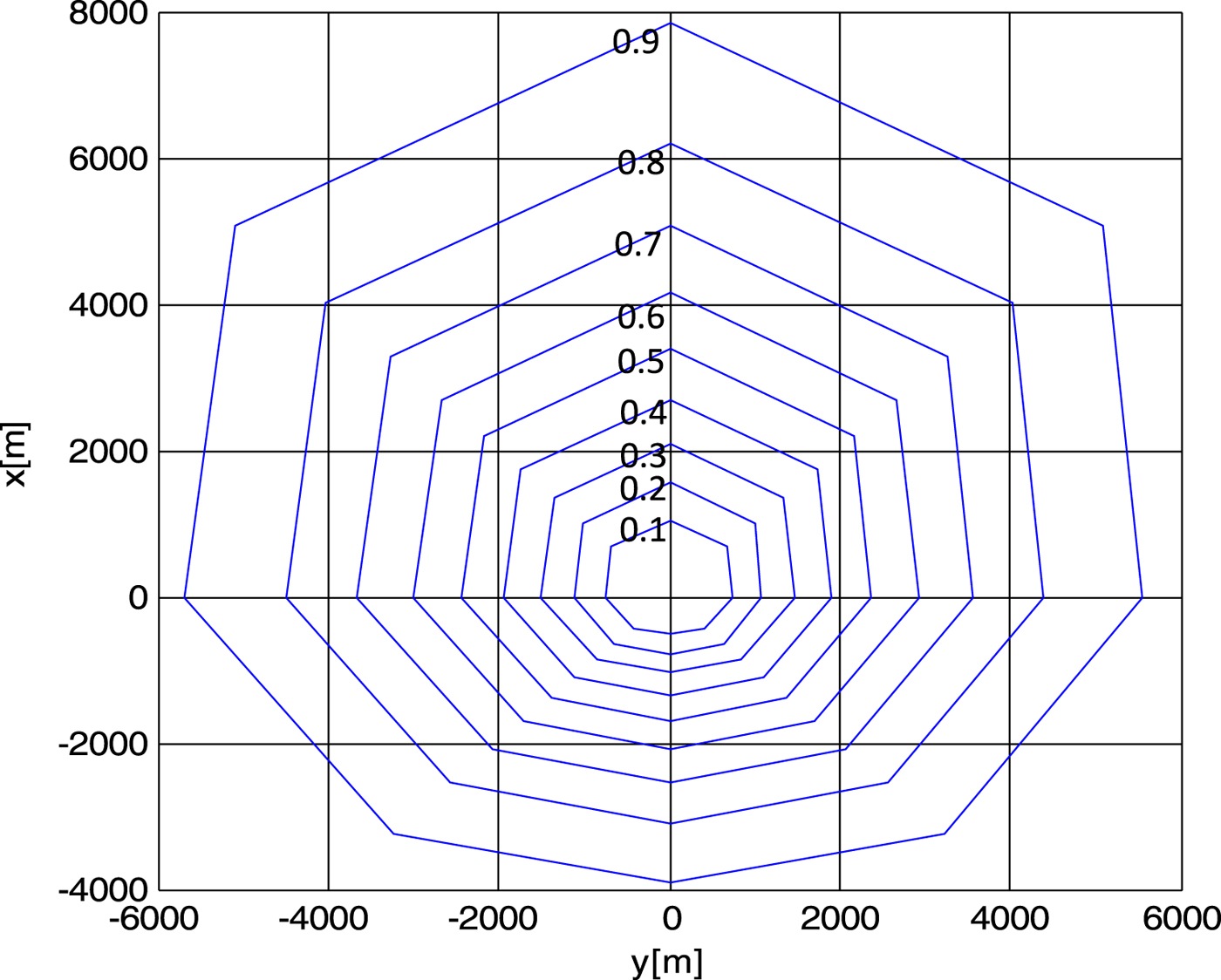
Figure 10. The dynamic fuzzy ship domain considering the factors of the central ship and other ships under different safety levels.
