



ABBREVIATIONS
- AUAM
autonomous urban air mobility
- ARPs
aerospace recommended practices; standards issued by Society of Automotive Engineers (SAE)
- CAA
Civil Aviation Authority
- (e)VTOL
(electrical) vertical take-off and landing
- LoA
level of autonomy
- RPAS
remotely piloted aircraft system
- ODM
on-demand mobility
- SoS
system of systems
- UAM
urban air mobility
- UAS
unmanned aircraft system
- UTM
unmanned traffic management
1.0 INTRODUCTION
Over the past few years, aviation has seen a rapid evolution due to the development and adoption of unmanned vehicles for use underwater, on the surface, in air and in space(Reference Huang, Pavek, Novak, Albus and Messin1).
The concept of Autonomous Urban Air Mobility (AUAM) has been presented by several authors using other names such as On-Demand Mobility (ODM), air taxis or vertical mobility. All these terms are used to describe on-demand, fully autonomous systems to transport passengers and/or cargo in an urban environment using airspace as a third dimension(Reference Lascara, Lacher, DeGarmo, Maroney, Niles and Vempati2–Reference Roosien and Bussink4).
This concept will bring societal and environmental benefits due to the use of direct trajectories, increased speeds and point-to-point transport without the need for roads or other ground infrastructure(Reference Moore5). These advantages are expected to translate into:
Less travel time
Increased point-to-point accessibility (mobility)
Improved cost efficiency
Better integration of, and options for, means of transport with the community
Autonomous flight involves aircraft that do not have a pilot on board nor are remotely piloted from a ground station in a non-segregated airspace. Rather, the aircraft are exclusively controlled by onboard systems.
This capability is already available in small, unmanned aircraft and should soon be adopted for other types of aircraft. The introduction of such new technology is commonly expected to increase aircraft safety, although sometimes not with immediate results.
The Airbus historical accident analysis report(6) shows improved flight safety performance indicators despite the increasing numbers of flights and aircraft in recent years. According to Airbus, this safety improvement is directly related to the adoption of technologies such as Fly-By-Wire (FBW), Flight Management System (FMS) and Terrain Awareness and Warning System (TAWS).
In this context, one may note that AUAM will not be addressed merely by tackling airspace integration of piloted aircraft with unmanned (either remotely piloted or autonomous) aircraft. Adopting this solution to accommodate fully autonomous aircraft with or without passengers on board shall be proceeded by the adoption of new technologies and procedures.
Indeed, AUAM needs to adopt a System of Systems (SoS) perspective to address the integration of any type of operated aircraft, which by itself represents a complex system. In this respect, SoS can be defined as ‘collaborative systems’ based on a nonphysical architecture, having a set of standards that allow meaningful communication among its components(Reference Maier7). The main objective of an SoS is thus to deliver a capability that a single system cannot deliver alone. Examples include energy grids, transport networks and air traffic management systems(Reference Nielsen, Larsen, Fitzgerald, Woodcock and Peleska8).
The approach of several aircraft to an airport can be considered to represent a complex system, and the operations above an urban area require the integration of several systems (public or personal transport with the associated infrastructure, radio or physical communications infrastructure or an energy distribution grid). The integration of these components thus falls within the description of SoS.
Today, transportation solutions for high-density urban areas include ground vehicles (cars or motorcycles) for short distances (whether on-demand or not), trains for both short- and mid-range trips and aircraft for long-distance journeys(Reference Moore9). Currently, cities are becoming increasingly congested with traffic, including commuting, and easy solutions at the ground level are not foreseen. Moore(Reference Moore9) presented on-demand aircraft as a mobility breakthrough bounded to “free flight” airspace management and aligned with environmental sustainability.
Presently, the only above-the-ground solution able to operate inside urban areas is helicopters, without the need for a large infrastructure when compared with even small regional airports.
In this regard, combining the concept of helicopter-like operation (essentially a VTOL solution) with the capabilities of on-demand aircraft services and new technological enablers such as electric propulsion applied to novel aircraft configurations will allow urban air mobility to achieve the desired goals: less transit time at a competitive cost compared with other transport alternatives in an ecofriendly fashion.
To be competitive, VTOL aircraft must combine several capabilities to become an alternative to ground-level transportation with low noise and a range between 30 and 160km(Reference Antcliff, Moore and Goodrich10).
Normally, above cities, aircraft traffic is mainly composed of helicopter passenger transport for sightseeing or Very Important Person (VIP) transport, sometimes with operational limitations imposed by airports in the outskirts of cities due to the proximity of arrival and departure routes.
The introduction of partially autonomous aircraft and the development of systems with decision-making abilities (without human interaction) drives the expectation of increased system safety levels, reliability, affordability and the accomplishment of more complex missions(11).
Cokorilo(Reference Cokorilo12) states that the introduction of new technology, such as that required for UAM, will have an impact on the safety of aircraft operations by avoiding flight crew errors, leading to safety issues that should be understood and developed under new safety goals and safety management principles.
The adoption of eVTOL aircraft aims to lower operational costs through lower fuel/energy requirements, maintenance and pilot costs associated with very high utilisation and high reliability. This improved efficiency will lead to an increase of operational flexibility, high utilisation, low environmental impact and low cost at an equivalent safety level when compared with automotive and airline options(Reference Moore5).
New eVTOL aircraft architectures may contribute to eliminating the complex mechanical architecture of conventional helicopters, replacing power transmissions and gearboxes by one or more electrical motors.
Based on the discussion above, this paper presents the state of the art of urban air mobility as a starting point to derive a scenario aimed at synthesising an operational concept to assist further research work targeting approved AUAM operation, which mostly depends on the following stakeholders:
Authorities and regulators
Airspace management service providers
Original Equipment (aircraft) Manufacturers (OEMs)
Infrastructure providers
Operators
The first two stakeholders provide legislation, standardisation and services that will enable operations using technological resources provided by OEMs and infrastructure to be used by operators in moving passengers from one place to another upon request. The interactions between these stakeholders are shown in Fig. 1, and further detail on this is provided below.

