



1. Introduction
In Antarctica, grounded ice goes afloat on the ocean to create a series of ice shelves. The characterisation and health of these ice shelves has received intense study because they can restrain the flow of grounded ice through buttressing (Paolo, Fricker & Padman Reference Paolo, Fricker and Padman2015; Fürst et al. Reference Fürst, Durand, Gillet-Chaulet, Tavard, Rankl, Braun and Gagliardini2016; Pegler Reference Pegler2018). The transition from ice being in contact with the bed to floating on water is called the grounding line. Grounding-line dynamics are closely tied to the stability and evolution of marine ice sheets (Schoof Reference Schoof2007a, Reference Schoof2012; Gudmundsson et al. Reference Gudmundsson, Krug, Durand, Favier and Gagliardini2012). For example, satellite data show that rapid grounding-line retreat is occurring at Pine Island Glacier and Thwaites Glacier in the Amundsen Sea region of West Antarctica, probably owing to sub-shelf melting and unstable bed geometry (Rignot et al. Reference Rignot, Mouginot, Morlighem, Seroussi and Scheuchl2014; Milillo et al. Reference Milillo, Rignot, Rizzoli, Scheuchl, Mouginot, Bueso-Bello and Prats-Iraola2019). While models predict that this rapid migration will result in accelerated mass loss in the future, the timing and magnitude of such change is uncertain (Favier et al. Reference Favier, Durand, Cornford, Gudmundsson, Gagliardini, Gillet- Chaulet, Zwinger, Payne and Le Brocq2014; Joughin, Smith & Medley Reference Joughin, Smith and Medley2014). Accurately modelling grounding-line response to climatic forcings is essential for forecasting land-ice contributions to sea-level rise.
Sea-level change causes grounding-line migration on both long and short time scales. Satellite altimetry shows that ocean tides cause diurnal cycles in ice-shelf surface elevation and flexure near the grounding line (Fricker & Padman Reference Fricker and Padman2006; Sykes, Murray & Luckman Reference Sykes, Murray and Luckman2009; Brunt et al. Reference Brunt, Fricker, Padman, Scambos and O'Neel2010). Variability in the inland limit of elevation change over time suggests that grounding-line positions are also sensitive to tidal cycles (Brunt, Fricker & Padman Reference Brunt, Fricker and Padman2011). Tidal flexure and grounding-line migration can cause variations in ice-flow speed by modulating stresses and friction at the base (Gudmundsson Reference Gudmundsson2007; Sergienko, MacAyeal & Bindschadler Reference Sergienko, MacAyeal and Bindschadler2009; Robel et al. Reference Robel, Tsai, Minchew and Simons2017; Rosier & Gudmundsson Reference Rosier and Gudmundsson2020).
A similar setting where grounding lines occur is on the shores of subglacial lakes. Numerous subglacial lakes have been identified beneath the Antarctic ice sheet through a variety of geophysical methods (Wright & Siegert Reference Wright and Siegert2012). When the water volume of a subglacial-lake changes, the ice surface above the lake responds accordingly. Anomalies in surface-elevation changes have been to used to detect over one hundred actively filling or draining subglacial lakes (Smith et al. Reference Smith, Fricker, Joughin and Tulaczyk2009). Observations of subglacial-lake filling and draining events provide information about the dynamics of the subglacial hydrological system (Fricker & Scambos Reference Fricker and Scambos2009; Smith et al. Reference Smith, Gourmelen, Huth and Joughin2017; Siegfried & Fricker Reference Siegfried and Fricker2018). Modelling the ice response to lake volume change requires consideration of grounding-line migration, but this has not been included in previous studies (Pattyn Reference Pattyn2008; Gudlaugsson et al. Reference Gudlaugsson, Humbert, Kleiner, Kohler and Andreassen2016).
Models for marine ice sheets based on approximations to the Stokes equations have been developed, analysed and supported by laboratory experiments (Weertman Reference Weertman1974; Muszynski & Birchfield Reference Muszynski and Birchfield1987; MacAyeal Reference MacAyeal1989; Schoof Reference Schoof2007a,Reference Schoofb; Robison, Huppert & Worster Reference Robison, Huppert and Worster2010; Schoof Reference Schoof2012; Pegler & Worster Reference Pegler and Worster2013; Pegler et al. Reference Pegler, Kowal, Hasenclever and Worster2013; Seroussi et al. Reference Seroussi, Morlighem, Larour, Rignot and Khazendar2014). More recently, the full Stokes equations have been used to simulate the dynamics of marine ice sheets (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a,Reference Durand, Gagliardini, Zwinger, Le Meur and Hindmarshb; Favier et al. Reference Favier, Gagliardini, Durand and Zwinger2012; Gudmundsson et al. Reference Gudmundsson, Krug, Durand, Favier and Gagliardini2012; Gagliardini et al. Reference Gagliardini, Brondex, Gillet-Chaulet, Tavard, Peyaud and DURAND2016; Cheng, Lötstedt & von Sydow Reference Cheng, Lötstedt and von Sydow2020). On tidal time scales, nonlinear viscoelastic models have been used (Rosier, Gudmundsson & Green Reference Rosier, Gudmundsson and Green2014; Rosier & Gudmundsson Reference Rosier and Gudmundsson2020). In these models, conditions on the normal stress and velocity at the lower boundary determine whether ice remains in contact with the bed or goes afloat. However, previous methods consider the contact conditions after discretisation rather than include them in the variational problem.
While the marine ice sheet and subglacial-lake problems are similar, there are two important differences. The first difference is that subglacial lakes have finite volume, whereas the ocean volume is unbounded relative to the sub-shelf cavity volume. The second difference is that the normal-stress boundary condition at the ice–water interface can be well approximated a priori in the marine ice-sheet problem because sub-shelf water is connected to the sea surface. In contrast to previous studies, we do not assume that the subglacial-lake water pressure equals the cryostatic pressure (Pattyn Reference Pattyn2008; Gudlaugsson et al. Reference Gudlaugsson, Humbert, Kleiner, Kohler and Andreassen2016). Instead, we show later that the mean water pressure is part of the solution to the problem and is constrained by water volume conservation.
In this paper, we derive and test numerical methods for grounding-line dynamics in the marine ice sheet and subglacial-lake settings. In contrast to previous studies, we incorporate the contact conditions directly into the variational formulations of the problems. After describing the domain and governing equations (§§ 2.1 and 2.2), we derive expressions for water pressure (§ 2.3) and discuss the boundary conditions (§ 2.4). Following a standard approach in contact mechanics, we show that the problems may be cast as variational inequalities posed over a set of admissible velocity fields (§ 3.1). We introduce minimisation formulations of the problems to establish well-posedness and justify the penalty method (§ 3.2). We then derive the penalty formulations (§ 3.3) that are solved numerically with a finite-element method (§ 3.4). To illustrate the numerical method, we provide examples of grounding-line response to tidal cycles in the marine ice-sheet problem (§ 4.1) and filling–draining cycles in the subglacial-lake problem (§ 4.2).
2. Model description
2.1. Domain
We consider a body of water beneath an ice sheet in the plane. We denote the spatial coordinate by  $\boldsymbol {x}=(x,z)$. We assume the lower boundary of the ice is described by a function
$\boldsymbol {x}=(x,z)$. We assume the lower boundary of the ice is described by a function  $s(x,t)$ that is bounded below by the bed,
$s(x,t)$ that is bounded below by the bed,  $\beta (x)$. We define
$\beta (x)$. We define  $h(x,t)$ to be the surface elevation of the ice sheet. The ice-filled domain is defined by
$h(x,t)$ to be the surface elevation of the ice sheet. The ice-filled domain is defined by
 \begin{equation} \varOmega = \left\{(x,z):\; |x| < L/2,\ s(x,t)< z < h(x,t)\right\}, \end{equation}
\begin{equation} \varOmega = \left\{(x,z):\; |x| < L/2,\ s(x,t)< z < h(x,t)\right\}, \end{equation}
for a constant length  $L$. As we are mainly concerned with modelling ice flow near the grounding lines, the length
$L$. As we are mainly concerned with modelling ice flow near the grounding lines, the length  $L$ is arbitrary but much smaller than the length of the ice sheet. We let
$L$ is arbitrary but much smaller than the length of the ice sheet. We let  $\varGamma _w$ and
$\varGamma _w$ and  $\varGamma _b$ be the ice–water and ice–bed surfaces, respectively. These boundaries are defined by
$\varGamma _b$ be the ice–water and ice–bed surfaces, respectively. These boundaries are defined by
 \begin{gather} \varGamma_w = \{(x,z)\in\partial\varOmega: \ z=s(x,t)>\beta(x) \}, \end{gather}
\begin{gather} \varGamma_w = \{(x,z)\in\partial\varOmega: \ z=s(x,t)>\beta(x) \}, \end{gather} \begin{gather}\varGamma_b = \{(x,z)\in\partial\varOmega: \ z=s(x,t)=\beta(x) \}, \end{gather}
\begin{gather}\varGamma_b = \{(x,z)\in\partial\varOmega: \ z=s(x,t)=\beta(x) \}, \end{gather} \begin{gather}\varGamma_s = \varGamma_w\cup\varGamma_b, \end{gather}
\begin{gather}\varGamma_s = \varGamma_w\cup\varGamma_b, \end{gather}
where  $\varGamma _s$ denotes the entirety of the lower boundary. Grounding lines exist where the ice–water and ice–bed boundaries meet. We let the minimum and maximum grounding-line positions be
$\varGamma _s$ denotes the entirety of the lower boundary. Grounding lines exist where the ice–water and ice–bed boundaries meet. We let the minimum and maximum grounding-line positions be  $x_-(t)$ and
$x_-(t)$ and  $x_+(t)$, respectively. We use
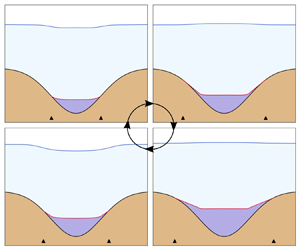
$x_+(t)$, respectively. We use  $x_\pm$ to collectively refer to both grounding lines. We assume that the subglacial-lake water is not connected to the surface, although this is not true for all glacial lakes. The model geometry for both settings is illustrated in figure 1.
$x_\pm$ to collectively refer to both grounding lines. We assume that the subglacial-lake water is not connected to the surface, although this is not true for all glacial lakes. The model geometry for both settings is illustrated in figure 1.



2.2. Ice flow
Here, we outline the ice-flow component of the model. We let  $\boldsymbol {u}$ be the ice velocity,
$\boldsymbol {u}$ be the ice velocity,  $p$ the ice pressure,
$p$ the ice pressure,  $\rho _i$ the ice density and
$\rho _i$ the ice density and  $\eta$ the ice viscosity. We denote the horizontal and vertical components of a vector
$\eta$ the ice viscosity. We denote the horizontal and vertical components of a vector  $\boldsymbol {v}$ by
$\boldsymbol {v}$ by  $v_x$ and
$v_x$ and  $v_z$, respectively. We assume that ice deforms as an incompressible viscous fluid subject to the Stokes equations
$v_z$, respectively. We assume that ice deforms as an incompressible viscous fluid subject to the Stokes equations
 \begin{gather} -\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{\sigma}(\boldsymbol{u},p) = \rho_i\boldsymbol{g}, \end{gather}
\begin{gather} -\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{\sigma}(\boldsymbol{u},p) = \rho_i\boldsymbol{g}, \end{gather} \begin{gather}\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{u} = 0, \end{gather}
\begin{gather}\boldsymbol{\nabla} \boldsymbol{\cdot} \boldsymbol{u} = 0, \end{gather}
where  $\boldsymbol {g}=g[0,-1]^{\mathrm {T}}$ is gravitational acceleration with magnitude
$\boldsymbol {g}=g[0,-1]^{\mathrm {T}}$ is gravitational acceleration with magnitude  $g$. Momentum conservation and incompressibility are ensured through (2.5) and (2.6), respectively. The stress is related to pressure and velocity through
$g$. Momentum conservation and incompressibility are ensured through (2.5) and (2.6), respectively. The stress is related to pressure and velocity through
 \begin{equation} \boldsymbol{\sigma}(\boldsymbol{u},p)={-}p\boldsymbol{\mathsf{I}} + 2\eta(\boldsymbol{u}) \boldsymbol{\mathsf{D}}(\boldsymbol{u}), \end{equation}
\begin{equation} \boldsymbol{\sigma}(\boldsymbol{u},p)={-}p\boldsymbol{\mathsf{I}} + 2\eta(\boldsymbol{u}) \boldsymbol{\mathsf{D}}(\boldsymbol{u}), \end{equation}where
 \begin{equation} \boldsymbol{\mathsf{D}}(\boldsymbol{u}) = \tfrac{1}{2}\left[\boldsymbol{\nabla} \boldsymbol{u} + (\boldsymbol{\nabla} \boldsymbol{u})^{\mathrm{T}} \right] \end{equation}
\begin{equation} \boldsymbol{\mathsf{D}}(\boldsymbol{u}) = \tfrac{1}{2}\left[\boldsymbol{\nabla} \boldsymbol{u} + (\boldsymbol{\nabla} \boldsymbol{u})^{\mathrm{T}} \right] \end{equation}
is the strain rate and  $\boldsymbol{\mathsf{I}}$ is the identity matrix. Throughout, we use the Frobenius norm
$\boldsymbol{\mathsf{I}}$ is the identity matrix. Throughout, we use the Frobenius norm  $|\boldsymbol{\mathsf{D}}| = \sqrt {\boldsymbol{\mathsf{D}}\boldsymbol {:}\boldsymbol{\mathsf{D}}}$ for tensors. Defining
$|\boldsymbol{\mathsf{D}}| = \sqrt {\boldsymbol{\mathsf{D}}\boldsymbol {:}\boldsymbol{\mathsf{D}}}$ for tensors. Defining  $n\geqslant 1$ to be the stress exponent and
$n\geqslant 1$ to be the stress exponent and  $A>0$ the ice softness, we use Glen's law to relate the viscosity to the strain rate through the equation
$A>0$ the ice softness, we use Glen's law to relate the viscosity to the strain rate through the equation
 \begin{equation} \eta(\boldsymbol{u}) = \tfrac{1}{2}B(|\boldsymbol{\mathsf{D}}(\boldsymbol{u})|^2 + \delta)^{({r-2})/{2}}, \end{equation}
\begin{equation} \eta(\boldsymbol{u}) = \tfrac{1}{2}B(|\boldsymbol{\mathsf{D}}(\boldsymbol{u})|^2 + \delta)^{({r-2})/{2}}, \end{equation}
where  $r=1+1/n$ and
$r=1+1/n$ and  $B=2^{({n-1})/{2n}}A^{-{1}/{n}}$ are flow law parameters (Glen Reference Glen1955; Cuffey & Paterson Reference Cuffey and Paterson2010). The parameter
$B=2^{({n-1})/{2n}}A^{-{1}/{n}}$ are flow law parameters (Glen Reference Glen1955; Cuffey & Paterson Reference Cuffey and Paterson2010). The parameter  $\delta \ll 1$ is used to prevent infinite viscosity at zero strain rate in numerical simulations (Jouvet & Rappaz Reference Jouvet and Rappaz2011; Helanow & Ahlkrona Reference Helanow and Ahlkrona2018). While ice has a viscoelastic rheology on the tidal time scales explored in § 4.1, we consider the purely viscous rheology here to illustrate the numerical method and provide a point of comparison for studies that include elasticity.
$\delta \ll 1$ is used to prevent infinite viscosity at zero strain rate in numerical simulations (Jouvet & Rappaz Reference Jouvet and Rappaz2011; Helanow & Ahlkrona Reference Helanow and Ahlkrona2018). While ice has a viscoelastic rheology on the tidal time scales explored in § 4.1, we consider the purely viscous rheology here to illustrate the numerical method and provide a point of comparison for studies that include elasticity.
The evolution of the upper and lower surfaces are governed by the kinematic equations
 \begin{gather} \frac{\partial h}{\partial t}(x,t) = \sqrt{1+\left(\frac{\partial h}{\partial x}\right)^2}\, u_n(x,h,t), \end{gather}
\begin{gather} \frac{\partial h}{\partial t}(x,t) = \sqrt{1+\left(\frac{\partial h}{\partial x}\right)^2}\, u_n(x,h,t), \end{gather} \begin{gather}\frac{\partial s}{\partial t}(x,t) ={-}\sqrt{1+\left(\frac{\partial s}{\partial x}\right)^2} \, u_n(x,s,t), \end{gather}
\begin{gather}\frac{\partial s}{\partial t}(x,t) ={-}\sqrt{1+\left(\frac{\partial s}{\partial x}\right)^2} \, u_n(x,s,t), \end{gather}where
 \begin{equation} u_n = \boldsymbol{u}\boldsymbol{\cdot}\boldsymbol{n}|_{\partial\varOmega} \end{equation}
\begin{equation} u_n = \boldsymbol{u}\boldsymbol{\cdot}\boldsymbol{n}|_{\partial\varOmega} \end{equation}
is the normal component of the velocity on the boundary and  $\boldsymbol {n}$ is the outward-pointing unit normal to the boundary (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a; Schoof Reference Schoof2011). We neglect mass change at the surface (e.g. accumulation or ablation) and bed (e.g. melting or freezing) in (2.10) and (2.11), respectively, in order to focus on the mechanical contact problems.
$\boldsymbol {n}$ is the outward-pointing unit normal to the boundary (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a; Schoof Reference Schoof2011). We neglect mass change at the surface (e.g. accumulation or ablation) and bed (e.g. melting or freezing) in (2.10) and (2.11), respectively, in order to focus on the mechanical contact problems.
