1. INTRODUCTION
Recently, lunar exploration has aroused great interest of the public again. After a series of successful lunar missions (Li et al., Reference Li, Hu, Huang, Wang, Jiang, Zhang, Cao and Xin2012; Fan et al., Reference Fan, Hu, Dong, Huang, Cao, Tang, Li, Chang and Yu2015; Liu et al., Reference Liu, Cao, Cheng, Peng and Tang2017), China has landed Yutu-2 on the far side of the Moon successfully in December 2018 and is planning for another Chang'E mission (Li et al., Reference Li, Wang, Wei and Lin2019); the USA has proposed a plan called LOP-G (Lunar Orbital Platform-Gateway) (Coderre et al., Reference Coderre, Edwards, Cichan, Richey, Shupe, Sabolish, Ramm, Perkes, Posey and Pratt2018). Some private companies have also shown their ambition for lunar exploration (Shammas and Holen, Reference Shammas and Holen2019). With so many missions to the Moon, communication/navigation (CN) facilities on the surface or in the vicinity of the Earth show their limitations, especially for missions at the poles and the far side of the Moon. With such a background, we have arrived at the era of extending current CN facilities from the Earth's side to the Moon's side and even beyond.
Many researchers have carried out studies on this topic. These studies are based on different types of orbits, including classic Keplerian orbits around the Moon and special orbits in the Earth–Moon system, such as libration point orbits (LPOs) near collinear libration points (CLPs). Among the studies using Keplerian orbits, it should be noted that a six-satellite constellation was proposed by Lang and Meyer (Reference Lang and Meyer1995) and was later expanded by Carpenter et al. (Reference Carpenter, Folta, Moreau and Quinn2004). A three-satellite constellation of frozen lunar orbits providing continuous coverage of either the north or south polar regions was proposed by Ely (Reference Ely2005), and two constellations of six satellites were designed to provide 99·999% global coverage in a later study (Ely and Lieb, Reference Ely and Lieb2006). A lunar global positioning system (GPS) constellation utilising the Walker configuration composed of 18 satellites was designed by Romagnoli and Circi (Reference Romagnoli and Circi2010) and others. The current study, however, will not focus on the Keplerian orbits.
As for special orbits in the Earth–Moon system for the lunar CN constellation, the ones that have been mostly studied are the LPOs around the two CLPs L1 and L2. The disadvantage of LPOs is that they are far away from the Moon. However, advantages such as fewer satellites for lunar surface coverage, no interrupt between the CN satellite and Earth, and lower deployment fuel requirement make LPOs more appealing to researchers. The idea of utilising the LPOs around the Earth–Moon L2 point to provide continuous communications between the Earth and the far side of the Moon was first proposed by Farquhar (Reference Farquhar1967). Recently, this idea has been further exploited to design lunar CN constellations covering the south pole or the whole surface of the Moon. Grebow et al. (Reference Grebow, Ozimek, Howell and Folta2008) investigated constellations of different LPOs for lunar south pole coverage. Hamera et al. (Reference Hamera, Mosher, Gefreh, Paul, Slavkin and Trojan2008) investigated the feasibility of an evolvable lunar CN constellation by using small satellites on halo orbits. A lunar global positioning system (LGPS) was designed by using Lissajous (Romagnoli and Circi, Reference Romagnoli and Circi2010) or halo orbits (Circi et al., Reference Circi, Romagnoli and Fumenti2014) around both L1 and L2 points. Ren and Shan (Reference Ren and Shan2013) also discussed the idea of using LPOs for LGPS. Zhang and Xu (Reference Zhang and Xu2014) proposed some lunar CN constellations based on LPOs. Meng and Chen (Reference Meng and Chen2014) utilised vertical Lyapunov orbits near the L3 point to design a CN constellation.
The first half of this work is dedicated to a survey of one-fold coverage of the regional or global lunar surface by using halo orbits. Different cases for two-, three- and four-satellite constellations are studied. Studies find that the two-satellite case can cover either south or north polar regions but never both. The three-satellite case can cover both south and north polar regions but not the whole lunar surface. The four-satellite case can cover nearly 100% of the whole lunar surface. The halo orbits studied in this work are those with large out-of-plane amplitude, because these orbits have better coverage of the polar regions when compared with those with small out-of-plane amplitude. At the same time, their instability is weaker, which makes them preferable.