Figure 1. Stakeholders in the UAM context for autonomous flight operations (author concept).
This section presents a short introduction to the problem. Section 2 presents a description of the state of the art with an analysis of the main issues. In Section 3, the operational concept and its requirements are presented as the main contribution of this research. Finally, Section 4 presents future work to be developed and the conclusions of this research.
2.0 BACKGROUND
2.1 Autonomous versus automated
An ‘autonomous system’ is defined as one that takes actions on its own to achieve goals provided independently by whomever defines them or will benefit from their achievement. Also, the decision-making process is local and offline(Reference Helle, Schamai and Strobel13–Reference Figueroa and Walker16).
On the other hand, for an ‘automated system’, the action to be performed whenever an unplanned situation occurs is already encoded into the system. A designer must encode all the cases and the corresponding strategies to deal with all such events.
This process occurs externally to the system(Reference Frost15). An ‘intelligent autonomous system’ simulates human responses using sophisticated mechanisms. Such a system can sense, plan and act independently of any code embedded based on the environment, achieving a goal with no external control(Reference Frost15,Reference Beer, Fisk and Rogers17) .
According to the International Civil Aviation Organization (ICAO) RPAS manual(18), an ‘Autonomous aircraft’ is an unmanned aircraft that does not allow pilot intervention in the management of the flight.
Likewise, ‘autonomous operation’ is defined as that where an unmanned aircraft operates without the possibility of remote pilot intervention in the management of the flight(18,19) .
With increasing levels of autonomy and its application to unmanned systems, the National Institute of Standards and Technology (NIST) created the Autonomy Levels for Unmanned Systems (ALFUS) workgroup to address this increasing need and compile the work performed in different departments across the United States. The result is shown in Fig. 2, where the level of autonomy is determined by an evaluation of the mission complexity, environmental difficulty and human independence(Reference Huang, Pavek, Novak, Albus and Messin1,Reference Huang20,Reference Elbanhawi, Mohamed, Clothier, Palmer, Simic and Watkins21) .
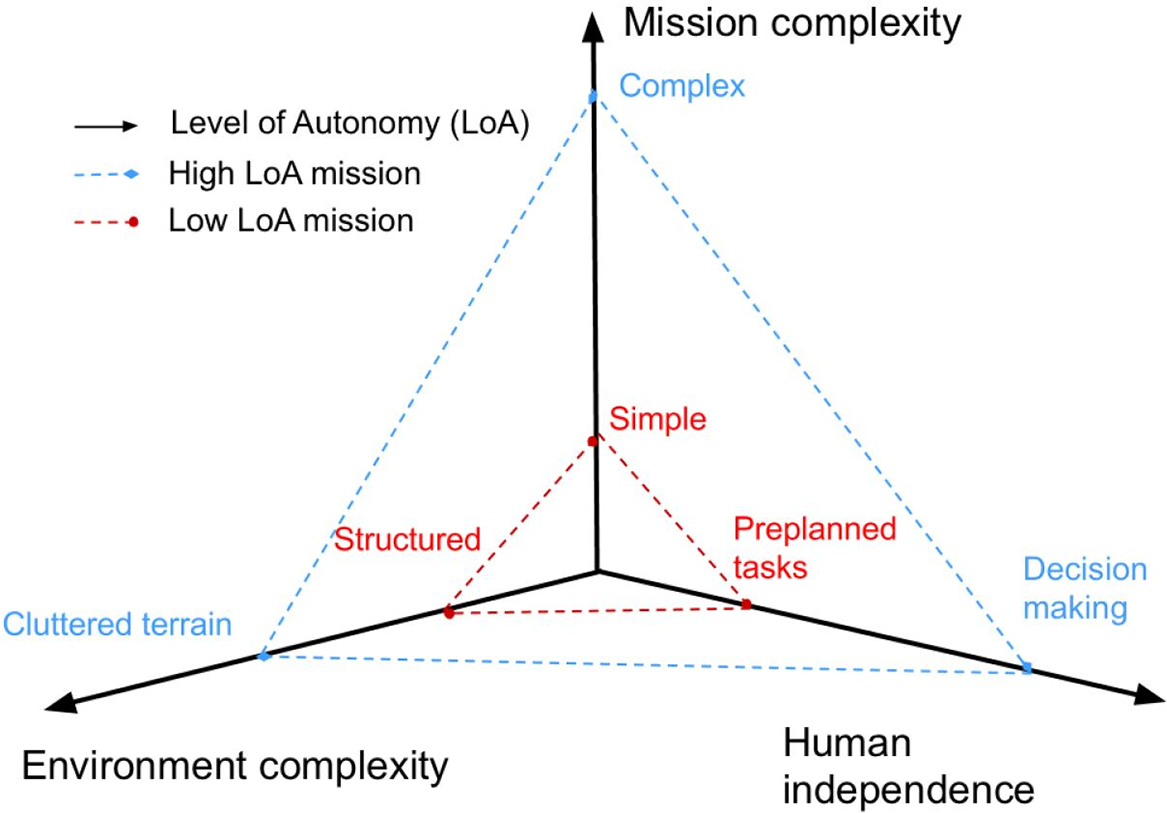
Figure 2. ALFUS framework, evaluation of different missions. Retrieved from Ref. (Reference Elbanhawi, Mohamed, Clothier, Palmer, Simic and Watkins21).
In this context, a Level of Autonomy (LoA) classification does not yet exist, although it is deemed necessary and is not currently included in aviation safety regulations(Reference Clothier, Williams and Perez22). The implementation of complex high-level decision-making is already being achieved through the use of neural networks, agent-based architectures and probabilistic reasoning. These technologies remain a challenge for the certification of the level of flight safety in normal aircraft operations(Reference Clothier, Williams and Perez22). Figure 2 provides more detail.