2.3. Water pressure and volume change
We assume that both the ocean and subglacial lake are hydrostatic. We let  $p_w$ be the water pressure at the ice–water interface, with
$p_w$ be the water pressure at the ice–water interface, with  $p_w^{o}$ and
$p_w^{o}$ and  $p_w^{l}$ denoting the particular expressions for the ocean and subglacial lake, respectively. For marine ice sheets, the hydrostatic water pressure is
$p_w^{l}$ denoting the particular expressions for the ocean and subglacial lake, respectively. For marine ice sheets, the hydrostatic water pressure is  $p_w^o = \rho _w g (\ell -s)$, where
$p_w^o = \rho _w g (\ell -s)$, where  $\ell$ is sea level. However, using the elevation
$\ell$ is sea level. However, using the elevation  $s$ computed from the velocity solution at the previous time step is numerically unstable (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a). We approximate
$s$ computed from the velocity solution at the previous time step is numerically unstable (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a). We approximate  $s$ at the current time step by applying the backward Euler method to (2.11) under the assumption of small gradients,
$s$ at the current time step by applying the backward Euler method to (2.11) under the assumption of small gradients,  $({\partial s}/{\partial x})^2\ll 1$, to yield
$({\partial s}/{\partial x})^2\ll 1$, to yield
 \begin{equation} s_*(x,t) = s(x,t-\Delta t) - (\Delta t) u_n (x,s,t), \end{equation}
\begin{equation} s_*(x,t) = s(x,t-\Delta t) - (\Delta t) u_n (x,s,t), \end{equation}
where  $\Delta t$ is the time-step size. Using the approximation
$\Delta t$ is the time-step size. Using the approximation  $s_*$, the sub-shelf water pressure becomes
$s_*$, the sub-shelf water pressure becomes
 \begin{equation} p_{w}^o(x,s,t) = \rho_w g (\ell(t)-s_*(x,t)) . \end{equation}
\begin{equation} p_{w}^o(x,s,t) = \rho_w g (\ell(t)-s_*(x,t)) . \end{equation} Subglacial lakes have finite volume that can change considerably over time. The subglacial-lake volume  $\mathcal {V}$ evolves according to
$\mathcal {V}$ evolves according to
 \begin{equation} \dot{\mathcal{V}}(t) ={-}\int_{\varGamma_s}u_n\,\mathrm{d}\boldsymbol{s}. \end{equation}
\begin{equation} \dot{\mathcal{V}}(t) ={-}\int_{\varGamma_s}u_n\,\mathrm{d}\boldsymbol{s}. \end{equation}For a prescribed volume change rate, equation (2.15) acts as an integral constraint on the normal component of the velocity at the base. In contrast, the marine ice-sheet problem does not have a constraint such as (2.15) because the ocean volume is larger than the sub-shelf cavity volume. In the marine case, the water volume change is instead controlled by the ice-flow response to water pressure variations, analogous to models of subglacial cavitation (Schoof Reference Schoof2005; Gagliardini et al. Reference Gagliardini, Cohen, Råback and Zwinger2007).
We assume that subglacial-lake water is not connected to the surface, so there is no datum where water pressure is known a priori. Assuming hydrostatic balance ( $\boldsymbol {\nabla } p_w = \rho _w \boldsymbol {g}$), the expression for water pressure is only determined up to a constant. Therefore, we choose to express the subglacial-lake water pressure as
$\boldsymbol {\nabla } p_w = \rho _w \boldsymbol {g}$), the expression for water pressure is only determined up to a constant. Therefore, we choose to express the subglacial-lake water pressure as  $p_w^{l} = \rho _wg (\bar {s}-s) + \bar {p}_w,$ where
$p_w^{l} = \rho _wg (\bar {s}-s) + \bar {p}_w,$ where  $\bar {s}$ and
$\bar {s}$ and  $\bar {p}_w$ are the means of
$\bar {p}_w$ are the means of  $s$ and
$s$ and  $p_w^{l}$ over
$p_w^{l}$ over  $(x_-,x_+)$. Although we expect that the water pressure is near the cryostatic pressure as assumed in previous models, determining
$(x_-,x_+)$. Although we expect that the water pressure is near the cryostatic pressure as assumed in previous models, determining  $\bar {p}_w$ is part of the solution to the problem (Pattyn Reference Pattyn2008; Gudlaugsson et al. Reference Gudlaugsson, Humbert, Kleiner, Kohler and Andreassen2016). In the following, we show that approximating
$\bar {p}_w$ is part of the solution to the problem (Pattyn Reference Pattyn2008; Gudlaugsson et al. Reference Gudlaugsson, Humbert, Kleiner, Kohler and Andreassen2016). In the following, we show that approximating  $\bar {p}_w$ by the mean cryostatic pressure is accurate within a few kilopascals. However, the utility of leaving
$\bar {p}_w$ by the mean cryostatic pressure is accurate within a few kilopascals. However, the utility of leaving  $\bar {p}_w$ undetermined is that it acts as a Lagrange multiplier that enforces the volume-change constraint (§ 3.1).
$\bar {p}_w$ undetermined is that it acts as a Lagrange multiplier that enforces the volume-change constraint (§ 3.1).
We also require a numerically stable approximation of the subglacial-lake water pressure. We may replace  $\varGamma _s$ with
$\varGamma _s$ with  $\varGamma _w$ in (2.15) by applying Leibniz's rule to
$\varGamma _w$ in (2.15) by applying Leibniz's rule to  $\mathcal {V}=\int _{x_-}^{x_+}s-b\,\mathrm {d} x$ if
$\mathcal {V}=\int _{x_-}^{x_+}s-b\,\mathrm {d} x$ if  $x_-(t)$ and
$x_-(t)$ and  $x_+(t)$ are continuously differentiable. Although this smoothness assumption may not hold in general, we use it as an approximation in the stabilising scheme. Taking the mean of (2.13), we approximate
$x_+(t)$ are continuously differentiable. Although this smoothness assumption may not hold in general, we use it as an approximation in the stabilising scheme. Taking the mean of (2.13), we approximate  $\bar {s}(t)$ at the current time step by
$\bar {s}(t)$ at the current time step by
 \begin{equation} \bar{s}_*(t) = \bar{s}(t-\Delta t) + (\Delta t) \dot{\mathcal{V}}/|\varGamma_w|, \end{equation}
\begin{equation} \bar{s}_*(t) = \bar{s}(t-\Delta t) + (\Delta t) \dot{\mathcal{V}}/|\varGamma_w|, \end{equation}
where we have assumed  $-\int _{\varGamma _w} u_n\,\mathrm {d}\boldsymbol {s}\approx \dot {\mathcal {V}}$ and denoted the measure of
$-\int _{\varGamma _w} u_n\,\mathrm {d}\boldsymbol {s}\approx \dot {\mathcal {V}}$ and denoted the measure of  $\varGamma _w$ by
$\varGamma _w$ by  $|\varGamma _w|$. Using the approximations (2.13) and (2.16), we arrive at the expression for subglacial-lake water pressure
$|\varGamma _w|$. Using the approximations (2.13) and (2.16), we arrive at the expression for subglacial-lake water pressure
 \begin{equation} p_{w}^l(x,s,t) = \rho_wg (\bar{s}_*(t)-s_*(x,t)) + \bar{p}_w(t) . \end{equation}
\begin{equation} p_{w}^l(x,s,t) = \rho_wg (\bar{s}_*(t)-s_*(x,t)) + \bar{p}_w(t) . \end{equation}We omit time arguments for brevity.
2.4. Boundary conditions
Stress continuity at the ice–water boundary implies
 \begin{equation} \boldsymbol{\sigma} \boldsymbol{n} ={-}p_w\boldsymbol{n} \quad \mathrm{on}\ \varGamma_w, \end{equation}
\begin{equation} \boldsymbol{\sigma} \boldsymbol{n} ={-}p_w\boldsymbol{n} \quad \mathrm{on}\ \varGamma_w, \end{equation}
where  $p_w$ is given by either (2.14) or (2.17), depending on the setting. Equation (2.18) implies that the shear stress vanishes on the ice–water boundary. We assume a stress-free condition at the ice–air interface, which requires that
$p_w$ is given by either (2.14) or (2.17), depending on the setting. Equation (2.18) implies that the shear stress vanishes on the ice–water boundary. We assume a stress-free condition at the ice–air interface, which requires that
 \begin{equation} \boldsymbol{\sigma} \boldsymbol{n} = \boldsymbol{0} \quad \mathrm{on}\ z=h(x,t). \end{equation}
\begin{equation} \boldsymbol{\sigma} \boldsymbol{n} = \boldsymbol{0} \quad \mathrm{on}\ z=h(x,t). \end{equation}On the inflow and outflow boundaries, we consider two types of boundary conditions (figure 1). First, we prescribe a uniform horizontal velocity and zero vertical shear stress
 \begin{equation} \left. \begin{array}{l@{}} u_x = u_0 \\ \boldsymbol{\mathsf{T}}\boldsymbol{\sigma} \boldsymbol{n} = \boldsymbol{0} \end{array} \right\} \quad \mathrm{on}\ \varGamma_{D}, \end{equation}
\begin{equation} \left. \begin{array}{l@{}} u_x = u_0 \\ \boldsymbol{\mathsf{T}}\boldsymbol{\sigma} \boldsymbol{n} = \boldsymbol{0} \end{array} \right\} \quad \mathrm{on}\ \varGamma_{D}, \end{equation}
where  $u_0\geqslant 0$ is the horizontal flow speed and
$u_0\geqslant 0$ is the horizontal flow speed and  $\boldsymbol{\mathsf{T}}= \boldsymbol{\mathsf{I}}-\boldsymbol {n} \boldsymbol {n}^{\mathrm {T}}$ is an orthogonal projection on to the boundary. Here
$\boldsymbol{\mathsf{T}}= \boldsymbol{\mathsf{I}}-\boldsymbol {n} \boldsymbol {n}^{\mathrm {T}}$ is an orthogonal projection on to the boundary. Here  $\varGamma _D$ coincides with the inflow boundary in the case
$\varGamma _D$ coincides with the inflow boundary in the case  $u_0 > 0$ (marine case), or both the inflow and outflow boundaries when
$u_0 > 0$ (marine case), or both the inflow and outflow boundaries when  $u_0=0$ (subglacial-lake case). In the marine case (
$u_0=0$ (subglacial-lake case). In the marine case ( $u_0> 0$), we assume a cryostatic normal-stress condition of the form
$u_0> 0$), we assume a cryostatic normal-stress condition of the form
 \begin{equation} \boldsymbol{\sigma} \boldsymbol{n} ={-}\rho_i g (h-z)\boldsymbol{n} \quad \mathrm{on}\ \varGamma_{N}, \end{equation}
\begin{equation} \boldsymbol{\sigma} \boldsymbol{n} ={-}\rho_i g (h-z)\boldsymbol{n} \quad \mathrm{on}\ \varGamma_{N}, \end{equation}
where  $\varGamma _N$ coincides with the outflow boundary. These inflow and outflow conditions are noted in figure 1.
$\varGamma _N$ coincides with the outflow boundary. These inflow and outflow conditions are noted in figure 1.
In the marine case, equating the normal stresses
 \begin{equation} {\sigma}_n ={-}\boldsymbol{n}\boldsymbol{\cdot}\boldsymbol{\sigma}\boldsymbol{n}|_{\partial\varOmega} \end{equation}
\begin{equation} {\sigma}_n ={-}\boldsymbol{n}\boldsymbol{\cdot}\boldsymbol{\sigma}\boldsymbol{n}|_{\partial\varOmega} \end{equation}
associated with (2.18) and (2.21), where  $\varGamma _N$ and
$\varGamma _N$ and  $\varGamma _w$ meet (see figure 1a) leads to the flotation condition
$\varGamma _w$ meet (see figure 1a) leads to the flotation condition
 \begin{equation} h= s+\frac{\rho_w}{\rho_i}(\ell-s) \quad ({\equiv} h_f) \end{equation}
\begin{equation} h= s+\frac{\rho_w}{\rho_i}(\ell-s) \quad ({\equiv} h_f) \end{equation}
in the limit  $\Delta t\to 0$ (
$\Delta t\to 0$ ( $s_*\to s$). We confirm in what follows that the ice-surface elevation near the outflow boundary remains close to
$s_*\to s$). We confirm in what follows that the ice-surface elevation near the outflow boundary remains close to  $h_f$ (§ 4.1).
$h_f$ (§ 4.1).
On the ice–bed boundary, we assume a sliding law of the form
 \begin{equation} \boldsymbol{\mathsf{T}}\boldsymbol{\sigma}\boldsymbol{n}+ \alpha (\boldsymbol{u}) \boldsymbol{\mathsf{T}}\boldsymbol{u} = \boldsymbol{0} \quad \mathrm{on}\ \varGamma_b \end{equation}
\begin{equation} \boldsymbol{\mathsf{T}}\boldsymbol{\sigma}\boldsymbol{n}+ \alpha (\boldsymbol{u}) \boldsymbol{\mathsf{T}}\boldsymbol{u} = \boldsymbol{0} \quad \mathrm{on}\ \varGamma_b \end{equation}
with friction  $\alpha$ given by
$\alpha$ given by
 \begin{equation} \alpha(\boldsymbol{u}) = C(|\boldsymbol{\mathsf{T}}\boldsymbol{u}|^2 + \delta)^{({r-2})/{2}}, \end{equation}
\begin{equation} \alpha(\boldsymbol{u}) = C(|\boldsymbol{\mathsf{T}}\boldsymbol{u}|^2 + \delta)^{({r-2})/{2}}, \end{equation}
where  $C> 0$ is the friction coefficient and
$C> 0$ is the friction coefficient and  $|\boldsymbol {a}|$ denotes the Euclidean norm of a vector
$|\boldsymbol {a}|$ denotes the Euclidean norm of a vector  $\boldsymbol {a}$ (Weertman Reference Weertman1957; Kamb Reference Kamb1970). In the friction law (2.25), we assume the same value of regularisation parameter
$\boldsymbol {a}$ (Weertman Reference Weertman1957; Kamb Reference Kamb1970). In the friction law (2.25), we assume the same value of regularisation parameter  $\delta$ as in the flow law (2.9).
$\delta$ as in the flow law (2.9).
There are three possibilities for the normal stress  ${\sigma }_n$ and normal component of the velocity
${\sigma }_n$ and normal component of the velocity  $u_n$ at the ice–bed boundary. The first possibility is that the normal stress exceeds the water pressure (
$u_n$ at the ice–bed boundary. The first possibility is that the normal stress exceeds the water pressure ( $\sigma _n >p_w$) and the ice is not lifted off of the bed (
$\sigma _n >p_w$) and the ice is not lifted off of the bed ( $u_n=0$). The second possibility is that the ice is lifted from the bed (
$u_n=0$). The second possibility is that the ice is lifted from the bed ( $u_n<0$) and the normal stress equals the water pressure (
$u_n<0$) and the normal stress equals the water pressure ( $\sigma _n=p_w$) (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a; Schoof Reference Schoof2011). The third possibility is that the normal stress reaches the water pressure (
$\sigma _n=p_w$) (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a; Schoof Reference Schoof2011). The third possibility is that the normal stress reaches the water pressure ( $\sigma _n=p_w$), but the ice is not lifted from the bed (
$\sigma _n=p_w$), but the ice is not lifted from the bed ( $u_n=0$). These three cases are represented by either
$u_n=0$). These three cases are represented by either
 \begin{equation} \left. \begin{array}{c@{}} {\sigma}_n \geqslant p_w \\ u_n = 0 \end{array}\right\} \quad \mathrm{or} \quad \left. \begin{array}{c@{}} {\sigma}_n = p_w \\ u_n \leqslant 0 \end{array}\right\} \quad \mathrm{on} \ \varGamma_b. \end{equation}
\begin{equation} \left. \begin{array}{c@{}} {\sigma}_n \geqslant p_w \\ u_n = 0 \end{array}\right\} \quad \mathrm{or} \quad \left. \begin{array}{c@{}} {\sigma}_n = p_w \\ u_n \leqslant 0 \end{array}\right\} \quad \mathrm{on} \ \varGamma_b. \end{equation}The two sets of conditions in (2.26) are equivalent to
 \begin{equation} \left. \begin{array}{c@{}} {\sigma}_n \geqslant p_w \\ u_n \leqslant 0 \\ ({\sigma}_n - p_w)u_n = 0 \end{array}\right\} \quad \mathrm{on}\ \varGamma_b. \end{equation}
\begin{equation} \left. \begin{array}{c@{}} {\sigma}_n \geqslant p_w \\ u_n \leqslant 0 \\ ({\sigma}_n - p_w)u_n = 0 \end{array}\right\} \quad \mathrm{on}\ \varGamma_b. \end{equation}
The contact conditions (2.27) are analogous to those in the Signorini problem from elasticity (Kikuchi & Oden Reference Kikuchi and Oden1988). We refer to the condition  $u_n \leqslant 0$ as bed impenetrability.
$u_n \leqslant 0$ as bed impenetrability.