While having good coverage of the north/south poles, halo orbits with large out-of-plane amplitude have worse coverage of equatorial regions. To compensate for this deficiency, another special kind of orbit – distant retrograde orbits (DROs) – is proposed. The DROs lie in the Moon's orbital plane and thus has very good coverage of the lunar surface except for the polar cap. Different from the LPOs, the DROs exhibit very good stability properties, even in the ephemeris model (Bezrouk and Parker, Reference Bezrouk and Parker2017). In Liu et al. (Reference Liu, Hou, Tang and Liu2014), the DROs were first proposed to replace the LPOs in the lunar CN constellation. Our studies find that three satellites moving on planar DROs can cover more than 99·8% of the lunar surface, with permanent coverage gaps at the polar caps. Our studies also find that four satellites moving on spatial DROs can cover nearly 100% of the lunar surface.
By combining halo orbits with DROs, we propose a hybrid CN constellation composed of five satellites to provide 100% continuous one-fold coverage of the lunar surface.
The contributions of the current paper are three-fold. (1) Lunar CN constellations based on halo orbits with up to four satellites are carefully analysed. Such a systematic survey dedicated to one-fold coverage of the lunar surface, to the authors' knowledge, is seldom seen in the literature. (2) The coverage ability of the planar and spatial DROs is analysed. Also, as far as the authors know, no such analysis has been published previously. (3) A hybrid lunar CN constellation composed of five satellites with 100% one-fold coverage of the full lunar surface is proposed for the first time.
The paper is organised as follows. In Section 2, the basics of the halo orbits and the DROs are briefly introduced. In Section 3, the methodology for coverage analysis is presented. In Section 4, a detailed coverage analysis of the halo orbits is performed. In Section 5, a detailed coverage analysis of the DROs is performed. In Section 6, a strategy to use halo orbits and DROs to build a lunar CN constellation is proposed and an example is given. Section 7 summarises the paper.
At this stage, the work is carried out in the circular restricted three-body problem (CRTBP) of the Earth–Moon system. Only periodic orbits are studied. This allows us to choose different types of orbits with the same period and restrict the coverage analysis of the CN constellation within this period. Of course, quasi-periodic orbits are allowed but will bring more complexity and we prefer to leave them for future studies.
2. HALO ORBITS AND DROs
2.1. Halo orbits
Halo orbits have been extensively studied in the literature, from both (semi-)analytical and numerical approaches (Richardson, Reference Richardson1980; Gómez, Reference Gómez2001). Due to the symmetry of the CRTBP, there are two families of halo orbit around each CLP – the north family and the south family (Jorba and Masdemont, Reference Jorba and Masdemont1999). They are symmetric to each other with respect to the x–y plane. Shown in Figure 1 are some examples of the north and south halo families around the points L1 and L2. Figure 2(a) shows the x–z projection of the south halo orbits around L1 and L2, along with the asterisks marking the uppermost points of the halo orbits. Originating from the critical planar Lyapunov orbit, the out-of-plane amplitude of the halo orbits first increases and then decreases, and the halo orbits of both L1 and L2 gradually approach the Moon, with their projections on the x–z plane gradually looking like straight lines. Using the z coordinate of the uppermost point as the amplitude parameter, Figure 2(b) shows the curves of the halo orbit's period. As can be seen, for L1 halo orbits, with the increase of out-of-plane displacement, the period first increases slightly. When the L1 halo orbits are getting closer to the Moon, the out-of-plane displacement decreases rapidly and so does the period. The basic behaviour of L2 halo family is very similar to that of the L1 halo family. For the halo orbits computed by us, the period of the L1 halo orbit ranges from about 8 days to 12 days. The period of the L2 halo orbit ranges from a little bit more than 4 days to approximately 15 days. Because we are going to choose orbits with the same period, we restrict the halo orbits in this work to have periods ranging from 8 days to 12 days.