5. DISCUSSION
5.1. Analysis of the accuracy between the ship domain established considering the factors of own ship and other ships and the ship domain established considering only the factors of own ship
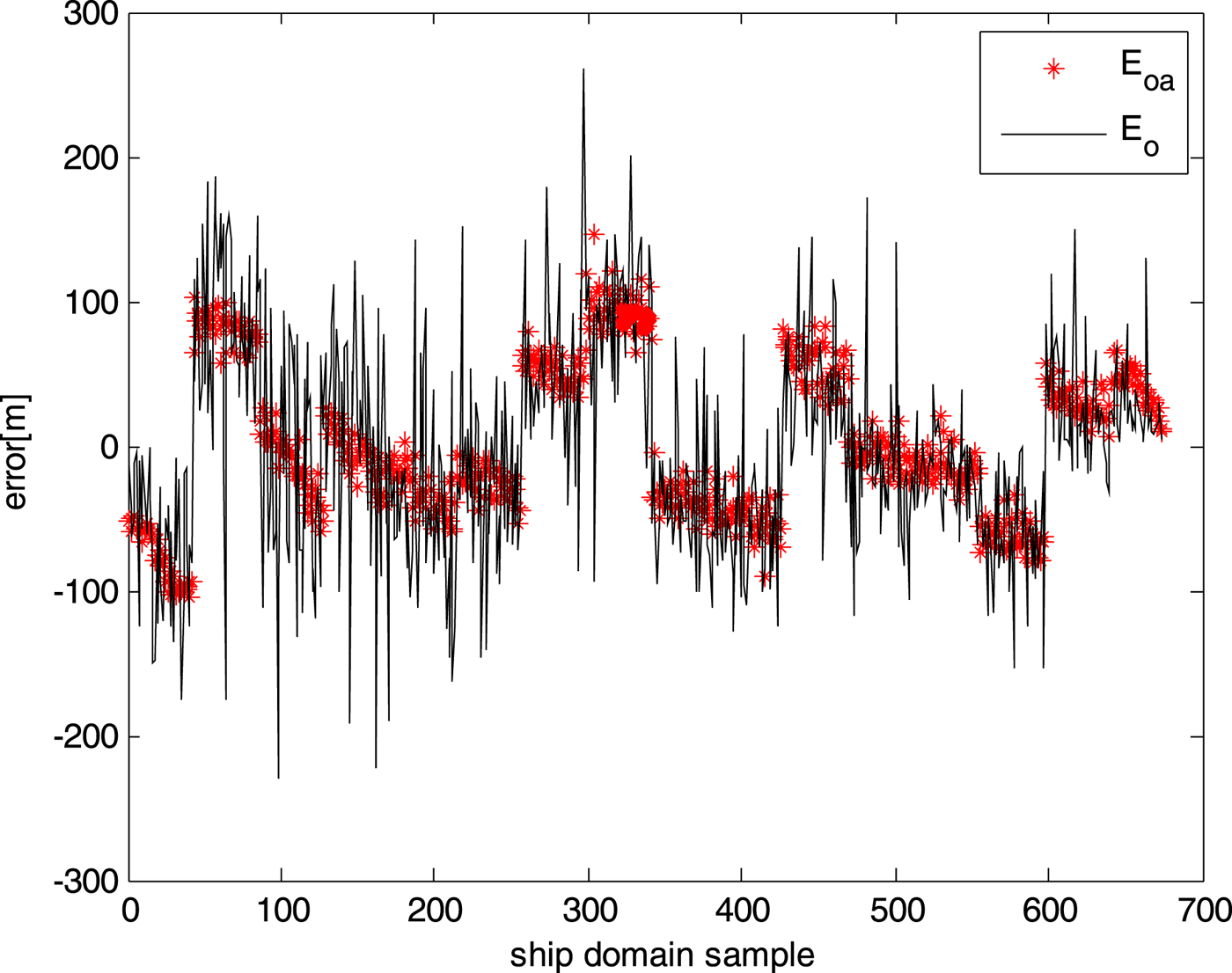
To validate the advantages of the ship domain established considering the factors of own ship and other ships, domains are obtained based on the same training samples; then, the same test samples are used for testing their accuracy. The factors considered when modelling the ship domain from the perspective of own ship are S o, T o, L o, D and EA. The results of the network response for the input vectors of the test sample compared with the statistical ship domain are shown in Figure 11, and the errors are given in Figure 12. It is apparent that the fluctuation of l oa is less than that of l o (Figure 11), and the errors of l oa with the statistical domain are less than those of l o with the original data (Figure 12). Therefore, the accuracy in estimating the ship domain of the domain established considering the factors of own ship and other ships is better than that of the domain established considering the factors of own ship only.