3. Weak formulations
3.1. Derivation of mixed formulations
We now derive weak formulations of the models. We let  $V$ and
$V$ and  $Q$ be appropriate function spaces for the velocity and pressure, respectively (Appendix A.1). We define the set of admissible velocity fields by
$Q$ be appropriate function spaces for the velocity and pressure, respectively (Appendix A.1). We define the set of admissible velocity fields by
 \begin{equation} {K} = \{\boldsymbol{v}\in V: \ v_n|_{\varGamma_b} \leqslant 0 \ \mathrm{and}\ v_x|_{\varGamma_{D}} = u_0 \}, \end{equation}
\begin{equation} {K} = \{\boldsymbol{v}\in V: \ v_n|_{\varGamma_b} \leqslant 0 \ \mathrm{and}\ v_x|_{\varGamma_{D}} = u_0 \}, \end{equation}
which is a closed, convex subset of  $V$. We let
$V$. We let  $\boldsymbol {v}\in K$ be an arbitrary test function, multiply (2.5) by
$\boldsymbol {v}\in K$ be an arbitrary test function, multiply (2.5) by  $\boldsymbol {v}-\boldsymbol {u}$ and integrate by parts to obtain
$\boldsymbol {v}-\boldsymbol {u}$ and integrate by parts to obtain
 \begin{equation} \int_{\varOmega}2\eta(\boldsymbol{u})\boldsymbol{\mathsf{D}}(\boldsymbol{u})\boldsymbol{:} \boldsymbol{\mathsf{D}}(\boldsymbol{v}-\boldsymbol{u}) - \rho_i\boldsymbol{g}\boldsymbol{\cdot}(\boldsymbol{v}-\boldsymbol{u}) -p\boldsymbol{\nabla}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{x} - \int_{\partial \varOmega} \boldsymbol{\sigma} \boldsymbol{n}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s}=0, \end{equation}
\begin{equation} \int_{\varOmega}2\eta(\boldsymbol{u})\boldsymbol{\mathsf{D}}(\boldsymbol{u})\boldsymbol{:} \boldsymbol{\mathsf{D}}(\boldsymbol{v}-\boldsymbol{u}) - \rho_i\boldsymbol{g}\boldsymbol{\cdot}(\boldsymbol{v}-\boldsymbol{u}) -p\boldsymbol{\nabla}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{x} - \int_{\partial \varOmega} \boldsymbol{\sigma} \boldsymbol{n}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s}=0, \end{equation}
where we used the identity  $\boldsymbol{\mathsf{D}}(\boldsymbol {u})\boldsymbol {:}\boldsymbol {\nabla }(\boldsymbol {v}-\boldsymbol {u}) =\boldsymbol{\mathsf{D}}(\boldsymbol {u})\boldsymbol {:}\boldsymbol{\mathsf{D}}(\boldsymbol {v}-\boldsymbol {u})$.
$\boldsymbol{\mathsf{D}}(\boldsymbol {u})\boldsymbol {:}\boldsymbol {\nabla }(\boldsymbol {v}-\boldsymbol {u}) =\boldsymbol{\mathsf{D}}(\boldsymbol {u})\boldsymbol {:}\boldsymbol{\mathsf{D}}(\boldsymbol {v}-\boldsymbol {u})$.
We turn our attention to the boundary integral over  $\varGamma _b$. Using
$\varGamma _b$. Using  $\boldsymbol {\sigma } \boldsymbol {n} = \boldsymbol{\mathsf{T}}\boldsymbol {\sigma }\boldsymbol {n} - {\sigma }_n \boldsymbol {n}$, the sliding law (2.24) and the identity
$\boldsymbol {\sigma } \boldsymbol {n} = \boldsymbol{\mathsf{T}}\boldsymbol {\sigma }\boldsymbol {n} - {\sigma }_n \boldsymbol {n}$, the sliding law (2.24) and the identity  $\boldsymbol{\mathsf{T}}\boldsymbol {u}\boldsymbol {\cdot } (\boldsymbol {v}-\boldsymbol {u})=\boldsymbol{\mathsf{T}}\boldsymbol {u}\boldsymbol {\cdot } \boldsymbol{\mathsf{T}}(\boldsymbol {v}-\boldsymbol {u})$ (since
$\boldsymbol{\mathsf{T}}\boldsymbol {u}\boldsymbol {\cdot } (\boldsymbol {v}-\boldsymbol {u})=\boldsymbol{\mathsf{T}}\boldsymbol {u}\boldsymbol {\cdot } \boldsymbol{\mathsf{T}}(\boldsymbol {v}-\boldsymbol {u})$ (since  $\boldsymbol{\mathsf{T}}$ is an orthogonal projection), we obtain
$\boldsymbol{\mathsf{T}}$ is an orthogonal projection), we obtain
 \begin{equation} - \int_{\varGamma_b} \boldsymbol{\sigma} \boldsymbol{n}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s} = \int_{\varGamma_b} \alpha(\boldsymbol{u})\boldsymbol{\mathsf{T}}\boldsymbol{u}\boldsymbol{\cdot} \boldsymbol{\mathsf{T}}(\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s} + \int_{\varGamma_b} {\sigma}_n(v_n-u_n) \, \mathrm{d}\boldsymbol{s}. \end{equation}
\begin{equation} - \int_{\varGamma_b} \boldsymbol{\sigma} \boldsymbol{n}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s} = \int_{\varGamma_b} \alpha(\boldsymbol{u})\boldsymbol{\mathsf{T}}\boldsymbol{u}\boldsymbol{\cdot} \boldsymbol{\mathsf{T}}(\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s} + \int_{\varGamma_b} {\sigma}_n(v_n-u_n) \, \mathrm{d}\boldsymbol{s}. \end{equation}
The contact conditions (2.27) and  $v_n|_{\varGamma _b}\leqslant 0$ imply that
$v_n|_{\varGamma _b}\leqslant 0$ imply that
 \begin{equation} \int_{\varGamma_b} {\sigma}_n(v_n-u_n) \, \mathrm{d}\boldsymbol{s} \leqslant \int_{\varGamma_b} p_w(v_n-u_n) \,\mathrm{d}\boldsymbol{s}. \end{equation}
\begin{equation} \int_{\varGamma_b} {\sigma}_n(v_n-u_n) \, \mathrm{d}\boldsymbol{s} \leqslant \int_{\varGamma_b} p_w(v_n-u_n) \,\mathrm{d}\boldsymbol{s}. \end{equation}Combining inequality (3.4) with (3.2)–(3.3) and the boundary conditions (2.18)–(2.21), we obtain the variational inequality
 \begin{align} &\int_{\varOmega} \left[ 2\eta(\boldsymbol{u})\boldsymbol{\mathsf{D}}(\boldsymbol{u})\boldsymbol{:}\boldsymbol{\mathsf{D}}(\boldsymbol{v}-\boldsymbol{u}) - \rho_i\boldsymbol{g}\boldsymbol{\cdot}(\boldsymbol{v}-\boldsymbol{u}) -p\boldsymbol{\nabla}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u})\right] \mathrm{d}\boldsymbol{x} + \int_{\varGamma_s} p_w (v_n-u_n) \, \mathrm{d}\boldsymbol{s} \nonumber\\ &\quad+\int_{\varGamma_b} \alpha(\boldsymbol{u})\boldsymbol{\mathsf{T}}\boldsymbol{u}\boldsymbol{\cdot} \boldsymbol{\mathsf{T}}(\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s} +\int_{\varGamma_{N}} \rho_i g (h-z) (v_n-u_n) \, \mathrm{d}\boldsymbol{s} \geqslant 0. \end{align}
\begin{align} &\int_{\varOmega} \left[ 2\eta(\boldsymbol{u})\boldsymbol{\mathsf{D}}(\boldsymbol{u})\boldsymbol{:}\boldsymbol{\mathsf{D}}(\boldsymbol{v}-\boldsymbol{u}) - \rho_i\boldsymbol{g}\boldsymbol{\cdot}(\boldsymbol{v}-\boldsymbol{u}) -p\boldsymbol{\nabla}\boldsymbol{\cdot} (\boldsymbol{v}-\boldsymbol{u})\right] \mathrm{d}\boldsymbol{x} + \int_{\varGamma_s} p_w (v_n-u_n) \, \mathrm{d}\boldsymbol{s} \nonumber\\ &\quad+\int_{\varGamma_b} \alpha(\boldsymbol{u})\boldsymbol{\mathsf{T}}\boldsymbol{u}\boldsymbol{\cdot} \boldsymbol{\mathsf{T}}(\boldsymbol{v}-\boldsymbol{u}) \, \mathrm{d}\boldsymbol{s} +\int_{\varGamma_{N}} \rho_i g (h-z) (v_n-u_n) \, \mathrm{d}\boldsymbol{s} \geqslant 0. \end{align}To simplify notation, we write
 \begin{align} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}) &= \int_{\varOmega} \left[ 2\eta(\boldsymbol{u})\boldsymbol{\mathsf{D}}(\boldsymbol{u})\boldsymbol{:}\boldsymbol{\mathsf{D}}(\boldsymbol{v}) - \rho_i\boldsymbol{g}\boldsymbol{\cdot}\boldsymbol{v}\right] \mathrm{d}\boldsymbol{x} +\int_{\varGamma_b} \alpha(\boldsymbol{u})\boldsymbol{\mathsf{T}}\boldsymbol{u}\boldsymbol{\cdot} \boldsymbol{\mathsf{T}}\boldsymbol{v} \, \mathrm{d}\boldsymbol{s}\nonumber\\ &\quad +\int_{\varGamma_{N}}\rho_i g (h-z) v_n \, \mathrm{d}\boldsymbol{s} \end{align}
\begin{align} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}) &= \int_{\varOmega} \left[ 2\eta(\boldsymbol{u})\boldsymbol{\mathsf{D}}(\boldsymbol{u})\boldsymbol{:}\boldsymbol{\mathsf{D}}(\boldsymbol{v}) - \rho_i\boldsymbol{g}\boldsymbol{\cdot}\boldsymbol{v}\right] \mathrm{d}\boldsymbol{x} +\int_{\varGamma_b} \alpha(\boldsymbol{u})\boldsymbol{\mathsf{T}}\boldsymbol{u}\boldsymbol{\cdot} \boldsymbol{\mathsf{T}}\boldsymbol{v} \, \mathrm{d}\boldsymbol{s}\nonumber\\ &\quad +\int_{\varGamma_{N}}\rho_i g (h-z) v_n \, \mathrm{d}\boldsymbol{s} \end{align} \begin{align} b_\varOmega(q,\boldsymbol{u}) &= \int_\varOmega q\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u} \, \mathrm{d}\boldsymbol{x}, \end{align}
\begin{align} b_\varOmega(q,\boldsymbol{u}) &= \int_\varOmega q\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u} \, \mathrm{d}\boldsymbol{x}, \end{align}
for  $\boldsymbol {u},\boldsymbol {v}\in V$ and
$\boldsymbol {u},\boldsymbol {v}\in V$ and  $q\in Q$, which constitute the usual weak forms in Stokes ice-flow models. We also define
$q\in Q$, which constitute the usual weak forms in Stokes ice-flow models. We also define
 \begin{gather} \mathcal{P}_{w}^o (\boldsymbol{u},\boldsymbol{v}) = \rho_w g \int_{\varGamma_s} \left[ \ell - s + (\Delta t) u_n \right] v_n \,\mathrm{d}\boldsymbol{s}, \end{gather}
\begin{gather} \mathcal{P}_{w}^o (\boldsymbol{u},\boldsymbol{v}) = \rho_w g \int_{\varGamma_s} \left[ \ell - s + (\Delta t) u_n \right] v_n \,\mathrm{d}\boldsymbol{s}, \end{gather} \begin{gather}\mathcal{P}_{w}^l(\boldsymbol{u},\boldsymbol{v}) = \rho_wg \int_{\varGamma_s} [ \bar{s} - s + (\Delta t) (u_n + {\dot{\mathcal{V}}}/{|\varGamma_w|} )] v_n \,\mathrm{d}\boldsymbol{s}, \end{gather}
\begin{gather}\mathcal{P}_{w}^l(\boldsymbol{u},\boldsymbol{v}) = \rho_wg \int_{\varGamma_s} [ \bar{s} - s + (\Delta t) (u_n + {\dot{\mathcal{V}}}/{|\varGamma_w|} )] v_n \,\mathrm{d}\boldsymbol{s}, \end{gather} \begin{gather}b_\varGamma (q_w,\boldsymbol{u}) ={-} \int_{\varGamma_s} q_wu_n\, \mathrm{d}\boldsymbol{s}, \end{gather}
\begin{gather}b_\varGamma (q_w,\boldsymbol{u}) ={-} \int_{\varGamma_s} q_wu_n\, \mathrm{d}\boldsymbol{s}, \end{gather}
for  $\boldsymbol {u},\boldsymbol {v}\in V$ and
$\boldsymbol {u},\boldsymbol {v}\in V$ and  $q_w\in \mathbb {R}$, which originate from the weak forms of the ocean water pressure (2.14), subglacial-lake water pressure (2.17) and lake volume-change constraint (2.15), respectively. In (3.8) and (3.9),
$q_w\in \mathbb {R}$, which originate from the weak forms of the ocean water pressure (2.14), subglacial-lake water pressure (2.17) and lake volume-change constraint (2.15), respectively. In (3.8) and (3.9),  $s$ and
$s$ and  $\bar {s}$ are known from the previous time step (§ 2.3).
$\bar {s}$ are known from the previous time step (§ 2.3).
We supplement inequality (3.5) with the weak form of incompressibility (3.7) and sub-shelf water pressure (3.8) to arrive at the mixed variational problem for marine ice sheets. We seek  $(\boldsymbol {u},p)\in K \times Q$ such that
$(\boldsymbol {u},p)\in K \times Q$ such that
 \begin{equation} \left\{\begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) + \mathcal{P}_{w}^o(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) - b_\varOmega(p,\boldsymbol{v}-\boldsymbol{u}) \geqslant 0 \\ b_\varOmega(q,\boldsymbol{u}) = 0 \end{array}\right.\end{equation}
\begin{equation} \left\{\begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) + \mathcal{P}_{w}^o(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) - b_\varOmega(p,\boldsymbol{v}-\boldsymbol{u}) \geqslant 0 \\ b_\varOmega(q,\boldsymbol{u}) = 0 \end{array}\right.\end{equation}
for all  $(\boldsymbol {v},q)\in K\times Q$. Similarly, the variational problem for subglacial lakes is to find
$(\boldsymbol {v},q)\in K\times Q$. Similarly, the variational problem for subglacial lakes is to find  $(\boldsymbol {u},p,\bar {p}_w)\in K \times Q\times \mathbb {R}$ such that
$(\boldsymbol {u},p,\bar {p}_w)\in K \times Q\times \mathbb {R}$ such that
 \begin{equation} \left\{ \begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) + \mathcal{P}_{w}^l(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) - b_\varOmega(p,\boldsymbol{v}-\boldsymbol{u}) - b_\varGamma(\bar{p}_w,\boldsymbol{v}-\boldsymbol{u}) \geqslant 0 \\ b_\varOmega(q,\boldsymbol{u}) + b_\varGamma(q_w,\boldsymbol{u}) = q_w\dot{\mathcal{V}} \end{array}\right.\end{equation}
\begin{equation} \left\{ \begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) + \mathcal{P}_{w}^l(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) - b_\varOmega(p,\boldsymbol{v}-\boldsymbol{u}) - b_\varGamma(\bar{p}_w,\boldsymbol{v}-\boldsymbol{u}) \geqslant 0 \\ b_\varOmega(q,\boldsymbol{u}) + b_\varGamma(q_w,\boldsymbol{u}) = q_w\dot{\mathcal{V}} \end{array}\right.\end{equation}
for all  $(\boldsymbol {v},q,q_w)\in K \times Q \times \mathbb {R}$. In deriving (3.12), we used the subglacial-lake volume-change constraint (2.15) and the expression for water pressure (2.17). The form of (3.12) shows that the mean water pressure
$(\boldsymbol {v},q,q_w)\in K \times Q \times \mathbb {R}$. In deriving (3.12), we used the subglacial-lake volume-change constraint (2.15) and the expression for water pressure (2.17). The form of (3.12) shows that the mean water pressure  $\bar {p}_w$ acts as a Lagrange multiplier that enforces the volume-change constraint, analogous to
$\bar {p}_w$ acts as a Lagrange multiplier that enforces the volume-change constraint, analogous to  $p$ enforcing incompressibility; we elaborate on this in the context of the penalty formulation in § 3.3.
$p$ enforcing incompressibility; we elaborate on this in the context of the penalty formulation in § 3.3.