Figure 1. The northern (red) and southern (blue) halo families about the Earth–Moon L1 (left) and L2 (right).

Figure 2. (a) The x–z projection of the south halo orbits and (b) the relationship between periods and z-amplitude at perilune.
2.2. DROs
A DRO is a special kind of periodic orbit in the CRTBP. In astronomy, people prefer to call them ‘quasi-satellite orbits’ and some natural small bodies move on these orbits (Kinoshita and Nakai, Reference Kinoshita and Nakai2007; Marcos and Marcos, Reference Marcos and Marcos2016). In celestial mechanics, the DRO family also has the name of family f in Strömgren's classification (Szebehely, Reference Szebehely1967). Although different names are used, they all represent the same family of orbits. In the Moon-centred synodic frame, Figure 3(a) shows some example DROs with different sizes. The black line in Figure 3(b) shows the curve of period versus amplitude of this family. The amplitude is defined as the distance between the Moon and the left vertical intersection of the DRO with the x axis. The period increases monotonically with the amplitude, from less than 1 day to more than 25 days. We denote the monodromy matrix associated with the DROs as M. Its eigenvalues are usually of the form  $\{1,1,\lambda _1,\lambda _1^{-1},\lambda _2,\lambda _2^{-1}\}$ (Gómez et al., Reference Gómez, Masdemont and Simó1998). We can define the stability indices as
$\{1,1,\lambda _1,\lambda _1^{-1},\lambda _2,\lambda _2^{-1}\}$ (Gómez et al., Reference Gómez, Masdemont and Simó1998). We can define the stability indices as  $s_i=\lambda _i+\lambda _i^{-1}$, i=1,2, so that the orbits are stable if |s i| < 2 and unstable if one of |s i| > 2 (Arnold, Reference Arnold2013). The red lines in Figure 3(b) show the two stability curves for this family. Obviously all the DROs shown in Figure 3 are stable in the CRTBP of the Earth–Moon system. One remark is that very large DROs are no longer stable in the real Earth–Moon system due to various perturbations (Xu and Xu, Reference Xu and Xu2009), but still DROs with sizes as large as 67,000 km with practical stability (for space missions) can be found (Bezrouk and Parker, Reference Bezrouk and Parker2017).
$s_i=\lambda _i+\lambda _i^{-1}$, i=1,2, so that the orbits are stable if |s i| < 2 and unstable if one of |s i| > 2 (Arnold, Reference Arnold2013). The red lines in Figure 3(b) show the two stability curves for this family. Obviously all the DROs shown in Figure 3 are stable in the CRTBP of the Earth–Moon system. One remark is that very large DROs are no longer stable in the real Earth–Moon system due to various perturbations (Xu and Xu, Reference Xu and Xu2009), but still DROs with sizes as large as 67,000 km with practical stability (for space missions) can be found (Bezrouk and Parker, Reference Bezrouk and Parker2017).

Figure 3. (a) DRO family; (b) period versus x amplitude (black) and stability indices of DROs (red).
The planar DROs are in the Moon's orbit plane, having good coverage of the lunar surface except for the poles. In order to also cover the poles, a small out-of-plane amplitude should be added to the planar DROs. There are two ways to generate a spatial orbit: one is to use the vertical m-bifurcation orbits (Hou and Liu, Reference Hou and Liu2013) bifurcating from critical planar DROs; the other is to simply add a small out-of-plane deviation to the planar DRO (Liu et al., Reference Liu, Hou, Tang and Liu2014; Bezrouk and Parker, Reference Bezrouk and Parker2017). The difference is that the former generates an exact periodic orbit while the latter usually generates a quasi-periodic orbit. As an example, Figure 4(a) shows two spatial periodic orbits (belonging to a 5- (blue) and 6-bifurcation (red) periodic family) bifurcating from the planar DRO orbit. Figure 4(b) shows a spatial quasi-periodic orbit by adding a deviation of 7000 km along the z direction. Since we only deal with periodic orbits in this study, we prefer the first way to generate a three-dimensional periodic orbit for the following analysis. A few more words are given about the m-bifurcation orbits. An m-bifurcation orbit in the planar DRO family is not a bifurcation orbit itself, but becomes a bifurcation one when it orbits m times (Henrard, Reference Henrard2002). So a 5-bifurcation planar DRO orbit travels five times in the x–y plane and a 6-bifurcation planar DRO orbit travels six times in the x–y plane. A new family of spatial periodic orbits appears, starting from the m-bifurcation orbit. We call the family an m-bifurcation periodic family. The ones shown in Figure 4(a) belong to the 5- and 6-bifurcation periodic family, respectively. More details on how to compute the m-bifurcation family can be found in the literature (Hou et al., Reference Hou, Xin and Feng2018).

Figure 4. Spatial DROs generated by m-bifurcation (a) and by simply adding a small out-of-plane deviation (b).
3. COVERAGE ANALYSIS METHODS
It is required to find a way to evaluate the quality of surface coverage. Two figures of merit are defined, namely the continuous Surface Coverage Percentage (SCP) and the Coverage Time Percentage (CTP).
3.1. Coordinate definition
Figure 5 shows the Moon-centred coordinate used in our coverage analysis. The x axis points from the Earth to the Moon, the z axis is perpendicular to the Moon's orbital plane, and the y axis completes the right-hand rule. The longitude/latitude is defined as the angle λ/φ in Figure 5, with λ ∈ [0°, 360°) and φ ∈ [ − 90°, 90°]. The north polar region is defined as φ ∈ [60°, 90°], and the south polar region is defined as φ ∈ [ − 90°, − 60°]. The elevation angle h between a point P on the Moon's surface and the CN satellite is also defined in Figure 5. A critical value of the elevation angle, h 0, is selected. The value h 0 is the minimum elevation angle for the visibility check. If h ≥ h 0, the CN satellite is visible to P, otherwise it is not visible. Since the Moon is atmosphereless, in our work, the value of h 0 is taken as 0°.