Another industry approach was defined and applied to autonomous road vehicles by the Society of Automobile Engineers (SAE). They defined five levels of autonomous driving, as presented in the table in Fig. 3, where a correlation matrix of the levels of autonomy and the activities performed by the system or driver is presented. For lower levels of autonomy, more intervention from the driver is required. As the level of autonomy is increased, more activities are performed by the system, thus diminishing the driver’s responsibility in taking control and decisions. At level 5 (full automation), no human intervention is required in the different stages of driving(Reference Litman23).

Figure 3. SAE driving levels of autonomy – retrieved from SAE International.
The automation of a system can be evaluated and classified at many levels regarding its performance(Reference Parasuraman, Sheridan and Wickens24). Another method of evaluation that is commonly used is the levels of automation of decision and action selection, which has ten levels, where level 1 involves no computer assistance while level 10 requires no interaction with humans with decisions being made only by the system(Reference Parasuraman, Sheridan and Wickens24).
Also in the aeronautical domain, automation has been studied over recent years, to reduce pilot activities and thus the need for two pilots on board. Aircraft operations are now more reliant than ever on automation to ensure safety levels with the introduction of new functionalities, responsibilities and effective human–autonomy teaming(Reference Bailey, Kramer, Kennedy, Stephens and Etherington25).
There is a general feeling that “the greatest obstacle to the development of a civil, single-pilot aircraft is not the technology per se but applying the technology and developing the automation and user interfaces”, enabling near-zero crew activity to become a reality(Reference Bailey, Kramer, Kennedy, Stephens and Etherington25).
General aviation is still far away from fully autonomous piloting, although the introduction of some degree of automation has brought advantages and disadvantages related to pilot skills and awareness. Some advantages are described in the work developed by the European Aviation Safety Agency (EASA) Internal Group on Personnel Training(26) and can be summarised as follows:
– Flight safety improvement, i.e. envelope protection, velocity limitation, etc.
– Improved technical reliability
– Aircraft control (from the engine to navigation accuracy and improved aerodynamic performance)
– Improved flight path control
– Increased navigation awareness
– System monitoring and diagnostic assistance
– Automation relives pilot from repetitive tasks, reducing workload
In the same way, disadvantages can also arise from automation in the form of:
– Reduced capability for interaction among crew
– Gaps in training due to different levels of flight automation between aircraft
– Reduced task/alert prioritisation capability
– Reduced standardisation and workload management
– Erosion of manual flying skills of pilots
2.2 Urban areas with high population density
In terms of the operational environment, ICAO annex 11 divides airspace systems into classes A–G, reflecting their operational requirements. States can choose how to separate and classify their own airspace. Class A, B and C airspace is mainly used by commercial transport aircraft. Classes C, D and E are used by general aviation that normally operates out of small airports. Class G corresponds to very low heights and uncontrolled airspace outside of controlled airports. Class F airspace is designated as ‘uncontrolled’, although ATC clearances and separation can be provided, mainly when entering and exiting the area. Figure 4 depicts each of these airspace classes as used in the United States.

Figure 4. Airspace classes, retrieved from Ref. (28).
In addition to the abovementioned classes, Atkins(Reference Atkins27) proposes a subdivision of airspace class G to include class U from the surface to 500ft (ca. 150m) above ground level.
At the moment, several projects are being developed to enable flight in class G airspace, namely integrating UAS operation into an urban environment, thus creating the need for an Unmanned Traffic Management (UTM) system. One bottleneck identified in increasing the number of aircraft in class G airspace is the ATC workload, so it is envisaged that an architecture similar to UTM will be adopted by UAM(Reference Thipphavong29).
The UTM concept defined by the Global UTM Association, a Swiss non-profit organisation, states the following:
“The UTM Concept is a complex system in which several stakeholders contribute to ensure the required safety level of UAS operations. For this reason, UTM is defined as a system of stakeholders and technical systems collaborating in certain interactions, and according to certain regulations, to maintain safe separation of unmanned aircraft, between themselves and from ATM users, at very low level, and to provide an efficient and orderly flow of traffic”(30).
Low(Reference Huat-Low31) presented his vision for management of the Singapore urban airspace for UAS operation. He proposes that the city be mapped and defines several strategies to ensure effective unmanned aircraft operations. These strategies for flight in urban airspace are presented in Fig. 5, where several constraints are imposed, namely a safe distance between aircraft, limitation of entering/leaving operational areas with the introduction of geofencing, route delimitation and pre-designated landing and take-off areas(32).

Figure 5. NTU proposed concept for air traffic management solutions for unmanned aircraft systems. Retrieved from Ref. (32).
Pathiyil et al.(Reference Pathiyil, Low, Soon and Mao33) also presented some solutions to overcome UAS traffic management challenges with the creation of specific lanes/tunnels, the use of existing infrastructures and the application of geofencing technology with vertical and horizontal separation.
The operation of unmanned aircraft in an urban environment leads to challenges such as the need to prevent collisions between unmanned vehicles or even with manned aircraft or other flying objects and buildings in the urban skyline.
This context makes it necessary to address the airspace capacity, complexity, safety and efficiency of UAS operations in a holistic manner(Reference Pathiyil, Low, Soon and Mao33). The inclusion of autonomous aircraft with passengers on board will increase the complexity and create more safety concerns related to these areas.
Holden and Goel(Reference Holden and Goel34) presented Uber’s view on the business model with a feasibility study for an eVTOL aircraft service and cost analysis for consumers. Given the existing technical knowledge, they conclude that it is possible to achieve safe personal transportation within an urban area. They also conclude that, for a certain scale of business, a VTOL service is possible at a reasonable cost, eventually leading to mass operation.
To enable the use of autonomous aircraft in urban areas, new infrastructure/hub concepts are identified:
– ‘Vertiports’ (VTOL hubs with multiple take-off and landing pads, as well as charging infrastructure)
– ‘Vertistops’ (a single VTOL pad with minimal infrastructure)
Regarding the regulation of the construction and operation of heliports, guidelines exist from civil airworthiness authorities based on ICAO annex 14 volume II. The approval requirements for the design of US heliports can be found in FAA advisory circular (AC) 150/5390-2C. The EASA is still developing rules under Notice of Proposed Amendment 2017–14, to be called CS-HPT-DSN(19,35) .