3.2. Minimisation formulation
We now introduce minimisation formulations of problems (3.11) and (3.12) that justify the penalty methods discussed in the following section. We denote the set of divergence-free admissible velocity fields that obey the volume-change constraint by
 \begin{equation} K_\star{=} \{\boldsymbol{u}\in K:\ b_\varOmega(q,\boldsymbol{u}) + b_\varGamma(q_w,\boldsymbol{u})=q_w\dot{\mathcal{V}} \ \mathrm{for}\ \mathrm{all}\ (q,q_w)\in Q\times \mathbb{R} \}, \end{equation}
\begin{equation} K_\star{=} \{\boldsymbol{u}\in K:\ b_\varOmega(q,\boldsymbol{u}) + b_\varGamma(q_w,\boldsymbol{u})=q_w\dot{\mathcal{V}} \ \mathrm{for}\ \mathrm{all}\ (q,q_w)\in Q\times \mathbb{R} \}, \end{equation}
which is a closed, convex subset of  $V$ (Appendix A.2). On this subset, the mixed variational problem (3.12) reduces to finding
$V$ (Appendix A.2). On this subset, the mixed variational problem (3.12) reduces to finding  $\boldsymbol {u}\in K_\star$ such that
$\boldsymbol {u}\in K_\star$ such that
 \begin{equation} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) + \mathcal{P}_w^l(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) \geqslant 0 \end{equation}
\begin{equation} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) + \mathcal{P}_w^l(\boldsymbol{u},\boldsymbol{v}-\boldsymbol{u}) \geqslant 0 \end{equation}
for all  $\boldsymbol {v}\in K_\star$. For the sake of clarity, we set the regularisation parameter to
$\boldsymbol {v}\in K_\star$. For the sake of clarity, we set the regularisation parameter to  $\delta =0$ in the flow law (2.9) and sliding law (2.25). The results below still hold for
$\delta =0$ in the flow law (2.9) and sliding law (2.25). The results below still hold for  $\delta >0$ (Jouvet & Rappaz Reference Jouvet and Rappaz2011). The left side of (3.14) is the Gâteaux derivative of the functional
$\delta >0$ (Jouvet & Rappaz Reference Jouvet and Rappaz2011). The left side of (3.14) is the Gâteaux derivative of the functional
 \begin{align} \mathcal{J}(\boldsymbol{v}) &= \int_{\varOmega} \frac{B}{r}|\boldsymbol{\mathsf{D}}(\boldsymbol{v})|^{r} -\rho_i\boldsymbol{g}\boldsymbol{\cdot}\boldsymbol{v} \, \mathrm{d}\boldsymbol{x} + \int_{\varGamma_b} \frac{C}{r} |\boldsymbol{\mathsf{T}}\boldsymbol{v}|^{r} \, \mathrm{d}\boldsymbol{s} + \int_{\varGamma_{N}} \rho_i g (h-z) v_n \, \mathrm{d}\boldsymbol{s} \nonumber\\ &\quad + \rho_w g\int_{\varGamma_s} \gamma_1 v_n^2 + \left(\gamma_2-s\right) v_n \,\mathrm{d}\boldsymbol{s} \end{align}
\begin{align} \mathcal{J}(\boldsymbol{v}) &= \int_{\varOmega} \frac{B}{r}|\boldsymbol{\mathsf{D}}(\boldsymbol{v})|^{r} -\rho_i\boldsymbol{g}\boldsymbol{\cdot}\boldsymbol{v} \, \mathrm{d}\boldsymbol{x} + \int_{\varGamma_b} \frac{C}{r} |\boldsymbol{\mathsf{T}}\boldsymbol{v}|^{r} \, \mathrm{d}\boldsymbol{s} + \int_{\varGamma_{N}} \rho_i g (h-z) v_n \, \mathrm{d}\boldsymbol{s} \nonumber\\ &\quad + \rho_w g\int_{\varGamma_s} \gamma_1 v_n^2 + \left(\gamma_2-s\right) v_n \,\mathrm{d}\boldsymbol{s} \end{align}
in the direction  $\boldsymbol {v}-\boldsymbol {u}$, where
$\boldsymbol {v}-\boldsymbol {u}$, where  $\gamma _1 = {\Delta t}/{2}$ and
$\gamma _1 = {\Delta t}/{2}$ and  $\gamma _2 = {\dot {\mathcal {V}}\Delta t}/{|\varGamma _w|}+ \bar {s}$.
$\gamma _2 = {\dot {\mathcal {V}}\Delta t}/{|\varGamma _w|}+ \bar {s}$.
The problem of minimising  $\mathcal {J}$ (3.15) over
$\mathcal {J}$ (3.15) over  $K_\star$ is equivalent to solving variational inequality (3.14) (Kikuchi & Oden Reference Kikuchi and Oden1988, Theorem 3.7). The functional
$K_\star$ is equivalent to solving variational inequality (3.14) (Kikuchi & Oden Reference Kikuchi and Oden1988, Theorem 3.7). The functional  $\mathcal {J}$ is convex, continuous and coercive (Appendix A.2). These properties ensure that a minimiser
$\mathcal {J}$ is convex, continuous and coercive (Appendix A.2). These properties ensure that a minimiser  $\boldsymbol {u}\in {K}_\star$ of
$\boldsymbol {u}\in {K}_\star$ of  $\mathcal {J}$ exists (Ekeland & Temam Reference Ekeland and Temam1999, Proposition 1.2). Uniqueness follows from the strict convexity of
$\mathcal {J}$ exists (Ekeland & Temam Reference Ekeland and Temam1999, Proposition 1.2). Uniqueness follows from the strict convexity of  $\mathcal {J}$ (Chen, Gunzburger & Perego Reference Chen, Gunzburger and Perego2013, Lemmas 9 and 12). Therefore, there exists a unique solution
$\mathcal {J}$ (Chen, Gunzburger & Perego Reference Chen, Gunzburger and Perego2013, Lemmas 9 and 12). Therefore, there exists a unique solution  $\boldsymbol {u}$ to the reduced problem (3.14). Existence and uniqueness of the corresponding pressures
$\boldsymbol {u}$ to the reduced problem (3.14). Existence and uniqueness of the corresponding pressures  $p$ and
$p$ and  $\bar {p}_w$ in the mixed formulation (3.12) follow from an inf–sup condition on the constraint operators
$\bar {p}_w$ in the mixed formulation (3.12) follow from an inf–sup condition on the constraint operators  $b_\varOmega$ and
$b_\varOmega$ and  $b_\varGamma$ (Appendix A.3). Existence and uniqueness of solutions to the marine ice-sheet problem follows the same argument applied to the functional
$b_\varGamma$ (Appendix A.3). Existence and uniqueness of solutions to the marine ice-sheet problem follows the same argument applied to the functional  $\mathcal {J}$, with
$\mathcal {J}$, with  $\gamma _2 =\ell$, over the set of divergence-free admissible velocity fields.
$\gamma _2 =\ell$, over the set of divergence-free admissible velocity fields.
3.3. Penalty formulation
Working with the set  $K$ is inconvenient for arbitrary bed geometry. Instead, we introduce a penalty formulation that is posed over
$K$ is inconvenient for arbitrary bed geometry. Instead, we introduce a penalty formulation that is posed over  $V$. To enforce the impenetrability constraint, we introduce the penalty functional
$V$. To enforce the impenetrability constraint, we introduce the penalty functional
 \begin{equation} \varPi(\boldsymbol{v}) = \int_{\varGamma_b} \tfrac{1}{2}\left(v_n^2 + v_n|v_n| \right) \mathrm{d}\boldsymbol{s}. \end{equation}
\begin{equation} \varPi(\boldsymbol{v}) = \int_{\varGamma_b} \tfrac{1}{2}\left(v_n^2 + v_n|v_n| \right) \mathrm{d}\boldsymbol{s}. \end{equation}
The Gâteaux derivative of  $\varPi$ at
$\varPi$ at  $\boldsymbol {u}$ in a direction
$\boldsymbol {u}$ in a direction  $\boldsymbol {v}$ is
$\boldsymbol {v}$ is
 \begin{equation} \varPi'(\boldsymbol{u},\boldsymbol{v}) = \int_{\varGamma_b} \left(u_n + |u_n| \right)v_n \, \mathrm{d}\boldsymbol{s}. \end{equation}
\begin{equation} \varPi'(\boldsymbol{u},\boldsymbol{v}) = \int_{\varGamma_b} \left(u_n + |u_n| \right)v_n \, \mathrm{d}\boldsymbol{s}. \end{equation}
 $\varPi$ and
$\varPi$ and  $\varPi '$ are non-zero only when impenetrability is violated (i.e.when
$\varPi '$ are non-zero only when impenetrability is violated (i.e.when  $u_n>0$). Therefore,
$u_n>0$). Therefore,  $({1}/{\varepsilon })\varPi$ (and
$({1}/{\varepsilon })\varPi$ (and  $({1}/{\varepsilon })\varPi '$) penalises
$({1}/{\varepsilon })\varPi '$) penalises  $u_n>0$ when the penalty parameter
$u_n>0$ when the penalty parameter  $\varepsilon$ is chosen to be small. We seek
$\varepsilon$ is chosen to be small. We seek  $\boldsymbol {u}\in V$ that minimises the penalised functional
$\boldsymbol {u}\in V$ that minimises the penalised functional
 \begin{equation} \mathcal{J}_\varepsilon(\boldsymbol{v}) = \mathcal{J}(\boldsymbol{v}) + \frac{1}{\varepsilon}\varPi(\boldsymbol{v}), \end{equation}
\begin{equation} \mathcal{J}_\varepsilon(\boldsymbol{v}) = \mathcal{J}(\boldsymbol{v}) + \frac{1}{\varepsilon}\varPi(\boldsymbol{v}), \end{equation}
and satisfies the relevant equality constraints, depending on the problem. Minimisers of  $\mathcal {J}_\varepsilon$ converge weakly to minimisers of
$\mathcal {J}_\varepsilon$ converge weakly to minimisers of  $\mathcal {J}$ as
$\mathcal {J}$ as  $\varepsilon \to 0$, justifying the numerical method (Kikuchi & Oden Reference Kikuchi and Oden1988, Theorem 3.15).
$\varepsilon \to 0$, justifying the numerical method (Kikuchi & Oden Reference Kikuchi and Oden1988, Theorem 3.15).
To enforce the equality constraints, we introduce the Lagrangian for the marine problem
 \begin{equation} \mathcal{L}^o(\boldsymbol{v},q) = \mathcal{J}_\varepsilon(\boldsymbol{v}) - b_\varOmega(q,\boldsymbol{v}), \end{equation}
\begin{equation} \mathcal{L}^o(\boldsymbol{v},q) = \mathcal{J}_\varepsilon(\boldsymbol{v}) - b_\varOmega(q,\boldsymbol{v}), \end{equation}and for lake problem
 \begin{equation} \mathcal{L}^l(\boldsymbol{v},q,q_w) = \mathcal{J}_\varepsilon(\boldsymbol{v}) - b_\varOmega(q,\boldsymbol{v})- b_\varGamma(q_w,\boldsymbol{v}) + q_w\dot{\mathcal{V}}, \end{equation}
\begin{equation} \mathcal{L}^l(\boldsymbol{v},q,q_w) = \mathcal{J}_\varepsilon(\boldsymbol{v}) - b_\varOmega(q,\boldsymbol{v})- b_\varGamma(q_w,\boldsymbol{v}) + q_w\dot{\mathcal{V}}, \end{equation}
where the pressures  $(q,q_w)\in Q\times \mathbb {R}$ have been reintroduced as Lagrange multipliers. The solutions
$(q,q_w)\in Q\times \mathbb {R}$ have been reintroduced as Lagrange multipliers. The solutions  $(\boldsymbol {u},p)$ to the marine problem and
$(\boldsymbol {u},p)$ to the marine problem and  $(\boldsymbol {u},p,\bar {p}_w)$ to the lake problem are saddle points of (3.19) and (3.20), respectively. We obtain the penalty formulations of (3.11) and (3.12) by taking Gâteaux derivatives of these Lagrangians (Kikuchi & Oden Reference Kikuchi and Oden1988, Theorem 3.13).
$(\boldsymbol {u},p,\bar {p}_w)$ to the lake problem are saddle points of (3.19) and (3.20), respectively. We obtain the penalty formulations of (3.11) and (3.12) by taking Gâteaux derivatives of these Lagrangians (Kikuchi & Oden Reference Kikuchi and Oden1988, Theorem 3.13).
For the marine ice-sheet model, the penalised problem is to find  $(\boldsymbol {u},p)\in V\times Q$, satisfying the Dirichlet condition, such that
$(\boldsymbol {u},p)\in V\times Q$, satisfying the Dirichlet condition, such that
 \begin{equation} \left\{\begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}) + \mathcal{P}_w^o(\boldsymbol{u},\boldsymbol{v}) - b_\varOmega(p,\boldsymbol{v}) + \dfrac{1}{\varepsilon}\varPi'(\boldsymbol{u},\boldsymbol{v}) = 0 \\ b_\varOmega(q,\boldsymbol{u}) = 0 \end{array}\right.\end{equation}
\begin{equation} \left\{\begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}) + \mathcal{P}_w^o(\boldsymbol{u},\boldsymbol{v}) - b_\varOmega(p,\boldsymbol{v}) + \dfrac{1}{\varepsilon}\varPi'(\boldsymbol{u},\boldsymbol{v}) = 0 \\ b_\varOmega(q,\boldsymbol{u}) = 0 \end{array}\right.\end{equation}
for all  $(\boldsymbol {v},q)\in V_D\times Q$, where
$(\boldsymbol {v},q)\in V_D\times Q$, where  $V_D=\{\boldsymbol {v}\in V:\ v_x|_{\varGamma _D}=0 \}$. Similarly, the subglacial-lake problem reduces to finding
$V_D=\{\boldsymbol {v}\in V:\ v_x|_{\varGamma _D}=0 \}$. Similarly, the subglacial-lake problem reduces to finding  $(\boldsymbol {u},p,\bar {p}_w)\in V\times Q\times \mathbb {R}$ such that
$(\boldsymbol {u},p,\bar {p}_w)\in V\times Q\times \mathbb {R}$ such that
 \begin{equation} \left\{ \begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}) + \mathcal{P}_w^l(\boldsymbol{u},\boldsymbol{v}) - b_\varOmega(p,\boldsymbol{v}) - b_\varGamma(\bar{p}_w,\boldsymbol{v}) + \dfrac{1}{\varepsilon}\varPi'(\boldsymbol{u},\boldsymbol{v}) = 0 \\ b_\varOmega(q,\boldsymbol{u}) + b_\varGamma(q_w,\boldsymbol{u}) = q_w\dot{\mathcal{V}} \end{array}\right.\end{equation}
\begin{equation} \left\{ \begin{array}{@{}ll} \mathcal{F}(\boldsymbol{u},\boldsymbol{v}) + \mathcal{P}_w^l(\boldsymbol{u},\boldsymbol{v}) - b_\varOmega(p,\boldsymbol{v}) - b_\varGamma(\bar{p}_w,\boldsymbol{v}) + \dfrac{1}{\varepsilon}\varPi'(\boldsymbol{u},\boldsymbol{v}) = 0 \\ b_\varOmega(q,\boldsymbol{u}) + b_\varGamma(q_w,\boldsymbol{u}) = q_w\dot{\mathcal{V}} \end{array}\right.\end{equation}
for all  $(\boldsymbol {v},q,q_w)\in V_D\times Q\times \mathbb {R}$. Variational problems (3.21) and (3.22) readily extend to three spatial dimensions; the details depend on the additional boundary conditions on the side walls of the domain, that must be chosen.
$(\boldsymbol {v},q,q_w)\in V_D\times Q\times \mathbb {R}$. Variational problems (3.21) and (3.22) readily extend to three spatial dimensions; the details depend on the additional boundary conditions on the side walls of the domain, that must be chosen.
3.4. Numerical implementation
At each time step, we solve variational problem (3.21) or (3.22) with the finite-element package FEniCS (Logg, Mardal & Wells Reference Logg, Mardal and Wells2012; Alnæs et al. Reference Alnæs, Blechta, Hake, Johansson, Kehlet, Logg, Richardson, Ring, Rognes and Wells2015). We use the Taylor–Hood element for velocity and pressure (Jouvet & Rappaz Reference Jouvet and Rappaz2011). In the subglacial-lake case, the Taylor–Hood element is augmented with a Lagrange multiplier for  $\bar {p}_w,q_w\in \mathbb {R}$, constituting a single additional global degree of freedom. We update the free surfaces
$\bar {p}_w,q_w\in \mathbb {R}$, constituting a single additional global degree of freedom. We update the free surfaces  $h$ and
$h$ and  $s$ using (2.10) and (2.11) and the velocity solution, moving the boundary nodes of the mesh to obtain the new domain. The geometric constraint
$s$ using (2.10) and (2.11) and the velocity solution, moving the boundary nodes of the mesh to obtain the new domain. The geometric constraint  $s\geqslant \beta$ is then enforced explicitly. The interior nodes of the mesh are smoothed using the ALE (arbitrary Lagrangian–Eulerian) class in DOLFIN (Logg & Wells Reference Logg and Wells2010; Logg et al. Reference Logg, Mardal and Wells2012). For the simulations discussed in § 4, we set the element width to 250 m at the upper surface and refine it to
$s\geqslant \beta$ is then enforced explicitly. The interior nodes of the mesh are smoothed using the ALE (arbitrary Lagrangian–Eulerian) class in DOLFIN (Logg & Wells Reference Logg and Wells2010; Logg et al. Reference Logg, Mardal and Wells2012). For the simulations discussed in § 4, we set the element width to 250 m at the upper surface and refine it to  $\Delta x = 12.5\ \textrm {m}$ at the lower surface. We choose the regularisation parameter
$\Delta x = 12.5\ \textrm {m}$ at the lower surface. We choose the regularisation parameter  $\delta =10^{-15}$, flow law coefficient
$\delta =10^{-15}$, flow law coefficient  $B = 8.6 \times 10^{7}\ \textrm {Pa}\ \textrm {s}^{1/3}$, flow law exponent
$B = 8.6 \times 10^{7}\ \textrm {Pa}\ \textrm {s}^{1/3}$, flow law exponent  $r=4/3$, friction coefficient
$r=4/3$, friction coefficient  $C = 10^{5}\ \textrm {Pa}\ \textrm {s}^{1/3}\ \textrm {m}^{-1/3}$ and penalty parameter
$C = 10^{5}\ \textrm {Pa}\ \textrm {s}^{1/3}\ \textrm {m}^{-1/3}$ and penalty parameter  $\varepsilon = 10^{-13}$. The time-step sizes
$\varepsilon = 10^{-13}$. The time-step sizes  $\Delta t$ for the different problems are provided subsequently. These parameters provide well-resolved and converged solutions (Appendix B.1).
$\Delta t$ for the different problems are provided subsequently. These parameters provide well-resolved and converged solutions (Appendix B.1).