Figure 5. Illustration of the coordinates used in our analysis and the elevation angle h.
3.2. CTP and SCP
The CTP of a region refers to the time that the region is covered by at least one CN satellite divided by the total simulation time. The region is continuously covered if the CTP equals 100%.
The SCP indicates the ratio of the Moon's continuous one-fold coverage area to the total lunar surface. The continuous one-fold coverage area means the region where there is always at least one CN satellite visible. In order to compute the SCP, we discretise the lunar surface along both the longitude and latitude directions with a certain interval. To save computational time, we first set the interval as 10°. Once a CN constellation is found to be able to cover 100% of the lunar surface with such a coarse grid, we check whether the SCP is still 100% with a finer grid interval of 1°.
The area of each grid is approximately R 2cosφ ΔφΔλ, where R is the radius of the Moon, and Δφ = Δλ = 10° or 1°. The formula to calculate the SCP is:
 $${\rm SCP}=\frac{\sum_{i\in{S}} \delta{R^2\cos\varphi_{i}\,\Delta\varphi\Delta\lambda}}{\sum_{i\in{S}} {R^2\cos\varphi_{i}\,\Delta\varphi\Delta\lambda}},\quad \delta=\begin{cases} 0, & {\rm CTP}<100\%,\\ 1, & {\rm CTP}=100\%, \end{cases}$$
$${\rm SCP}=\frac{\sum_{i\in{S}} \delta{R^2\cos\varphi_{i}\,\Delta\varphi\Delta\lambda}}{\sum_{i\in{S}} {R^2\cos\varphi_{i}\,\Delta\varphi\Delta\lambda}},\quad \delta=\begin{cases} 0, & {\rm CTP}<100\%,\\ 1, & {\rm CTP}=100\%, \end{cases}$$where S indicates the grid for the whole lunar surface. For north or south polar region coverage, the same SCP value can be defined, with S replaced by the north or south polar area.
4. COVERAGE ANALYSIS I – HALO ORBIT
This section is devoted to the lunar surface coverage of halo orbits. We first study the case of one CN satellite, and then extend the studies to two, three and four CN satellites.
4.1. The case of one CN satellite
We study the north halo orbits around the L2 points first. The coverage property of the south halo orbits around the L2 points should be symmetric with the results of the north halo orbits. Therefore, we only study the north halo orbits here. Figure 6 shows the CTP map of the lunar surface for L2 north halo orbits with different out-of-plane amplitudes. From left to right and from top to bottom, the maximum out-of-plane displacement is 0 km, 1000 km, 10,000 km, 30,000 km, 50,000 km, 70,000 km, 77,828·208 km, 75,000·944 km and 67,056·001 km.

Figure 6. CTP map for a satellite moving on an L2 north halo orbit.
The bright yellow regions are the one-fold coverage areas while the dark blue ones are areas in which the CN satellite is never seen. Regions with other colours indicate that the CN is partially visible. Numbers on the lines represent the CTP. For example, 0·8 means that this region is covered for 80% of one orbital period.
For small out-of-plane amplitude halo orbits, they are closer to the L2 point, so the CN satellite is always visible to the far side of the Moon but never visible to the near side. With the period reducing, the out-of-plane amplitude increases. For the north halo orbits, the apoapsis is above the x–y plane, so they have better (worse) coverage of the northern (southern) area. Results in Figure 6 suggest the use of shorter-period halo orbits with large out-of-plane amplitude in the CN constellation if we need coverage of the polar region. For halo orbits around the L1 point, similar phenomena can be expected and the details are omitted.
4.2. The case of two CN satellites
Now we extend the analysis to the case of two CN satellites. There are in total 10 possible combinations, as listed in Table 1. Due to symmetry, cases 1, 3, 5 and 7 are symmetric to cases 2, 4, 6 and 8, respectively. As a result, we only need to discuss six cases in total, that is, cases 1, 3, 5, 7, 9 and 10.
Table 1. The 10 kinds of CN constellations with two CN satellites on halo orbits.