In the aforementioned regulations, requirements are provided regarding operational areas, taxiways and taxi routes, helicopter parking, obstacle limitation and other requirements.
One aspect presently not addressed in the available literature is autonomous aircraft operating under a UTM system and using a heliport approved for Visual Flight Rules (VFR) and that can be used by other aircraft operating with a common ATM system.
The US air traffic management system has recently seen new developments with the introduction of technologies such as automatic dependent surveillance-broadcast, performance-based operations, weather integration and network data communications through NextGen programme of the National Aeronautics and Space Administration (NASA)(Reference Sridhar and Kopardekar36).
In Europe, civil aviation safety is ensured by Basic Regulation (EC) N0 216/2008 of 20/02/2008 on common rules that define the EASA by ‘force of law’ as the entity to supervise and interact with National Aviation Agencies (NAAs).
With regard to product certification, i.e., type certificates issued by the EASA, several documents are available with different levels of requirements to demonstrate and gather evidence on aircraft safety and the ability to fly safely.
These certification specifications address the applicable product system to be certified and mainly the number of passengers, Maximum Take-Off Weight (MTOW) and type of operation to be performed (performance, VFR, Instrument Flight Rules (IFR), etc.).
Additionally, the said certification specifications include subparts with requirements to certify onboard equipment (based on FAR/CS 25.1309). As a complement to certification specifications, acceptance means of compliance apply to them, providing information on procedures and activities to demonstrate compliance to a safety level.
Finally, certification specifications consider the use of supporting documentation, which is also referenced and available through standardisation groups to ensure a certain level of analysis that substantiates safe performance of the system, where the safety assessment process guideline is presented in SAE’s ARP4754 international standard(37).
In Europe, the current safety review process is based on the CS 25.1309 certification requirement that calls for Aerospace Recommended Practices (ARPs) developed by ASTM, namely ARP4754 and ARP4761.
Based on this discussion, it becomes necessary to consider different systems architectures that will enable autonomous flight operation, ensuring the safety of passengers as well as aircraft flying in the vicinity of autonomous aircraft and having at least an Equivalent Level of Safety (ELOS) to that of manned aircraft.
Table 1 presents the relationship between the failure condition and the allowable probability of the event per flight hour for manned aircraft, where a catastrophic event should have an extremely low probability of <10–9.
Table 1 Relation of probability with severity of failure condition. Retrieved from Ref. (39)

Note: A numerical probability range is provided as a reference. The applicant is not required to perform a quantitative analysis, nor substantiate by such an analysis that this numerical criterion has been met for minor failure conditions. Current transport category aircraft products are regarded as meeting this standard simply by using current commonly accepted industry practice.
The implementation of more technology implies a greater demand for software as well as extensive compliance with industry standards such as DO-178C(Reference Torens, Adolf and Goormann38).
It can thus be stated that the type of operation, systems architecture, environment and interaction with other aircraft will always impact on safety and should be addressed in certification specifications.
2.3 Operation of RPAS in European airspace
Another aspect is the operation of RPAS in European airspace. According to Regulation 2018/1139 of the European Parliament and of the Council of 4 July 2018, operations should be subject to rules that are proportional to the risk of the particular operation or type of operations regardless of aircraft mass. National authorities have the responsibility to implement a risk-based approach while ensuring an adequate level of safety(40,41) .
EASA opinion 01/2018 published on 6 February 2018, proposing a new European regulation for UAS operations, laid down regulations regarding the operation of unmanned aircraft for open and specific categories as well as for minor- to higher-risk operations, respectively.
These regulations were approved in June 2019 by Commission Delegated Regulation (EU) 2019/945 and Commission Implementing Regulation (EU) 2019/947. These include a 2-year transition period. For risk-based assessment of operations, EASA adopted the Specific Operation Risk Assessment methodology developed by the Joint Authorities for the Rulemaking of Unmanned Systems (JARUS) group.
Operations in the RPAS open and specific categories are under the responsibility of national civil authorities, with some differences between countries.
In this context, UAS operations are approved after a systemic operation review, which includes a risk assessment by the UAS operator.
As standard scenarios are still under development and not yet issued, operations are approved on a case-by-case basis, based on:
– An operational plan
– An emergency and contingency plan
– Detailed specifications of the UAS (whichcan include detailed information on communications systems and procedures, RPAS configuration, flight limits, etc.)
– A Specific Operation Risk Assessment (SORA) for the proposed operation
Also, the organisation proposing to conduct the operation must supply evidence of the pilots’ proficiency and sufficient knowledge to ensure flight safety as stated in the required documentation.
EASA has still to approve regulations to create RPAS training organisations that may issue RPAS certification for pilots and technicians mainly for the operation of specific aircraft. The development of regulations for certified operations by the EASA is still underway, with no planned publishing date.
One objective of the present work is to analyse strategies and technologies used in UAS developments to enable an assessment of whether the current approach can be extrapolated to urban air mobility.
UAS operators use a risk-based approach to achieve operational approval. If the risk is higher, a certification process is required. Unmanned aircraft operators use SORA to perform a risk-based approach using kinetic energy and operational risk analysis, i.e. depending on size and maximum velocity. Operational risk is assessed through a qualitative perception of risk to people and infrastructure that are overflown by the RPAS.
2.4 Aircraft systems
Aircraft designs and configurations have evolved in recent years as a consequence of UAM needs. Currently, more than 240 vehicles are being developed worldwide(42). Major aircraft manufacturers such as Airbus, Boeing, Embraer and Bell and even automotive industry manufacturers (e.g. Audi and Nissan) or start-up companies (e.g. Volocopter and Lilium) are currently developing concepts for aircraft that can operate in urban environments.
eVTOL aircraft can assume multiple configurations, and it is difficult to track the developments of the many start-ups and other more well-known organisations(Reference Bacchini and Cestino43). One source to keep track of such developments is the Electric VTOL News (42), where more than 170 aircraft are classified into several categories:
– Vectored thrust
– Lift + cruise
– Wingless (multicopter)
– Hover bikes/devices
– Electrical rotorcraft
Clarke et al.(Reference Clarke, Smart, Botero, Maier and Alonso44) presented a comparison of the performance based on a mission profile, leading to a new aircraft development methodology that demonstrates the dependence between the configuration and mission objective.