In general, the true grounding-line positions exist between the mesh nodes. The numerical grounding-line positions depend on how the discretised ice–water (2.2) and ice–bed (2.3) boundaries are defined. Here, the discretised ice–bed boundary is defined as all element edges satisfying  $s-\beta \leqslant \tau$ for a specified numerical tolerance
$s-\beta \leqslant \tau$ for a specified numerical tolerance  $\tau$, 1 mm for all examples herein. The discretised ice–water boundary includes all edges on the lower boundary satisfying
$\tau$, 1 mm for all examples herein. The discretised ice–water boundary includes all edges on the lower boundary satisfying  $s-\beta > \tau$ and the edges where the true grounding lines exist (i.e. where
$s-\beta > \tau$ and the edges where the true grounding lines exist (i.e. where  $s-\beta -\tau$ changes sign). This choice of discretisation corresponds to the ‘last-grounded’ scheme in Gagliardini et al. (Reference Gagliardini, Brondex, Gillet-Chaulet, Tavard, Peyaud and DURAND2016). Sub-grid parameterisations of the transition between these boundaries have been developed (Seroussi et al. Reference Seroussi, Morlighem, Larour, Rignot and Khazendar2014; Cheng et al. Reference Cheng, Lötstedt and von Sydow2020). We do not explore these schemes here because they introduce additional terms in the weak forms that depend on the grounding-line positions. For plotting and convergence testing, we estimate the true grounding-line positions by linear interpolation between the mesh nodes. Throughout, we plot the interpolated positions rather than the adjacent mesh nodes where the discretised ice–water and ice–bed boundaries meet.
$s-\beta -\tau$ changes sign). This choice of discretisation corresponds to the ‘last-grounded’ scheme in Gagliardini et al. (Reference Gagliardini, Brondex, Gillet-Chaulet, Tavard, Peyaud and DURAND2016). Sub-grid parameterisations of the transition between these boundaries have been developed (Seroussi et al. Reference Seroussi, Morlighem, Larour, Rignot and Khazendar2014; Cheng et al. Reference Cheng, Lötstedt and von Sydow2020). We do not explore these schemes here because they introduce additional terms in the weak forms that depend on the grounding-line positions. For plotting and convergence testing, we estimate the true grounding-line positions by linear interpolation between the mesh nodes. Throughout, we plot the interpolated positions rather than the adjacent mesh nodes where the discretised ice–water and ice–bed boundaries meet.
Verification and validation of the numerical model are established by providing a known subglacial-lake volume change rate. The computed results can then be compared with the true volume change and, in some cases, an expected grounding-line migration rate. Using this approach, we discuss convergence of the numerical method with decreasing  $\varepsilon$,
$\varepsilon$,  $\Delta t$ and
$\Delta t$ and  $\Delta x$ (Appendix B.1). We provide a second benchmark test for validation that is based on an expected rate of grounding-line migration for a slow-filling triangular lake (Appendix B.2). For the marine problem, satisfaction of the flotation condition (2.23) near the outflow boundary is also a useful validation measure (figures 2 and 3). The code is openly available as an archived Git repository (Stubblefield Reference Stubblefield2020, doi:10.5281/zenodo.4302610).
$\Delta x$ (Appendix B.1). We provide a second benchmark test for validation that is based on an expected rate of grounding-line migration for a slow-filling triangular lake (Appendix B.2). For the marine problem, satisfaction of the flotation condition (2.23) near the outflow boundary is also a useful validation measure (figures 2 and 3). The code is openly available as an archived Git repository (Stubblefield Reference Stubblefield2020, doi:10.5281/zenodo.4302610).

Figure 2. (a) Sea-level change  $\Delta \ell = \ell (t)-\ell (0)$, mean ice–air elevation change
$\Delta \ell = \ell (t)-\ell (0)$, mean ice–air elevation change  $\Delta \bar {h} = \bar {h}(t)-\bar {h}(0)$ and mean ice–water elevation change
$\Delta \bar {h} = \bar {h}(t)-\bar {h}(0)$ and mean ice–water elevation change  $\Delta \bar {s} = \bar {s}(t)-\bar {s}(0)$ over the course of four tidal cycles, where
$\Delta \bar {s} = \bar {s}(t)-\bar {s}(0)$ over the course of four tidal cycles, where  $\bar {h}$ and
$\bar {h}$ and  $\bar {s}$ denote the mean of
$\bar {s}$ denote the mean of  $h$ and
$h$ and  $s$ over the ice–water boundary. The black diamonds mark the times and relative sea levels associated with the free-surface plots in figure 3. (b) Comparison of the outflow elevation
$s$ over the ice–water boundary. The black diamonds mark the times and relative sea levels associated with the free-surface plots in figure 3. (b) Comparison of the outflow elevation  $\Delta h_{{out}} = h(L/2,t)-h(L/2,0)$ with the flotation elevation
$\Delta h_{{out}} = h(L/2,t)-h(L/2,0)$ with the flotation elevation  $\Delta h_f = h_f(t)-h_f(0)$, given by (2.23). (c) Minimum and maximum grounding-line positions over time. An extended grounding zone forms when sea level falls, characterised by the presence of a thin water layer between
$\Delta h_f = h_f(t)-h_f(0)$, given by (2.23). (c) Minimum and maximum grounding-line positions over time. An extended grounding zone forms when sea level falls, characterised by the presence of a thin water layer between  $x_-$ and
$x_-$ and  $x_+$ (discussed in § 4.1). The extended grounding zone is lost when sea level begins to rise, resulting in a single grounding line. We plot the results for
$x_+$ (discussed in § 4.1). The extended grounding zone is lost when sea level begins to rise, resulting in a single grounding line. We plot the results for  $t\geqslant 5$ days after transients in the grounding-line time series have relaxed.
$t\geqslant 5$ days after transients in the grounding-line time series have relaxed.

Figure 3. Plot of free-surface geometry over the course of one tidal cycle, with time increasing from (a–d). The times and relative sea levels are noted in figure 2(a). The initial geometry is depicted by dashed black lines in (a). Sea level  $\ell$ is depicted by a dash-dotted green line and the ice-flotation elevation
$\ell$ is depicted by a dash-dotted green line and the ice-flotation elevation  $h_f$ (2.23) is depicted by a dashed purple line. For visualisation, 98 % of the initial sea-level and ice-surface elevation have been subtracted from
$h_f$ (2.23) is depicted by a dashed purple line. For visualisation, 98 % of the initial sea-level and ice-surface elevation have been subtracted from  $\ell$ and
$\ell$ and  $h$, respectively. The reference upper surface elevation is
$h$, respectively. The reference upper surface elevation is  $h_0=500$ m. The sea levels in (b,d) are the same. The colour scheme follows figure 1. The minimum and maximum grounding-line positions
$h_0=500$ m. The sea levels in (b,d) are the same. The colour scheme follows figure 1. The minimum and maximum grounding-line positions  $x_\pm$ are noted by black triangles.
$x_\pm$ are noted by black triangles.
4. Numerical examples
4.1. Tidal cycles
Here, we illustrate the grounding-line response to tidal cycles in the marine ice-sheet problem. We consider sinusoidal tidal cycles of the form
 \begin{equation} \ell(t) = \frac{\rho_i}{\rho_w}h_0 + \sin(2{\rm \pi} t/P), \end{equation}
\begin{equation} \ell(t) = \frac{\rho_i}{\rho_w}h_0 + \sin(2{\rm \pi} t/P), \end{equation}
where the initial ice-shelf surface elevation is  $h_0=500\ \textrm {m}$, the period
$h_0=500\ \textrm {m}$, the period  $P$ is a half day and the maximum deviation from mean sea level
$P$ is a half day and the maximum deviation from mean sea level  $({\rho _i}/{\rho _w})h_0$ is
$({\rho _i}/{\rho _w})h_0$ is  $1 m$ (figure 2). We choose a linear bed geometry
$1 m$ (figure 2). We choose a linear bed geometry
 \begin{equation} \beta(x) ={-}\frac{5x}{L}, \end{equation}
\begin{equation} \beta(x) ={-}\frac{5x}{L}, \end{equation}
where the length  $L=20\ \textrm {km}$. The inflow speed is set to
$L=20\ \textrm {km}$. The inflow speed is set to  $u_0=1\ \textrm {km}\ \textrm {yr}^{-1}$ on
$u_0=1\ \textrm {km}\ \textrm {yr}^{-1}$ on  $\varGamma _D$. We assume that the cryostatic condition (2.21) holds on the outflow boundary
$\varGamma _D$. We assume that the cryostatic condition (2.21) holds on the outflow boundary  $\varGamma _N$ (figure 1). To construct appropriate initial free surfaces for the tidal problem, we keep the sea level fixed at
$\varGamma _N$ (figure 1). To construct appropriate initial free surfaces for the tidal problem, we keep the sea level fixed at  $\ell (t)=(\rho _i/\rho _w) h_0$ and evolve the initial conditions
$\ell (t)=(\rho _i/\rho _w) h_0$ and evolve the initial conditions  $s(x,0) = \max (\beta (x),0)$ and
$s(x,0) = \max (\beta (x),0)$ and  $h(x,0) = h_0$ to time
$h(x,0) = h_0$ to time  $t=0.35$ yr, using a time-step size of
$t=0.35$ yr, using a time-step size of  $\Delta t=5\times 10^{-4}\ \textrm {yr}$. The resulting initial ice-sheet profile for the tidal simulation thickens inland from the shelf (figure 3a). For the tidal simulation, we reduce the time step to
$\Delta t=5\times 10^{-4}\ \textrm {yr}$. The resulting initial ice-sheet profile for the tidal simulation thickens inland from the shelf (figure 3a). For the tidal simulation, we reduce the time step to  $\Delta t=2\times 10^{-6}\ \textrm {yr}$ to obtain a similar number of time steps per oscillation period as in the subglacial-lake problem where numerical accuracy has been verified. We explore numerical convergence and accuracy with respect to (
$\Delta t=2\times 10^{-6}\ \textrm {yr}$ to obtain a similar number of time steps per oscillation period as in the subglacial-lake problem where numerical accuracy has been verified. We explore numerical convergence and accuracy with respect to ( $\Delta x, \Delta t$) in Appendix B.1 and demonstrate that these solutions are well resolved in space and time.
$\Delta x, \Delta t$) in Appendix B.1 and demonstrate that these solutions are well resolved in space and time.
The mean elevations of the ice–water interface and overlying ice–air interface closely follow the tidal cycle over time (figure 2a). At the outflow boundary, the ice elevation closely matches the flotation condition (2.23) that results from the stress boundary conditions (figure 2b). The grounding-line response is also periodic in time, migrating roughly 5 km over each cycle (figure 2c). The free-surface geometry over the course of one tidal cycle is shown in figure 3. We provide a movie of the complete simulation in the supporting information (supplementary movie 1). An intriguing feature of this solution is that, for oscillations on a tidal time scale, multiple contact points can form (figure 2c).
The tidal cycle causes flexure in the ice sheet that leads to multiple contact points (figure 4). After high tide, ice begins to make contact with the bed as sea level falls. The strong downward flexure of the floating ice shelf causes an upward flexure inland of the main grounding line  $x_+$, which acts like a hinge (figure 4a). Ice is lifted from the bed in a zone adjacent to
$x_+$, which acts like a hinge (figure 4a). Ice is lifted from the bed in a zone adjacent to  $x_+$, forming a
$x_+$, forming a  $\sim$1 mm thick water layer of width
$\sim$1 mm thick water layer of width  $\sim$1 km (figure 4b). We refer to this area of thin separation between ice and bed as the extended grounding zone. The upward flexure is balanced by a slight downward flexure farther inland that causes previously lifted patches of ice to progressively regain contact with the bed (figure 4a). This flexural response causes the thin water layer to migrate seaward behind the main grounding line
$\sim$1 km (figure 4b). We refer to this area of thin separation between ice and bed as the extended grounding zone. The upward flexure is balanced by a slight downward flexure farther inland that causes previously lifted patches of ice to progressively regain contact with the bed (figure 4a). This flexural response causes the thin water layer to migrate seaward behind the main grounding line  $x_+$ while decaying in amplitude until low tide (figure 2c).
$x_+$ while decaying in amplitude until low tide (figure 2c).

Figure 4. (a,c) Vertical velocity  $u_z$ near the grounding line plotted on the displaced mesh during the falling and rising stages of the tidal cycle. The times are noted in figure 2(a). The instantaneous displacement
$u_z$ near the grounding line plotted on the displaced mesh during the falling and rising stages of the tidal cycle. The times are noted in figure 2(a). The instantaneous displacement  $\boldsymbol {u}\times \Delta t$ has been exaggerated by a factor of
$\boldsymbol {u}\times \Delta t$ has been exaggerated by a factor of  ${\sim }3\times 10^5$ for visualisation. The width and structure of the extended grounding zone are noted in (a). Minimum and maximum grounding-line positions are noted by black triangles. (b,d) Water-layer thickness
${\sim }3\times 10^5$ for visualisation. The width and structure of the extended grounding zone are noted in (a). Minimum and maximum grounding-line positions are noted by black triangles. (b,d) Water-layer thickness  $s-\beta -\tau$ during the falling and rising stages of the tidal cycle, where
$s-\beta -\tau$ during the falling and rising stages of the tidal cycle, where  $\tau$ is the boundary geometry tolerance parameter defined in § 3.4. (b) shows the
$\tau$ is the boundary geometry tolerance parameter defined in § 3.4. (b) shows the  $\sim$1 mm thick water layer that forms between
$\sim$1 mm thick water layer that forms between  $x_-$ and
$x_-$ and  $x_+$. Supplementary movies 2–4 available at https://doi.org/10.1017/jfm.2021.394 show the evolution of the water-layer thickness over the full simulation for a range of numerical parameters.
$x_+$. Supplementary movies 2–4 available at https://doi.org/10.1017/jfm.2021.394 show the evolution of the water-layer thickness over the full simulation for a range of numerical parameters.
We show that the extended grounding zone forms for a wide range of mesh spacings in supplementary movie 2 ( $\Delta x = 12.5$,
$\Delta x = 12.5$,  $50$ and 100 m), time-step sizes in supplementary movie 3 (
$50$ and 100 m), time-step sizes in supplementary movie 3 ( $\Delta t=1$,
$\Delta t=1$,  $2$ and 4 min) and boundary geometry tolerances in supplementary movie 4 (
$2$ and 4 min) and boundary geometry tolerances in supplementary movie 4 ( $\tau =10^{-2}$,
$\tau =10^{-2}$,  $10^{-3}$ and
$10^{-3}$ and  $10^{-4}\ \textrm {m}$). The width, maximum amplitude and migration speed of the water layer are insensitive to changes in these parameters. Therefore, the extended grounding zone is a robust feature of the solution. When the water layer collapses near low tide, differences between the solutions can occur on the sub-millimetre scale.
$10^{-4}\ \textrm {m}$). The width, maximum amplitude and migration speed of the water layer are insensitive to changes in these parameters. Therefore, the extended grounding zone is a robust feature of the solution. When the water layer collapses near low tide, differences between the solutions can occur on the sub-millimetre scale.
After low tide, the extended grounding zone is lost as ice is lifted off the bed by the rising sea (figures 2c, 3b). Only one grounding line exists as sea level rises because a downward flexure occurs inland of  $x_+$, balancing the strong upward flexure of the ice shelf (figure 4c,d). The grounding line migrates inland until high tide, when the cycle is completed. The extended grounding zone does not form at longer (e.g.weekly) oscillation periods because the flexural response is absent (supplementary movie 5).
$x_+$, balancing the strong upward flexure of the ice shelf (figure 4c,d). The grounding line migrates inland until high tide, when the cycle is completed. The extended grounding zone does not form at longer (e.g.weekly) oscillation periods because the flexural response is absent (supplementary movie 5).
4.2. Subglacial lake filling–draining cycles
Here, we illustrate grounding-line responses to subglacial-lake filling–draining cycles. Motivated by observations and modelling studies of sub-decadal cycles, we use a volume change rate  $\dot {\mathcal {V}}$ obtained from a smoothed sawtooth volume-change time series with a period of one year (Fowler Reference Fowler2009; Kingslake Reference Kingslake2015; Siegfried & Fricker Reference Siegfried and Fricker2018; Stubblefield et al. Reference Stubblefield, Creyts, Kingslake and Spiegelman2019). The volume change
$\dot {\mathcal {V}}$ obtained from a smoothed sawtooth volume-change time series with a period of one year (Fowler Reference Fowler2009; Kingslake Reference Kingslake2015; Siegfried & Fricker Reference Siegfried and Fricker2018; Stubblefield et al. Reference Stubblefield, Creyts, Kingslake and Spiegelman2019). The volume change  $\mathcal {V}$ is shown in figure 5(a). We assume that the subglacial lake exists in a topographic low point on the bed beneath an ice slab of length
$\mathcal {V}$ is shown in figure 5(a). We assume that the subglacial lake exists in a topographic low point on the bed beneath an ice slab of length  $L=10$ km. Therefore, we let the bed topography be a Gaussian
$L=10$ km. Therefore, we let the bed topography be a Gaussian
 \begin{equation} \beta(x) ={-} 10\exp\left({-}16\frac{x^2}{L^2}\right). \end{equation}
\begin{equation} \beta(x) ={-} 10\exp\left({-}16\frac{x^2}{L^2}\right). \end{equation}
We choose an initial lower surface given by  $s(x,0) = \max (\beta (x),-5\ \mathrm {m}),$ and a uniform initial upper-surface elevation of
$s(x,0) = \max (\beta (x),-5\ \mathrm {m}),$ and a uniform initial upper-surface elevation of  $h(x,0)\equiv 1$ km (figure 6a). We set the horizontal inflow and outflow speeds to
$h(x,0)\equiv 1$ km (figure 6a). We set the horizontal inflow and outflow speeds to  $u_0=0$ on
$u_0=0$ on  $\varGamma _D = \{|x|=L/2\}$ so that
$\varGamma _D = \{|x|=L/2\}$ so that  $\varGamma _N = \emptyset$ (figure 1). We choose a time-step size of
$\varGamma _N = \emptyset$ (figure 1). We choose a time-step size of  $\Delta t=5\times 10^{-4}$ yr.