For each case, there are two free parameters to describe the CN constellation: one is the period T (or the amplitude) of the halo orbits; the other is the initial phase difference Δτ between the two CN satellites. To illustrate the initial phase difference, we divide each halo orbit into N segments with a fixed time interval (in this part, N=100). That is, the time interval between two nearby points is T/N. For L1 south halo orbits and L2 north halo orbits, starting from the uppermost point, we use one parameter τ j = j/N (j=0, 1, …, N-1) to describe different points on the halo orbit. For the L1 north halo orbits and L2 south halo orbits, starting from the lowermost point, we use the same parameter to describe different points on the orbit. That is to say, when τ = 0, the satellite is at the uppermost point if the orbit is an L1 south or an L2 north halo orbit, and is at the lowermost point if the orbit is an L1 north or an L2 south halo orbit. The definition of the reference point when τ = 0 remains the same in the following analysis and will not be repeated again. At the initial epoch, suppose the position of the first CN satellite on the halo orbit is τ1, and the position of the second CN satellite on the halo orbit is τ2, then the initial phase difference is defined as Δτ1,2 = τ2 − τ1. Obviously, Δτ1,2 ∈ [0, 1]. There are in total six cases to be investigated, and for each case there are two free parameters. Thus figures such as Figure 6 are no longer valid to present the results, so we choose the SCP to show the results, as shown by Figure 7. For each fixed value of T, we survey the parameter Δτ1,2 in [0, 1] to get the maximum value of the SCP.

Figure 7. Maximum SCP of different cases of two-satellite constellation moving on halo orbits.
The results are shown in Figure 7, where the abscissa represents the period of the CN constellation, and the ordinate represents the maximum SCP value that the CN constellation can have. The lines with red triangles represent the maximum SCP of the north polar region, the black lines represent the maximum SCP of the south polar region, and the green line represents the maximum SCP of the equatorial region.
An obvious fact from Figure 7 is that the north polar region can be covered completely in cases 1, 3 and 5 and the south polar region can be covered completely in case 7. Cases 2, 4, 6 and 8 are symmetric to cases 1, 3, 5 and 7, so the north or south polar region can be completely covered in these cases. Hamera et al. (Reference Hamera, Mosher, Gefreh, Paul, Slavkin and Trojan2008) proposed a constellation similar to case 4, i.e. two satellites in an L2 south halo orbit, to provide continuous south pole coverage. Another fact is that continuous one-fold coverage of both the north and the south polar regions is impossible with only two satellites on halo orbits.
4.3. The case of three CN satellites
There are 20 options for the three-satellite CN constellation in total. They are listed in Table 2. However, considering the symmetry, only the first 10 cases are necessary to be studied.
Table 2. The 20 kinds of CN constellation with three CN satellites on halo orbits.

For each case, there are three free parameters to describe the CN constellation: the period T, and the initial phase differences Δτ1,2 and Δτ1,3. Similar to the case of two satellites, we can survey Δτ1,2 and Δτ1,3 in [0, 1] and find the maximum SCP, as shown in Figure 8. It can be found that for all cases the north polar region can be covered continuously. In cases 5 and 10, the north and the south polar regions can be simultaneously covered.

Figure 8. Maximum SCP of different cases of three-satellite constellation moving on halo orbits.
One example three-satellite 10-day constellation is shown in Figure 9(a). The three satellites move on L1N, L2N and L2S, respectively. As a result, this is an example of case 10. The period of this example constellation is T=10 days. The initial phases are τ1 = 0, τ2 = 0 and τ3 = 0.5. Figure 9(b) shows the CTP map. Obviously, the two polar regions are covered continuously while equatorial regions are only partially covered. An animation of the coverage in one orbital period is given in supplementary files. Figure 10 shows some snapshots of the coverage during one orbital period, where the blue region indicates the coverage gap. It is obvious that the coverage gap remains close to the equatorial region and moves from east to west. From the following analysis, we know that this coverage gap can be perfectly compensated by CN satellites moving on DROs, since these orbits also move from east to west around the Moon and have good coverage of the equatorial regions.

Figure 9. One example three-satellite constellation and its CTP.

Figure 10. Some snapshots of the coverage during one orbital period.
4.4. The case of four CN satellites
Next we extend the results to four satellites. There are 35 kinds of constellations in total. Due to symmetry, 19 of them are necessary to be studied. They are listed in Table 3. Cases 1 to 19 are studied. The other cases are symmetric to them. To be specific, case i is symmetric to case i−19 when 20 ≤ i ≤ 25; case i is symmetric to case i−18 when 26 ≤ i ≤ 29; and case i is symmetric to case i−17 when 30 ≤ i ≤ 35.
Table 3. The 35 kinds of CN constellation with four CN satellites on halo orbits.

For each case, there are four free parameters: the period T, and the initial phase differences Δτ1,2, Δτ1,3 and Δτ1,4. We first set a coarse grid interval as 10°. Similar to the above, we can survey Δτ1,2, Δτ1,3 and Δτ1,4 in [0, 1] and get the maximum value of SCP, as shown in Figure 11 (corresponding to the coarse grid interval).