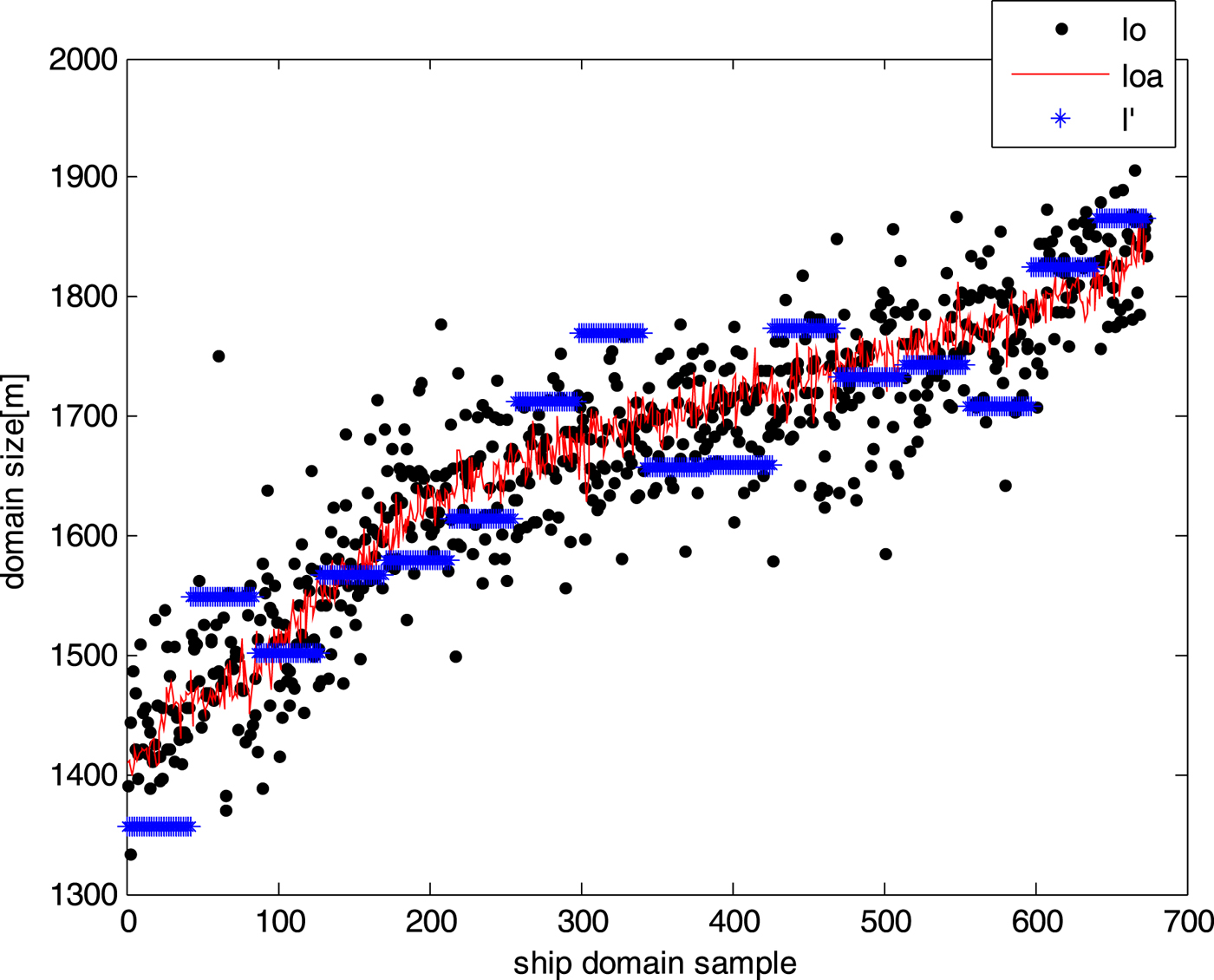
Figure 11. Comparison between the estimated domain size l oa, l o and the statistical ship domain size l ′; l oa is the estimated domain size of the model established considering the factors of the central ship and other ships; l o is the estimated domain size of the model considering the factors of the central ship.
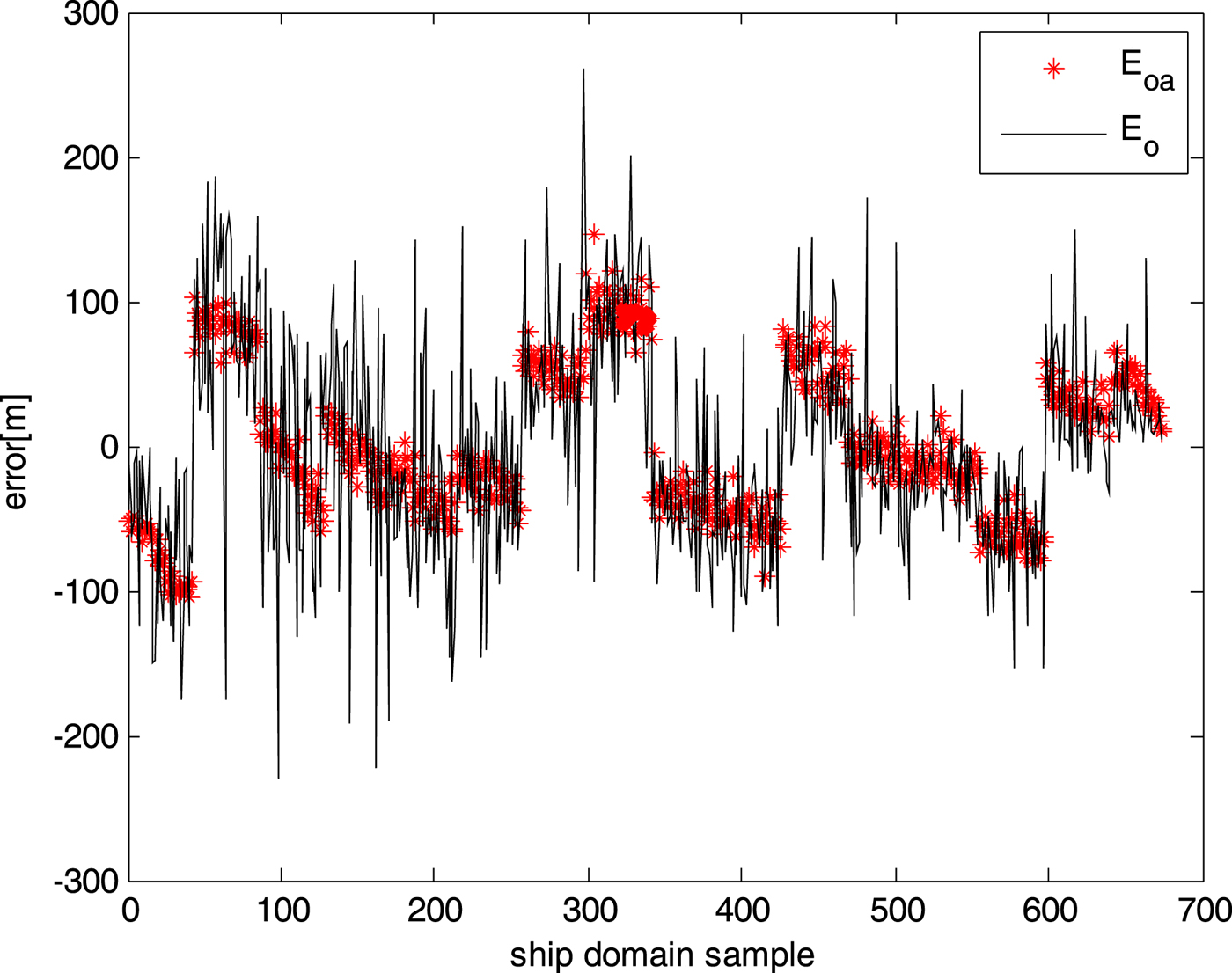
Figure 12. Comparison of the errors between Eoa and Eo; Eoa is the error of l oa with the statistical ship domain, and Eo is the error of l o with the statistical ship domain.
5.2. Analysis of the rationality of the ship domain established considering the factors of own ship and other ships