$\Delta t=5\times 10^{-4}$ yr.

Figure 5. (a) Computed lake volume change  $\mathcal {V}/\mathcal {V}_0$ compared with the exact volume change
$\mathcal {V}/\mathcal {V}_0$ compared with the exact volume change  $\mathcal {V}_{true}/\mathcal {V}_0$, where
$\mathcal {V}_{true}/\mathcal {V}_0$, where  $\mathcal {V}_0$ is the initial lake volume. The black diamonds mark the times and relative water volumes associated with the free-surface plots in figure 6. (b) Change in mean values of
$\mathcal {V}_0$ is the initial lake volume. The black diamonds mark the times and relative water volumes associated with the free-surface plots in figure 6. (b) Change in mean values of  $h$ and
$h$ and  $s$ over the ice–water boundary (cf. figure 2a). The response of the upper surface is smaller in magnitude than that of the lower surface. (c) Motion of the grounding lines
$s$ over the ice–water boundary (cf. figure 2a). The response of the upper surface is smaller in magnitude than that of the lower surface. (c) Motion of the grounding lines  $x_-$ and
$x_-$ and  $x_+$ over time. (d) Plot of the deviation of the mean water pressure
$x_+$ over time. (d) Plot of the deviation of the mean water pressure  $\bar {p}_w$ from the mean cryostatic pressure
$\bar {p}_w$ from the mean cryostatic pressure  $p_o=\rho _i g(\bar {h}-\bar {s})$ over time. The line
$p_o=\rho _i g(\bar {h}-\bar {s})$ over time. The line  $\bar {p}_w=p_o$ is shown for reference.
$\bar {p}_w=p_o$ is shown for reference.

Figure 6. Plot of free-surface geometry over the course of one filling–draining cycle, with time increasing from (a–d). The reference upper-surface elevation is  $h_0=1$ km and the initial geometry is depicted by dashed black lines in (a). For visualisation, 99 % of the initial ice-surface elevation has been subtracted from
$h_0=1$ km and the initial geometry is depicted by dashed black lines in (a). For visualisation, 99 % of the initial ice-surface elevation has been subtracted from  $h$. The times and relative water volumes are noted in figure 5(a). The water volumes in (b,d) are the same. The colour scheme follows figure 1. The grounding-line positions
$h$. The times and relative water volumes are noted in figure 5(a). The water volumes in (b,d) are the same. The colour scheme follows figure 1. The grounding-line positions  $x_\pm$ are noted by black triangles.
$x_\pm$ are noted by black triangles.
The ice–air and ice–water surface-response time series mirror the sawtooth volume change (figure 5a,b). However, the upper-surface response is smaller in magnitude than the lower-surface response because it is distributed over a wider area. The grounding lines move inward and outward during the draining and filling stages, respectively (figure 5c). Both grounding lines migrate a total distance of  $\sim$1.9 km over the course of the cycle. We also plot the deviation of
$\sim$1.9 km over the course of the cycle. We also plot the deviation of  $\bar {p}_w$ from the mean cryostatic pressure
$\bar {p}_w$ from the mean cryostatic pressure  $p_o=\rho _i g (\bar {h}-\bar {s})$ over time (figure 5d). The difference
$p_o=\rho _i g (\bar {h}-\bar {s})$ over time (figure 5d). The difference  $\bar {p}_w-p_o$ is slightly positive during the filling stage as the subglacial water forces the ice upwards. During the draining stage, the cryostatic pressure exceeds the water pressure by up to
$\bar {p}_w-p_o$ is slightly positive during the filling stage as the subglacial water forces the ice upwards. During the draining stage, the cryostatic pressure exceeds the water pressure by up to  ${\sim }2\ \textrm {kPa}$ because the water is not fully supporting the weight of the ice.
${\sim }2\ \textrm {kPa}$ because the water is not fully supporting the weight of the ice.
We show the spatial pattern of elevation change and grounding-line migration over one filling–draining cycle in figure 6. The elevations of the grounding lines remain close to the mean elevation of the ice–water interface  $\bar {s}$ during lake lowstand and the draining stages (figure 6a,d). During the filling stage, the grounding lines move outward as the ice separates from the bed (figure 6b,c). The grounding-line elevations quickly surpass the mean elevation
$\bar {s}$ during lake lowstand and the draining stages (figure 6a,d). During the filling stage, the grounding lines move outward as the ice separates from the bed (figure 6b,c). The grounding-line elevations quickly surpass the mean elevation  $\bar {s}$, leaving only a thin gap between the ice and the bed initially (figure 6b). Over the time scale considered here, the lower surface deforms to the shape of the bed so that it records the lowest elevation experienced during the draining stage. At slower volume change rates, this crack-like geometry near the grounding lines does not develop because the lower surface can relax viscously (Appendix B.2). As before, we provide a movie of the complete simulation (supplementary movie 6).
$\bar {s}$, leaving only a thin gap between the ice and the bed initially (figure 6b). Over the time scale considered here, the lower surface deforms to the shape of the bed so that it records the lowest elevation experienced during the draining stage. At slower volume change rates, this crack-like geometry near the grounding lines does not develop because the lower surface can relax viscously (Appendix B.2). As before, we provide a movie of the complete simulation (supplementary movie 6).
5. Discussion
In the tidal problem, we described the formation of a thin water layer that extends the grounding zone farther inland during sea level fall. The extended grounding zone results from flexural bending of the ice, which occurs on short time scales in thin viscous sheets (Ribe Reference Ribe2001). Sayag & Worster (Reference Sayag and Worster2013) showed that tidal bending can generate oscillations in the hydraulic gradient near the grounding line, potentially providing a similar mechanism for the formation of isolated subglacial water bodies. Similarly, Warburton, Hewitt & Neufeld (Reference Warburton, Hewitt and Neufeld2020) explored how coupling between elastic bending, dynamic water pressure and subglacial drainage can influence tidal grounding-line migration. Determining the dynamic coupling between grounding-line migration and subglacial drainage at the ice–ocean interface remains a pertinent area for future work.
An advantage of our subglacial-lake model compared with previous work is that ice flow is directly linked to the volume change rate. Subglacial-lake volume change is controlled by the inflow and outflow of water through drainage pathways such as channels, canals, cavities and water sheets (Nye Reference Nye1976; Walder & Fowler Reference Walder and Fowler1994; Fowler Reference Fowler1999; Creyts & Schoof Reference Creyts and Schoof2009; Hewitt, Schoof & Werder Reference Hewitt, Schoof and Werder2012; Schoof, Hewitt & Werder Reference Schoof, Hewitt and Werder2012; Stubblefield et al. Reference Stubblefield, Creyts, Kingslake and Spiegelman2019). This formulation provides a natural coupling of ice flow to subglacial hydrology models because the volume change rate can be expressed as the net inflow or outflow of water from drainage elements that are connected to the lake. As the mean water pressure  $\bar {p}_w$ closely approximates the mean cryostatic pressure
$\bar {p}_w$ closely approximates the mean cryostatic pressure  $p_o$, the effective pressure is
$p_o$, the effective pressure is  $p_o-p_w=\rho _w g (s-\bar {s}) + O(1\ \mathrm {kPa})$ (figure 5d). This relation can serve as an effective pressure boundary condition in subglacial hydrology models, perhaps with a correction to account for underpressure during draining stages. We leave further exploration of the ice-flow response to lake volume change for future work since this probably depends on the choice of lateral boundary conditions, ice thickness and oscillation period.
$p_o-p_w=\rho _w g (s-\bar {s}) + O(1\ \mathrm {kPa})$ (figure 5d). This relation can serve as an effective pressure boundary condition in subglacial hydrology models, perhaps with a correction to account for underpressure during draining stages. We leave further exploration of the ice-flow response to lake volume change for future work since this probably depends on the choice of lateral boundary conditions, ice thickness and oscillation period.
While approximations to the Stokes equations have dominated ice-sheet modelling for decades, full-Stokes ice-sheet models have become more common in prognostic and diagnostic studies (Durand et al. Reference Durand, Gagliardini, Zwinger, Le Meur and Hindmarsh2009b; Zhang et al. Reference Zhang, Ju, Gunzburger, Ringler and Price2011; Petra et al. Reference Petra, Zhu, Stadler, Hughes and Ghattas2012; Seddik et al. Reference Seddik, Greve, Zwinger, Gillet-Chaulet and Gagliardini2012; Seroussi et al. Reference Seroussi, Dhia, Morlighem, Larour, Rignot and Aubry2012; Isaac, Stadler & Ghattas Reference Isaac, Stadler and Ghattas2015; Gagliardini et al. Reference Gagliardini, Brondex, Gillet-Chaulet, Tavard, Peyaud and DURAND2016; Zhu et al. Reference Zhu, Petra, Stadler, Isaac, Hughes and Ghattas2016; Helanow & Ahlkrona Reference Helanow and Ahlkrona2018). In contrast to existing approaches to full-Stokes grounding-line dynamics, we resolve the contact conditions directly during solution of the variational problem (Durand et al. Reference Durand, Gagliardini, De Fleurian, Zwinger and Le Meur2009a; Favier et al. Reference Favier, Gagliardini, Durand and Zwinger2012; Cheng et al. Reference Cheng, Lötstedt and von Sydow2020). Not only does this result in a simple numerical method, but also the penalty-method solution is known to converge to the solution of the underlying variational inequality problem. The penalty method (3.21) can be implemented in existing finite-element marine ice-sheet models by simply (i) extending the water pressure weak form inland of the grounding line and (ii) adding the penalty weak form. Moreover, the method does not introduce additional numerical constraints on stability or resolution beyond those already necessary for time-accurate free-surface Stokes solutions.
The penalty method developed herein is perhaps the simplest variational treatment of the contact conditions. Alternative methods that possess improved convergence properties probably exist. Defining an effective stress  $\sigma _e = \sigma _n-p_w$, the contact conditions (2.27) are equivalent to the single equation
$\sigma _e = \sigma _n-p_w$, the contact conditions (2.27) are equivalent to the single equation
 \begin{equation} \sigma_e = \max (0,\sigma_e + {\varepsilon}^{{-}1} u_n), \end{equation}
\begin{equation} \sigma_e = \max (0,\sigma_e + {\varepsilon}^{{-}1} u_n), \end{equation}
for arbitrary  $\varepsilon >0$. The penalty method can be derived from (5.1) by dropping the
$\varepsilon >0$. The penalty method can be derived from (5.1) by dropping the  $\sigma _e$ inside the max function and carrying through a derivation similar to § 3.1, but testing against functions
$\sigma _e$ inside the max function and carrying through a derivation similar to § 3.1, but testing against functions  $\boldsymbol {v}\in V_D$. Advanced methods that instead solve (5.1) iteratively have been developed for the classical Signorini problem (Stadler Reference Stadler2007; Ito & Kunisch Reference Ito and Kunisch2008).
$\boldsymbol {v}\in V_D$. Advanced methods that instead solve (5.1) iteratively have been developed for the classical Signorini problem (Stadler Reference Stadler2007; Ito & Kunisch Reference Ito and Kunisch2008).
6. Conclusions
Here, we have introduced variational formulations of contact problems for marine ice sheets and subglacial lakes. These models take the form of variational inequalities that are analogous to the Signorini problem from elasticity. The formulations can be extended naturally in several pertinent directions since the contact conditions are independent of constitutive relations on the stress and water pressure. For example, the method can be extended to include (i) a dynamic water pressure near the grounding line if ice flow is coupled to a subglacial hydrology model, (ii) an elastic or viscoelastic ice rheology or (iii) complex bed geometry. Therefore, the contact formulations developed herein are widely applicable to future work on the interaction between grounding-line migration, subglacial hydrological systems, climatic forcings and ice-sheet evolution.
Supplementary movies
Supplementary movies are available at https://doi.org/10.1017/jfm.2021.394.
Acknowledgements
We thank G. Stadler (New York University), J. Kingslake (Columbia University) and M. Siegfried (Colorado School of Mines) for discussions about this work. We are grateful for suggestions from three anonymous reviewers that improved the quality and clarity of the article.
Funding
A.G.S. was supported by a National Science Foundation Graduate Research Fellowship. A.G.S. thanks E. Bueler (University of Alaska) for introduction to free-surface Stokes problems during University of Alaska's 2018 International Summer School in Glaciology. T.T.C. was supported by the Vetlesen Foundation and NSF grant OPP-1643970.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Well-posedness lemmas
A.1. Function space setting
For  $\hat {r}\geqslant 1$ and a set
$\hat {r}\geqslant 1$ and a set  $O$, we define the norms
$O$, we define the norms  $\| \varPhi \|_{L^{\hat {r}}(O)} = (\int _O |\varPhi |^{\hat {r}})^{{1}/{\hat {r}}}$, where
$\| \varPhi \|_{L^{\hat {r}}(O)} = (\int _O |\varPhi |^{\hat {r}})^{{1}/{\hat {r}}}$, where  $|\cdot |$ denotes the absolute value of a scalar, Euclidean norm of a vector, or Frobenius norm of a tensor. We define the function space for velocity
$|\cdot |$ denotes the absolute value of a scalar, Euclidean norm of a vector, or Frobenius norm of a tensor. We define the function space for velocity  $V$ to be the completion of
$V$ to be the completion of  $C^1(\varOmega )$ with respect to the norm
$C^1(\varOmega )$ with respect to the norm
 \begin{equation} \|\boldsymbol{v}\|_V = \|\boldsymbol{v}\|_{W^{1,r}(\varOmega)} + \|v_n\|_{L^2(\varGamma_s)}. \end{equation}
\begin{equation} \|\boldsymbol{v}\|_V = \|\boldsymbol{v}\|_{W^{1,r}(\varOmega)} + \|v_n\|_{L^2(\varGamma_s)}. \end{equation}
The Sobolev norm  $\|\boldsymbol {v}\|_{W^{1,r}(\varOmega )} = (\| \boldsymbol {v} \|_{L^r(\varOmega )}^r + \| \boldsymbol {\nabla } \boldsymbol {v} \|_{L^r(\varOmega )}^r)^{1/r}$ in (A1) ensures that the weak forms of the flow law (2.9) and sliding law (2.25) are well defined (Jouvet & Rappaz Reference Jouvet and Rappaz2011; Chen et al. Reference Chen, Gunzburger and Perego2013). The additional
$\|\boldsymbol {v}\|_{W^{1,r}(\varOmega )} = (\| \boldsymbol {v} \|_{L^r(\varOmega )}^r + \| \boldsymbol {\nabla } \boldsymbol {v} \|_{L^r(\varOmega )}^r)^{1/r}$ in (A1) ensures that the weak forms of the flow law (2.9) and sliding law (2.25) are well defined (Jouvet & Rappaz Reference Jouvet and Rappaz2011; Chen et al. Reference Chen, Gunzburger and Perego2013). The additional  $L^2$ norm over
$L^2$ norm over  $\varGamma _s$ in (A1) ensures that the weak forms of the water pressures (2.14) and (2.17) are well-defined. A similar setting arises when using a linear sliding law (Isaac et al. Reference Isaac, Stadler and Ghattas2015). We let
$\varGamma _s$ in (A1) ensures that the weak forms of the water pressures (2.14) and (2.17) are well-defined. A similar setting arises when using a linear sliding law (Isaac et al. Reference Isaac, Stadler and Ghattas2015). We let  $Q=L^{r'}(\varOmega )$ be the function space for the ice pressure, where
$Q=L^{r'}(\varOmega )$ be the function space for the ice pressure, where  $r'=r/(r-1)$ is the Hölder conjugate of
$r'=r/(r-1)$ is the Hölder conjugate of  $r$.
$r$.
A.2. Properties of  $K_\star$ and $\mathcal {J}$
$K_\star$ and $\mathcal {J}$


The set  $K$ is closed and convex (Kikuchi & Oden Reference Kikuchi and Oden1988, cf. Theorem 5.7). We let
$K$ is closed and convex (Kikuchi & Oden Reference Kikuchi and Oden1988, cf. Theorem 5.7). We let  $\{\boldsymbol {v}_k\}\subset K_\star$ with
$\{\boldsymbol {v}_k\}\subset K_\star$ with  $\boldsymbol {v}_k\to \boldsymbol {v}\in K$ strongly as
$\boldsymbol {v}_k\to \boldsymbol {v}\in K$ strongly as  $k\to \infty$. We define
$k\to \infty$. We define  $v_{k,n} = \boldsymbol {v}_k\boldsymbol {\cdot } \boldsymbol {n}|_{\partial \varOmega }$. Using Hölder's inequality and the local estimate
$v_{k,n} = \boldsymbol {v}_k\boldsymbol {\cdot } \boldsymbol {n}|_{\partial \varOmega }$. Using Hölder's inequality and the local estimate  $|\boldsymbol {\nabla }\boldsymbol {\cdot }\boldsymbol {u}|\leqslant \sqrt {2} | \boldsymbol {\nabla } \boldsymbol {u} |$, we obtain
$|\boldsymbol {\nabla }\boldsymbol {\cdot }\boldsymbol {u}|\leqslant \sqrt {2} | \boldsymbol {\nabla } \boldsymbol {u} |$, we obtain
 \begin{align} |q_w\dot{\mathcal{V}} - b_\varOmega(q,\boldsymbol{v}) - b_\varGamma(q_w,\boldsymbol{v})| &= |b_\varOmega(q,\boldsymbol{v}_k-\boldsymbol{v}) + b_\varGamma(q_w,\boldsymbol{v}_k -\boldsymbol{v})| \end{align}
\begin{align} |q_w\dot{\mathcal{V}} - b_\varOmega(q,\boldsymbol{v}) - b_\varGamma(q_w,\boldsymbol{v})| &= |b_\varOmega(q,\boldsymbol{v}_k-\boldsymbol{v}) + b_\varGamma(q_w,\boldsymbol{v}_k -\boldsymbol{v})| \end{align} \begin{align} &\leqslant \sqrt{2}\|q\|_Q \|\boldsymbol{v}_k-\boldsymbol{v} \|_{W^{1,r}(\varOmega)} + |q_w||\varGamma_s|^{\frac{1}{2}}\|{v}_{k,n}-{v}_n\|_{L^2(\varGamma_s)} \end{align}
\begin{align} &\leqslant \sqrt{2}\|q\|_Q \|\boldsymbol{v}_k-\boldsymbol{v} \|_{W^{1,r}(\varOmega)} + |q_w||\varGamma_s|^{\frac{1}{2}}\|{v}_{k,n}-{v}_n\|_{L^2(\varGamma_s)} \end{align} \begin{align} &\leqslant \max(\sqrt{2}\|q\|_Q,|q_w||\varGamma_s|^{\frac{1}{2}}) \times \|\boldsymbol{v}_k-\boldsymbol{v} \|_V \to 0 \end{align}
\begin{align} &\leqslant \max(\sqrt{2}\|q\|_Q,|q_w||\varGamma_s|^{\frac{1}{2}}) \times \|\boldsymbol{v}_k-\boldsymbol{v} \|_V \to 0 \end{align}
as  $k\to \infty$, for all
$k\to \infty$, for all  $(q,q_w)\in Q\times \mathbb {R}$. Therefore,
$(q,q_w)\in Q\times \mathbb {R}$. Therefore,  $\boldsymbol {v}\in K_\star$ and
$\boldsymbol {v}\in K_\star$ and  $K_\star$ is closed.