Figure 11. Maximum SCP of different cases of four-satellite constellation moving on halo orbits.
In most cases, global coverage cannot be achieved, but in cases 9, 17 and 19, at several certain periods 100% global coverage could be achieved. However, when a finer grid interval of 1° is used, none of them can perfectly reach 100%. As shown in Figure 12, the blue line indicates the results of the coarse grid interval, and the red line indicates the results of the fine grid interval. Several points on the blue lines reach 100% but they cannot reach 100% on the red lines. Therefore, four satellites on halo orbits could provide nearly global coverage of the lunar surface but not perfectly 100%.

Figure 12. Comparison of maximum SCP of cases 9, 17 and 19 for the coarse and fine grid intervals.
5. COVERAGE ANALYSIS II – DRO
Besides halo orbits, DRO is another kind of candidate orbit for CN constellations. In this section, both planar DROs and spatial DROs are investigated.
5.1. Planar DROs
From Section 2.2, we know that planar DROs are in the Moon's orbital plane, so they have good coverage of the Moon's equatorial region but poor coverage of the polar regions. The coverage characteristics of one, two and three DRO satellites (period 10 days) are shown in Figure 13. The satellites are moving on the same DRO but with a phase difference. For readers to check the result, the initial conditions of this DRO is given in the Moon-centred synodic coordinates as
 $$\vec{r}({\rm km})=(-53{,}080{\cdot}461369,0,0)^T, \quad \vec{v}({\rm km/s})=(0,0{\cdot}490681,0)^T .$$
$$\vec{r}({\rm km})=(-53{,}080{\cdot}461369,0,0)^T, \quad \vec{v}({\rm km/s})=(0,0{\cdot}490681,0)^T .$$One DRO satellite can provide less than 50% coverage of the equatorial region. Two satellites on a DRO can provide a CTP larger than 90% for the equatorial region. To completely cover the equatorial region, at least three satellites are needed. It is found that three satellites equally phased on a DRO can continuously cover 99·8% of the lunar surface. An obvious fact from Figure 13 is that the polar caps cannot be covered, due to the fact that the planar DROs are used. This problem can be solved in two ways: one way is to utilise the spatial DROs to provide coverage of the polar regions; another way is to combine the planar DROs with halo orbits. The latter will be discussed later.

Figure 13. CTP map for one, two and three satellites moving on a 10-day DRO.
5.2. Spatial DROs
As illustrated in Section 2.2, we use spatial periodic DROs in this section to perform the coverage analysis. We pick up some members of the 5- and 6-bifurcation DRO families (see Figure 4(a)). The same as what we did in Section 4.4, for each fixed T, we survey Δτ1,2, Δτ1,3 and Δτ1,4 in [0, 1] to find the maximum SCP value. Studies show that the whole lunar surface can be continuously covered in this case if the lunar surface is discretised by 10° × 10°. Figure 14(a) and 14(b) shows the corresponding four-satellite results for the 5-bifurcation and 6-bifurcation families, respectively. However, SCP will not achieve 100% when the lunar surface is discretised by 1° × 1°. As can be seen from Figure 15, the maximum SCP has decreased to less than 100%. In Figure 15(b), the maximum SCP is about 99·975% when the period is about 64·5 day. As a result, the conclusion is that a four-satellite constellation on a DRO is able to cover nearly the whole lunar surface. It should be noted that the period of spatial DROs is far more than that of planar DROs. This is because the spatial DROs are 5- or 6-bifurcation of planar DROs. That means the total period of a spatial DRO is 5 or 6 times of the planar period of a spatial DRO.

Figure 14. Maximum SCP of four-satellite constellation moving on a DRO.

Figure 15. Comparison of maximum SCP of the four-satellite constellation moving on the spatial DRO for the coarse and fine grid intervals.
6. LUNAR CONSTELLATIONS BASED ON HALO PLUS DRO
From the studies in the above two sections, we know that halo orbits have good coverage of the polar regions, while the DROs have good coverage of the equatorial regions. An intuitive idea is to combine the two to build a hybrid CN constellation. To save our efforts, we only consider planar DROs. Since the polar region coverage is fulfilled by halo orbits, according to studies in Section 4, at least three halo orbiters are required. As a result, we consider two cases in this section: case (1) a four-satellite CN constellation composed of three halo satellites and one DRO satellite; and case (2) a five-satellite CN constellation composed of three halo satellites and two DRO satellites.
6.1. Three halo satellites and one planar DRO satellite
Since we only have one DRO satellite, the configuration of the constellation is up to the choice of the three halo satellites. The same as the case in Section 4.3, there are 20 cases of constellations in total, as described by Table 2. Also, only the first 10 cases need to be studied due to symmetry.
There are four free parameters to describe the CN constellation for each case: the period T, and the initial phase differences Δτ1,2 between the halo CN satellites 1 and 2, Δτ1,3 between the halo CN satellites 1 and 3, and Δτ1,4 between the halo CN satellite 1 and the DRO CN satellite. For the DRO, the starting point of the phase lies on the Earth–Moon line between the Earth and the Moon. We can survey Δτ1,2, Δτ1,3 and Δτ1,4 in [0, 1] and find the maximum SCP of the north polar, south polar and equatorial regions and of the whole lunar surface. The results are shown in Figure 16. According to Figure 16, it seems that case 10 performs best in terms of whole lunar surface coverage. However, even for this best case, the maximum SCP is about 99·8%, a little bit less than 100%. This means that the configuration of three halo satellites and one DRO satellite cannot completely fulfil the goal of one-fold coverage of the whole lunar surface. We need another DRO satellite to fulfil this goal.