Silva et al.(Reference Silva, Johnson, Solis, Patterson and Antcliff45) analysed three aircraft configurations: quadrotor, side-by-side and lift + cruise. All these configurations generated issues and several areas for future research, including:
– Tools to develop and analyse aircraft performance
– Datasets for validation
– Propulsion technologies and batteries
– Edgewise fixed-pitch rotors
Aircraft configurations are related to the mission objective and specific performance requirements. This statement is based on the thrust typology per aircraft mass, as demonstrated in Fig. 6. This figure reveals that the vectored thrust typology is the solution most often adopted and implemented in the mass range from 400 to more than 1,500kg, although other typologies can also be adopted in this range.

Figure 6. Thrust typology per aircraft weight. Retrieved from Ref. (42).
2.5 A review of UAM operational concepts
Several authors have envisioned operational concepts for UAM. NASA has been one of the main sponsors of UAM. They are working on a main concept to implement high-density operations using a small number of vertiports interconnected with a main hub and managed by a UAM operator. They are also planning in a next phase to develop mature UAM operations in a network with multiple hub locations, potentially with several vehicles and operations(Reference Thipphavong29).
The following types of operation are foreseen:
Private air transport
Personal scheduled transportation
Personal unscheduled transportation (on-demand mobility)
Commercial scheduled transportation
Greenfeld(Reference Greenfeld46) proposed several scenarios for different types of operations in an urban environment using a communication system for Command and Control (C2) with a remote pilot in command, considering all structural obstacles and radiofrequency noise/threats.
Prevot et al.(Reference Prevot, Rios, Kopardekar, Robinson, Johnson and Jung47) proposed a UTM concept for the operations and architecture with information flow for controlling the operations of small, unmanned aircraft in uncontrolled airspace (class G). No interaction with any other airspace class or ATM system was envisaged by those authors.
Various strategies for airspace integration were proposed by Lascara et al.(Reference Lascara, Lacher, DeGarmo, Maroney, Niles and Vempati2), including:
– Augmented visual flight rules
– Dynamic delegated corridors
– Automated decision support services
– Performance-based operations
An alternative concept to UTM is that of Remote Operations Centres (ROCs), presented in Fig. 7, which would interface with ATC and be responsible for traffic management and ensuring safe operations of aircraft flying in the area(Reference Nneji, Cummings, Stimpson and Goodrich48). This concept is halfway between a fully autonomous system and one with several levels of human intervention.

Figure 7. ROC system boundary. Retrieved from Ref. (Reference Nneji, Cummings, Stimpson and Goodrich48).
Although international operational rules and procedures for the flight of autonomous aircraft in urban areas are yet to be developed, OEMs are proposing requirements to be considered during ongoing aircraft development phases via guidelines available from other aviation areas such as light aircrafts and VTOL aircraft, with some simplification.
Concerning the range of operations, Fig. 8 presents a comparison of travel distance versus time for a car and a VTOL aircraft. Bacchini and Cestino(Reference Bacchini and Cestino43) present reference missions related to distance as follows:
– 7km, defined as an urban mission
– 30km, named an extra-urban mission
– 100km, defined as a long-distance mission

Figure 8. Comparison of 40min travel between car and eVTOL aircraft, retrieved from Ref. (Reference Scalabrin49).
Operational concepts that enable UAM must define and establish all the boundaries related to safe aircraft operation in an urban environment and cover at least the following topics:
∘ Operational environment
∘ Operation constraints
∘ Operational use cases
∘ Pre-flight phase
∘ Flight phase
∘ Post-flight phase and ground operations
∘ Airworthiness
The resolution of these topics will enable the development of requirements to address all the shortcomings and issues for this new type of operation. These topics are developed in the next section.
Having identified the relevant aspects of the operation of UAM in urban areas, the next section addresses the operational concepts that will create reference conditions to allow the establishment of a high-level functional architecture describing how this type of systems can be operated.
3.0 OPERATIONAL CONCEPTS FOR URBAN AIR MOBILITY WITH UNMANNED AIRCRAFT – REFERENCE FRAMEWORK
3.1 The approach
Although the term ‘Concept of Operations’ (ConOps) is mostly used in the defence sector, this methodology is fully applicable to capture the requirements of UAM operation with unmanned aircraft, given the nature and type of information contained in such documents.
Despite being a generic document, the ConOps addresses the aspects that an operator needs to consider, mainly from a mission standpoint or eventually from a lifecycle perspective, covering inter alia technical, regulations and support aspects.
Likewise, using the ConOps reference approach to capture UAM operations, the conditions contained therein enable the identification of several specific aspects.
This section provides a compilation of the various operational aspects that are considered to enable UAM operations with unmanned aircraft – either remotely piloted or with autonomous operation capability.
Given the nature of this section, we do not attempt to establish legal, technical or operational requirements, but rather a set of conditions to act as a reference for operational concepts.
In brief, the strategy of this section is to derive a neutral, global (not for a specific operator), realistic and plausible ConOps for UAM operations using unmanned aircraft. This ConOps aims to capture the specific aspects that can only be dictated by aeronautical regulations or even by imposing the existence of specific aircraft systems that will provide certain operational features, e.g. collision avoidance, terrain alerts, automatic landing, etc.
In this respect, the considered ConOps applies to urban areas with a high density of buildings, traffic and people, essentially providing the conditions for the associated business models.
This ConOps is aligned with the On-Demand Mobility (ODM) business model using an autonomous aircraft with VTOL capability.