$K_\star$ is closed.
Next, we show that  $\mathcal {J}$ is continuous and coercive with respect to the norm
$\mathcal {J}$ is continuous and coercive with respect to the norm  $\|\boldsymbol {v} \|_V = \|\boldsymbol {v} \|_{W^{1,r}(\varOmega )} + \|v_n \|_{L^2(\varGamma _s)}$. To leverage previous results, we define
$\|\boldsymbol {v} \|_V = \|\boldsymbol {v} \|_{W^{1,r}(\varOmega )} + \|v_n \|_{L^2(\varGamma _s)}$. To leverage previous results, we define  $\hat {\mathcal {J}}(\boldsymbol {v}) = {\mathcal {J}}(\boldsymbol {v})- \rho _w g\int _{\varGamma _s} \gamma _1 v_n^2 + (\gamma _2-s) v_n \;\mathrm {d}\boldsymbol {s}$. Continuity of
$\hat {\mathcal {J}}(\boldsymbol {v}) = {\mathcal {J}}(\boldsymbol {v})- \rho _w g\int _{\varGamma _s} \gamma _1 v_n^2 + (\gamma _2-s) v_n \;\mathrm {d}\boldsymbol {s}$. Continuity of  $\mathcal {J}$ follows from continuity of
$\mathcal {J}$ follows from continuity of  $\hat {\mathcal {J}}$ with respect to
$\hat {\mathcal {J}}$ with respect to  $\|\cdot \|_{W^{1,r}(\varOmega )}$ and continuity of
$\|\cdot \|_{W^{1,r}(\varOmega )}$ and continuity of  $\int _{\varGamma _s} \gamma _1 v_n^2 + (\gamma _2-s) v_n \,\mathrm {d}\boldsymbol {s}$ with respect to
$\int _{\varGamma _s} \gamma _1 v_n^2 + (\gamma _2-s) v_n \,\mathrm {d}\boldsymbol {s}$ with respect to  $\|\cdot \|_{L^2(\varGamma _s)}$ (Chen et al. Reference Chen, Gunzburger and Perego2013, Lemmas 9 and 12). Coercivity of
$\|\cdot \|_{L^2(\varGamma _s)}$ (Chen et al. Reference Chen, Gunzburger and Perego2013, Lemmas 9 and 12). Coercivity of  $\hat {\mathcal {J}}$ on
$\hat {\mathcal {J}}$ on  $W^{1,r}(\varOmega )$ is guaranteed by
$W^{1,r}(\varOmega )$ is guaranteed by
 \begin{equation} \hat{\mathcal{J}}(\boldsymbol{v}) \geqslant c_1\|\boldsymbol{v}\|_{W^{1,r}(\varOmega)} - c_2 \end{equation}
\begin{equation} \hat{\mathcal{J}}(\boldsymbol{v}) \geqslant c_1\|\boldsymbol{v}\|_{W^{1,r}(\varOmega)} - c_2 \end{equation}
for some positive constants  $c_1$ and
$c_1$ and  $c_2$, provided that
$c_2$, provided that  $\|\boldsymbol {v}\|_{W^{1,r}(\varOmega )}$ is sufficiently large and
$\|\boldsymbol {v}\|_{W^{1,r}(\varOmega )}$ is sufficiently large and  $\varGamma _b\neq \emptyset$ (Chen et al. Reference Chen, Gunzburger and Perego2013, Lemma 13). We use Hölder's inequality to estimate
$\varGamma _b\neq \emptyset$ (Chen et al. Reference Chen, Gunzburger and Perego2013, Lemma 13). We use Hölder's inequality to estimate
 \begin{equation} \rho_w g\int_{\varGamma_s} \gamma_1 v_n^2 + (\gamma_2-s) v_n \,\mathrm{d}\boldsymbol{s} \geqslant c_3\| v_n\|_{L^2(\varGamma_s)}^2 - c_4\| v_n \|_{L^2(\varGamma_s)},\end{equation}
\begin{equation} \rho_w g\int_{\varGamma_s} \gamma_1 v_n^2 + (\gamma_2-s) v_n \,\mathrm{d}\boldsymbol{s} \geqslant c_3\| v_n\|_{L^2(\varGamma_s)}^2 - c_4\| v_n \|_{L^2(\varGamma_s)},\end{equation}
where  $c_3 = \rho _w g \gamma _1$ and
$c_3 = \rho _w g \gamma _1$ and  $c_4 = \rho _w g\|\gamma _2-s\|_{L^2(\varGamma _s)}$. Combining (A5) and (A6), we obtain
$c_4 = \rho _w g\|\gamma _2-s\|_{L^2(\varGamma _s)}$. Combining (A5) and (A6), we obtain
 \begin{equation} \mathcal{J}(\boldsymbol{v})\geqslant c_1\|\boldsymbol{v}\|_{W^{1,r}(\varOmega)} + c_3\| v_n\|_{L^2(\varGamma_s)}^2 - c_4\| v_n \|_{L^2(\varGamma_s)} - c_2, \end{equation}
\begin{equation} \mathcal{J}(\boldsymbol{v})\geqslant c_1\|\boldsymbol{v}\|_{W^{1,r}(\varOmega)} + c_3\| v_n\|_{L^2(\varGamma_s)}^2 - c_4\| v_n \|_{L^2(\varGamma_s)} - c_2, \end{equation}
which shows that  $\mathcal {J}(\boldsymbol {v})\to \infty$ when
$\mathcal {J}(\boldsymbol {v})\to \infty$ when  $\|\boldsymbol {v}\|_V \to \infty$.
$\|\boldsymbol {v}\|_V \to \infty$.
A.3. Existence and uniqueness of the pressures
Here, we prove the existence and the uniqueness of the ice pressure  $p$ and mean water pressure
$p$ and mean water pressure  $\bar {p}_w$ in the mixed formulation (3.12) given a solution
$\bar {p}_w$ in the mixed formulation (3.12) given a solution  $\boldsymbol {u}\in K_\star$ to the reduced formulation (3.14). In the following, we show that the problem involves test functions belonging to
$\boldsymbol {u}\in K_\star$ to the reduced formulation (3.14). In the following, we show that the problem involves test functions belonging to
 \begin{equation} V_0 = \{\boldsymbol{v}\in V: \ \boldsymbol{v} = \boldsymbol{0} \ \mathrm{on} \ \varGamma_b\cup \varGamma_{D} \}. \end{equation}
\begin{equation} V_0 = \{\boldsymbol{v}\in V: \ \boldsymbol{v} = \boldsymbol{0} \ \mathrm{on} \ \varGamma_b\cup \varGamma_{D} \}. \end{equation}
Following Isaac et al. (Reference Isaac, Stadler and Ghattas2015), we define the subspace  $\tilde {V}_0 = \{\boldsymbol {v}\in V_0: v_n|_{\varGamma _s}=0\}$ where the norm reduces to
$\tilde {V}_0 = \{\boldsymbol {v}\in V_0: v_n|_{\varGamma _s}=0\}$ where the norm reduces to  $\|\boldsymbol {v}\|_V = \|\boldsymbol {v}\|_{W^{1,r}(\varOmega )}$. Using the inf–sup condition (Lemma 3.9) from Jouvet & Rappaz (Reference Jouvet and Rappaz2011) on
$\|\boldsymbol {v}\|_V = \|\boldsymbol {v}\|_{W^{1,r}(\varOmega )}$. Using the inf–sup condition (Lemma 3.9) from Jouvet & Rappaz (Reference Jouvet and Rappaz2011) on  $\tilde {V}_0$, we obtain
$\tilde {V}_0$, we obtain
 \begin{equation} \sup_{\boldsymbol{u}\in V_0} \frac{b_\varOmega(q,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant \sup_{\boldsymbol{u}\in \tilde{V}_0} \frac{b_\varOmega(q,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant c_6\|q\|_Q\end{equation}
\begin{equation} \sup_{\boldsymbol{u}\in V_0} \frac{b_\varOmega(q,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant \sup_{\boldsymbol{u}\in \tilde{V}_0} \frac{b_\varOmega(q,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant c_6\|q\|_Q\end{equation}
for all  $q\in Q$, where
$q\in Q$, where  $c_6$ is a positive constant. We choose an arbitrary
$c_6$ is a positive constant. We choose an arbitrary  $\boldsymbol {\xi }\in V_0$ such that
$\boldsymbol {\xi }\in V_0$ such that  $\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {\xi }=0$,
$\boldsymbol {\nabla }\boldsymbol {\cdot } \boldsymbol {\xi }=0$,  $\xi _n\geqslant 0$ on
$\xi _n\geqslant 0$ on  $\varGamma _w$ and
$\varGamma _w$ and  $c_7 = {\| \xi _n \|_{L^1(\varGamma _s)}}/{\|\boldsymbol {\xi }\|_V}>0$. For example,
$c_7 = {\| \xi _n \|_{L^1(\varGamma _s)}}/{\|\boldsymbol {\xi }\|_V}>0$. For example,  $\boldsymbol {\xi }$ can be obtained as the solution of an auxiliary Stokes problem posed over
$\boldsymbol {\xi }$ can be obtained as the solution of an auxiliary Stokes problem posed over  $V_0$, with
$V_0$, with  $\xi _n$ prescribed on
$\xi _n$ prescribed on  $\varGamma _w$. The constraint operator
$\varGamma _w$. The constraint operator  $b_\varGamma$ then satisfies the inf–sup condition
$b_\varGamma$ then satisfies the inf–sup condition
 \begin{equation} \sup_{{\boldsymbol{u}\in V_0, \, \boldsymbol{\nabla\cdot u}=0}} \frac{b_\varGamma(q_w,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant c_7 |q_w| \end{equation}
\begin{equation} \sup_{{\boldsymbol{u}\in V_0, \, \boldsymbol{\nabla\cdot u}=0}} \frac{b_\varGamma(q_w,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant c_7 |q_w| \end{equation}
for all  $q_w\in \mathbb {R}$. We define the combined volume-change and incompressibility constraint operator
$q_w\in \mathbb {R}$. We define the combined volume-change and incompressibility constraint operator
 \begin{equation} b(q_w,q,\boldsymbol{u}) = b_\varOmega (q,\boldsymbol{u}) + b_\varGamma (q_w,\boldsymbol{u}). \end{equation}
\begin{equation} b(q_w,q,\boldsymbol{u}) = b_\varOmega (q,\boldsymbol{u}) + b_\varGamma (q_w,\boldsymbol{u}). \end{equation}The inf–sup conditions (A9) and (A10) imply that
 \begin{equation} \sup_{\boldsymbol{u}\in V_0} \frac{b(q_w,q,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant c_8 (\|q\|_Q + |q_w|) \end{equation}
\begin{equation} \sup_{\boldsymbol{u}\in V_0} \frac{b(q_w,q,\boldsymbol{u})}{\|\boldsymbol{u}\|_V} \geqslant c_8 (\|q\|_Q + |q_w|) \end{equation}
for some  $c_8>0$ (Howell & Walkington Reference Howell and Walkington2011, Theorem 3.1).
$c_8>0$ (Howell & Walkington Reference Howell and Walkington2011, Theorem 3.1).
In the following, we show that any  $\boldsymbol {v}\in K$ can be expressed as
$\boldsymbol {v}\in K$ can be expressed as
 \begin{equation} \boldsymbol{v}=\tilde{\boldsymbol{v}}+\boldsymbol{\varphi} \quad \mathrm{for} \ \tilde{\boldsymbol{v}}\in K_\star,\quad \boldsymbol{\varphi}\in V_0. \end{equation}
\begin{equation} \boldsymbol{v}=\tilde{\boldsymbol{v}}+\boldsymbol{\varphi} \quad \mathrm{for} \ \tilde{\boldsymbol{v}}\in K_\star,\quad \boldsymbol{\varphi}\in V_0. \end{equation}We substitute the decomposition (A13) into (3.12) to obtain
 \begin{equation} \mathcal{F}(\boldsymbol{u},\tilde{\boldsymbol{v}}-\boldsymbol{u}) + \mathcal{P}_w^l (\boldsymbol{u},\tilde{\boldsymbol{v}}-\boldsymbol{u}) + \mathcal{F}(\boldsymbol{u},\boldsymbol{\varphi}) + \mathcal{P}_w^l (\boldsymbol{u},\boldsymbol{\varphi}) + b(\bar{p}_w,p,\boldsymbol{\varphi}) \geqslant 0. \end{equation}
\begin{equation} \mathcal{F}(\boldsymbol{u},\tilde{\boldsymbol{v}}-\boldsymbol{u}) + \mathcal{P}_w^l (\boldsymbol{u},\tilde{\boldsymbol{v}}-\boldsymbol{u}) + \mathcal{F}(\boldsymbol{u},\boldsymbol{\varphi}) + \mathcal{P}_w^l (\boldsymbol{u},\boldsymbol{\varphi}) + b(\bar{p}_w,p,\boldsymbol{\varphi}) \geqslant 0. \end{equation}
As we found a unique  $\boldsymbol {u}\in K_\star$ satisfying (3.14) for all
$\boldsymbol {u}\in K_\star$ satisfying (3.14) for all  $\tilde {\boldsymbol {v}}\in K_\star$, the problem reduces to finding
$\tilde {\boldsymbol {v}}\in K_\star$, the problem reduces to finding  $(p,\bar {p}_w)\in Q\times \mathbb {R}$ such that
$(p,\bar {p}_w)\in Q\times \mathbb {R}$ such that
 \begin{equation} b(\bar{p}_w,p,\boldsymbol{\varphi}) ={-}\mathcal{F}(\boldsymbol{u},\boldsymbol{\varphi}) - \mathcal{P}_w^l (\boldsymbol{u},\boldsymbol{\varphi}) \end{equation}
\begin{equation} b(\bar{p}_w,p,\boldsymbol{\varphi}) ={-}\mathcal{F}(\boldsymbol{u},\boldsymbol{\varphi}) - \mathcal{P}_w^l (\boldsymbol{u},\boldsymbol{\varphi}) \end{equation}
for all  $\boldsymbol {\varphi }\in V_0$. We define the kernel of
$\boldsymbol {\varphi }\in V_0$. We define the kernel of  $b$ over
$b$ over  $V_0$ by
$V_0$ by  $\mathrm {ker}(b)=\{\boldsymbol {\varphi }\in V_0:\ b(q_w,q,\boldsymbol {\varphi })=0\ \mathrm {for}\ \mathrm {all}\ (q,q_w)\in Q\times \mathbb {R}\}$. Setting
$\mathrm {ker}(b)=\{\boldsymbol {\varphi }\in V_0:\ b(q_w,q,\boldsymbol {\varphi })=0\ \mathrm {for}\ \mathrm {all}\ (q,q_w)\in Q\times \mathbb {R}\}$. Setting  $\boldsymbol {v}=\boldsymbol {u}\pm \boldsymbol {\varphi }_0$ for
$\boldsymbol {v}=\boldsymbol {u}\pm \boldsymbol {\varphi }_0$ for  $\boldsymbol {\varphi }_0\in \mathrm {ker}(b)$ in (3.14), we find that
$\boldsymbol {\varphi }_0\in \mathrm {ker}(b)$ in (3.14), we find that
 \begin{equation} \mathcal{F}(\boldsymbol{u},\boldsymbol{\varphi}_0) + \mathcal{P}_w^l (\boldsymbol{u},\boldsymbol{\varphi}_0) = 0 \end{equation}
\begin{equation} \mathcal{F}(\boldsymbol{u},\boldsymbol{\varphi}_0) + \mathcal{P}_w^l (\boldsymbol{u},\boldsymbol{\varphi}_0) = 0 \end{equation}
for all  $\boldsymbol {\varphi }_0\in \mathrm {ker}(b)$. As both sides of (A15) vanish for
$\boldsymbol {\varphi }_0\in \mathrm {ker}(b)$. As both sides of (A15) vanish for  $\boldsymbol {\varphi }_0\in \mathrm {ker}(b)$, we resort to the quotient space
$\boldsymbol {\varphi }_0\in \mathrm {ker}(b)$, we resort to the quotient space  $V_0/\mathrm {ker}(b)$. Hölder's inequality and (A16) show that
$V_0/\mathrm {ker}(b)$. Hölder's inequality and (A16) show that  $\mathcal {F}(\boldsymbol {u},\cdot ) + \mathcal {P}_w^l (\boldsymbol {u},\cdot )$ is a bounded linear functional over
$\mathcal {F}(\boldsymbol {u},\cdot ) + \mathcal {P}_w^l (\boldsymbol {u},\cdot )$ is a bounded linear functional over  $V_0/\mathrm {ker}(b)$ (Conway Reference Conway2007, Theorem 10.2). Therefore, the inf–sup condition (A12) and generalised Lax–Milgram theorem guarantee that a unique solution
$V_0/\mathrm {ker}(b)$ (Conway Reference Conway2007, Theorem 10.2). Therefore, the inf–sup condition (A12) and generalised Lax–Milgram theorem guarantee that a unique solution  $(p,\bar {p}_w)\in Q\times \mathbb {R}$ to (A15) exists (Howell & Walkington Reference Howell and Walkington2011, Theorem 2.1).