Figure 16. Maximum SCP of different cases of four-satellite constellation composed of three halo satellites and one DRO satellite.
6.2. Three halo satellites and two planar DRO satellites
For the five-satellite CN constellation, a complete survey of different cases is beyond our current computation ability and is not necessary. Inspired by the results shown in Figure 9, we know that the goal of the DRO is to compensate for the coverage of the equatorial region. By fixing the initial relative geometry of three halo satellites in Figure 9 unchanged, and by adjusting the relative geometry of the two DRO satellites, it is very easy for us to find a constellation that can continuously cover the whole lunar surface. One example is shown in Figure 17.
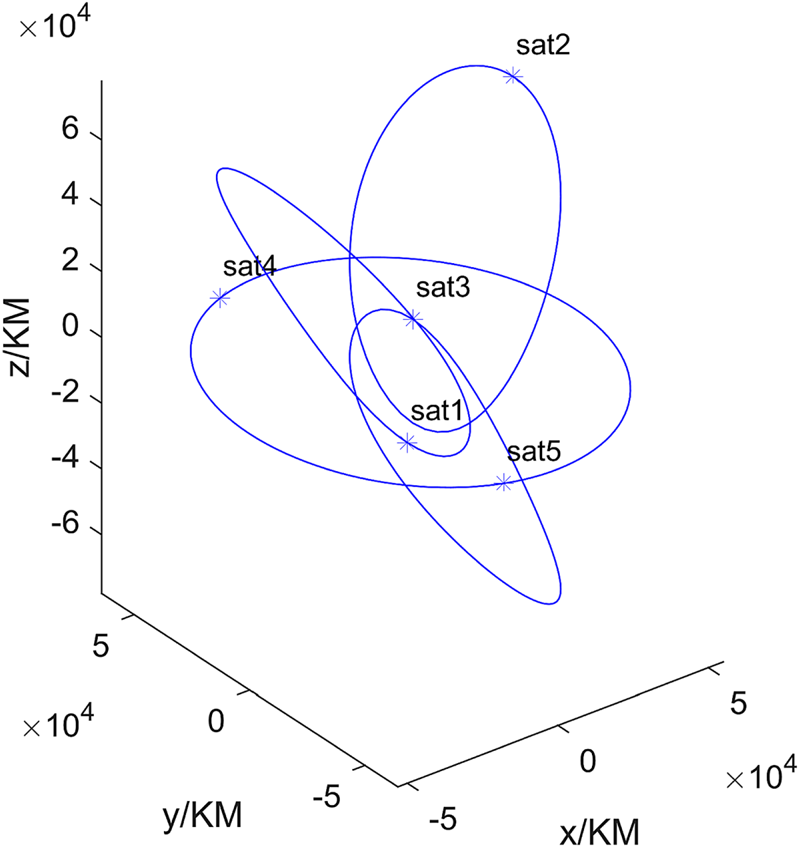
Figure 17. A final five-satellite hybrid constellation.
The period of this example constellation is 10 days. The initial phase of each satellite is τ1 = 0, τ2 = 0, τ3 = 0.5, τ4 = 0.2 and τ5 = 0.8. The ‘invisible’ region in Figure 9 is perfectly compensated by the two DRO satellites. When a finer grid interval 1° is used, the SCP is still 100%. One advantage of such a hybrid CN constellation is that it has a better observation geometry than the one that uses only the halo orbits or only the DROs.
As examples to confirm the coverage ability of our final constellation, we choose two positions on the lunar surface and calculate the visible satellites during one period (10 days). One is located at (0°, 80°), which is in the polar region. Another is located at (90°, − 40°), which is in the middle latitude region. A visibility analysis is performed and the results are shown in a stacked bar graph, as can be seen in Figure 18. Obviously, in both cases, at least one satellite is visible, i.e. the one-fold coverage is 100%. The two-fold coverage is not 100% but most of the time at least two satellites are visible.