In this section, a further analysis of the rationality of the model is made by discussing the changes occurring with the ship domain when the central ship encounters other ships. It can then be proven that the ship domain established considering the factors of own ship and other ships has practical implications.
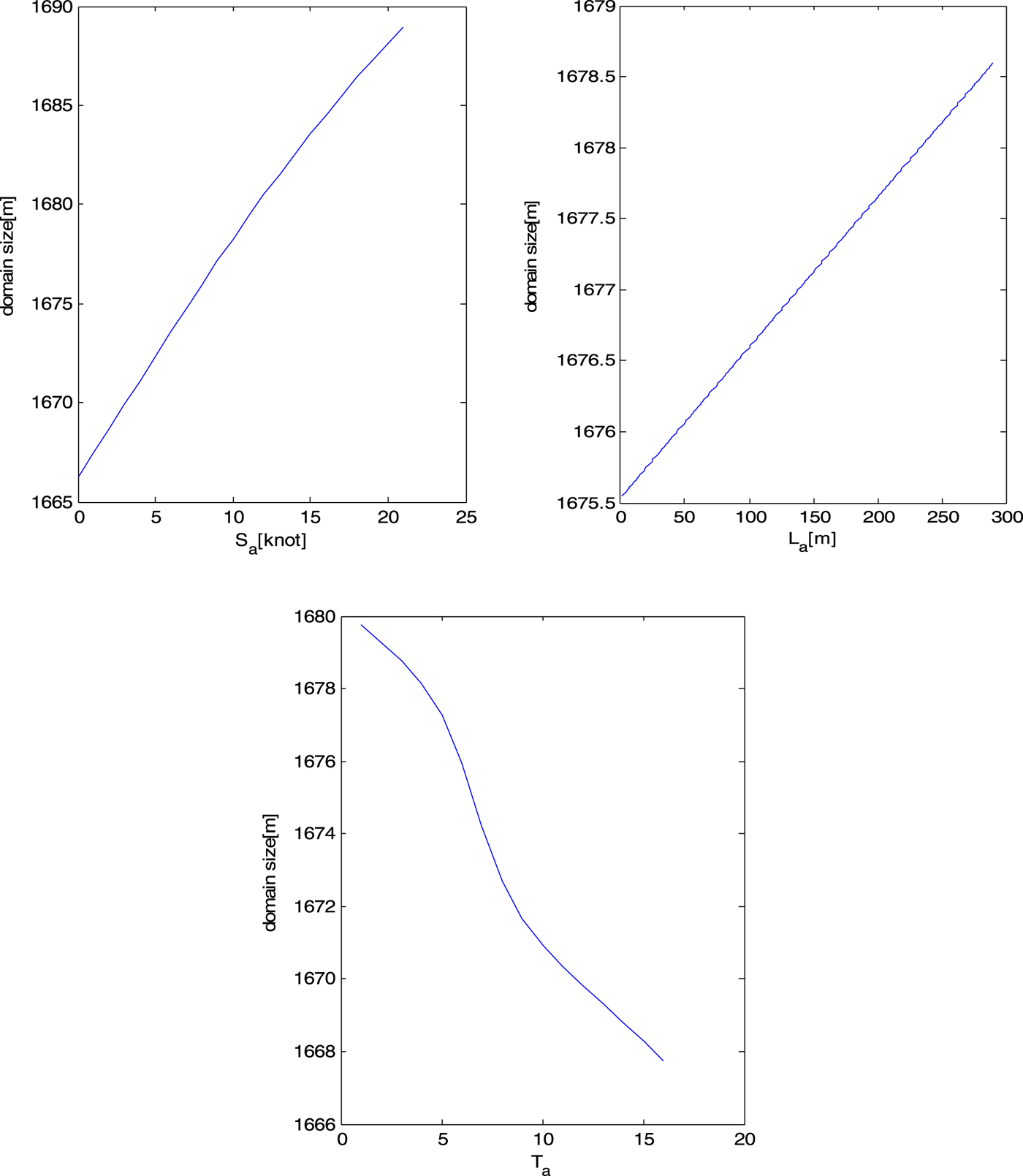
First, the ship domain changes with the factor of ship speed of the other ship (Figure 13), while the other factors are stationary; the data are as per Table 3. The experimental results show that the ship domain changes in accordance with the factors (ship speed, ship size and ship type) associated with the other ships. The ship domain is a fixed one even as other ships change when the domain model only considers factors of own ship. Therefore, the factors associated with the other ships encountering the central ship also influence the size of the ship domain.