In this perspective, the main objectives of the ConOps are to:
– Establish the relevant stakeholders
– Define the operational environment strategies
– Describe the operational cases
– Outline the operational scenarios
– Delimit the operational conditions
3.2 Stakeholders
The ConOps definition starts with the identification of the stakeholders. The stakeholders for the UAM are considered to be:
– Authorities and regulators
– Airspace management service providers
– UAM service providers (operators)
– Infrastructure providers
– OEMs
– UAM users
The definition of the group of stakeholders is critical because each entity has a significant impact on the development of UAM.
Analysis of each stakeholder is an effective method to understand its contribution to the UAM process(50). A structured stakeholder analysis along with the interaction of stakeholders for the different phases and the modelling process is proposed in Table 2.
Table 2 Stakeholder impact analysis in the UAM process definition

3.3 UAM unmanned aircraft missions: outlook
To act as a reference characterising aircraft systems and airspace management capability, a typology for missions for unmanned aircraft for UAM to be requested by potential users is presented below:
– Range: 100km
– Reserve: At least 20min in hovering condition
– Maximum operating altitude: 6,000ft above MSL
– Minimum operating altitude: limited to 300ft above MSL
– Distance to buildings: dependent upon local noise restrictions
– Cruise velocity: 150km
The following operating segments are currently considered as a reference for operation:
– Taxi and flight preparation: 5min
– Climb: 8min
∘ Vertical: 3min
∘ Transition to forward flight: 5min
– Cruise distance: according to trip range
– Descent: 8min
∘ To hover condition: 5min
∘ Vertical landing: 3min
– Land and power-off: 5min
– Abort and diversion: 20min
Figure 9 graphically summarises each of the above ConOps conditions for UAM.
Also, the existing 14 CFR 91.151 regulation from the FAA requires a reserve of 20min of flight time at cruise speed for VFR rotorcraft(Reference Finger, Gtten, Braun and Bil51), while the EASA Part-CAT operating procedures for helicopters state the same 20min flight time reserve for VFR or 30min for IFR flights(52).

Figure 9. UAM operational concept, segments (developed by the author).
Although the estimated total flight time for this type of operation is less than 40min, a reserve of 20min is proposed for cruise and loiter from an aborted landing to a new landing site. This approach is very conservative as it considers a 50% energy reserve for operation under normal conditions. In the future, this should be further elaborated to confirm its effect on safety and whether this percentage can be reduced.
3.4 UAM meta-system: outline
UAM operations are dependent on the capability of future UAM unmanned aircraft to use urban airspace while ensuring safe operation for people in the air and on the ground.
Future UAM unmanned aircraft can be decomposed into several groups that will communicate and transfer data between them. Figure 10 details the data flow foreseen between the various components of the UAM meta-systemFootnote 1.

Figure 10. UAM meta-system interaction (developed by the author).
This outline of the UAM meta-system is of fundamental importance to the operational concept because it dictates how the operators will develop and carry out each UAM mission.
3.5 Operations
The various elements of the operational features essential for the formulation of the UAM ConOps for unmanned aircraft are described below:
Operational environment
UAM operation with unmanned aircraft must be compatible with international airspace rules and procedures and should be able to integrate with existing aircraft flying IFR and VFR missions.
Changes to airspace in urban areas should be imposed with the adoption of a new ATM system that can cope with all the types of aircraft operating in the area. Most urban areas are controlled by an ATM system due to the presence of airports in the vicinity (class B or C airspace). Nevertheless, some suburban areas may already fall into class G.
Some strategies for airspace integration include:
– Detect-and-avoid systems compatible with VFR
– Traffic management compatible with free flight and dynamic corridor strategies
– Data integration between UTM and other systems such as meteorological, obstacles, restricted areas, etc.
One crucial aspect will be the possibility of operating VFR (piloted) aircraft, remotely piloted aircraft and autonomous systems in the same airspace.
Adjustments to the existing airspace classes are not foreseen, although a subcategory shall be created based on UTM technology while still embracing the existing classes of airspace in affected urban areas. Also, the transition from ATC to UTM shall be modelled with data to be transferred and the coordination level between the systems.
Operational constraints
With respect to UAM mission planning, the basic essential scenarios should consider that unmanned aircraft are to be operated inside a pre-defined geofenced area and operations shall also be limited according to the available infrastructure, time of day and aircraft performance capability.
The future airspace and traffic management shall dynamically allocate airspace according to technical and operational flight requirements, based on current traffic and forecast demand in high-density scenarios(Reference Geister53). The number of unmanned aircraft flying simultaneously shall be limited by the airspace available, to available routes or operating locations.
The rules for flying in the urban operational environment shall be similar to IFR, although additional information may be required to enable this feature. The information that will flow between the systems with the required flight data will include:
Positioning in the urban area, using Differential Global Positioning System (DGPS) information associated with other measurement/location systems with high accuracy even in degraded flight conditions
The actual position regarding the nearest aircraft, through an exchange of information between aircraft and the UTM system
Flight route management, with Four-Dimensional (4D) (position and time) flight guidance, etc.
Operators shall be able to define the requirements and constraints based on their personnel, unmanned aircraft available and infrastructure available to undertake the necessary operational activities such as battery recharge, aircraft inspection or line maintenance.
Additional operational limitations can be derived and later introduced in the Operators Operations Manual (and eventually ConOps). Greenfeld [46, p. 11] presents several communication constraints that can occur in normal operation due to physical obstructions or a high density of buildings. The various geometries (sizes and shapes) of and materials used in buildings can have an adverse effect on the performance of communications. Also, bandwidth availability and weather may pose further constraints.