Figure 18. Visibility analysis of two locations on the Moon's surface for the five-satellite hybrid constellation shown in Figure 17.
One remark is made here. The hybrid CN constellation in Figure 16 is given in the simple CRTBP model. It is periodic (in this case, the period is 10 days). As a result, if its SCP in one orbital period is 100%, then the SCP will always be 100%. Of course, a strict periodic CN constellation configuration is impossible in reality due to various perturbations. Nevertheless, we can expect quasi-periodic orbits close to these periodic orbits in reality so the SCP analysis of this hybrid constellation is a good approximation of the real case. Another remark is that the halo orbits in Figure 17 are unstable and require orbit control. How to control these orbits is beyond the scope of the current paper, but, according to previous studies, the station-keeping cost of such halo orbits is small – about 7·79 m/s annual cost according to Davis et al. (Reference Davis, Bhatt, Howell, Jang, Whitley, Clark, Guzzetti, Zimovan and Barton2017).
7. CONCLUSIONS
In this work, a systematic survey of the CN constellation composed of one to four satellites is performed. Besides halo orbits, the coverage ability of the DROs is also analysed in this study, which, as far as the authors know, is for the first time.
In Section 4, halo orbits are considered. The cases of one, two, three and four satellites on halo orbits are investigated. For the case of one satellite, halo orbits with large out-of-plane amplitude have good coverage of the north/south polar regions but poor coverage at the equatorial regions. For the case of two satellites on halo orbits, it is found that two satellites can cover 100% of the north or the south polar region, but never both. To cover both the north and the south polar regions, at least three satellites are needed. A three-satellite constellation example is described in detail. It is found that this constellation does cover both the north and the south polar regions continuously. Besides, it is found that the coverage gap is moving in the equatorial region from east to west. For the case of four satellites, it is found that four satellites on halo orbits can achieve nearly full coverage but not a perfect 100%.
In Section 5, coverage of the DROs is investigated. Planar DROs are studied first. Three satellites on a planar DRO are already able to continuously cover the whole lunar surface except for the polar caps. The SCP can exceed 99·8%. In order to also cover the polar caps, the spatial DROs are also considered. However, for the cases studied by us, a perfect 100% continuous coverage of the whole lunar surface cannot be achieved.
Finally, halo orbits and DROs are combined together to build up a hybrid constellation. Two cases are considered: (1) three satellites on halo orbits and one satellite on a DRO; and (2) three satellites on halo orbits and two satellites on a DRO. It is found that the maximum SCP that case 1 can provide is 99·8%. Therefore, at least five satellites are necessary for a perfect 100% lunar global coverage. Finally, a five-satellite hybrid constellation example that provides 100% global coverage is proposed.
Due to the cost of building a CN constellation around the Moon, as a first step, only one-fold coverage of the lunar surface by a limited number of satellites is considered in the current study. The CN constellations in this work are designed for this purpose. For the use of communication, the one-fold coverage can already be considered as real-time, as long as there are inter-satellite links between the CN satellites. However, in the case that the CN satellites visible to one point on the lunar surface have no inter-satellite links with other satellites, the communication of this point is limited. Since the CN satellites used in this study are generally at high altitude from the Moon, the possibility of losing all the links to other CN satellites is low. As for the use of navigation, of course, the current CN constellation is not real-time. However, it can still serve the purpose of navigation, just as the Transit satellite system did. For a low-altitude lunar probe, the visible satellite plays the role of a space-based observatory, and the orbit of the lunar probe can be determined by a time series of the links between the probe and the visible satellite. For a moving object on the lunar surface, its speed is relatively low compared with that of the satellite and its position can be approximately solved by a time series of the links between the object and the visible satellite.
The current work is carried out in the CRTBP and only periodic orbits are studied. In the near future, we are going to extend the research to a high-fidelity, ephemeris-based model and to quasi-periodic orbits. Moreover, this paper only focuses on one-fold coverage of the lunar surface. As already stated above, the satellite constellations designed in the above sections are for this purpose. However, for the purpose of general real-time positioning service on the lunar surface, such as the already existing Earth navigation constellations – GPS, GNSS, BDS and so on – at least four satellites are required to be simultaneously visible to one point on the lunar surface at any moment. This goal can be achieved by adding more satellites moving on halo orbits or DROs. Correspondingly, the four-fold coverage should be analysed. This will be the topic of our future studies.
ACKNOWLEDGEMENT
This work is supported by National Natural Science Foundation of China (NSFC 11773017, 11703013, 11673072).
SUPPLEMENTARY MATERIAL
The supplementary material for this article can be found at https://doi.org/10.1017/S0373463320000065.