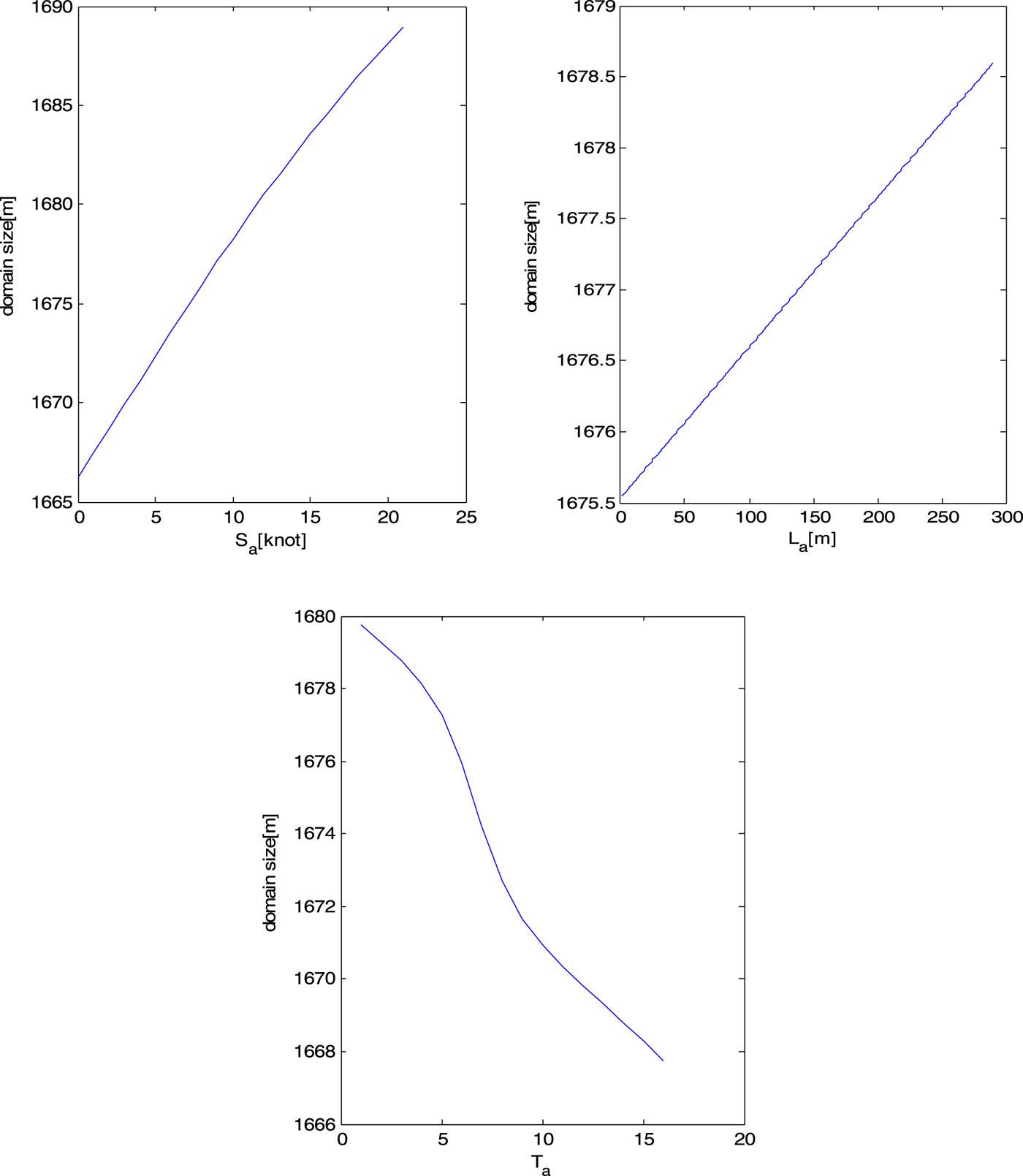
Figure 13. Changes of the ship domain and the factors associated with the ship encountering the central ship.
Second, a comparison of the safety levels of the ship domains of the two models are made using the data related to own ship and other ships as given in Table 4, and other data as shown in Table 3. The result shows that the risks measured by the two models of the same domain size are different (Figure 14) as the other ship's level factor changes. Hence, the factors associated with the ships encountering the central ship have an influence on the risk of the ship domain.
Figure 14. Safety level of the ship domain. d DRBio is the domain of the model considering the factors of own ship; d DRBioa1 and d DRBioa2 are the domains of the model considering the factors of own ship and other ships with different data.
Table 4. The factors of own ship and other ship samples.
6. CONCLUSIONS
In this article, we propose a new dynamic fuzzy ship domain established from the perspective of the encountering ships considering factors associated with those ships. The new ship domain is dynamic and fuzzy and can assess collision risk from individual encountering ships. The ship domain was obtained by the methods of wavelet decomposition and BP neural network based on AIS data, with the factors selected being more reasonable and the complexity of the study reduced. At the same time, the accuracy and the efficiency of the model are assured. The fuzzy ship domain was obtained by defining domains under different safety levels based on the formulae of human psychology, which can assess the safety of the ship domain. The study shows that the domain established considering factors associated with encountering ships is reasonable and meaningful. At the same time, the model exhibits good performance in estimating the ship domain, with accuracy better than that of domain models built from the perspective of the central ship. However, how the ship domain changed with different water types and whether this ship domain model can be used for different traffic environments remains to be resolved before this dynamic ship domain model can be used for ships under any circumstances to provide more accurate information for navigators and prevent the occurrence of dangerous encounters.