UAM operational exploitation: scenarios
To establish the global ConOps, unmanned aircraft for UAM are expected to be used in the following types of operationsFootnote 2:
– Emergency medical services
– Law enforcement
– Natural disaster relief
– Firefighting
– Tourism and entertainment
– Cargo delivery
– Passenger transportation (vertiport to vertiport):
∘ Scheduled
∘ On demand
– Sub-regional transport (between transport hubs, regularly to feed scheduled flights):
∘ Vertiport–regional airport
∘ Vertiport–international airport
Pre-flight phase planning
The pre-flight planning phase of the UAM mission with unmanned aircraft is an important element of the ConOps that must be considered. Relevant aspects include:
Airspace management guidelines
To enable optimised management of airspace, flights and availability of unmanned aircraft and vertiport positions, the following information shall be made available in the ConOps prior to each flight:
– Schedule (departure vertiport, arrival vertiport and time)
– Planning (routing, entry and exit from defined areas, checkpoints and aircraft separation)
– Flight schedule:
Shall consider other aircraft flights in the vicinity to ensure safety, efficiency, airspace capacity and restrictions (noise, path, etc.)(Reference Lascara, Lacher, DeGarmo, Maroney, Niles and Vempati2).
UAM unmanned aircraft flights shall always be planned before take-off with an estimated time of arrival at the destination landing site.
The landing site shall be known at the time of mission planning.
The unmanned aircraft selected for UAM operation shall always be provided with endurance that enables extra flight time for emergencies and diverting to another available landing site.
– Flight planning:
The UTM system shall be fully autonomous in its planning capacity, optimising the trajectory of the unmanned aircraft according to its origin and destination while respecting airspace rules.
It should be able to ensure sequencing and separation of unmanned aircraft during departure and arrival, while optimising flight time and turnaround on the ground to be ready for a new flight.
Also, it should balance the area capacity (unmanned aircraft flying or on the ground) while ensuring response to operational requests.
The dynamic delegated corridors concept [2, p. 8] shall be used to enable routes for UAM in airspace shared with any type of piloted aircraft.
The type and performance of the unmanned aircraft shall be considered during flight planning, and specific corridors shall be assigned to each type. The goal of this ConOps feature is to avoid assigning the same corridors to autonomous unmanned aircraft flying passengers and unmanned aircraft delivering cargo or even small, piloted aircraft.
UAM airspace configuration: guidelines
– Operation limits and conditions:
Each area of UAM operations needs to have limits to enable the operation of unmanned aircraft, considering the capacity to respond to the following aspects:
Distance to buildings and specific areas/zones
Minimum and maximum altitudes in the operating path defined by aeronautical authorities
Noise levels defined by aeronautical authorities
Rules for takeoff and landing regarding pads from which passengers and cargo load/unload(Reference Vascik and Hansman54,Reference Terekhov55)
No-flight zones
Meteorological conditions, either permanent or to be defined for specific UAM operations
Notice to Airmen (NOTAM) enforcement rules also applicable to UAM operation
– Three-Dimensional (3D) ground data:
Digital terrain maps must be available for use by UAM operators when generating flight plans for unmanned aircraft and by airspace management services when approving/validating them.
These shall also contain digital information including obstacle data and reference data (landmarks for automated position checking)
Based on such 3D data, UAM services locations shall include detailed information on:
Vertiport locations
Emergency pad locations
Emergency service (firefighters, police) locations
Landmark locations with high points or communication towers used for aircraft positioning
Operational procedures
During UAM operation, all unmanned aircraft must have the capacity to provide identification, destination and telemetry information (position, heading, velocity, etc.) through an information exchange link that will be established to control each unmanned aircraft performing a UAM mission.
This type of information is to be generated automatically in real time or upon request by the air traffic management service, or eventually by any other entity duly authorised to control UAM operations carried out by unmanned aircraft.
This aircraft information must be made available to the operator, service provider and nearby aircraft.
Flight phase
Standard operations
Standard day-to-day UAM operation with unmanned aircraft can be remotely piloted or carried out using an autonomous system without relying on human interaction to integrate the actual flight mission into the airspace without affecting the flight plans of other aircraft.
Autonomous flight of unmanned aircraft shall be operated preferably based on planned schedules (proposed departure and arrival times, according to flight planning).
The standard operation must be in non-segregated airspace shared with other manned and unmanned aircraft.
Full integration must ensure the capacity to perform a specific flight path, at flight level and separation in synchronous mode with UTM, ensuring detect and avoidance capacity and the use of onboard communication and navigation systems that allow the aircraft to deviate as requested by ATM or as an emergency response (safety driven).
Contingencies/failure modes
Muller et al.(Reference Mueller, Kopardekar and Goodrich56) proposed several strategies to be included in contingency management scenarios that may affect one or several aircraft.
The contingency situations related to UAM unmanned aircraft include at least the following situations to be addressed in the UAM ConOps for unmanned aircraft operations:
– Engine failures
– Unexpected meteorological conditions at the destination
– Unexpected operational limitations at destination (e.g. obstacles)
– Communications failure with the surrounding systems (manned and unmanned aircraft and ATM services)
– Loss of navigation systems
– Unauthorised mission path alteration (en route modification) due to system malfunction
– Lack of response to ATM request/control
The ConOps also includes contingency situations and how the unmanned aircraft in the UAM environment must respond to them:
– Engine failures: Depending on the type of aircraft (fixed or moving wing), engine failures shall deploy the parachute at the time of malfunction whilst the unmanned aircraft will have to have to decide where to land;
– Unexpected meteorological conditions and limitations at destination: The unmanned aircraft shall have the capacity to automatically divert to an alternate landing location and communicate with ATM;
– Impact of meteorological conditions en route with an impact on communications and aircraft performance;
– Internal system failure of systems preventing normal function (communication, navigation, collision avoidance, etc.)
– The emergency response must include automatic transmission to ATM services of failure, mission abort and landing at the closest landing site (aerodrome, pad, heliport, etc.).