$(p,\bar {p}_w)\in Q\times \mathbb {R}$ to (A15) exists (Howell & Walkington Reference Howell and Walkington2011, Theorem 2.1).
Now we show that the vector decomposition (A13) holds. We denote the subset of admissible velocity fields that obey the volume change constraint by  $K_\circ = \{\boldsymbol {v}\in K:\ -\int _{\varGamma _s} v_n\, \mathrm {d}\boldsymbol {s} = \dot {\mathcal {V}} \}$. Using Lemma 3.3 from Amrouche & Girault (Reference Amrouche and Girault1994), we can write any
$K_\circ = \{\boldsymbol {v}\in K:\ -\int _{\varGamma _s} v_n\, \mathrm {d}\boldsymbol {s} = \dot {\mathcal {V}} \}$. Using Lemma 3.3 from Amrouche & Girault (Reference Amrouche and Girault1994), we can write any  $\boldsymbol {v}_\circ \in K_\circ$ as
$\boldsymbol {v}_\circ \in K_\circ$ as  $\boldsymbol {v}_\circ = \tilde {\boldsymbol {v}} + \boldsymbol {\psi }$, where
$\boldsymbol {v}_\circ = \tilde {\boldsymbol {v}} + \boldsymbol {\psi }$, where  $\tilde {\boldsymbol {v}}\in K_\star$ and
$\tilde {\boldsymbol {v}}\in K_\star$ and  $\boldsymbol {\psi }\in V$ with
$\boldsymbol {\psi }\in V$ with  $\boldsymbol {\psi }=\boldsymbol {0}$ on
$\boldsymbol {\psi }=\boldsymbol {0}$ on  $\varGamma _s \cup \varGamma _{D}$ (Chen et al. Reference Chen, Gunzburger and Perego2013, cf. § 4). We choose an arbitrary
$\varGamma _s \cup \varGamma _{D}$ (Chen et al. Reference Chen, Gunzburger and Perego2013, cf. § 4). We choose an arbitrary  ${\boldsymbol {\xi }}'\in V_0$ satisfying
${\boldsymbol {\xi }}'\in V_0$ satisfying  $\int _{\varGamma _w} {\xi }_n' \,\mathrm {d}\boldsymbol {s}\neq 0$. Then, for any
$\int _{\varGamma _w} {\xi }_n' \,\mathrm {d}\boldsymbol {s}\neq 0$. Then, for any  $\boldsymbol {v}\in K$ we have that
$\boldsymbol {v}\in K$ we have that  $\boldsymbol {v}_\circ = \boldsymbol {v} -\lambda \boldsymbol {\xi }'$ is in
$\boldsymbol {v}_\circ = \boldsymbol {v} -\lambda \boldsymbol {\xi }'$ is in  $K_\circ$, where
$K_\circ$, where  $\lambda = (\dot {\mathcal {V}}+\int _{\varGamma _s} v_n\,\mathrm {d}\boldsymbol {s})/\int _{\varGamma _w} {\xi _n'}\,\mathrm {d}\boldsymbol {s}$. The decomposition (A13) then follows with
$\lambda = (\dot {\mathcal {V}}+\int _{\varGamma _s} v_n\,\mathrm {d}\boldsymbol {s})/\int _{\varGamma _w} {\xi _n'}\,\mathrm {d}\boldsymbol {s}$. The decomposition (A13) then follows with  $\boldsymbol {\varphi } = \boldsymbol {\psi } + \lambda {\boldsymbol {\xi }}'$.
$\boldsymbol {\varphi } = \boldsymbol {\psi } + \lambda {\boldsymbol {\xi }}'$.
Appendix B. Numerical tests
B.1. Convergence tests
Here, we test the convergence of the numerical method with decreasing penalty parameter  $\varepsilon$, time-step size
$\varepsilon$, time-step size  $\Delta t$ and element width at the lower boundary
$\Delta t$ and element width at the lower boundary  $\Delta x$. We assume the same subglacial-lake set-up as in § 4.2. We choose a final time of one year, corresponding to a single filling–draining cycle. First, we study convergence with decreasing
$\Delta x$. We assume the same subglacial-lake set-up as in § 4.2. We choose a final time of one year, corresponding to a single filling–draining cycle. First, we study convergence with decreasing  $\varepsilon$ by comparing the exact volume change
$\varepsilon$ by comparing the exact volume change  $\mathcal {V}_\mathrm {true}(t)$ with the computed volume change
$\mathcal {V}_\mathrm {true}(t)$ with the computed volume change  $\mathcal {V}(t)$. We observe that the relative error
$\mathcal {V}(t)$. We observe that the relative error  $\|\mathcal {V}_{true} - \mathcal {V}\|_2/\|\mathcal {V}_{true}\|_2 < 10^{-2}$ when
$\|\mathcal {V}_{true} - \mathcal {V}\|_2/\|\mathcal {V}_{true}\|_2 < 10^{-2}$ when  $\varepsilon \lesssim 10^{-13}$ (figure 7a). The average value of the penalty functional
$\varepsilon \lesssim 10^{-13}$ (figure 7a). The average value of the penalty functional  $\varPi (\boldsymbol {u})$ over the simulation time is more than an order of magnitude smaller than
$\varPi (\boldsymbol {u})$ over the simulation time is more than an order of magnitude smaller than  $\varepsilon$ when
$\varepsilon$ when  $\varepsilon \lesssim 10^{-12}$ (figure 7b).
$\varepsilon \lesssim 10^{-12}$ (figure 7b).

Figure 7. (a) Convergence of volume change  $\mathcal {V}(t)$ towards the exact value
$\mathcal {V}(t)$ towards the exact value  $\mathcal {V}_{true}(t)$ with decreasing penalty parameter
$\mathcal {V}_{true}(t)$ with decreasing penalty parameter  $\varepsilon$. (b) Maximum, minimum and average values of the penalty functional over the simulation time, showing that
$\varepsilon$. (b) Maximum, minimum and average values of the penalty functional over the simulation time, showing that  $\varPi (\boldsymbol {u}) \to 0$ faster than
$\varPi (\boldsymbol {u}) \to 0$ faster than  $\varepsilon \to 0$. The time-step size and element width at the lower boundary are
$\varepsilon \to 0$. The time-step size and element width at the lower boundary are  $\Delta t=1/2000$ yr and
$\Delta t=1/2000$ yr and  $\Delta x=12.5\ \textrm {m}$, respectively.
$\Delta x=12.5\ \textrm {m}$, respectively.
We define the CFL number  $\kappa = x_g'\Delta t/\Delta x$, where
$\kappa = x_g'\Delta t/\Delta x$, where  $x_g'$ is the maximum grounding-line speed associated with the fine-resolution simulation (
$x_g'$ is the maximum grounding-line speed associated with the fine-resolution simulation ( $\Delta x = 12.5$ m and
$\Delta x = 12.5$ m and  $\Delta t=1/2000$ yr). As
$\Delta t=1/2000$ yr). As  $\Delta x$ decreases, we observe that
$\Delta x$ decreases, we observe that  $\|\mathcal {V}_{true} - \mathcal {V}\|_2/\|\mathcal {V}_{true}\|_2$ converges approximately linearly (figure 8a). Convergence with decreasing
$\|\mathcal {V}_{true} - \mathcal {V}\|_2/\|\mathcal {V}_{true}\|_2$ converges approximately linearly (figure 8a). Convergence with decreasing  $\Delta t$ (decreasing
$\Delta t$ (decreasing  $\kappa$) is also approximately linear. To study convergence of the grounding-line position
$\kappa$) is also approximately linear. To study convergence of the grounding-line position  $x_+(t)$, we define
$x_+(t)$, we define  $x_+^{\bullet }(t)$ to be the fine-resolution solution. We observe that
$x_+^{\bullet }(t)$ to be the fine-resolution solution. We observe that  $\|x_+ - x_+^{\bullet }\|_2/\|x_+^{\bullet }\|_2$ decreases approximately linearly for larger values of
$\|x_+ - x_+^{\bullet }\|_2/\|x_+^{\bullet }\|_2$ decreases approximately linearly for larger values of  $\Delta x$ and
$\Delta x$ and  $\Delta t$ (figure 8b). Convergence at smaller
$\Delta t$ (figure 8b). Convergence at smaller  $(\Delta x,\Delta t)$ becomes superlinear because
$(\Delta x,\Delta t)$ becomes superlinear because  $x_+ \to x_+^\bullet$ when
$x_+ \to x_+^\bullet$ when  $(\Delta x,\Delta t)\to (12.5\ \mathrm {m},1/2000\ \mathrm {yr})$. We also provide time series of
$(\Delta x,\Delta t)\to (12.5\ \mathrm {m},1/2000\ \mathrm {yr})$. We also provide time series of  $\mathcal {V}/\mathcal {V}_0$ and
$\mathcal {V}/\mathcal {V}_0$ and  $x_+$ for
$x_+$ for  $\kappa =\kappa _0$ and a range of element widths (figure 9).
$\kappa =\kappa _0$ and a range of element widths (figure 9).

Figure 8. (a) Convergence of volume change  $\mathcal {V}(t)$ to the exact value
$\mathcal {V}(t)$ to the exact value  $\mathcal {V}_{true}(t)$ with decreasing element width at the lower boundary
$\mathcal {V}_{true}(t)$ with decreasing element width at the lower boundary  $\Delta x$ for different CFL numbers
$\Delta x$ for different CFL numbers  $\kappa := x_g' \Delta t/\Delta x$, where
$\kappa := x_g' \Delta t/\Delta x$, where  $x_g'$ is the maximum grounding-line speed for the fine-resolution simulation (
$x_g'$ is the maximum grounding-line speed for the fine-resolution simulation ( $\Delta x=12.5$ m and
$\Delta x=12.5$ m and  $\Delta t = 1/2000$ yr). The CFL number
$\Delta t = 1/2000$ yr). The CFL number  $\kappa _0 \approx 0.96$ corresponds to the black circles. (b) Convergence of the grounding-line position
$\kappa _0 \approx 0.96$ corresponds to the black circles. (b) Convergence of the grounding-line position  $x_+(t)$ to the fine-resolution position
$x_+(t)$ to the fine-resolution position  $x_+^{\bullet }(t)$ (
$x_+^{\bullet }(t)$ ( $\Delta x=12.5$ m and
$\Delta x=12.5$ m and  $\Delta t = 1/2000$ yr) as
$\Delta t = 1/2000$ yr) as  $\Delta x$ decreases for different CFL numbers. Linear convergence in
$\Delta x$ decreases for different CFL numbers. Linear convergence in  $\Delta x$ and
$\Delta x$ and  $\Delta t$ are noted by the black dashed lines in (a,b). The penalty parameter is
$\Delta t$ are noted by the black dashed lines in (a,b). The penalty parameter is  $\varepsilon =10^{-13}$.
$\varepsilon =10^{-13}$.

Figure 9. (a) Volume change and (b) grounding-line position time series with a CFL number of  $\kappa =\kappa _0\approx 0.96$ over a range of
$\kappa =\kappa _0\approx 0.96$ over a range of  $\Delta x$. The penalty parameter is
$\Delta x$. The penalty parameter is  $\varepsilon =10^{-13}$ for all simulations.
$\varepsilon =10^{-13}$ for all simulations.
B.2. Triangular-lake benchmark
Here, we provide an additional benchmark test for validation. We rely on the expectation that the ice–water surface should remain nearly flat if the lake volume changes sufficiently slowly. We consider a wedge-shaped bed with slope  $m=1/500$ given by
$m=1/500$ given by  $\beta (x) = m|x|,$ and an initial lower surface
$\beta (x) = m|x|,$ and an initial lower surface  $s(x,0) = \max (\beta (x),s_0)$ where
$s(x,0) = \max (\beta (x),s_0)$ where  $s_0={5}/{2}$ m is constant, resulting in a triangular-initial-lake geometry. We suppose that the ice–water surface evolves as
$s_0={5}/{2}$ m is constant, resulting in a triangular-initial-lake geometry. We suppose that the ice–water surface evolves as
 \begin{equation} s(x,t) = s_0 + \dot{s}\,t \quad (\mathrm{for}\ s>\beta), \end{equation}
\begin{equation} s(x,t) = s_0 + \dot{s}\,t \quad (\mathrm{for}\ s>\beta), \end{equation}
where  $\dot {s}$ is a constant uplift rate. In this case, the grounding-line positions are given by
$\dot {s}$ is a constant uplift rate. In this case, the grounding-line positions are given by
 \begin{equation} x_\pm(t) ={\pm}\frac{s_0+\dot{s}\,t}{m}. \end{equation}
\begin{equation} x_\pm(t) ={\pm}\frac{s_0+\dot{s}\,t}{m}. \end{equation}
The volume change associated with (B1) and (B2) is given by  $\mathcal {V}(t) = \mathcal {V}_0(1+({\dot {s}}/{s_0})t)^2,$ where
$\mathcal {V}(t) = \mathcal {V}_0(1+({\dot {s}}/{s_0})t)^2,$ where  $\mathcal {V}_0$ is the initial volume. We provide the associated volume change rate
$\mathcal {V}_0$ is the initial volume. We provide the associated volume change rate  $\dot {\mathcal {V}}(t) = {2\mathcal {V}_0 \dot {s}}/{s_0}(1+({\dot {s}}/{s_0})t) \label {Vdotslow}$ as input in the numerical tests for various values of
$\dot {\mathcal {V}}(t) = {2\mathcal {V}_0 \dot {s}}/{s_0}(1+({\dot {s}}/{s_0})t) \label {Vdotslow}$ as input in the numerical tests for various values of  $\dot {s}$ (figure 10).
$\dot {s}$ (figure 10).

Figure 10. (a) Convergence of  $x_+$ towards the expected slow-filling solution ((B2), dashed line) as
$x_+$ towards the expected slow-filling solution ((B2), dashed line) as  $\dot {s}$ becomes small. The final time
$\dot {s}$ becomes small. The final time  $T$ is related to the filling rate by
$T$ is related to the filling rate by  $T=s_0/\dot {s}$. (b,c) Free-surface plots for larger values of
$T=s_0/\dot {s}$. (b,c) Free-surface plots for larger values of  $\dot {s}$ at the final time. (d) Free-surface plot for small
$\dot {s}$ at the final time. (d) Free-surface plot for small  $\dot {s}$ at the final time. The grounding lines (black triangles) and ice–water elevation (red line) are close to the asymptotic solutions ((B2), open triangles) and ((B1), dashed line), respectively. For all simulations,
$\dot {s}$ at the final time. The grounding lines (black triangles) and ice–water elevation (red line) are close to the asymptotic solutions ((B2), open triangles) and ((B1), dashed line), respectively. For all simulations,  $\Delta x = 50$ m,
$\Delta x = 50$ m,  $\Delta t = 10^{-3}$ yr and
$\Delta t = 10^{-3}$ yr and  $\varepsilon =10^{-14}$.
$\varepsilon =10^{-14}$.
We set  $\dot {s} = s_0/T$ and vary the final time
$\dot {s} = s_0/T$ and vary the final time  $T$ so that the total water volume change is always the same. In the slow-filling limit (
$T$ so that the total water volume change is always the same. In the slow-filling limit ( $\dot {s}\lesssim 5/128\ \textrm {m}\ \textrm {yr}^{-1}$), the numerical grounding-line position remains within
$\dot {s}\lesssim 5/128\ \textrm {m}\ \textrm {yr}^{-1}$), the numerical grounding-line position remains within  $2\Delta x$ of the asymptotic solution (figure 10a). The small discrepancy arises because a rapid initial adjustment causes the ice–water surface to meet the bed tangentially whenever
$2\Delta x$ of the asymptotic solution (figure 10a). The small discrepancy arises because a rapid initial adjustment causes the ice–water surface to meet the bed tangentially whenever  $\dot {s}>0$; this effect also occurs in a similar model of subglacial cavitation (Fowler Reference Fowler1986; Schoof Reference Schoof2005). At fast filling rates, a crack-like geometry develops near the grounding lines as they rapidly migrate outwards (figure 10b,c). At slower filling rates, the ice–water surface remains flat and approaches the asymptotic solution (B1).
$\dot {s}>0$; this effect also occurs in a similar model of subglacial cavitation (Fowler Reference Fowler1986; Schoof Reference Schoof2005). At fast filling rates, a crack-like geometry develops near the grounding lines as they rapidly migrate outwards (figure 10b,c). At slower filling rates, the ice–water surface remains flat and approaches the asymptotic solution (B1).























































