Support for ground operations
With regard to ground operations, the ConOps for UAM with unmanned aircraft must define the following types of operations:
– Assistance to passengers entering and exiting the aircraft
– Assistance with access to and exit from the vertiport
– Assistance for cargo loading and unloading operations
– Inspection and servicing of aircraft
– Refuelling and/or battery charging
– Maintenance tasks
– Safety procedures
3.6 Regulatory framework
Despite the obvious inability to anticipate what type of regulatory elements will be established by the various authorities granting authorisation to perform UAM unmanned aircraft operations, it is unavoidable to assume that the applicable ConOps shall be constructed taking into account those specific regulations, which tend to address at least the following aspects:
– The physical and functional configurations of the authorised unmanned aircraft
– Operational routes and alternate landing sites after an emergency situation
– Security and safety procedures
– Requirements in terms of persons involved in UAM unmanned aircraft operations
The next paragraphs of this section provide those regulatory elements. Based on the state of the art, it is anticipated that these will be enforced by the aeronautical authorities and thus must be considered in the UAM unmanned aircraft operator ConOps.
Special conditions for unmanned VTOL
The EASA has already released specifications that target person-carrying small VTOL piloted aircraft with three or more lift/thrust units used to generate powered lift and also issued provisions for electrical/hybrid propulsion certification.
The small aircraft category covers those with a passenger seating configuration of up to nine passengers and a maximum certified take-off mass of up to 3,175kg.
With the first ‘building block’ release through the publication of the certification framework – known as Special Condition VTOL(57) – the EASA has provided manufacturers with requirements for them to start developing ‘innovative’ air taxi vehicles.
The ‘second block’ proposes certification requirements for electric and/or hybrid propulsion systems(58).
The ‘third block’ is composed of means of compliance for key certification requirements on the Special Condition VTOL and covers areas such as minimum handling qualities, the structural design envelope, flight-load conditions, crashworthiness, capability after bird impact, design of fly-by-wire systems, safety assessment processes, fire and lightning protection and lift/thrust system installation(59).
Based on the mentioned EASA conditions, it appears that the ConOps to be developed for UAM with unmanned aircraft should be limited to the aforesaid number of passengers for the MTOW defined. This approach thus already determines the business conditions that operators should consider.
Autonomous unmanned flight certification
Autonomous flight by unmanned aircraft creates challenges to safety assessment and its certification process.
Presently, the certification process for manned aircraft is based on the application of SAE Aerospace Recommended Practices (ARPs) such as ARP 4761: Safety Assessment Process Guidelines and Methods(60) and the SAE ARP 4754: Guidelines for Development of Civil Aircraft and Systems standard(37).
SAE ARP 4754 defines the means to develop a civil aircraft and systems following airworthiness requirements, providing the practices for demonstrating compliance with civil regulations.
This standard covers the development phase and interacts with other available standards such as DO-254/ED-80 and DO178C/ED-12C, ensuring that all elements from individual systems to the aircraft level comply with the available requirements. SAE ARP 4761 defines the guidelines and methods for conducting a safety assessment on airborne systems and equipment showing compliance with the CS/FAR 25.1309 requirement, providing several tools to accomplish the demonstration and being composed of three major phases:
Functional Hazard Assessment (FHA)
Preliminary System Safety Assessment (PSSA)
System Safety Assessment (SSA)
An autonomous flight system may be based on new technologies such as Artificial Intelligence (AI) or machine learning technology. These technologies have not yet been proved to be 100% safe. Extensive batteries of trials and test are required until certification is achieved. The path shall be through available standards such as the SAE ARPs and others developed with the aim of helping to introduce these technologies safely into this new type of aircraft capability.
Continuing airworthiness
All operators shall be approved by the competent CAA.
The operator shall have procedures in place similar to those necessary for normal civil aircraft operators to ensure a safe operating condition.
Safety Management System (SMS) procedures and best practices in accordance with authorities’ requirements shall be applied, although some changes should be included to address autonomous flight for eVTOL aircraft capabilities.
Rules of the air
The rules of the air were developed based on flights by manned aircraft.
As such, it is expected that UAM with unmanned aircraft, either remotely piloted or autonomous, will have an impact on the rules of the air.
This research anticipates that ICAO Annex 2: Rules of the Air enabling UAM with unmanned aircraft will have to be adapted to include specific procedures covering various aspects, such as:
– Safety of persons
– Avoidance of collision
– Flight plans
– Communications
– Air traffic control services
– Interception of unmanned aircraft
– Onboard systems
– Cruising levels
– Emergency situations
– Safety and security
In this context, the ConOps for UAM using unmanned aircraft will depend significantly on the observance of future ‘new’ rules of the air.
4.0 CONCLUSIONS AND FUTURE WORK
A review of concepts dealing with UAM was performed. The stakeholders of the associated process, as well as the type of operators, the types of aircraft under development, the evolution of systems and mostly the nature of the UAM operation, in particular, its severity, were addressed. An autonomous urban air mobility scenario for unmanned aircraft is presented in Table 3.
Table 3 Summary of urban air mobility status

The next part of the paper addressed the notion of ConOps. In general terms, a ConOps can be generated with or without the existence of a certain aircraft. In this case, the option taken was to present what can be considered the content of a ConOps that will assist in defining the ground rules for future UAM using unmanned aircraft, either remotely piloted or autonomous.
The presented ConOps takes into account requirements and constraints, considering equivalent levels of safety required in civil aviation standards covering:
Operation procedures (flight planning; emergency and conflict conditions, etc.)
Interaction between aircraft with different levels of autonomy, which in some cases may not be able to cooperate (VFR piloted aircraft using airspace or small unmanned aircraft operating in the area)
The implementation of ConOps requires additional research work with a focus on the following aspects to enable the adoption of UAM:
– AI solutions for autonomous aircraft for passenger and cargo delivery using up-to-date options, e.g. based on neural networks, agent-based architectures and probabilistic reasoning
– Communications links between aircraft, operations centres, UTM and other aircraft
– Traffic management with optimisation of routes and deconfliction between manned and unmanned aircraft
– The impacts of autonomous flight on certification and level of safety
– Autonomous aircraft objectives in terms of safety, resilience, robustness and reliability
– Integration of aircraft operating under VFR or IFR rules into the UAM framework













